低空无人机航测露天矿三维重构方法与试验
2018-04-08李长青曹明兰李亚东武胜林
李长青,曹明兰,李亚东,2,武胜林
(1. 北京工业职业技术学院,北京 100042; 2. 北京林业大学精准林业北京市重点实验室,北京 100083)
无人机(unmanned aerial vehicle)是自带飞行控制系统和导航定位系统的无人驾驶飞行器[1-2],具有灵活性高、云下飞行、影像分辨率高、时效性强、成本低等优点[3]。以无人机为平台的低空数字摄影测量广泛运用于灾害应急[4-5]、资源环境监测[6]、基层测绘[7-9]等领域。随着通信技术的发展,无人机机型及传感器的性能也得到不断提高,使得无人机影像快速三维建模成为可能[10-11]。露天矿三维重构的DSM数据展示方式具有形象、直观、准确、多维度、信息丰富等特点,有利于管理者对矿区整体空间布局的快速把握,有助于改进采矿工作者对地质数据的理解,能够有效提高对矿区布局信息的交流效率,有效提升决策指挥者的空间分析能力[12-14]。露天矿的DSM搭配二维DOM能够使露天矿废弃物分布现状调查、生态环境影响调查、作业部署指挥等工作事半功倍。因此,研究基于无人机航测技术进行露天矿三维地质建模技术具有重要的现实意义和实用价值[15-16]。本文将利用测图鹰X100搭载SONY a7R数码相机对阳光露天矿进行低空航空摄影,以OpenCV计算机视觉库为基础,运用VC++二次开发,借助SBA平差库对所采集的少量控制点进行光束法平差,再用PMVS算法生成密集点云,建立露天矿三维地质模型DSM和正射影像图DOM,并检查成果精度。
1 数据采集
1.1 设备参数
本文采用测图鹰X100航测遥感无人机系统,机长60 cm,翼展100 cm,起飞重量2 kg,巡航速度75 km/h,起飞方式弹射架弹射起飞,配备GPS/INS自主巡航系统、地面站控制系统及空地通讯数据链组件,搭载了SONY a7R数码相机,通过检校机构检校参数见表1。
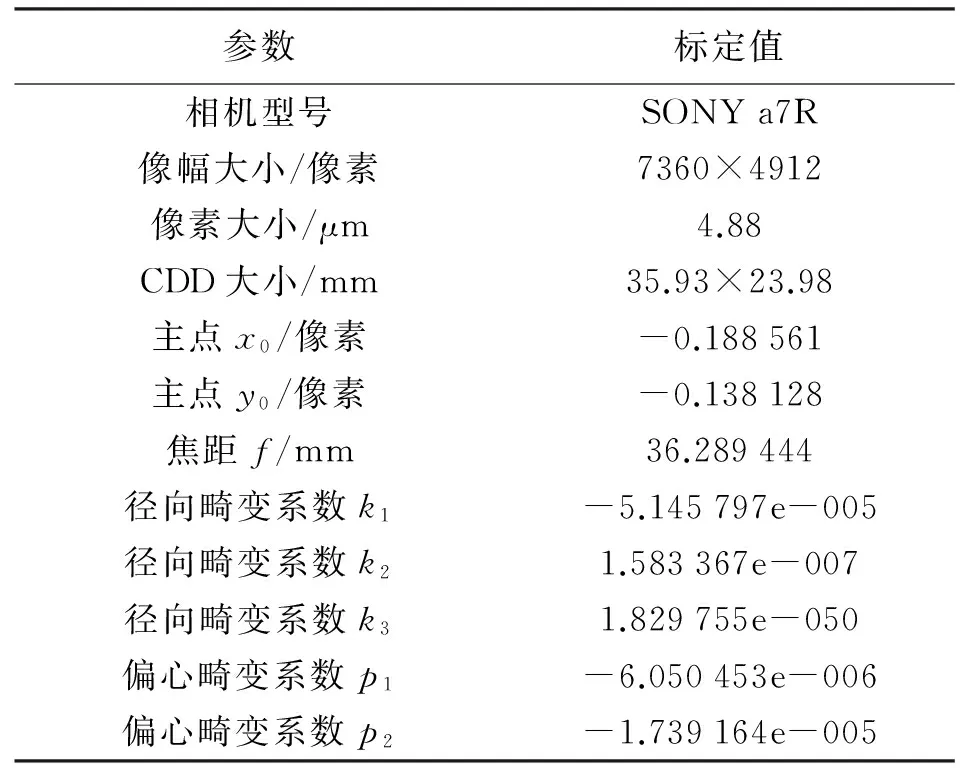
表1 相机型号及标定参数
1.2 航摄设计
无人机航飞前检查测区基准面情况,确保起飞和降落区域内没有障碍物,并确定起降点。设计航向85%,旁向重叠度65%。航飞当天天气状况良好,风力小于2级。完成飞行任务后,导出影像和飞行记录数据。所拍摄的航片影像清晰、色调饱和不偏色、层次适中、目视效果良好。
1.3 控制点的布设与采集
控制点的采集设备采用的是GPS RTK,外业飞行完成后,用笔记本电脑配合程序现场进行控制点匹配,再从正确匹配的同名点中人工选取现场可识别的点作为控制点。控制点采取点组布设可以增加平面高程的精度,而且四周均匀布设控制点,4点布设平高控制点均有利于保证测区内部的精度[17]。因此控制点的布设采用了点组状布设形式,尽量使其分布均匀,使靠近测区边缘处控制点的密度大于测区中心区域。
2 数据处理
2.1 理论基础
通过无人机航测外业采集到航摄影像和控制点等数据后,内业数据处理的主要流程如图1所示。数据处理时,首先通过图像特征匹配技术得到多张影像中的同名匹配点,再利用控制点和匹配点通过平差计算出精确的相机姿态。有了精确的相机外方位元素后再通过摄影机姿态及匹配点间的几何约束关系得到密集三维点云,进而得到三维模型。其中,数据处理的关键与核心在于获取精确的相机姿态和密集点云生成。
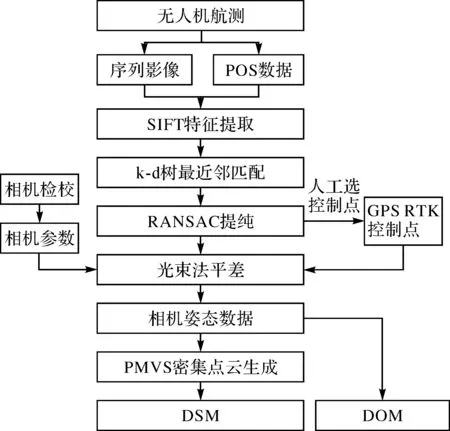
图1 技术路线
2.1.1相机姿态获取与平差
平差是基于共线方程模型,将像点在像平面的坐标观测值(未知数非线性函数)线性化后,按照最小二乘法原理计算出一个近似解,在此基础上逐一迭代,以达到趋于最佳值。以一张像片作为平差计算基本单元,在像片上量测控制点的像点坐标后进行区域网概算,以确定区域中各像片的外方位元素及加密点坐标的近似值,再根据共线条件,按控制点和加密点分别列误差方程,进行区域内统一平差计算,解算出各像片的外方位元素和加密点的地面坐标。

图2 拍照时相机位置与像片姿态
设S为摄影中心,在世界坐标系下的坐标为(XS,YS,ZS),M为空间一点,在世界坐标系下的坐标为(X,Y,Z),m为M在影像上的构象,其像平面和像空间辅助坐标分别为(x,y,-f),(Xm,Ym,Zm),此时可知S、m、M三点共线,可得
(1)
根据像平面坐标和像空间辅助坐标系之间的关系可得共线方程式为
(2)
式中,x0、y0、f为像平面中心点的坐标和摄像机主距,是影像的内方位元素。
共线方程式按一次项展开得
(3)
式中,Fx0、Fy0为共线方程函数的近似值;dXS、dYS、dZS、dφ、dω、dκ为外方位元素的改正值;dX、dY、dZ为待定点的坐标改正值。
根据式(3)列误差方程,可用矩阵形式为
(4)
可简写成
V=AX+Bt-L
(5)
引入权,列出加密点的误差方程并权赋1,列出控制点的误差方程并列出虚拟误差方程式,权赋P;按∑PVV最小建立的法方程为
(6)
根据式(6)可求解外方位元素改正值和点的坐标改正值。
2.1.2密集点云生成
本文密集点云的获取采用了PMVS算法。PMVS是一种基于多视匹配的重建算法。它的基本思路是首先在所有图像上提取Harris和DOG(difference of Gaussian)特征点;然后利用特征匹配、重建,得到种子点;最后用种子点向周围扩散得到稠密的空间有向点云或面片[18]。
对于已知相机姿态的影像集合Im={Ii|i=1,2,…,n},将每幅影像Ii划分成β×β大小的图像块Mi(x,y),其中x、y分别为图像块Mi对应块的行和列索引。引入面片(patch),它为一个一边平行于参考相机x轴的近似正切重建物体表面的小矩形,记作p。PMVS算法最终目标为尽量保证每幅图像的每个图像块内都能重建出空间面片。
设参考图像R(p),在R(p)中p是可见的。针对p有扩展矩形,p在R(p)中的投影是μ×μ大小的,本文取μ=5。
2.2 方法与实现
建立露天矿三维模型时,必须对无人机影像进行正射纠正,获得正射影像图DOM。本文借助C++和OpenCV配合少量地面控制点,对无人机影像进行光束平差处理,解算出相机姿态数据。并用PMVS算法生成密集点云,再创建多边形网格(polygonal mash)模型,重构出线、面、体、空间等各类数据,展现目标的形态特性。通过导入地面控制点生成高精度的带有真实坐标的三维模型,生成数字表面模型DSM和数字正射影像图DOM。
3 试验结果与精度评价
采用测图鹰X100搭载SONY a7R数码相机拍摄的464张照片,借助C++和OpenCV配合少量地面控制点光束平差的内业数据处理,对露天矿进行三维重构试验,其中生成密集点云,并生成数字表面模型DSM和数字正射影像图DOM,可以全方位灵活清晰地展示出露天矿的空间信息。
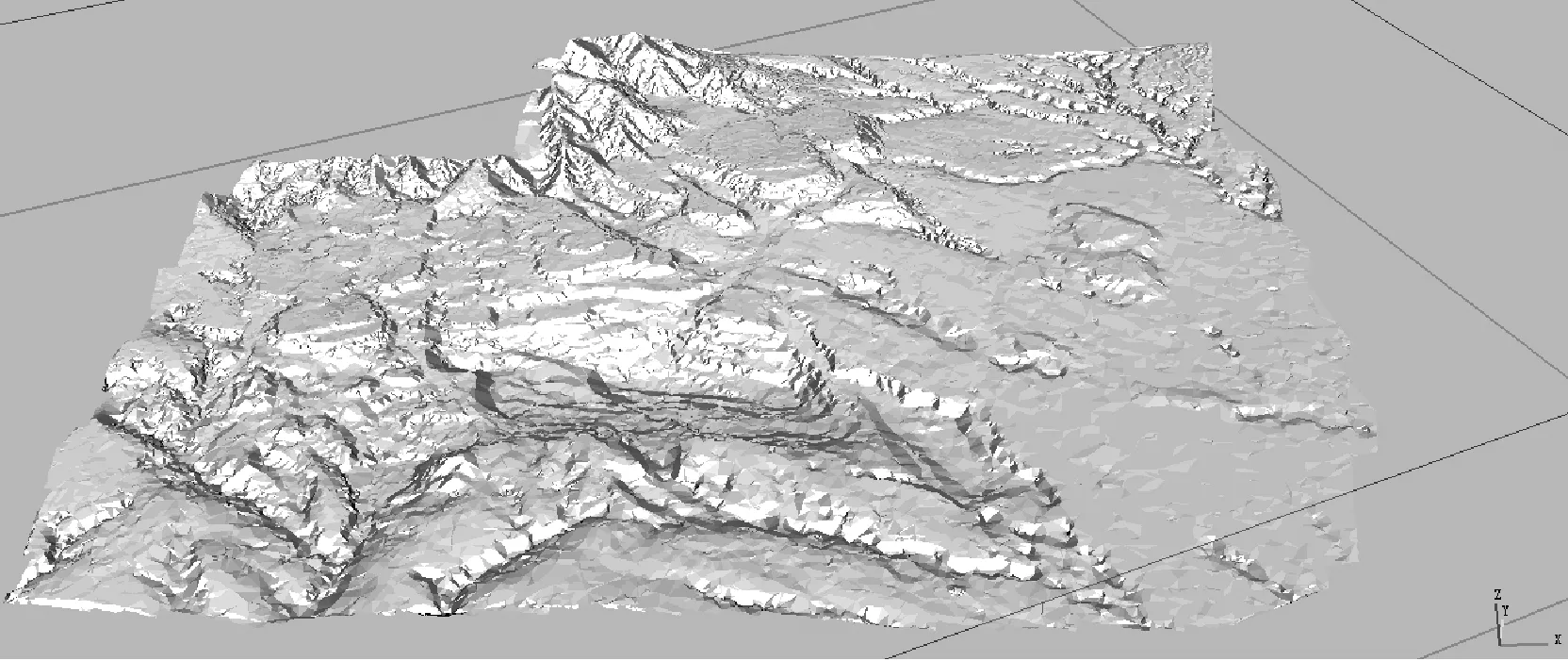
图3 露天矿三维表面模型DSM
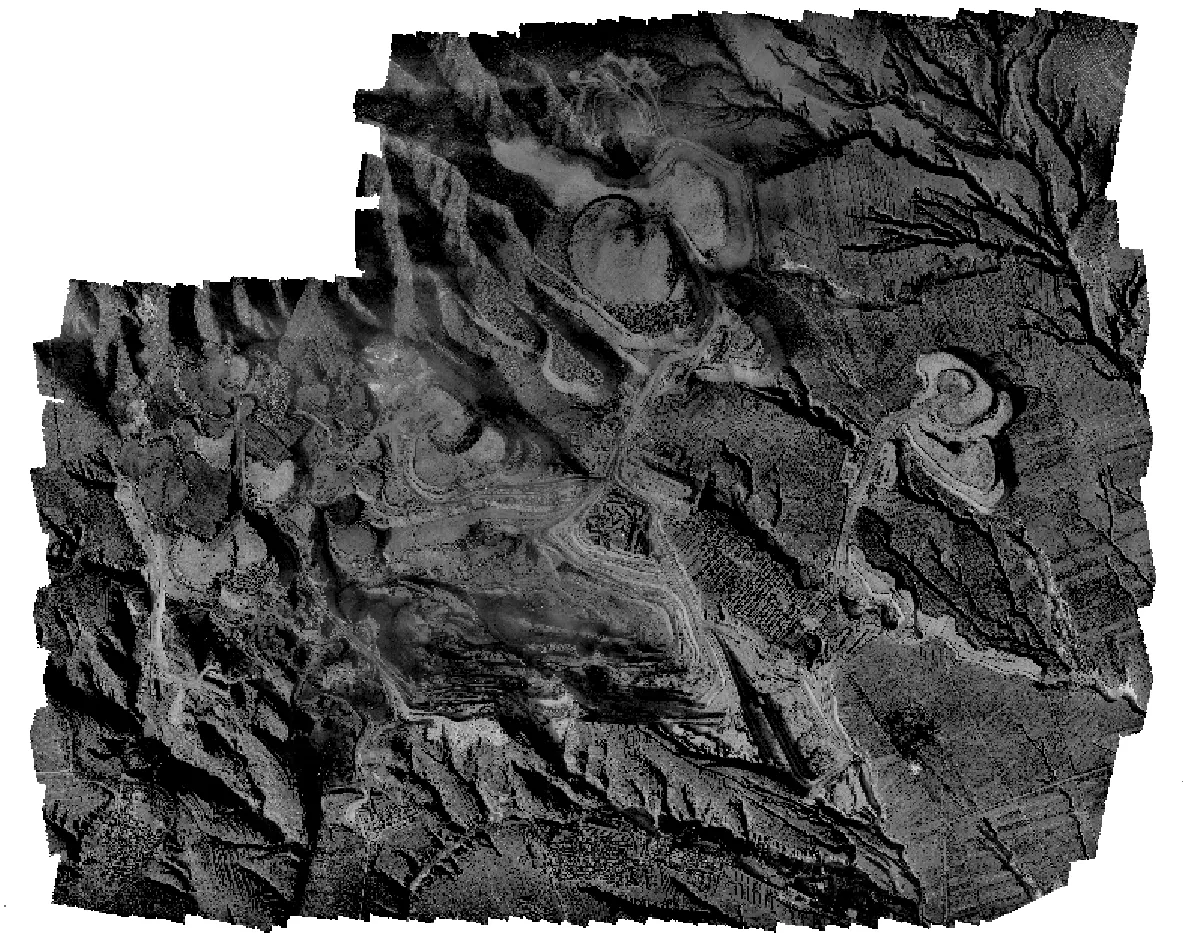
图4 露天矿正射影像图DOM
精度评定时,从所制作的DSM和DOM上分别抽取并现地实测明显地物点,基于矿区的控制网利用RTK采集平面和高程数据,将DSM和DOM上所测得坐标进行比对分析。结果表明,成图平面中误差Mxy=0.113 m,高程中误差Mz=0.121 m,邻近地物点间距中误差Md=0.151 m,均满足1∶500地形图国家标准的精度要求。
4 结果与讨论
对于环境复杂的露天矿采场和存在滑坡隐患的危险区域,利用传统的测绘手段获取其空间三维信息均存在一定困难。本文提出了一种采用无人机搭载相机进行数据采集,借助C++和OpenCV配合少量地面控制点进行光束法平差,并用PMVS算法生成密集点云的低成本快速高效露天矿三维重构方法。
试验采用测图鹰X100搭载SONY a7R数码相机对阳光露天矿进行低空航拍,以OpenCV计算机视觉库为基础,运用VC++进行二次开发,对所采集的少量控制点进行光束法平差,再用PMVS算法生成密集点云,建立了露天矿三维表面模型DSM和正射影像图DOM。结果表明,成图平面中误差Mxy=0.113 m,高程中误差Mz=0.121 m,邻近地物点间距中误差Md=0.151 m,均满足1∶500地形图国家标准的精度要求。该方法实现了利用低成本非量测相机自动生成高分辨率的露天矿三维模型建立,可满足存在安全隐患的危险区域三级建模研究与矿石生产管理应用。
参考文献:
[1] WATTS A C,AMBROSIA V G,HINKLEY E A.Unmanned Aircraft Systems in Remote Sensing and Scientific Research:Classification and Considerations of Use[J].Remote Sensing,2012,4(6):1671-1692.
[2] 李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,39(5):505-513.
[3] 杨柳,陈延辉,岳德鹏,等.无人机遥感影像的城市绿地信息提取[J].测绘科学,2017,42(2):59-64.
[4] 侯恩科,首召贵,徐友宁,等.无人机遥感技术在采煤地面塌陷监测中的应用[J].煤田地质与勘探,2017,45(6):102-110.
[5] 谢涛,刘锐,胡秋红,等.无人机大气环境应急监测系统设计探讨[J].环境科学与技术,2013,36(S1):289-293.
[6] 吕立蕾,张卫兵,胡树林,等.低空无人机航摄系统在长距离输油(气)管道1∶2000带状地形图测绘中的应用研究[J].测绘通报,2013(4):42-45,55.
[7] 曹明兰,张力小,王强.无人机遥感影像中行道树信息快速提取.中南林业科技大学学报,2016,36(10):89-93.
[8] 薛永安,王晓丽,张明媚.无人机航摄系统快速测绘矿区大比例尺地形图[J].测绘地理信息,2013,38(2):46-48.
[9] 何海清.低空摄影测量航带重构及数据处理方法研究[J].测绘学报,2014,43(4):440.
[10]谭仁春,李鹏鹏,文琳,等.无人机倾斜摄影的城市三维建模方法优化[J].测绘通报,2016(11):39-42.
[11]于丙辰,陈刚,段淼然,等.无人机遥感在大型不可移动文物三维重建中的应用[J].测绘通报,2017(5):43-46.
[12]王植,刘善军,徐白山,等.无人机影像序列中露天矿三维建模[C]∥第十七届中国环境遥感应用技术论坛论文集.北京:[s.n.],2013:68-74.
[13]刘红旗,项鑫,李军杰.三维激光扫描原理及其在露天矿测量中的应用[J].科技资讯,2009(3):7-8.
[14]王海龙.低空摄影测量技术在露天矿山土石方剥离工程量计算方面的应用探索[J].测绘通报,2014(S2):170-172.
[15]刘军,王鹤,李峰,等.露天矿边坡影像三维重建技术[J].金属矿山,2015,V44(4):259-261.
[16]孙前芳,刘光伟,赵浩.三维可视化建模技术在露天矿中的应用[J].采矿技术,2010,10(6):76-78.
[17]朱进,丁亚洲,陈攀杰,等.控制点布设对无人机影像空三精度的影响[J].测绘科学,2016,41(5):116-120.
[18]FURUKAWA Y,PONCE J.Accurate,Dense,and Robust Multiview Stereopsis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(8):1362-1376.
