多源遥感数据在道路勘测中的应用
2018-04-08高文明
高文明
(北京市勘察设计研究院有限公司,北京 100038)
对穿越地形复杂,基本没有道路可以通行,植被茂密、通视条件差、山坡陡峭的大面积测区进行地形图测量,常规工程地形图测量方法具有受通视条件影响大、外业工作强度大、采集的地貌特征点密度不够或采集点不均匀、地形起伏很难精确表示等缺点,因此在该类测区采用全站仪采集数据获取地形图的方法已无优势。现阶段随着航空摄影测量、机载激光雷达(以下简称机载LiDAR)、卫星遥感等技术应用相对成熟,可以综合利用多源测量数据技术各自优势,为道路工程勘测提供高精度测量基础数据。
为提高数据精度和测量效率,本文介绍了一种采用机载LiDAR主动测量技术,结合高分遥感影像的多源数据融合的技术方法,为工程勘测提供一种新的技术选择。
1 机载LiDAR技术
机载LiDAR技术是一种将激光技术、高动态载体姿态测定技术和高精度动态GPS差分定位技术相融合的技术,具有采集密度高、数据精度高、植被穿透能力强、不受阴影和太阳高度角影响等特点[1-4]。
机载激光雷达测量系统的主要组成部分为:动态差分GNSS接收机,用于确定激光雷达信号发射参考点的空间位置;姿态测量装置(一般为惯性导航系统或多天线陈列GNSS系统),用于测定扫描装置的主光轴姿态参数;激光扫描仪,用于测定激光雷达信号发射参考点到地面激光脚点间的距离[5-6]。机载LiDAR测量作业原理如图1所示,机载LiDAR测量激光采集方式如图2所示,机载LiDAR技术的作业流程[7-8]如图3所示。
机载LiDAR系统主要优势和用途之一就是利用采集的点云数据快速制作高精度数字高程模型(DEM),平原、丘陵地区的高程中误差可达0.14 m,山地地区的高程中误差可达0.41 m[9],满足1∶1000地形图的精度要求[10-11]。缺点是与航空影像提取地物特征点的能力相比,利用机载LiDAR点云数据进行自动识别地物和提取特征点的准确度相对较低。
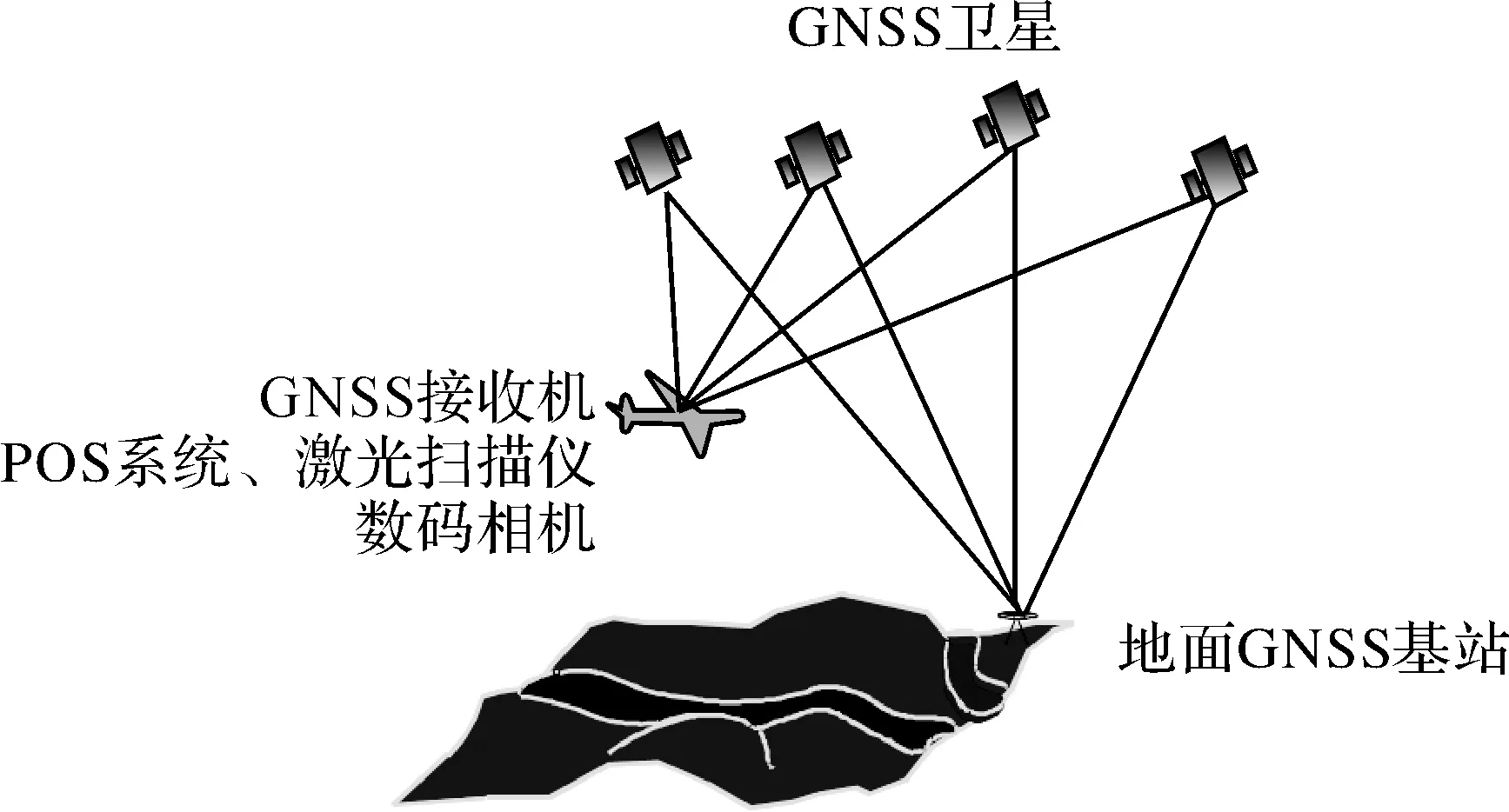
图1 机载LiDAR测量作业原理
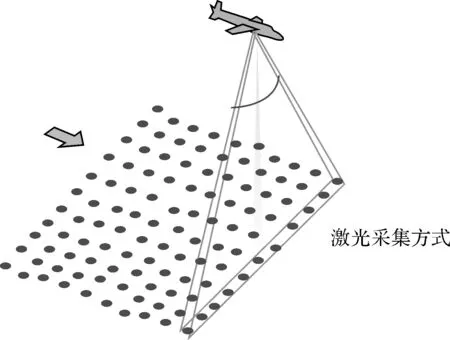
图2 机载LiDAR测量激光采集方式
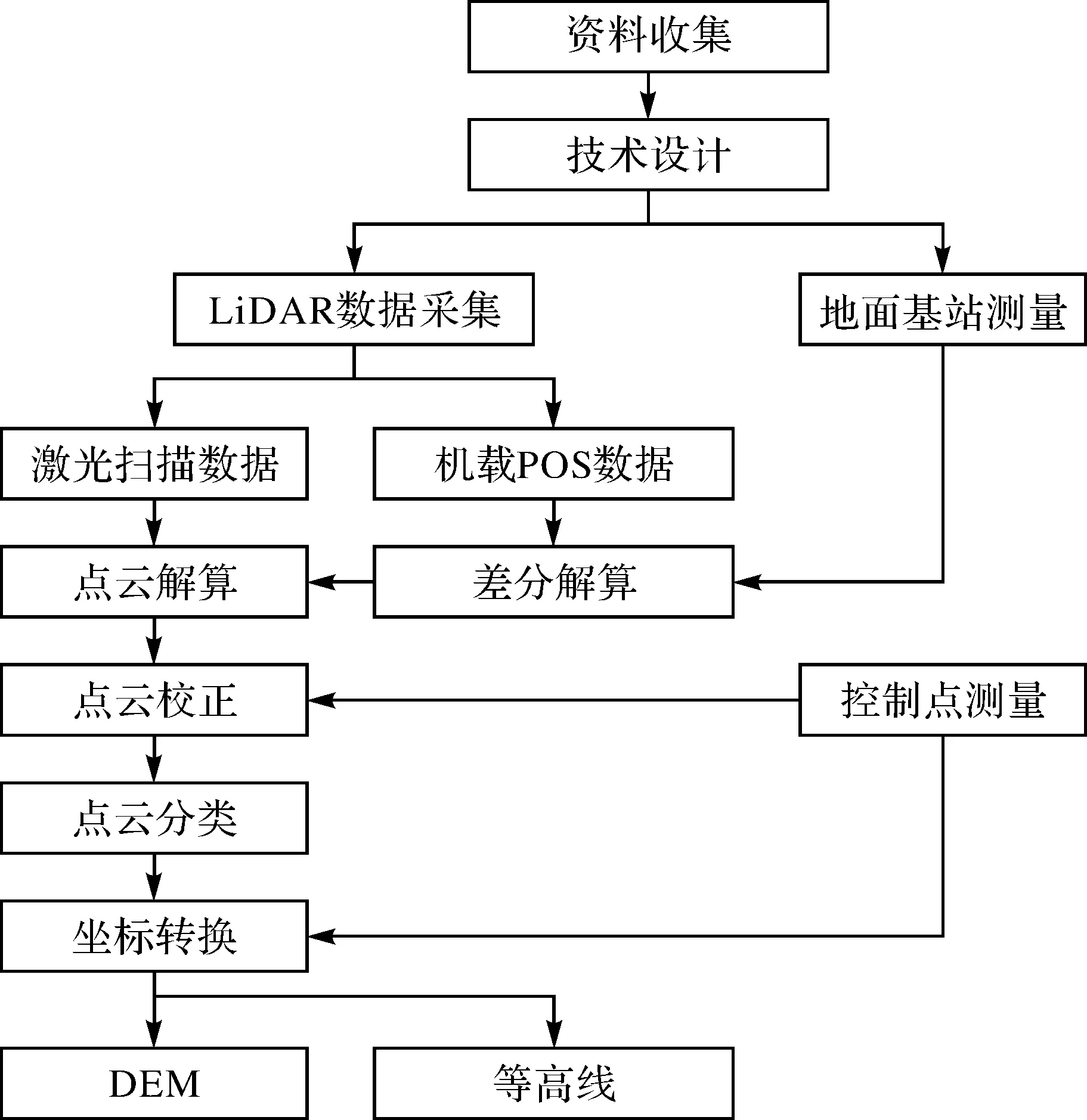
图3 机载LiDAR技术作业流程
2 卫星遥感技术
基于遥感影像的测量方法是利用遥感影像获取高精度地物数据和DEM数据,具有被动式取光成像、地物影像识别率高、生产周期短、不受地形情况限制等优点[12-13]。因此,自20世纪80年代初,我国陆续应用美国TM陆地卫星及法国SPOT等卫星图像,通过对卫星图像的判释,查明线路经过地区的工程地质和地形条件,为线路初选阶段的优化设计和技术决策提供科学依据。
随着遥感技术的不断发展,尤其是近几年卫星成像的空间几何分辨率逐步提高,目前最新一代商用遥感卫星分辨率已经达到0.31 m,通过高分辨率卫星影像可以准确解译出更详细的地物要素,为遥感数据在大比例尺地形高精度勘测中提供新的技术应用方向。
卫星影像生产流程[14-15]如图4所示。
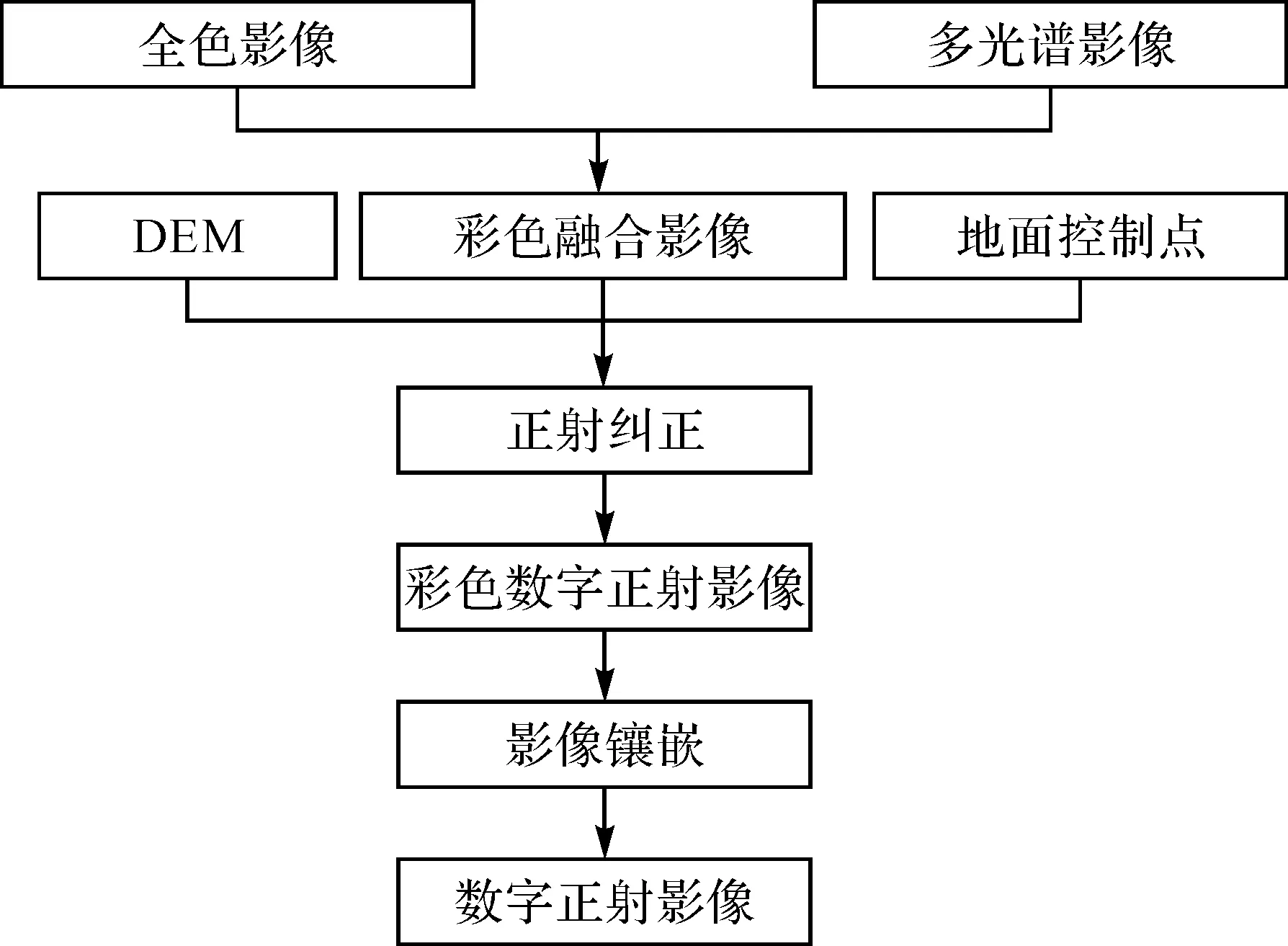
图4 卫星影像生产流程
该方法的缺点是在植被茂密、地面难以到达的区域,外业工作难度大,且很难采集到植被遮挡处的真实地面点数据,故高程精度一般难以满足大比例尺道路工程勘测的需求。
3 多源数据融合应用技术路线
机载LiDAR在高程信息获取中具有先天技术优势,并利用卫星影像进行辅助地物解译和平面定位。基于上述两种数据源提出以下生产工艺流程(如图5所示):
(1) 利用机载LiDAR技术获取点云数据。
(2) 对点云数据预处理解算、航带校正、滤波剔除非地面点后,提取地面点,制作DEM模型和等高线数据。
(3) 在卫星影像的基础上,利用激光点云数据和控制点进行影像定向和正射纠正,制作DOM数据。
(4) 利用DOM数据进行地物矢量采集,结合点云数据及外业调绘成果对地物要素进行判读。结合已制作的等高线数据,综合编辑制作DLG成果数据。
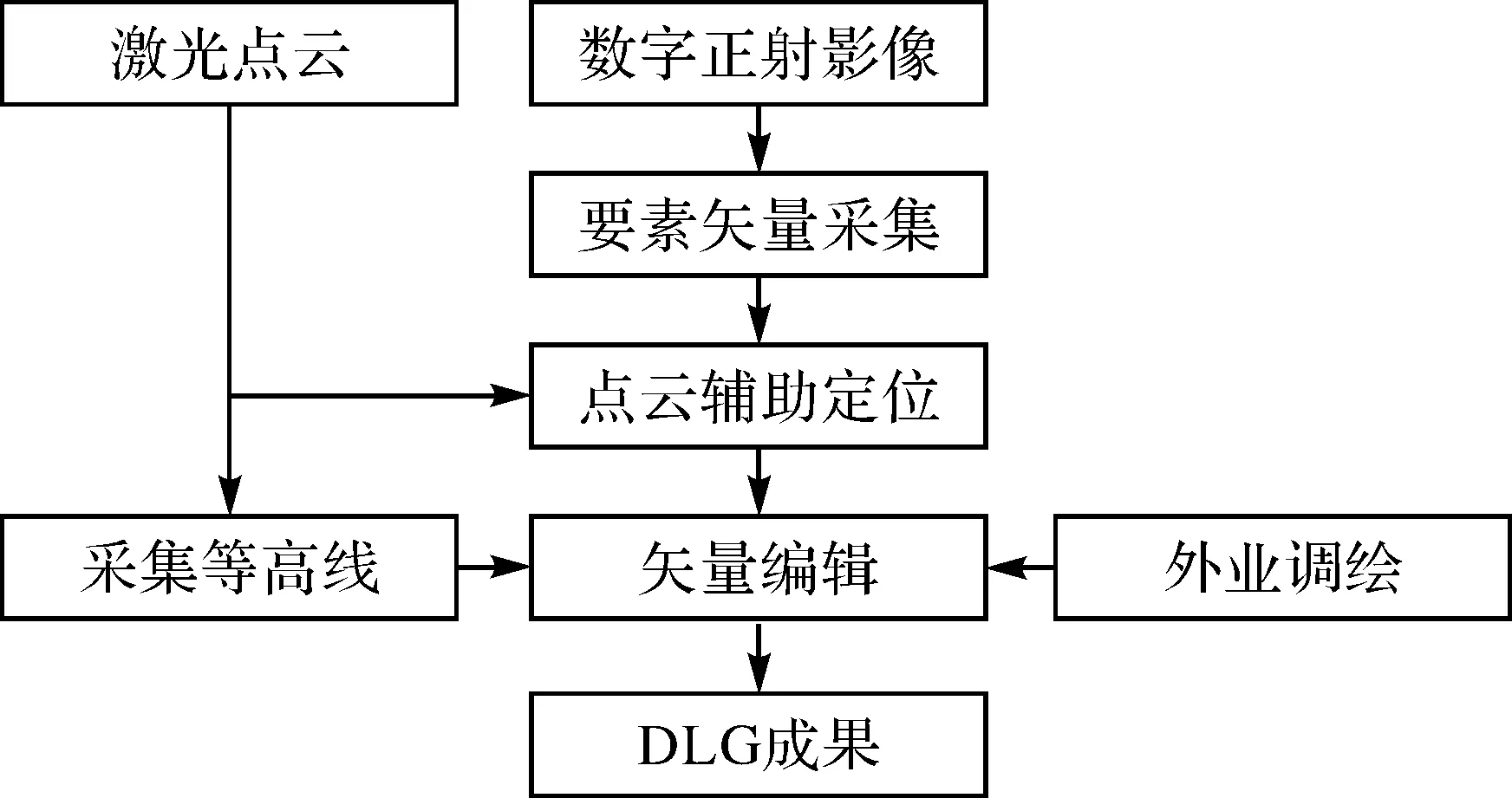
图5 多源遥感数据制作DLG成果
4 工程应用案例
本文以兴延路工程第2标段为例,介绍利用机载LiDAR技术与遥感技术相结合的方法进行内外业数据生产的过程。
4.1 工程概况
兴延路工程第2标段位于昌平区西北方向,属于规划兴延路最北边的一段,大致为南北走向,南起北京市昌平区北禾路千龙滩,北至延庆县康庄镇。地跨115°55′28″E—116°00′59″E、40°14′10″N—40°22′45″N之间,全线长19.8 km(如图6所示)。测区以陡峭山地为主,海拔最低处约358 m,最高处山头高约993 m,绝对高差635 m;且测区内多为悬崖峭壁、植被覆盖率非常高,交通不便,部分地区人迹罕至。
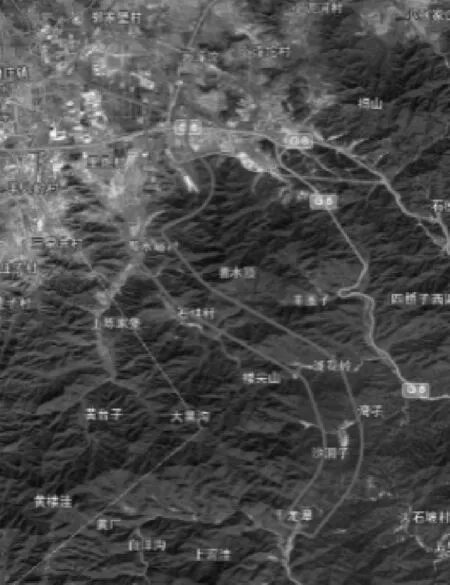
图6 兴延路工程第2标段工作范围示意图
该项目需要对线路中心线两边各500 m范围内进行地形测量,提供1∶2000地形图成果。
4.2 机载LiDAR作业与成图
由于工期紧张,项目在航飞设计时,只采集激光点云数据,不兼顾影像质量成果。这样可以大大避免太阳高度角、不利天气的影响,增加航摄时间窗口,短期内能快速获取有利数据成果。
该项目选用徕卡ALS70机载LiDAR系统进行航飞作业采集,航摄参数设置见表1,航飞线路如图7所示。
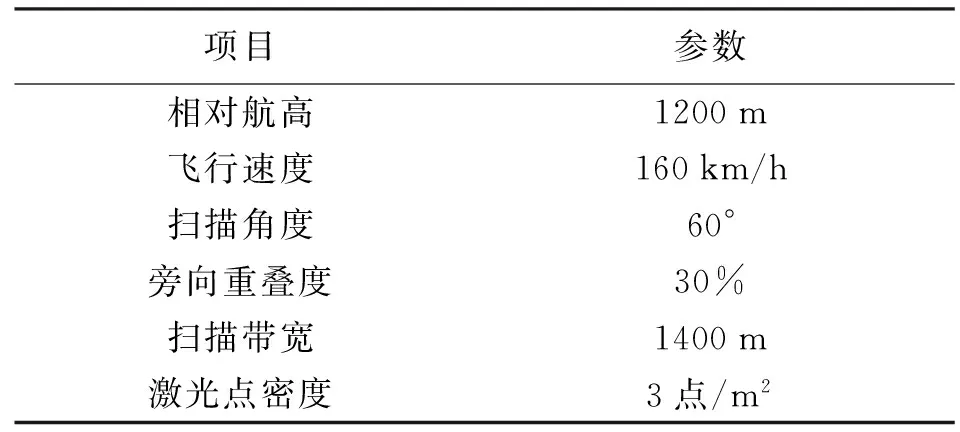
表1 机载LiDAR航摄参数

图7 航线设计
4.2.1基站与控制点测量
本项目采用了1个市级地面CORS站为地面基站,GPS采样间隔设置为1 s。
基于CORS站,采用了网络RTK作业方式,在测区共布设了26个像控点。点位的选取原则为:选取地面明显地物点,点位区域高程相对平坦,尽量选在旁向重叠中线附近,使控制点在相邻航线能共用。
4.2.2坐标系统转换
采用七参数模型,利用2套已知控制点坐标,将原始WGS-84坐标转换成所需平面坐标系统。结合大地水准精化成果将转换控制点大地高推算出对应的地方高程系,利用二次曲面拟合方式和2套坐标成果,将点云数据批量改正成地方高程。
4.2.3点云数据分类
利用TerraSolid软件实现不同航带点云数据的校正、分类滤波,剔除植被、构筑物等非地面点数据,得到真实地面点数据,并利用地面点制作数字高程模型(DEM),如图8所示。
4.3 遥感底图与DLG成果的制作
本文利用3景0.4 m WorldView影像,可以覆盖整个线路区域。
充分利用已有点云数据,并结合外业测量,在单景卫星影像四周和中间位置布设控制点,进行影像定向和纠正,制作数字正射影像图(DOM)成果。
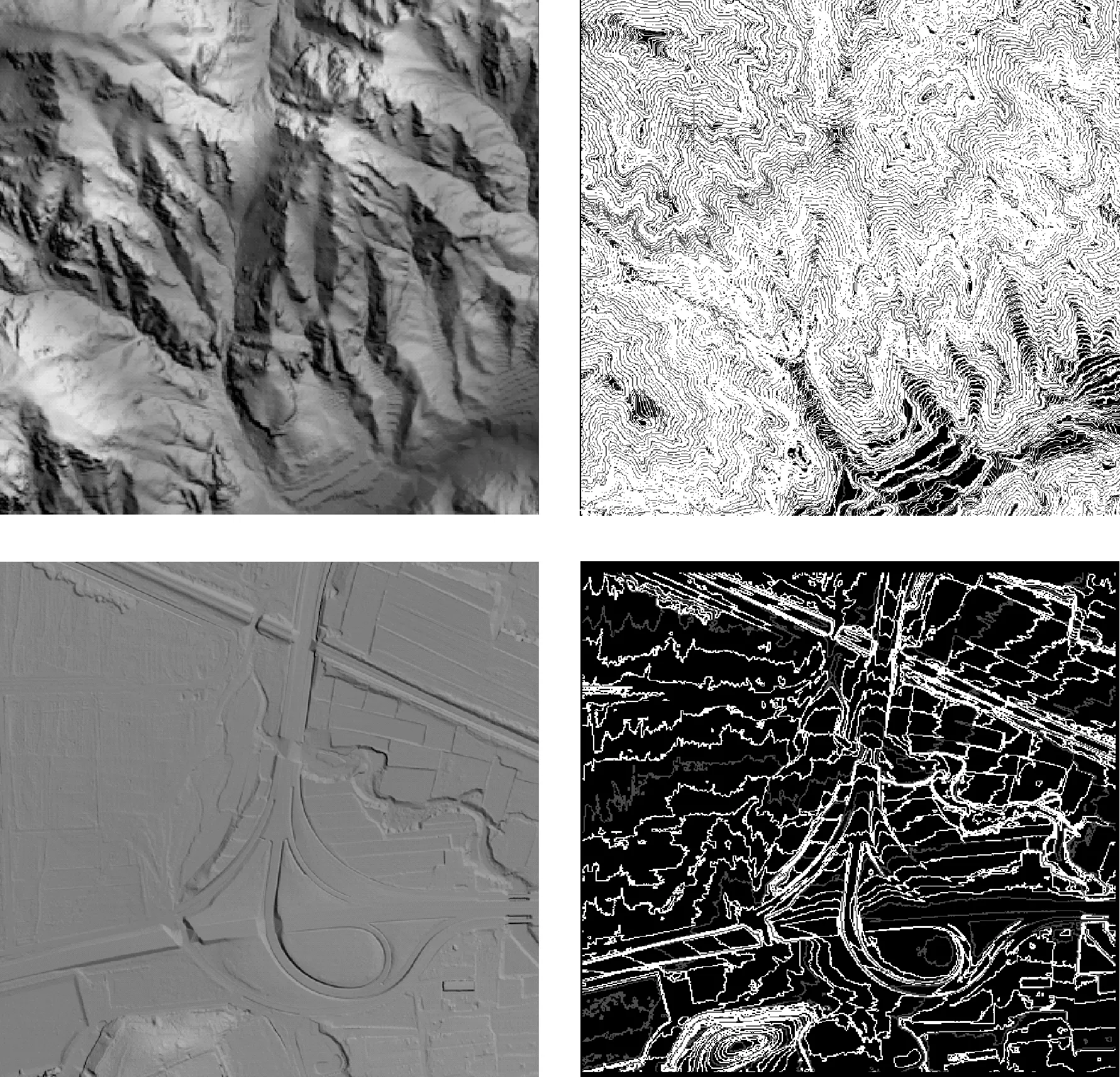
图8 基于地面点云数据制作的DEM和等高线成果
利用ArcGIS软件对影像进行内业矢量采集。首先,在DOM基础上描绘地物要素,以图幅为单位回放纸图;其次,进行野外调绘与补测,主要对漏测的地物进行补测,对新增地物进行采集,对被遮挡地物进行编辑;然后,根据外业调绘成果和内业采集数据,再对矢量数据进行编辑、处理;最后结合等高线数据形成DLG数据成果,如图9所示。
图9 DLG成果
4.4 成果形式和精度验证
利用机载LiDAR和遥感数据结合技术路线,本文除提供了项目规定的DLG成果以外,还提供了分类点云、DEM、DOM成果,如图10所示,大大提高了后续线路设计的质量和效率。
图10 DLG套合DOM成果
DLG成果质量检测采用点位检测的方法,分别利用全站仪和单基站RTK测量方式进行DLG的全野外检测。检测点的选取原则为在测区均匀分布、随机选取的明显地物点,1幅图至少选取检测点20个,检测点总数不少于100个。
全线共55幅图,共检测7个图幅共计334点,检测结果为:平地、丘陵地区平面中误差1.05 m、高程中误差0.23 m;山地区域平面中误差1.13 m、高程中误差0.52 m。详见表2、表3。

表2 平面中误差统计

表3 高程中误差统计
按照《1∶500 1∶1000 1∶2000地形图航空摄影测量内业规范》中对1∶2000地形图的平面位置中误差(见表4)、高程中误差(见表5)的要求,从检测结果来看,利用LiDAR技术与遥感卫星影像融合测制的1∶2000比例尺地形图数学精度能满足相关规范要求。

表4 1∶2000地形图的平面位置中误差 m

表5 1∶2000地形图的高程中误差 m
5 结 语
利用机载LiDAR、卫星影像等多源数据融合制作工程所需地形成果的方法,在本项目中具有较强的实用性,在成果质量和成果形式完全满足技术要求的同时,还大大缩短了工期,降低了外业工作强度,今后类似工程可以借鉴参考使用。
另外,随着今后低空飞行平台的不断成熟,小型化激光扫描仪、数码相机、倾斜摄影等多样化的数据采集方式不断涌现,大大降低航空数据采集和应用门槛。同时,大量国产商用卫星技术指标也逐步提高,不同空间分辨率的可用遥感卫星逐步增多。因此,今后多源空间数据获取技术相互融合、借鉴及创新应用是未来几年新的发展趋势。传统工程测量将从单一依靠外业实测,发展成不同观测手段相结合的综合应用领域,利用多源多尺度数据优势,大大降低外业工作强度,提高效率。
参考文献:
[1] 王继承.机载激光雷达技术和摄影测量匹配技术在DEM生产中的应用[J].测绘与空间地理信息,2015,38(5):128-130.
[2] 刘光庆,杜勰.浅谈基于LiDAR数据与常规航空摄影测量制作3D产品的流程区别和优势[J].低碳世界,2014(21):181-183.
[3] 黄励鑫,王丽园.机载激光雷达技术在困难复杂地区公路勘察设计中的应用[J].交通科技,2009(1):59-61.
[4] 黄克城,宋时文,阎凤霞.机载LiDAR技术在地形图测绘中的应用[J].地理空间信息,2016,14(4):99-101.
[5] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[6] 陈璞然.机载激光雷达(LiDAR)测量技术在公路勘测设计中的应用[J].黑龙江科技信息,2016(2):124-125.
[7] 赵云昌,丁莹莹,李通.机载LiDAR技术在高速公路勘测中的应用[J].测绘与空间地理信息,2014,37(10):199-200.
[8] 李勇,黄金浪.利用LiDAR数据测制城市大比例尺地形图的研究与实践[J].城市勘测,2010(2):94-95.
[9] 熊登亮,柯尊杰,陈舫益,等.机载LiDAR技术在测制城市1∶1000地形图中的应用[J].勘察科学技术,2015(1):44-46.
[10]胡耀锋,张志媛,林鸿.利用机载LiDAR测绘大比例尺数字地形图的可行性研究[J].测绘通报,2015(5):87-90.
[11]王炜.利用机载LiDAR测绘大比例尺数字地形图的精度分析[J].测绘通报,2012(6):34-36.
[12]孙家抦.遥感原理与应用[M].武汉:武汉大学出版社,2003.
[13]刘美娟,谢金华,邱振戈,等.TerraSAR-X卫星影像中大比例尺测图应用研究[J].测绘科学,2015,40(9):143-148.
[14]陈春华,周军元,郑明灯,等.资源三号卫星影像在1∶1万DLG生产中的应用[J].测绘地理信息,2013,38(5):65-67.
[15]肖锋,李思杰.卫星遥感影像在1∶1万比例尺基础测绘中的应用[J].城市勘测,2010(6):82-84.
