AP1000核电站主汽轮机控制系统(MTC)介绍
2018-04-10田鹏
田鹏
(山东核电有限公司,山东 烟台,265116)
1 概述
AP1000电站主汽轮机控制系统(MTC)是通过自动调节进入汽轮机的蒸汽流量来控制汽轮机的转速及负荷的设备。MTC通过位于中心控制室的可视化操作平台(VDU)控制汽轮机的转速和输出功率,具有升速控制功能、阀门切换控制功能、关闭所有阀门的功能、调节器控制功能、调节器自动跟踪器功能、负荷限制器控制功能、超速保护(OPC)控制功能、自动负荷调节(ALR)功能以及快速降负荷(Runback)控制功能等。
2 操作对象
MTC的控制及操作对象是主汽门(MSV),主调门(GV),再热主汽门(RSV)和再热调节门(ICV),如图1所示。
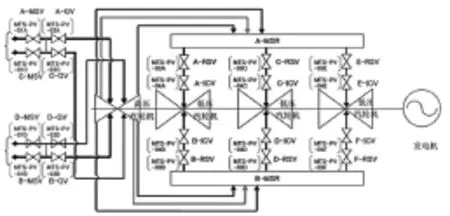
图1 蒸汽轮机蒸汽系统简图
液压系统用作各蒸汽阀门的驱动系统,蒸汽阀门的位置根据MTC的指令信号来调整。这些蒸汽阀门的关系和控制方式如图2所示。
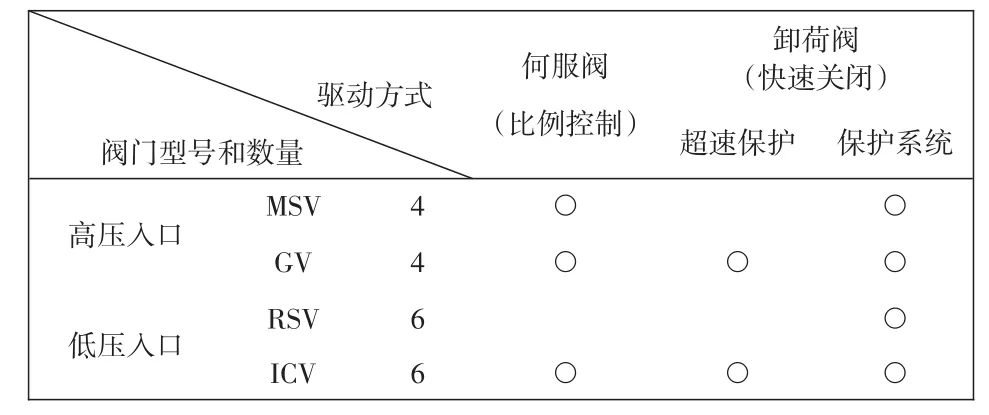
图2 蒸汽阀门数量及控制方式
3 控制功能
3.1 升速控制功能
升速控制是通过MSV(主汽阀)控制流入高压汽轮机的主蒸汽量,按照设定的升速率,使蒸汽轮机升速的功能。MSV的小容量预启阀用于升速控制。由于进入高压汽轮机的主蒸汽量在汽轮机升速过程中较低,因此,在控制机组从盘车转速到额定转速过程中,使用MSV的小容量的预启阀比使用大容量的GV(主汽调节阀)进行升速控制具有更好的效果。
根据规程HYG-MTS-GJP-101附件2(汽机启动)第4.2步:在VDU操作屏幕上选择目标转速并选定升速率后,通过选择程序运行“GO”,使蒸汽轮机以选定的升速率升速到目标转速。汽轮机达到目标转速后,将自动选择程序中的“HOLD”,蒸汽轮机转速保持不变。可选的目标转速值如图3所示,可选的升速率如图4所示。
汽轮机是通过控制MSV的阀位来升速的,MSV的阀位是通过比例反馈来控制的,以便使实际转速与由目标转速和升速率确定的转速参考值一致。由于升速控制是比例控制,会出现控制偏差错误。因此,在MSV阀位指令上增加了作为转速参考值函数的补偿偏差,以尽可能减小转速参考值与实际转速间的偏差。由于在升速控制期间,蒸汽轮机转速是由MSV控制,GV和ICV必须全开。因此,在汽轮机升速前,GV和ICV应通过操作EH AUTO逐渐打开。转速控制方式如图5所示。
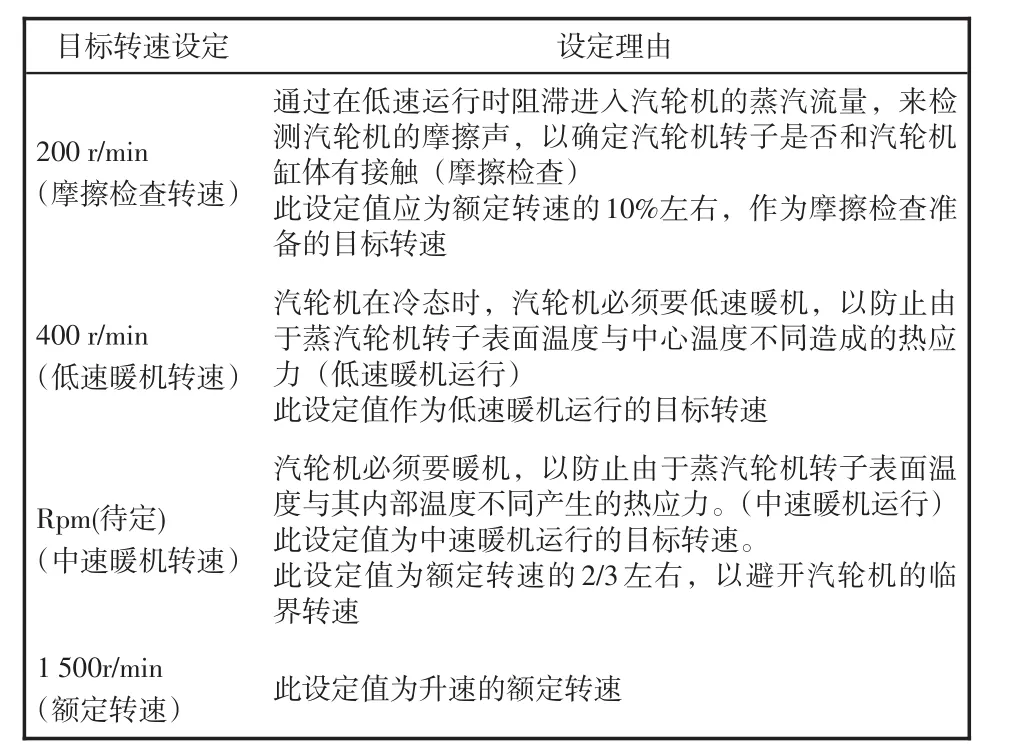
图3 可选的目标转速设定值
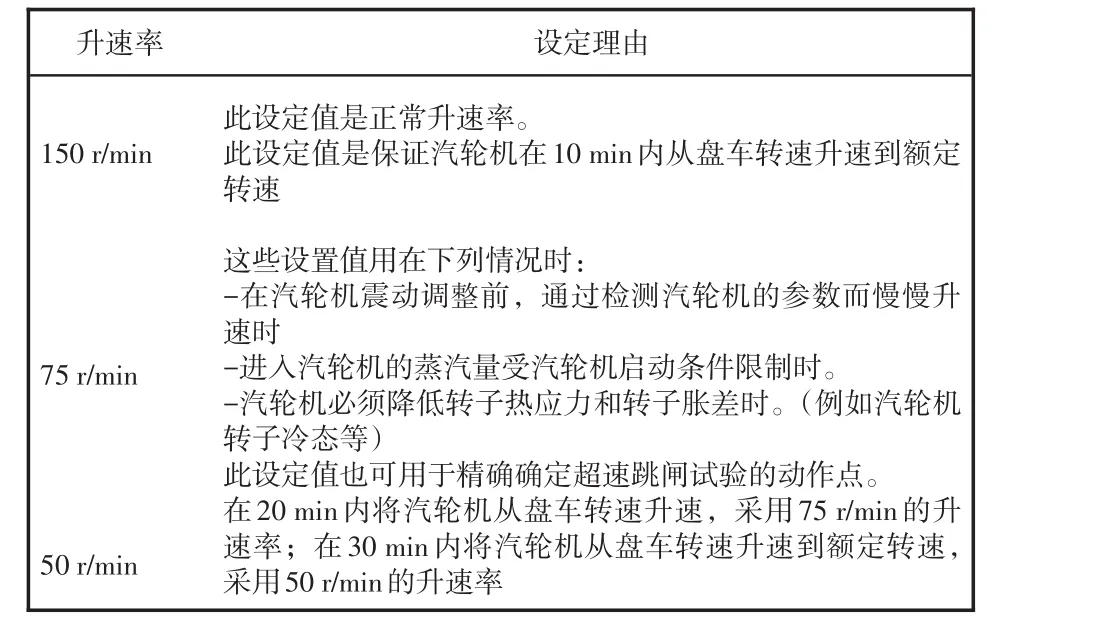
图4 可选的升速率
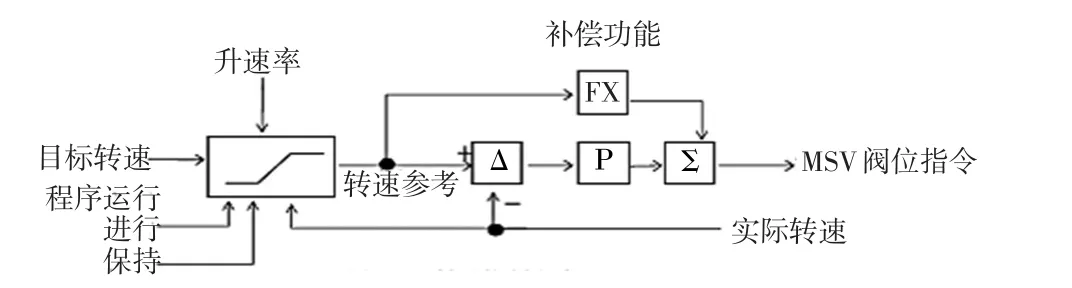
图5 转速控制方式
由于控制响应在升速控制过程中很快,当增加积分控制到比例控制中时,升速控制很容易造成振荡。因此升速控制均采用比例控制。虽然转速给定值与实际转速间的控制偏差可通过增大比例控制增益值来降低,但这样转速控制很容易造成上述的振荡。因此,作为转速参考值函数的补偿偏差被加到MSV阀位指令上,以尽可能减小转速参考值与实际转速间的偏差。
3.2 阀切换功能
根据规程HYG-MTS-GJP-101中附件2(汽机启动)第4.2.15步在VDU操作屏幕上选择“阀门切换”时,首先通过减小升速控制过程中增加在GV阀位指令上的GV全开偏差来逐渐关闭所有GV。如果GV的全开偏差达到0时,通过在MSV阀位指令上自动增加MSV全开偏差使所有的MSV全开。所有的MSV全开后,阀门切换控制结束。在阀门切换过程中MSV和GV的动作情况如图6所示。
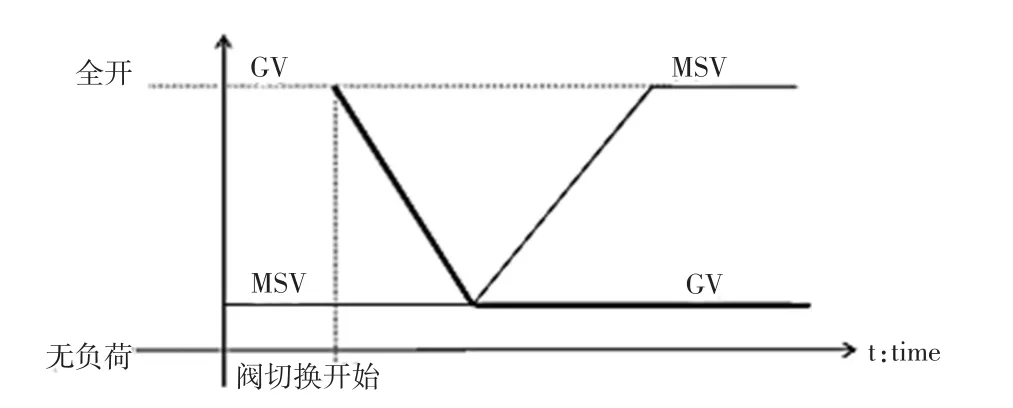
图6 阀切换过程中的阀门动作
3.3 关闭所有阀门的功能
蒸汽轮机跳闸后,所有的MSV,GV,RSV和ICV均通过打开卸荷阀迅速关闭。通过打开卸荷阀来迅速关闭所有的MSV,GV,RSV和ICV可能损坏阀门座。因此,除了必须采用打开卸荷阀来快速关闭所有的MSV,GV,RSV和ICV的时候,利用关闭所有阀门功能,采用伺服阀来逐渐关闭MSV,GV和ICV可以保护阀门座。(例如摩擦检查或蒸汽轮机正常停机操作)
在VDU操作屏上选定了“CLOSING ALL VALVES”时,通过对每个伺服阀发出全关偏差来逐渐关闭所有的MSV,GV和ICV。由于关闭所有阀门功能的误操作会造成严重影响,在并网运行时屏蔽掉“CLOSING ALL VALVES”,防止操作者误操作。由于所有的MSV,GV,RSV和ICV在汽轮机跳闸的时候被全部关闭,此功能也被自动选择,以防止在汽轮机重新复位时,所有的MSV,GV和ICV被打开。选择“CLOSING ALL VALVES”时,所有的MSV,GV和ICV全关,然后“EH AUTO”复位。当选择“EH AUTO”时,“CLOSING ALL VALVES”复位,准备进行自动控制。一旦选择“CLOSING ALL VALVES”,在预定时间“CLOSING ALL VALVES”不能被复位。这段预定时间由MSV全关的时间加上一点裕量决定。
3.4 调节器控制功能
汽轮机转速在阀门切换结束后是由调节器控制的。调节器控制功能的目的是在并网过程中控制电网频率(蒸汽轮机转速)的稳定。GV阀门位置是由调节器控制功能控制的,以便根据电网频率控制汽轮机输出。电网频率(蒸汽轮机转速)可通过随电网频率改变汽轮机输出而稳定调节。解列期间的汽轮机转速由调节器控制功能来控制使其与电网同步。蒸汽轮机输出通过调节器控制额定转速和实际转速间的差值按比例调节。如果运行条件从额定转速工况的100%负荷变为零负荷工况,汽轮机转速(频率)将升高。以上所说的转速(频率)升高的量称为转速不等量或转速不等率(此后称为不等率)。不等率是反应调节器控制特性的指标,如图7所示。
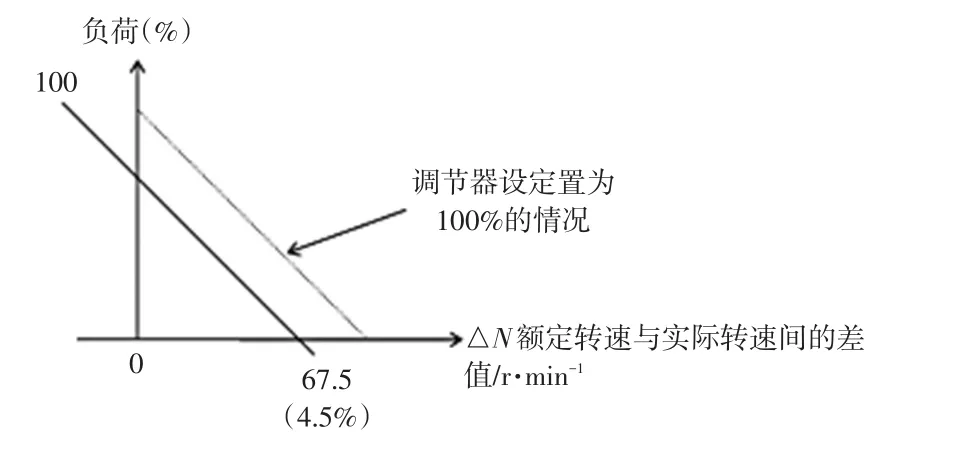
图7 调节器控制过程中转速和负荷的关系
转速不等率信号是利用图8中所示的不等量划分的偏差值计算出的。调节器阀位指令是通过将转速不等率信号加上调节器设置值以后的总和计算出来的。GV的阀位指令(GVPD)是根据负荷限制器的阀位指令和调节器阀位指令二者低选来计算的。负荷限制器阀位指令以后说明。GV阀位指令(0~100%)是用于设置GV阀门位置以及ICV阀门位置的参数,基本与汽轮机输出力(0~100%)相对应。
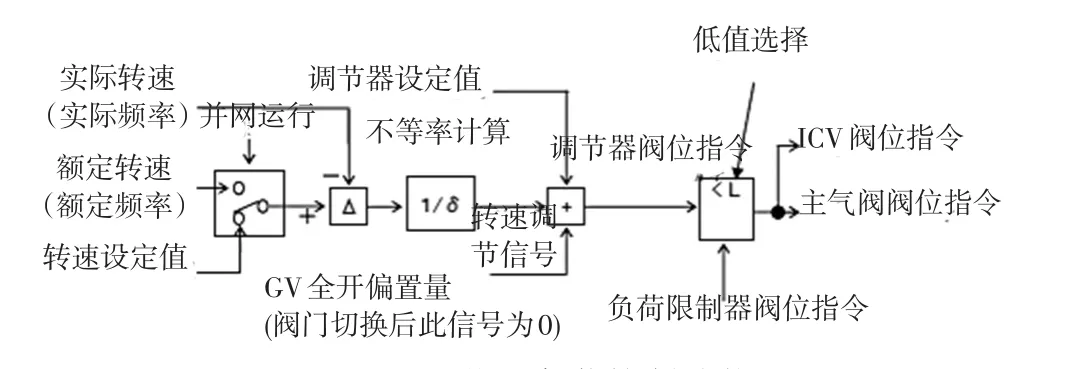
图8 调节器负荷控制功能
由于转速设定值在并网运行前必须能够改变以利于同步(将发电机频率相位调节为电网频率相位),转速设定值通过手动可在±6%(1410~1590 r/min)变化。1410 r/min(-6%)是调节器控制底限,1590 r/min(+6%)是调节器控制的上限。转速变化率从可控制性的角度在升速率(150 r/min,75 r/min,50 r/min)中选择。转速设定值也可由自动同期系统发出的转速设定值增加/降低脉冲量来改变。在并网运行期间,为了根据不等率特性控制负荷,转速设定值转换为额定转速,并且汽轮机出力由调节器来调节。如果选择调节器控制,则在并网运行时汽轮机的输出可通过改变调节器设置来控制。在并网完成的瞬间,调节阀的设置立即跟踪相当于初负荷(5%负荷)的GV阀位指令。当电网频率比额定频率高时,调节器控制GV阀位减小,这就使得调节器阀门有全关的可能性,汽轮机变为电动状态。所谓电动状态即:进入汽轮机蒸汽量比发电所需的蒸汽量少,在发电机并网运行时,发电机就变为一个同步电动机,最终汽轮机是由电网供电的发电机来驱动的。
3.5 调节器自动跟踪功能
调节器自动跟踪功能是指负荷限制器在一定工作期间,调节器设定值自动跟踪负荷限制器的设定值。该功能的设置是为了在电网波动时通过调节器控制装置关闭GV。根据公司规程附件2(汽机启动)第4.2.19步:在汽机并网并带上5%负荷以后,在VDU操作屏上选择调节器自动跟踪功能后,调节器设定值自动跟踪负荷限制器设定值和跟踪宽度(10%)的和。当电网频率增加到50.225 Hz后,由于频率升高,GV关闭,运行模式变为调节器控制。如图9所示,通过运行调节器自动跟踪功能,运行模式自动并立即转换为负荷限制器运行。利用调节器自动跟踪功能,可以很容易地从调节器控制转换为负荷限制器控制而不会出现负荷波动。
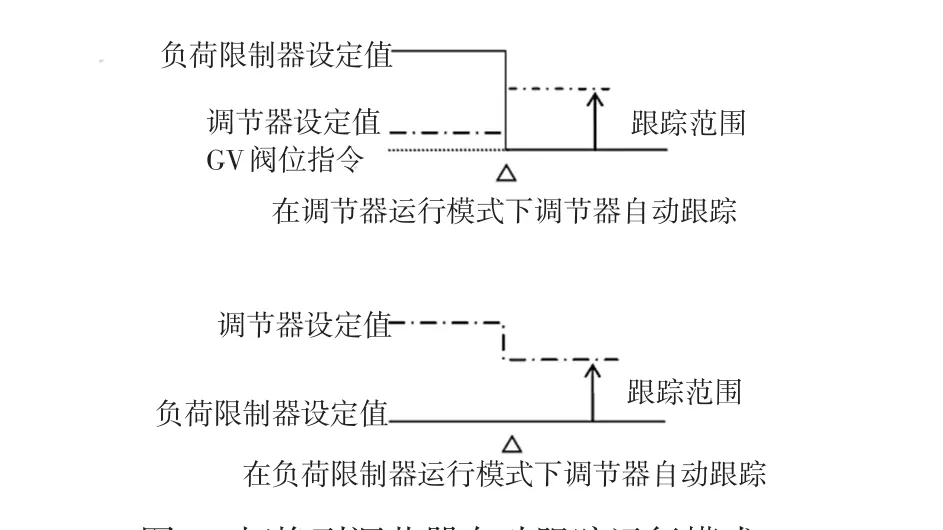
图9 切换到调节器自动跟踪运行模式
3.6 负荷限制控制功能
由于电网频率波动等引起GV阀位指令大幅波动,可以通过负荷控制功能限制进入汽轮机的蒸汽量。当负荷限制器阀位指令小于调节器指令时,汽轮机运行模式从调节器运行模式切换为负荷限制器运行模式。GV和ICV阀位由负荷限制器设定值保持,在并网运行时,该设定值可随意更改,而无需考虑电网频率。如果通过VDU操作屏降低负荷限制器设定值使得负荷限制器阀位指令小于调节器指令,汽轮机控制模式切换为负荷限制器运行模式,GV和ICV阀门位置被保持。汽轮机运行模式也可通过选择调节器自动跟踪功能很容易地从调节器控制切换为负荷限制器控制。电网频率(汽轮机转速)与GV阀位指令间的关系如图10所示。
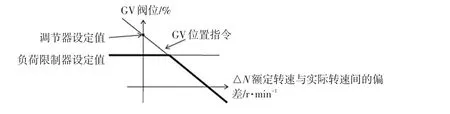
图10 电网频率与GV阀位指令间的关系
负荷限制器设定值上限是130%,负荷限制器设置值下限为-50%。负荷限制器设定值上下限与调节器的设置值确定方法相同。负荷限制器设定上限(130%)是为了与所有GV阀门全开点(120%)的负荷限制器设定值之间有一定的裕量而选定的。负荷限制器设定下限(-50%)是为了与所有的ICV阀门全关点(-30%)的负荷限制器设定值之间有一定的裕量而选定的。
在汽轮机停机状态(功能闭锁)时,负荷限制器设定值自动设置为下限(-50%),以便彻底安全的关闭GV。在汽轮机启动时,“CLOSING ALL VALVES”功能将通过“EH AUTO”运行复位,然后通过全开偏置打开GV和ICV,以便由MSV执行升速控制。同时,负荷限制器设定值设定为上限(130%),以使GV和ICV能够全开。由于解列时调节器设定值设定为0%(等于无负荷),在解列时负荷限制器控制设定值自动设定为上限(130%),以便于通过调节器控制装置控制汽轮机转速。(说明:除汽轮机启动或解列以外,在选择“EH AUTO”后,负荷限制器设定值可手动更改。目的是在电网频低的情况下执行并网运行时,限制GV阀位指令的增大,见图11。
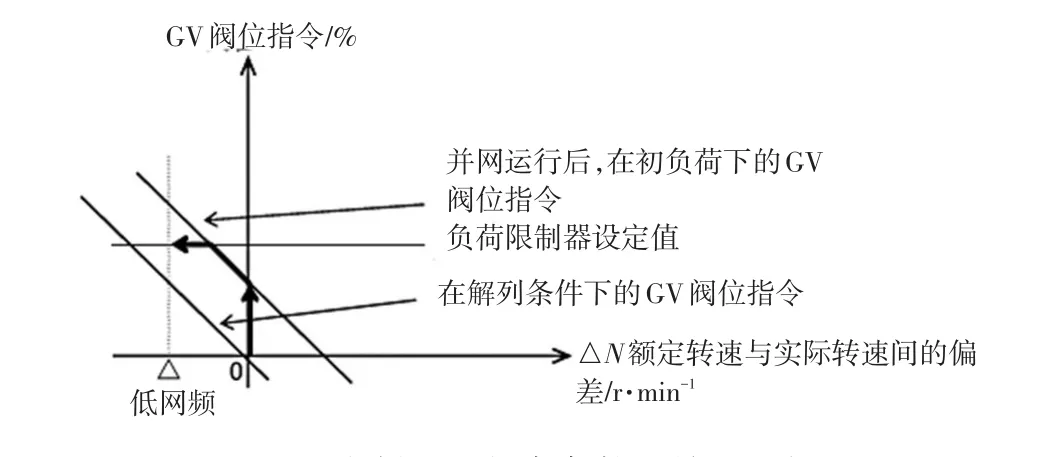
图11 在低电网频率条件下并网运行
3.7 超速保护控制器(O PC)功能
OPC是通过监测超速预感器并快速关闭GV和ICV,以防止汽轮机超速。OPC根据汽轮机转速上升和负荷不平衡间的关系监测汽轮机超速预感器。负荷不平衡根据汽轮机出力(低压缸进汽压力)和发电机负荷之间的差来计算。OPC监测到汽轮机超速预报时,OPC电磁阀通电,危急跳闸油排出。GV和ICV的卸荷阀被危急跳闸油泄油打开,由于GV和ICV的卸荷阀打开,从而使GV和ICV完全迅速关闭。
为了抑制汽轮机转速升高,保护汽轮机,OPC不仅能快速反应而且还需在CPU发生故障时保持工作。因此OPC功能不是配置在主汽轮机控制系统软件中而是配置在单独的硬件模块中。根据转速上升和负荷不平衡之间的关系,当OPC检测到超速预报时,OPC动作,防止汽轮机超速跳闸。如果汽轮机在负荷不平衡较低的条件下(30%或以下)不是很快速加速时,OPC将在汽轮机转速达到107.5%或以上时动作。如果汽轮机在负荷不平衡较大的情况下(30%或以上)迅速加速时,OPC将在汽轮机转速函数和负荷不平衡函数之和达到一个固定的设定值时动作,见图12(a)。在解列情况下,汽轮机负荷较小,汽轮机容易加速。因此除了上述情况外,OPC还将在解列情况下如负荷不平衡超过30%时动作,见图12(b)。
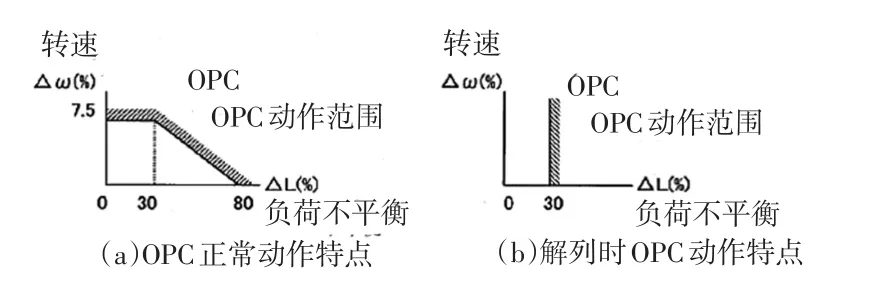
图12 OPC动作特点
需要说明的是:采用低压缸进汽压力(ICV后压)作为汽轮机输出功率的原因如下:正常运行时汽轮机输出功率与汽轮机的压力成正比。由于负荷突然降低或甩负荷使得GV和ICV全关时,GV与ICV间的蒸汽被密封,其压力保持在先前的水平。由于此时蒸汽压力与汽轮机输出功率不成正比,此蒸汽压力不能作为汽轮机输出功率。因此在OPC判断时,将低压缸进汽压力作为汽轮机输出功率。
采用发电机电流作为发电机输出功率的原因是为了防止由于传输线路中发生接地故障时OPC的误动作。即使发生接地故障时,一般安装在电网上的保护继电器能在几个Hz内恢复故障,在此期间汽轮机不会超速。因此在发生接地故障时OPC无需动作。发电机电流不低于接地故障先前的水平,但发电机功率降低了。如果发电机功率用作OPC判断时的发电机出力,由于发电机功率降低引起负荷不平衡,OPC将由于接地故障而误动作。因此采用发电机电流作为OPC判断时的发电机输出功率。
3.8 自动负荷调解器(A LR)功能
ALR(自动负荷调解器)的用途是降低操作员的操作压力,ALR的功能是自动以缓慢的变化率增加或降低负荷。负荷目标值和负荷变化率可随意设置。ALR增加或降低指令是根据实际负荷与ALR指令间的差值来计算的,见图13。通过将ALR增加或降低指令加在负荷限制器设定值上来控制负荷。当选择ALR OUT模式切除时,ALR指令跟踪实际负荷,以便在ALR模式从切除转换为投入时不使负荷产生波动。由于在选择ALR模式切除时,ALR指令跟踪实际负荷,实际负荷就相当于ALR指令,在ALR模式从OUT(切除模式)转换为IN(投入模式)时,ALR增加或降低指令是从零开始的。因此ALR模式由切除转换为投入模式时负荷不会有波动。
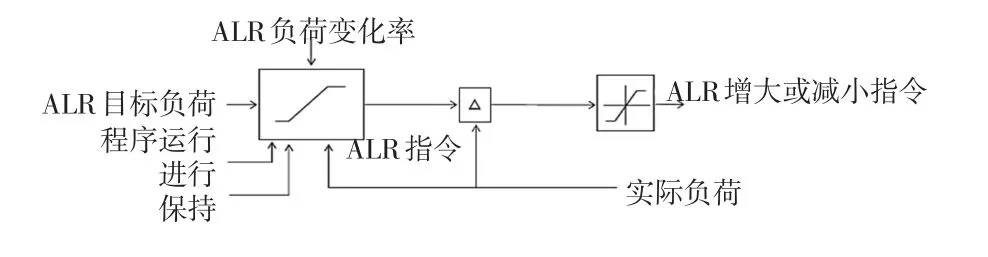
图13ALR控制功能
可手动选择投入或切除ALR功能。ALR控制模式与ALR程序运行模式是分开的,以便能够与其它功能结合。根据公司规程中附件2(汽机启动)第4.2.23步:汽机并网后的升功率就是在ALR运行模式下进行的。在选择ALR程序运行“GO”后,负荷以选定的ALR负荷变化率变化到ALR目标负荷。如果负荷达到了ALR目标负荷,ALR程序运行模式从“GO”(进行)转换为“HOLD”(保持)。在手动选择ALR程序运行模式“HOLD”时,ALR指令保持当前值。ALR负荷变化率可以把0.1%作为最小单位,在(0.0~300%)/h任意设置。ALR目标负荷设定值可在5%~100%设置。上限设置为额定负荷。下限设定为5%的初负荷,以防止发生逆功率情况。
3.9 快速减负荷(Ru n b a c k)控制功能
快速减负荷控制功能是使负荷限制器设定值和调节器设定值按照固定的负荷变化速率降低。
4 总结
设置主汽轮机控制系统的目的是为确定汽轮机蒸汽阀门的开度,包含提供汽轮发电机控制、试验、保护、定位汽轮机截止阀的开度、截断蒸汽流的手段、转速和负荷的手动及自动控制。总共有20个向主汽轮机供汽的液压驱动阀门其中包括4个MSV、4个GV、6个ICV和6个RSV。所有的MSV、GV和ICV可在全关位和全开位之间比例调节开度。此外,该系统还提供主汽轮机转速监测和控制以及负荷控制的信号。最后,当汽机发生超速时,OPC动作抑制汽轮机转速升高,保护汽轮机。
[1]张文君.AP1000核电T系统与设备教程[M].烟台:山东核电有限公司,2010.
[2]丁飞.AP1000数字化仪控教程[M].烟台:山东核电有限公司,2012.
