物联网与云技术支持下的水平角测量信息化实训教学设计
2018-04-08薄志毅李长青赵小平陈绪军
郑 阔,薄志毅,李长青,赵小平,陈绪军
(1. 北京工业职业技术学院,北京 100042; 2. 北京奥腾岩石科技有限公司,北京 100176)
教育信息化是国家信息化的重要组成部分,是改革教育理念和模式的深刻革命[1]。随着物联网和云技术的快速发展,相关技术也已经普遍运用到信息化教学中。但是在工程测量基础教学,尤其是基于全站仪的实训教学中,相关技术还鲜有应用。本文基于拓普康WINCE全站仪开发物联网与云模块,实现了水平角测量实训云教学平台。该技术对其他全站仪、测量机器人相关教学及实际生产工作均具有借鉴意义。
1 水平角测量实训教学分析
本次实训内容选自高职高专十二五规划教材《建筑工程测量》课程项目3“水平角测量”,课时设计为4学时。水平角测量是建筑施工测量、竣工测量、变形监测等工程中的基础内容,主要方法有测回法和方向法,使用的主要仪器有经纬仪、全站仪。本实训以施工测量放样点角度检核任务为依托,使用全站仪测回法进行放样点与已知方向水平角测量工作。通过本项目的训练,完成知识、技能、素质培养与提高的教学目标。
本项目授课对象为建筑工程技术专业二年级学生,学生前期已经学习了相关专业课程,对测量知识有了需求认知,但是面对全站仪结构图,感觉复杂不直观、测角原理抽象难理解,仪器操作还需规范。
由教学内容和学情分析确定本次教学的重点为全站仪水平角测量操作;教学的难点为水平角测量原理与精度判定。
2 水平角测量实训教学策略
根据对教学重点和难点的剖析,本次教学要点为原理理解、结构认知、仪器操作、数据计算。
水平角为地面上一点到两目标的方向线投影到水平面上的夹角,水平角的测量是利用平行于水平面的水平刻度盘和观测方向线在刻度盘上读数的指标进行的。
针对水平角定义和测角原理,通过二维动画、游标经纬仪视频,将抽象原理形象化,便于学生理解掌握,解决教学难点问题。
全站仪结构复杂,功能构件多,因此熟练认知操作是水平角测量的重要基础技能。
针对以上问题,通过三维虚拟仿真软件,学生可360°熟悉仪器部件,反复练习。
水平角测量流程可分解为对中整平、瞄准调焦、盘左盘右一测回观测3大环节。各环节独立练习,提高了学习效率。同时对每个环节制定学习内容和要求标准,辅以信息化手段,加强操作练习效果,解决教学重点问题。
结合实际记录案例,动态布置在Excel表中设计制作水平角测量记录手簿任务,加深学生对水平角观测记录计算精度判定的理解与掌握。
通过对全站仪软硬件的开发,实现了水平角测量云教学平台,使实训教学与管理高效化。平台由机载水平角测量软件、服务器及网页端、全站仪无线云模块组成。整个实训教学从重难点出发制定教学流程,对应不同的教学方法,采用高效的信息化手段达到预定的教学目标。
3 水平角测量云教学平台
3.1 全站仪无线云模块
云教学系统最核心的功能为首次在全站仪上实现了测量数据云端管理的数据管理模式,即俗称的“云模式”。在拓普康品牌的OS、DS、PS、MS系列等采用WinCE平台的全站仪设备,只需要将云模块通过USB口安装到全站仪上,就可以直接使用,无需任何仪器改装,真正做到即插即用。而且,数据的云端管理还只是系统模块的最基本功能,它内含GNSS定位模块、3.5 G网络通信模块等,优良的做工及完善的后处理软件的支持,使整个全站仪测量教学与工作产生了革命性的改进。云模块功能构成如图1所示。
3.2 机载水平角测量软件
全站仪工作时不仅要保证测量数据的高精度及准确性,更要注重数据的安全性和整体工作的高效率。在以往工作中,时常会出现由于仪器损坏造成的数据丢失、数据管理问题造成的漏测和错误测量,以及最常见的由于控制数据和测量数据进行交互耗费大量的时间精力导致的整体工作效率低下,因此配套开发了水平角测量系统机载软件,利用边测边
上传的模式,杜绝了数据丢失的尴尬问题;利用随时调用服务器控制数据及当前测量任务,彻底避免了返工的情况发生;利用实时得到的外业信息,极大加快了内业的作业效率。软件主要工作界面如图2所示。
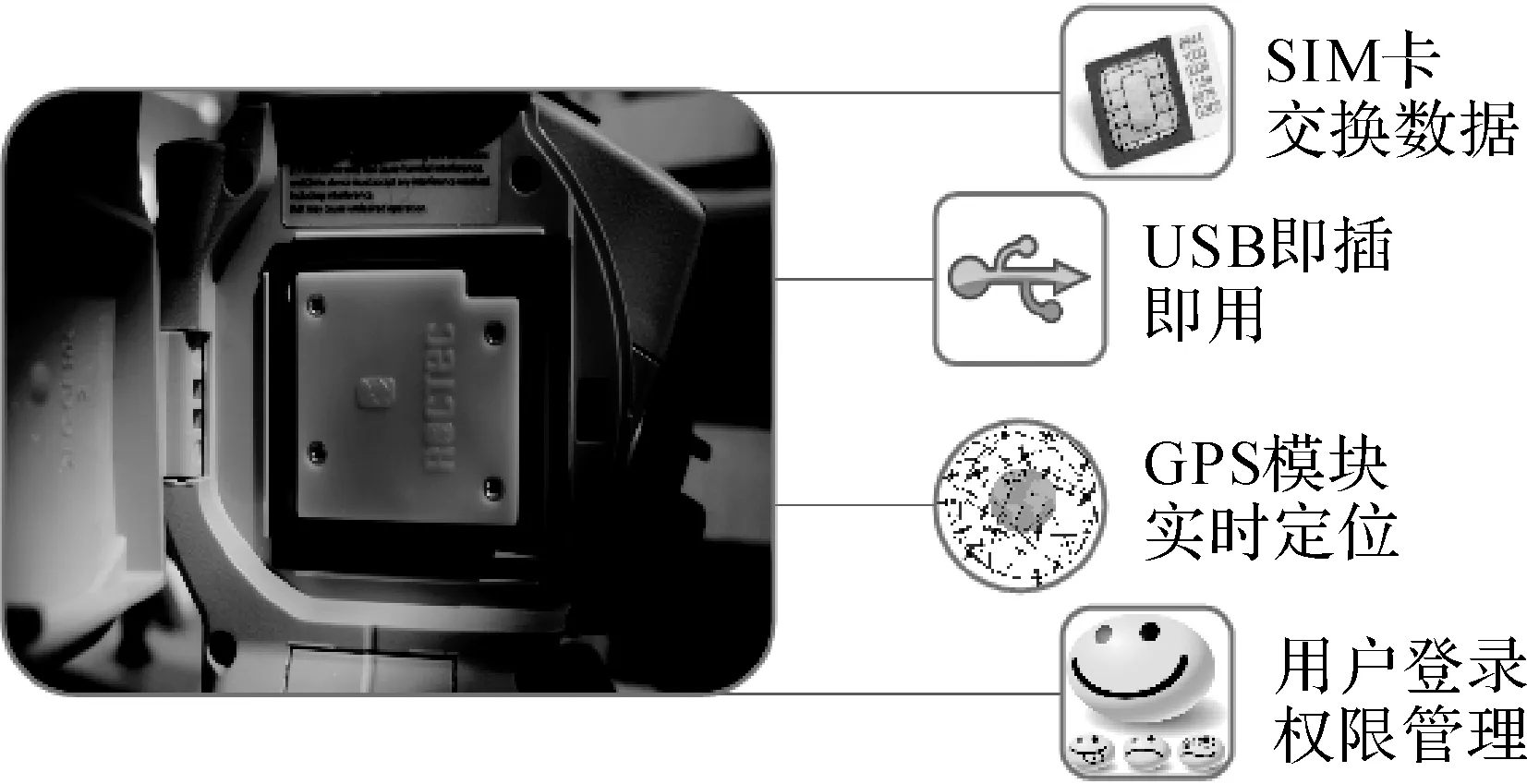
图1 云模块功能构成
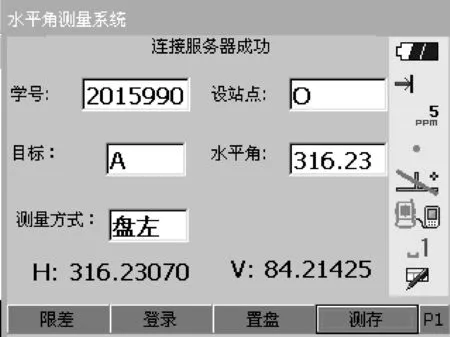
图2 水平角测量系统
3.3 服务器及网页端
实训教学通过云平台进行全过程监督与管理。首先教师在服务器录入学生信息,观测前学生通过机载软件按学号登录服务器,观测过程中学生除了现场记录计算外,测量数据随测、随传、随存、随查,合格数据可生成成果报告;教师实时了解学生测量过程数据质量并及时指导,监督学生实测数据的真实性,避免涂改原始数据,培养学生诚信意识。云管理功能构成如图3所示。
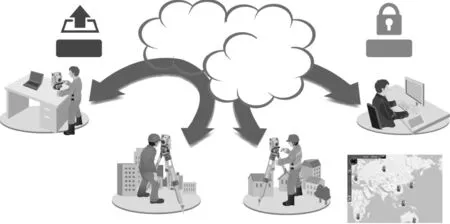
图3 云管理功能构成
4 教学实施
课前教师利用水平角测量知识微信微传单发放预习资料,学生可以随时随地自主学习、理解原理。
教师通过网络课程发布任务书和辅助学习资料,学生以小组为单位接收任务、学习知识、完成测试。教师批改作业,根据学习反馈调整教学设计。
课堂促做过程分为仿真操作(45 min)、任务创设(10 min)、教师演示(35 min)、学生练习(45 min)、任务完成(30 min)5个教学环节。
4.1 仿真操作
全站仪操作过程复杂,灵敏度高,操作不当容易导致设备损坏,因此采用先模拟练习、后实操的教学方式。
模拟操作包括学习训练和任务考核。其中学习训练模块学生可灵活选择水平角测量的不同环节进行练习,实现个性化、差异化教学。
任务考核模块学生可及时自行考核,系统自动评定成绩。
4.2 任务创设
模拟仿真结束后进入任务创设阶段,在实习现场指导学生对已知方向OA、测站O、待检核点B的踏勘,布置仪器架设与水平角测量任务。
4.3 教师演示
在学生实测之前,教师先进行示范。首先是对中整平,教师与学生互动操作,做中教,做中学。
瞄准目标的步骤为粗略瞄准、精确瞄准、消除视差。教师在此环节讲解仪器构件名称、使用方法及安全注意事项。
观测分为盘左盘右两个半测回。①首先盘左瞄准目标A,配度盘至0000′00″,读取a1。顺时针旋转仪器照准部瞄准目标B,读取b1。则上半测回角值:β1=b1-a1。②盘右瞄准目标B,读取b2,逆时针旋转照准部瞄准目标A,读取a2。则下半测回角值:β2=b2-a2。若β1β2较差小于限差要求,则取均值为水平角角度值。
观测过程中及时将观测数据记录到手簿中,采取偶舍奇进原则计算一测回角度值,检查数据是否合格。
4.4 学生练习
教师完成示范教学后,各小组首先操作练习,教师分别指导,及时解决问题。
4.5 任务完成
任务完成阶段,采用小组竞赛的方式,教师与学生共同裁判。水平角测量在线管理如图4所示。
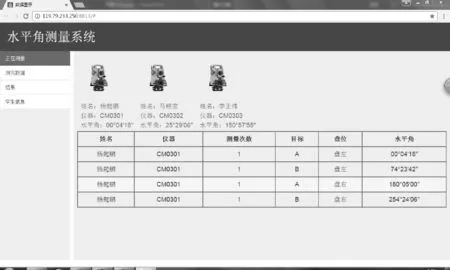
图4 水平角测量在线管理
5 结 论
信息技术改变了传统教学。本次实训教学的创新点主要有:
(1) 实现了测量实训云教学平台,增强了教学指导针对性,避免了学生测量不规范行为。
(2) 虚拟仿真与电子手簿制作与使用,通过独具特色的教学方式使学生对仪器操作的规范度提高,对知识掌握的理解加深,能有效解决教学重点难点,具备独立解决问题的能力,使得学生参加各级技能大赛的积极性和成绩逐年提高。
此外,基于本系统的设计理念,水平角云教学平台可以推广为包括学生管理、设备管理、成绩管理等内容的完整实训教学与管理系统,并进一步开发为基于全站仪的远程测量与管理系统。鉴于学生成绩与测量数据的客观性与保密性,系统可进一步进行权限管理与加密功能。通过对用户的权限等级设置,可以具有不同的控制数据能力,如最高权限的管理员,可以查看到使用设备的作业地点、状态、工作时间、数据使用情况甚至是远程锁定及修改数据等,具有完全支配设备的权力。同样,负责内业数据处理的人员则可以实时地进行数据级别的调取和查看,而对设备本身的工作状态等信息无法查看。因此可以根据工作人员所负责的具体工作,制定不同的管理权限方案,在批量设备的大型项目上发挥至关重要的管理帮助。权限等级设置功能见表1。
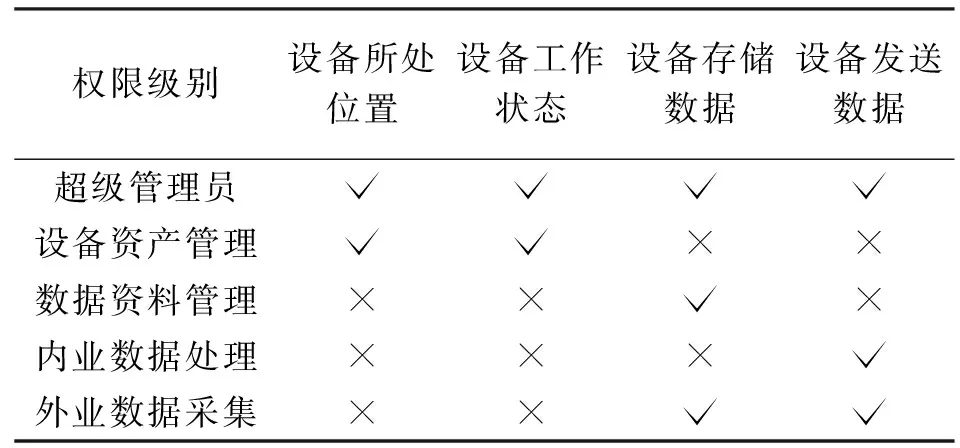
表1 权限等级设置
参考文献:
[1] 教育部职业院校信息化教学指导委员会赛事工作专门委员会(筹).全国职业院校信息化教学大赛部分优秀作品点评[M].北京:高等教育出版社,2016.
[2] 徐茂林,张贺,李海铭,等.基于测量机器人的露天矿边坡位移监测系统[J].测绘科学,2015,40(1):38-41.
[3] 王盼,吴兆福,张怀亮.测量机器人远程控制应用设计[J].工程勘察,2017(2):49-52.
[4] 杜永文,屈应照,龙淼.信息推送服务在农业物联网中的应用研究[J].工业仪表与自动化装置,2017(2):22-26,34.
[5] 魏叶青,岳建平,齐冬梅.基于WinCE的嵌入式工业测量系统研究与开发[J].测绘通报,2009(10):38-40.
[6] 王佩贤,马真安,孙艳崇.基于GPRS的WinCE GTS-720全站仪数据自动传输研究[J].测绘科学,2008,33(6):36-38.
[7] 孟小亮,边馥苓.空间信息与传感器网络课程建设实践探索[J].测绘通报,2014(12):122-124.
[8] 刘经南.大数据与位置服务[J].测绘科学,2014,39(3):3-9.
[9] 何寿福.无线通信技术在测绘工程中的应用研究[J].通信技术,2012(7):94-96.
[10]余腾,胡伍生,周立,等.高校测绘工程专业“测量仪器学”课程的改革与实践[J].测绘通报,2017(5):147-151.
[11]吴战广,张献州,张瑞,等.基于物联网三层架构的地下工程测量机器人远程变形监测系统[J].测绘工程,2017,26(2):42-47,51.
[12]孙光林,陶志刚,宫伟力.边坡灾害监测预警物联网系统及工程应用[J].中国矿业大学学报,2017,46(2):285-291.
[13]张秀丽.地铁隧道施工实时监测系统及应用研究[D].沈阳:东北大学,2013.
[14]梅文胜,张正禄,郭际明.测量机器人变形监测系统软件研究[J].武汉大学学报(信息科学版),2002,27(2):165-171.
[15]王宇会,蒋利龙.GeoCOM对测量机器人的开发与应用[J].矿山测量,2009,4(2):56-57.
