基于LV8731V的步进电机细分驱动器设计
2018-04-10彭宇林覃贵礼梁维刚
彭宇林,覃贵礼,安 轲,梁维刚
(1. 广西职业技术学院,广西 南宁 530226;2. 广西师范大学 物理科学与技术学院,广西 桂林 541004)
0 引 言
步进电机是一种由脉冲信号控制产生角位移、无位置累积误差的开环可控元件。在允许载荷情况下,步进电机的转速、角位移由脉冲信号频率和脉冲数决定。由于步进电机转动的步距角与控制信号脉冲数存在线性关系,故其速度、转角度均能精准控制,因此步进电机在数控系统、工业过程控制等领域广泛应用。
本文根据步进电机的工作原理及应用,介绍一种基于LV8731V芯片的步进电机细分驱动器的设计方案及其实现电路图。本设计不仅适用于高校机电类或电气自动化类专业相关课程的教学与实践,也适用于实际生产生活中的机电一体化设备。
1 细分驱动器方案设计
本设计采用电机控制芯片LV8731V设计驱动器主电路,高速光耦TLP112A实现控制信号隔离,拨码开关设置细分模式及输出电流,芯片LM78M05和AMS1117-1.5提供5 V和1.5 V工作电压。细分驱动器的设计方案如图1所示的虚线框部分。
2 细分驱动器主要硬件电路设计
2.1 驱动器主电路
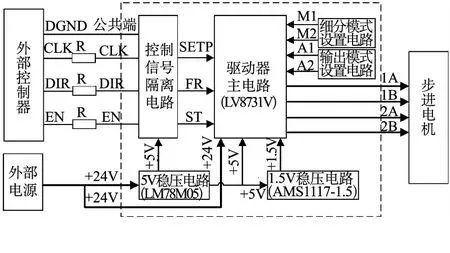
图1 细分驱动器设计方案
LV8731V是三洋公司的双通道H桥驱动芯片,内置PWMV电流控制步进电机驱动芯片,其包含2种驱动模式,分别为DCM模式和STM模式。LV8731V额定工作电压为9~32 V,输出峰值电流为2.5 A;超低导通电阻(0.55 Ω),具有内置输出短路保护及异常状态警告输出功能;可设置4档通电电流模式, 4种细分模式。LV7831V内部电路原理框图[1]如图2所示,其主要信号引脚及功能[1]如表1所示。
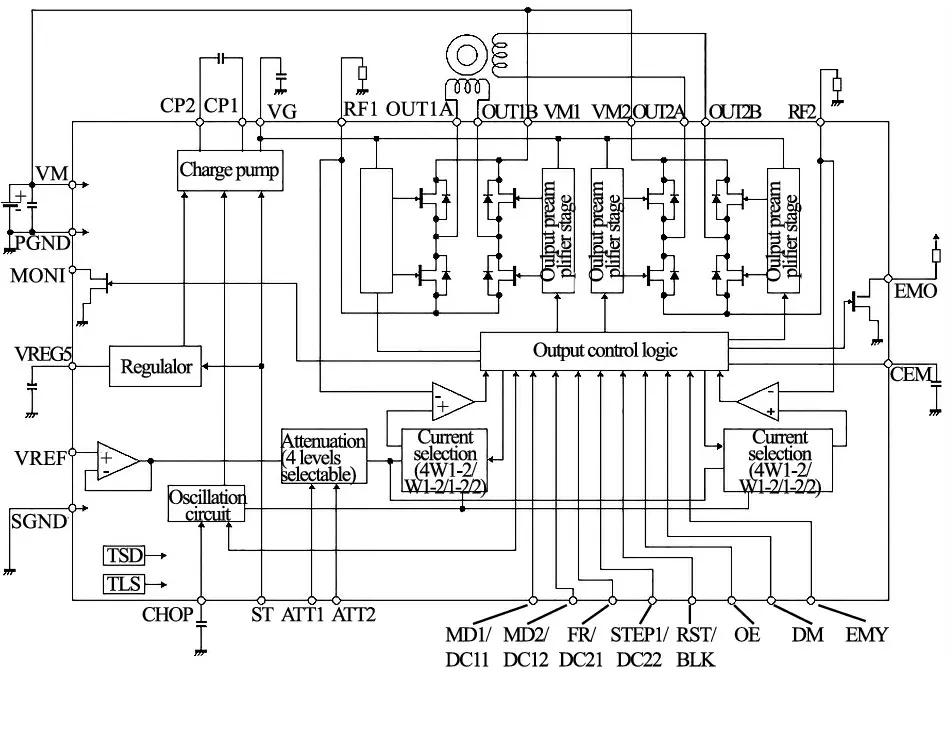
图2 LV7831V内部电路原理框图
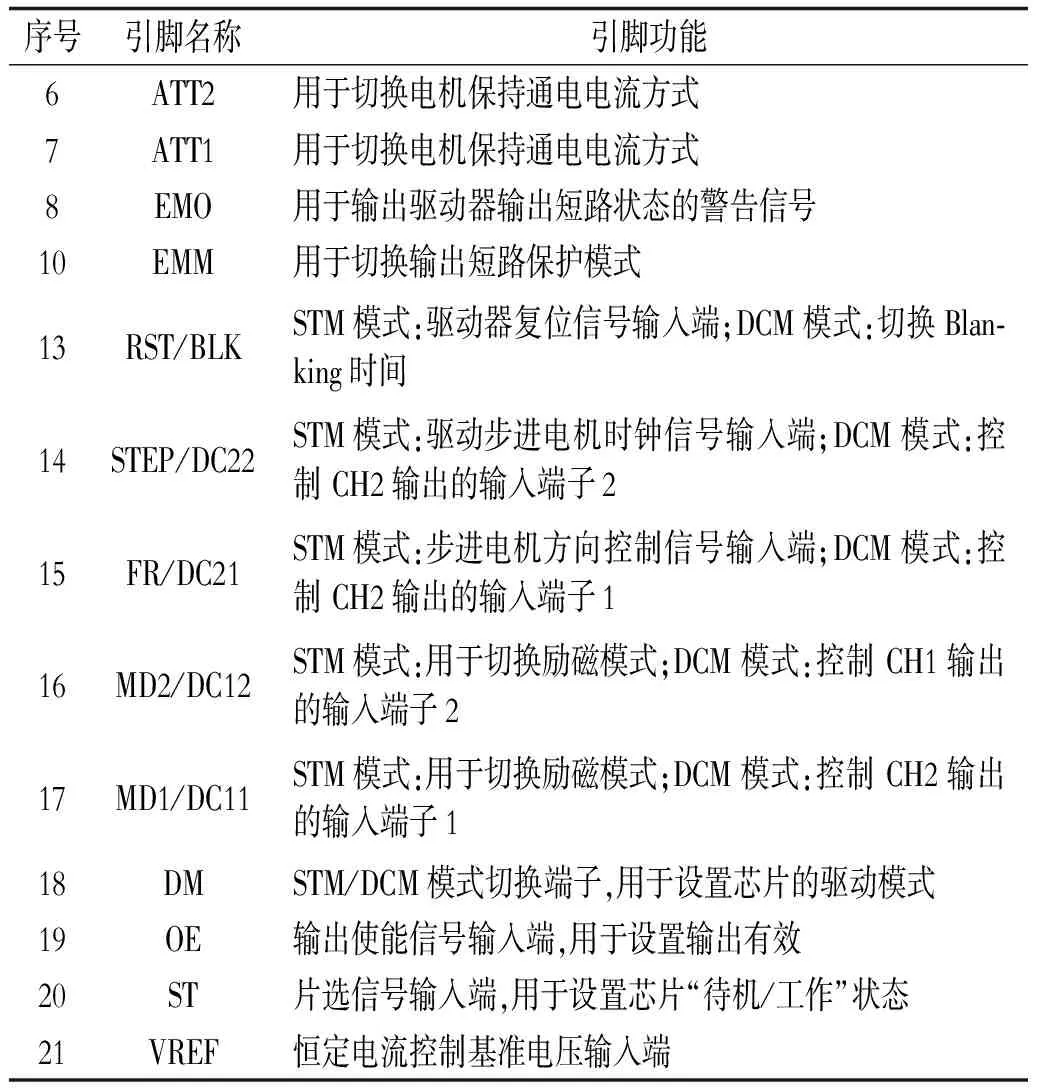
表1 LV8731V主要信号引脚及功能
本设计的主电路原理图如图3所示,DM(引脚18)、RST/BLK(引脚13)和OE(引脚19)均接地,将驱动器设置为正常工作状态的STM驱动模式,且输出有效;通过MD1/DC11(引脚17)和MD2/DC12(引脚16)设置驱动器细分模式, ATT1(引脚7)和ATT2(引脚6)设置驱动器的输出电流;外部控制器与细分驱动器之间连接3个控制信号即可驱动步进电机,控制信号分别为STEP/DC22(引脚14,即控制脉冲信号)、FR/DC21(引脚15,即方向控制信号)和ST(引脚20,即 “待机/工作”状态设置信号)。
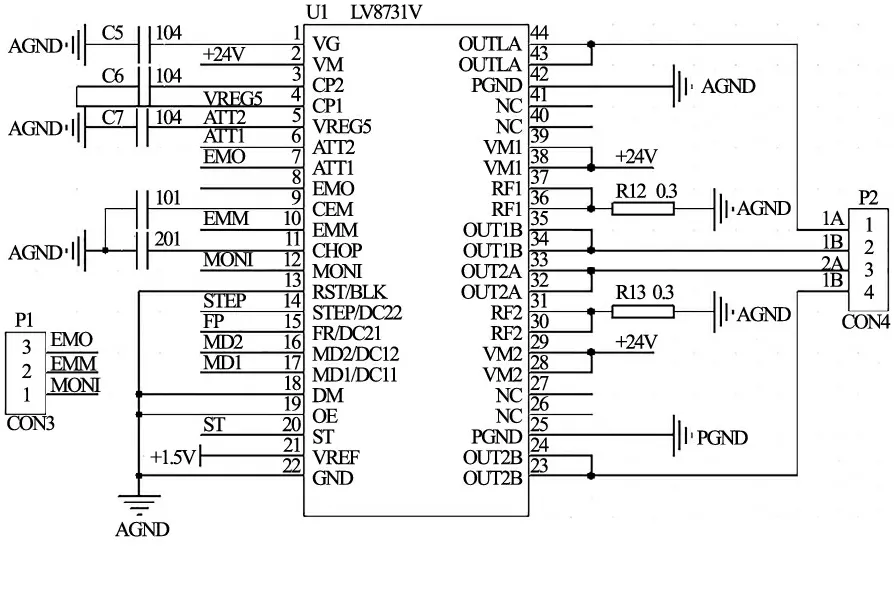
图3 驱动器主电路原理图
2.2 控制信号隔离电路
为防止电机工作时干扰或损坏外部控制器接口,通常将控制器与驱动器进行光电隔离,且控制器和驱动器均采用单独电源供电。本设计的控制信号隔离电路如图4所示,采用3个高速光耦TLP112A分别隔离3个控制信号STEP/DC22(引脚14)、FR/DC21(引脚15)和ST(引脚20),即步进电机转速和角度、方向控制信号及使能信号。本设计的光耦TLP112A采用共阴输入及反向输出接法,DGND为外部控制器公共地,AGND为驱动器公共地,AGND与DGND不相连。经隔离后,驱动器控制接口CLK、DIR和EN经光耦反向后分别与STEP、FR和ST相连。步进电机运行所需控制信号STEP、FR和ST设置[1]如表2所示。
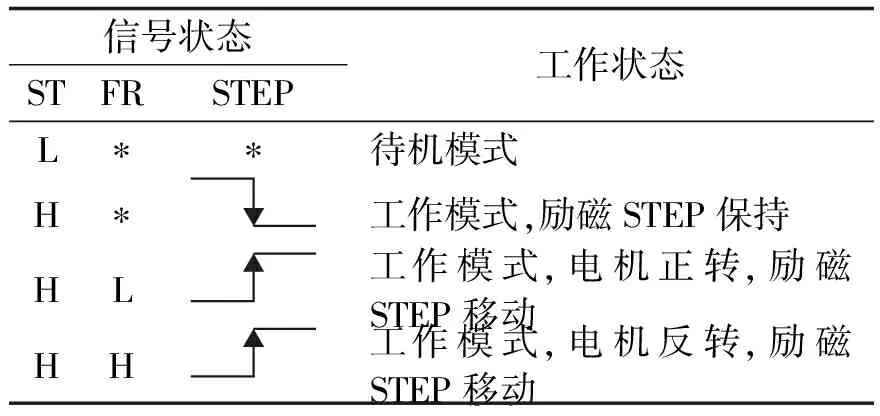
表2 STEP、FR和ST设置

图4 控制信号隔离电路
2.3 细分模式、输出电流设置电路
本设计采用拨码开关和上拉电阻设置驱动器的励磁模式和细分模式,及其输出电流,如图5所示。通过MD1/DC11(引脚17)和MD2/DC12(引脚16)设置驱动器的励磁模式和细分模式[1,2],如表3所示。
根据ATT1(引脚7)与ATT2(引脚6)的4种不同输入状态,设置基准电压VREF的衰减比以设置驱动器输出电流。ATT1、ATT2状态与基准电压UREF衰减比关系[1-2]如表4所示。输出电流(Iout)由基准电压值UREF、电阻RF和基准电压衰减比决定。根据如下公式[1],可算出驱动器输出电流。本设计R12和R13阻值均选用0.3 Ω。
Iout=(基准电压值UREF/5)×(基准电压衰减比)/RF

图5 细分模式和输出电流设置电路

表3 励磁模式、细分模式
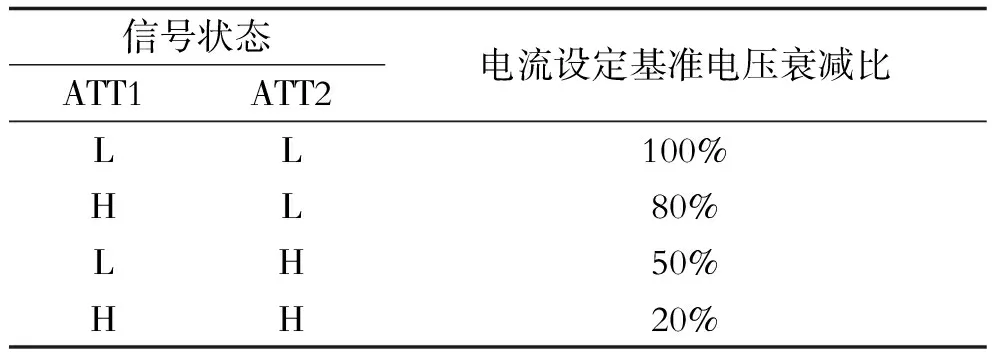
表4 ATT1、ATT2状态与基准电压衰减比关系
3 驱动器测试与应用
本设计采用Arduino UNO单片机和三菱FX3G系列PLC对57两相步进电机进行测试,测试方案如图1所示。若控制器I/O口为5 V电平时,接口保护电阻R直接短路连接即可;若I/O口电平为12 V或24 V时,电阻R分别接1 kΩ或2.2 kΩ。当EN 输入低电平或悬空时,ST为高电平,则电机正常工作;反之,脱机。在电机正常工作情况下,当DIR输入低电平或悬空时,FR为低电平,则电机正转;反之,反转。测试过程中,将驱动器设置为不同细分模式及不同输出电流模式,控制器输出脉冲信号频率在10 kHz内可调,步进电机正常稳定工作,转速可控,达到预期设计目标。
本设计已用于自主研制的多功能三维运动教学演示装置,并能精确控制演示装置的X、Y、Z三个轴,取得较好效果;此外,学生还用于参加学科竞赛的作品设计,并取得较好成绩。
4 结束语
本文提出基于LV8731V的步进电机细分驱动器的解决方案,完成了驱动器的电路图设计,并通过实验测试。本设计已应用于教学和实践,效果良好,达到预期设计要求。
参考文献:
[1]SANYO.LV8731V—PWM Constant-Current Control Stepping Motor Driver[EB/OL]. https://wenku.baidu.com/view/6c98a5ed4afe04a1b071ded3.html,2009-05-12.
[2]唐艳芳.基于STM32水处理装置控制系统的研发 [D].泉州:华侨大学(硕士论文),2014.
[3]卢贶,宋霞.基于TB6560步进电机驱动系统的设计[J].武汉船舶职业技术学院院报,2013,(4):36-40.
[4]王党利,宁生科,马宝吉,等.基于TB6560的步进电机驱动电路设计[J].单片机与嵌入式系统应用,2010 , 10 (1) :41-43.
[5]陈兴文,刘燕.基于单片机的步进电机细分驱动器设计[J].电机与控制应用,2009 , 36 (7) :30-33.
