多模态传感器系统在河槽边坡地貌测量中的应用
2018-04-08张家豪周丰年程和琴郑树伟石盛玉姜月华周权平
张家豪,周丰年,程和琴,郑树伟,石盛玉,姜月华,周权平
(1. 华东师范大学河口海岸学国家重点实验室,上海200062; 2. 长江水利委员会长江口水文水资源勘测局,上海200136; 3. 中国地质调查局南京地质调查中心,江苏 南京 210016)
河流边坡地貌特征和发展演变关乎航道安全和防汛安全,是地学领域的一个主要研究方向[1-4],其中边坡高精度地形数据的获取是研究河流边坡侵蚀和稳定性的基础。对河流险段边坡的稳定性及发展趋势的监测和评估迫切需要对其陆上和水下两部分地形进行结合研究和定量分析。但由于水陆地形测量仪器的测量方法和原理的差异,以及数据融合方法的困难,对河流边坡陆上、水下两部分地形数据的同时获取和结合研究的难度较大[5-6]。
传统的陆地和水下地形测量主要依靠GPS RTK和单波束回声测深仪等实现,测量效率及精度均较低。随着新型仪器的开发,一些学者利用以激光扫描系统和多波束测深系统为核心的多传感器系统对河流边坡一体化的测量与融合开展了相关研究。如Hackney[7]、Leyland[8]等对湄公河Kratie段边坡进行联合测量,前者指出近岸堆积体在崩岸后期加剧了边坡的侵蚀作用,后者利用泊松曲面重构算法对陆上和水下点云数据进行了融合研究并指出飓风对边坡侵蚀起到了加剧作用;陈科[9]、邓神宝[10]、赵春明[11]等尝试利用船载扫描系统分别对大坝水库河道、北江河段和长山水道进行了水陆地形一体化测量并进行了测量精度验证;但受制于多种仪器同步测量和数据融合方法,河流边坡陆上与水下连续地形的测量仍是国内外研究的难点[8],特别是洪季河流崩岸等强烈侵蚀岸段的测量工作较难开展,有关其高精度近岸边坡一体化地形的测量成果尚未见报道。
自长江三峡水库蓄水后,来沙量的减小使长江中下游河段边界条件发生改变,近岸深槽冲刷、坡比增大,岸滩不断崩退[12-15],对航运和防汛安全构成威胁,迫切需要对河流险段边坡进行地貌观测和定量计算分析。基于此,本文利用由Riegl VZ-4000三维激光扫描仪、SeaBat-7125多波束测深仪、GPS RTK、Trimble差分GPS等仪器组成多模态传感器系统,对长江下游铜陵段窝崩边坡和马鞍山段侵蚀型河漫滩边坡开展联合测量研究,建立水陆一体化三维地貌模型,全面揭示了洪季大流量影响下的窝崩和侵蚀河漫滩的各项地貌参数,实现了对地貌特征的定量分析,以期为长江流域航道建设和防汛减灾提供参考。
1 研究区域与研究方法
1.1 研究区域
研究区分别位于长江铜陵段太阳洲水道凹岸(如图1(a)所示)和马鞍山进口段左岸(如图1(b)所示)。前者属鹅头型分汊河型,干流长约59.9 km,进口段和出口段均为窄而深的顺直单一段,中间分布有成德洲、汀家洲、紫沙洲、铜陵沙等沙洲,平面形态极为复杂[16]。三峡水库蓄水以后,铜陵河段进入河势调整期,含沙量减小,主流贴岸冲刷,河道更趋于弯曲,且随着汀家洲和紫沙洲左汊分流比的减少,铜陵沙左侧主槽水流顶冲点上提,崩岸频发[17]。后者为长约3.5 km的顺直河段,地处东梁山与西梁山两大山矶卡口之间,同时又位于陈家洲和江心洲两大江心洲之间,是长江芜湖段与马鞍山段分界处的咽喉位置。受来水来沙变化、长江主流与陈家洲汊道汇流及东梁山挑流作用的影响,水动力轴线不断调整摆动,属于强崩岸地区[18-19],动力地貌环境较为复杂。左岸为典型的二元结构河漫滩,三峡水库运行以来,该河段主流向左岸逼近,对其造成大幅冲刷[20-21]。
1.2 测量方法
1.2.1陆上边坡测量
Riegl VZ-4000三维激光扫描系统、GPS RTK系统组成的陆上传感器系统可以采集毫米级精度的陆上三维地形数据(如图2所示)。三维激光扫描仪集成了激光测距系统、扫描系统、内部校正系统和CCD数字摄影,采用脉冲式窄红外激光束快速扫描机制[22],可实现高精度、快速非接触式的数据获取。工作时,扫描角度为水平360°和垂向±60°,预设频率50 kHz,预设解析度为水平方向0.03,竖直方向0.013,测量速率为37 000 meas/s,最大测距4000 m,精度和分辨率分别为15和10 mm,扫描时间为33 min左右。
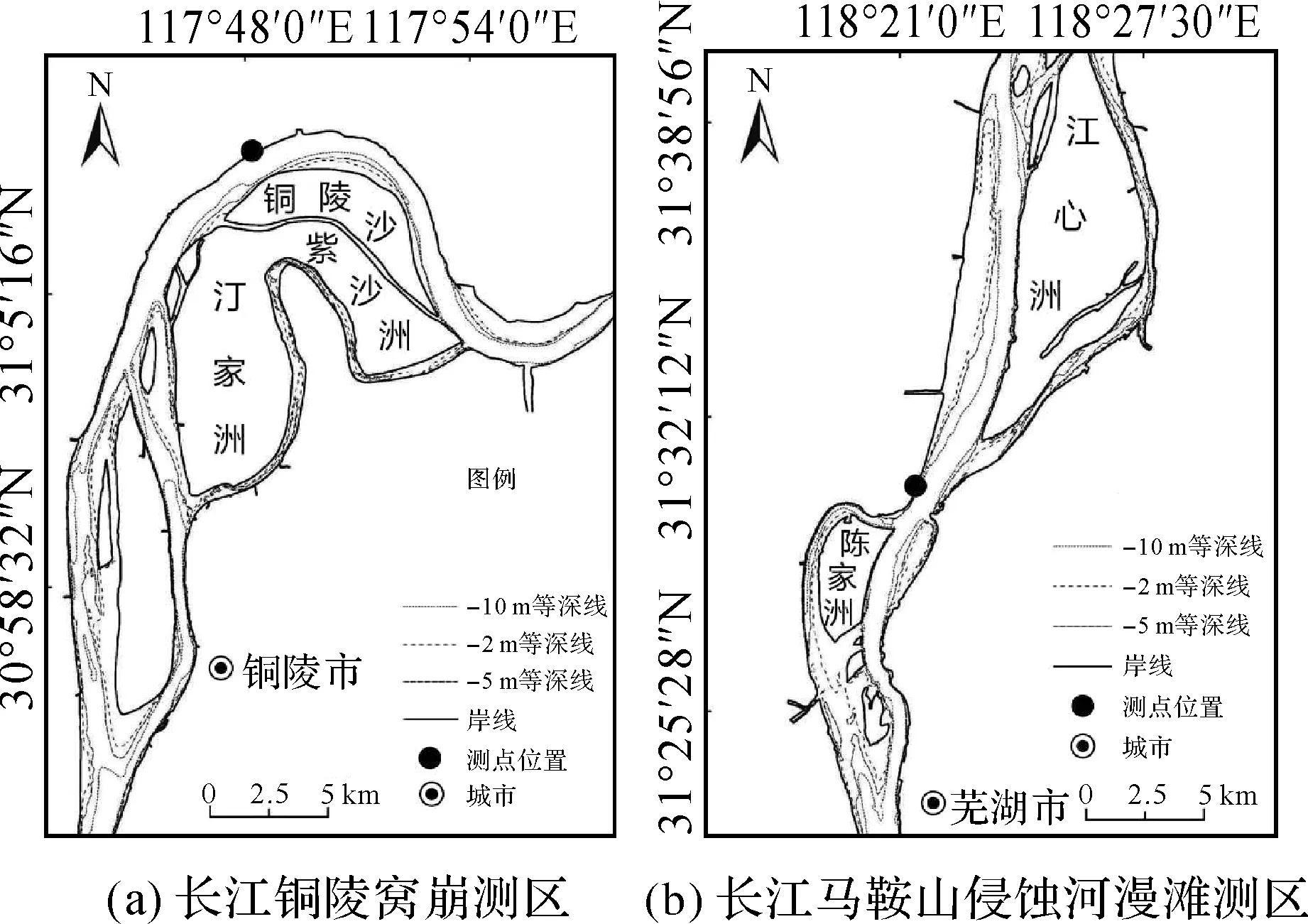
图1 研究区域
扫描完成后需要进行坐标校正。本次测量采用反射片校正法,扫描前将4个直径5 cm的圆形反射标靶架设在以激光扫描仪为圆心,半径50~70 m的范围内,仪器在扫描过程中会精确记录各个反射片中心的位置。扫描完成后将RTK流动站分别放至4个反射标靶及GPS控制点位置进行精确测定,获取其经纬度和高程信息,并与三维激光扫描仪坐标系进行坐标系统校正。
1.2.2水下边坡测量
SeaBat-7125多波束测深系统、Trimble差分GPS组成的船载传感器系统可以采集高精度的水下三维地形数据(如图2所示)。多波束测深系统配有POS MV(IMU)惯性导航设备,工作时利用换能器阵列发射宽扇区覆盖的声波,并通过接收换能器阵列对声波进行窄波束接收,实现水下地形的测量。该多波束作业频率为200 kHz/400 kHz(双频可选),在400 kHz的作业频率下,中央波束角为0.5°,发射波束宽为1°(±0.2°),最大频率为(50±1)Hz,共512个波束,测深分辨率可达6 mm。测量时频率采用400 kHz,Ping率设置为20 Hz。换能器用钢架置于测量船前方,可以有效减小行船水流带来的干扰,船速控制在2.5 m/s以下,可以保证格网分辨率达到0.3 m。差分GPS则为船载测量设备提供定位支持。
1.3 数据处理方法
1.3.1激光扫描仪点云数据的处理
利用RiScan Pro对扫描仪数据LAS Dataset进行点云的预处理。首先将点云数据以ASCII格式进行提取,测量过程中产生的噪点和植被采用RiScan Pro提供的地形过滤器进行迭代滤除。此外,由于马鞍山河段采取双测站扫描方法,故需对两测站扫描数据进行拼接处理。测站的拼接以两测站的坐标系统SOCS1 (scanner own coordinate system)和SOCS2为基础,其原理是基于每个测站的点云数据生成大量的平面,通过对两测站公共区域内的共同平面进行数次迭代拟合,直至拟合精度达到所需标准,从而实现点云数据的高精度拼接。首先,从两站中选取4个对应的控制点进行点云数据的粗拼,然后对结果进行迭代拟合,进一步消除拼接误差。对马鞍山测站进行测站的拼接,共进行了4次迭代拟合,每次迭代调整容差系数,最小平面数为2377个,最终的拼接误差为0.004 6 m,两测站的融合结果令人满意(如图3所示)。

图2 由多波束、三维激光扫描仪、差分GPS和RTK组成的多模态传感器系统工作示意图
激光扫描仪获取的海量点云数据虽然能够精准地“复刻”地形,但是庞大的数据量也对数据处理造成了较大困难,其中包括了很多的冗余信息,对计算效率也会造成影响。因此,对数据的简化处理十分必要。基于此,本研究设置了x、y、z、方向抽稀距离,对点云数据进行了抽稀操作。
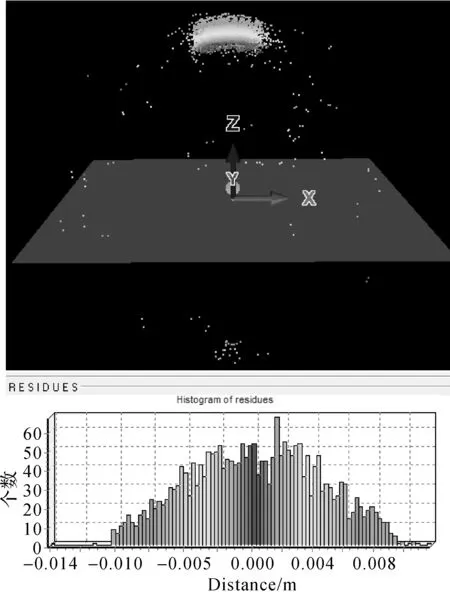
图3 马鞍山测点两测站拼接结果及误差
1.3.2多波束点云数据的处理
多波束测深系统在采集数据时进行了姿态校正、水位校正、吃水改正和声速改正。对校正后的数据利用PDS2000软件进行异常波束的剔除及噪点的粗差滤除,生成格网化的点云数据。
1.3.3激光扫描数据与多波束数据的融合
本次测量水陆测量统一采用WGS-84坐标系统和高斯3°带投影,高程系统为WGS-84椭球高。将处理后的激光扫描仪LAS点云数据与多波束S7K点云数据统一转换为ASCII编码格式并导入RiScan Pro中转换为LAS数据,实现地形的初步融合。随后导入ArcGIS平台创建LAS Dataset数据集,实现大量点云数据的快速读取,并构建Terrain数据集对数据进行进一步的细化,在构建过程中,选择合适的Terrain金字塔类型,设置合理的金字塔等级。一般有z容差金字塔和窗口大小金字塔两种,通过比较分析选用z容差金字塔,该金字塔过滤器速度较慢,但对地表激光扫描数据的处理及对垂向精度的控制效果较好。
对生成的数据集通过不同插值方法(克里金法、反距离权重法、自然邻域法、线性插值三角网法、趋势面法等)进行插值比较,最终选择精度较高、边界约束较好的反距离权重法(IDW)插值生成栅格数据集。该插值方法主要依赖于反距离的幂值,幂参数可基于距输出点的距离来控制已知点对内插值的影响,随着幂数的增大,内插值将逐渐接近最近采样点的值,插值表面会变得详细而不平滑,指定较小的幂值将对距离较远的周围点产生更大的影响,从而导致平面更加平滑,其中栅格大小设置为10 cm。对生成的栅格数据进行三次阴影叠加渲染处理,获得铜陵段和马鞍山段的高精度陆上水下一体化边坡地形、TIN、坡度、高程等值线和断面图。
1.4 误差来源分析
陆上测量误差的主要来源为坐标校正[23],由于校正用的反射片坐标信息由RTK测得,故存在观测误差。采用RTK技术测量的平面和垂直坐标精度能够控制在2 cm以内[22],因此对于反射标靶控制范围内的点云坐标精度是能够保证的。本次测量利用3个点进行匹配和确定坐标系并利用第4个点进行验证,结果显示匹配结果的标准偏差为0.011和0.017 m。
2 地形测量及融合结果
2.1 窝崩边坡水陆一体化地貌模型
地貌测量结果显示(如图4(a)所示),该边坡为
典型窝崩地貌,其形似“耳”状,发育有一大一小两个窝崩坑,通过定量计算得出,该崩岸崩口长约102.7 m,最宽处约37.1 m,窝崩坑水下部分投影面积2 059.9 m2,表面积3 206.6 m2,崩塌土方体积15 245.8 m3。受2016年洪水影响,陆上边坡发育有三阶冲刷陡坎(如图4(b)所示),坡比为0.09~0.25(如图4(c)所示),第一阶紧贴水边线,高约1.21~1.37 m,宽约1.4 m;第二阶高约0.55~2.01 m,宽约8 m;第三阶阶地上覆盖有高度为1.49~2.59 m的植被带。水下坍塌边坡坡比达到了0.33~0.55(如图4(c)所示),离岸100 m范围外河床冲深超过30 m,岸坡有向下部冲进之势。此外,在窝崩坑下游80 m处发育有长107 m、宽39 m的坍塌堆积体,岸边至堆积体之间的河床整体抬升。
地形剖面图(如图4(d)—(h)所示)显示,自Ⅰ断面至Ⅳ断面,边坡大部分呈内凹型,最陡处出现在Ⅲ断面。前人根据历史实测资料[4]和室内概化模型试验[24]指出,长江中下游稳定坡比取值范围为0.23~0.45,可判断该窝崩坡度介于崩塌坡度和稳定坡度之间,属于不稳定阶段。此外,其东向水下堆积体的发育使得近岸形成缓流区,将近岸河床表面抬升了5 m左右,阻止了窝崩向东继续坍塌扩展,但西北向圆形冲刷陡坎的形成和水下副窝崩坑的发育揭示了窝崩正在向西北方向扩展的趋势。
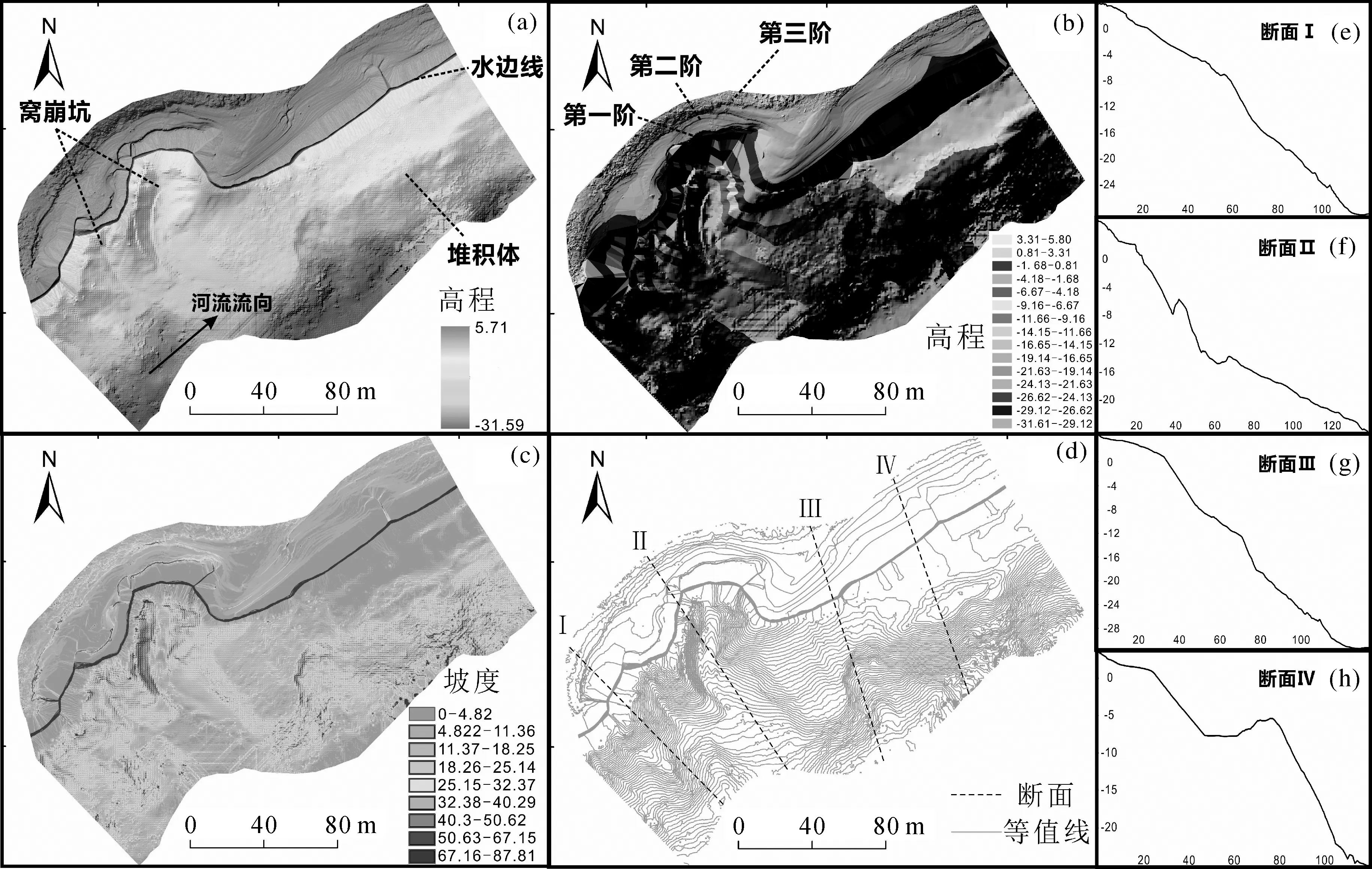
图4 (a)基于反距离权重法的陆上水下地形数据融合图 (b)TIN模型 (c)坡度模型 (d)高程等值线图 (e-h)窝崩区域典型断面图
2.2 侵蚀型河漫滩边坡水陆一体化地貌模型
地貌测量结果显示(如图5(a)所示),该边坡为典型侵蚀型河漫滩地貌。受2016年洪水影响,该区域冲刷严重,河滩出现多层崩塌陡坎,自河漫滩至江边呈三层阶梯型分布,平均坡比0.087,第一阶宽18.5~30.2 m,厚1.6~3.6 m,其上覆盖的植被受冲刷根茎裸露在地表之上;第二阶宽2.4~16.8 m,厚0.7~2.0 m;第三阶宽25.3~38.6 m,厚1.4~1.8 m(如图5(b)所示)。水下边坡受水流侵蚀坡比增大至0.22~0.88,在离岸3 m左右的位置发育有长69.2 m、宽44.6 m、深19.2 m的椭圆形冲刷坑(如图5(a)所示),其边缘坡度均超过40°(如图5(c)所示)。
地形剖面图(如图5(d)—(h)所示)显示,该河段陆上边坡整体坡度较缓,水下边坡坡度骤然变陡,最陡处出现在椭圆形冲刷坑内,自Ⅰ断面至Ⅳ断面,边坡由外凸型结构转变为内凹型结构。该岸段坡脚受水流的冲蚀呈现高地不均的起伏形态,由于近岸受到持续冲刷发育有多处大小不均的冲刷坑,冲刷坑的发育使得近岸地形呈不连续性,地形的不连续性会改变周边流场结构,使水流对边坡的侵蚀加剧,严重时可能使水流在地形不连续处入契形成回流,不停旋转的回流涡体会对边坡形成环形淘刷,增加对坡脚的扰动和剪切,加速土体的破碎和输移,进而产生崩岸,因此大型冲刷坑的存在使得局部边坡失稳坍塌的风险增大。
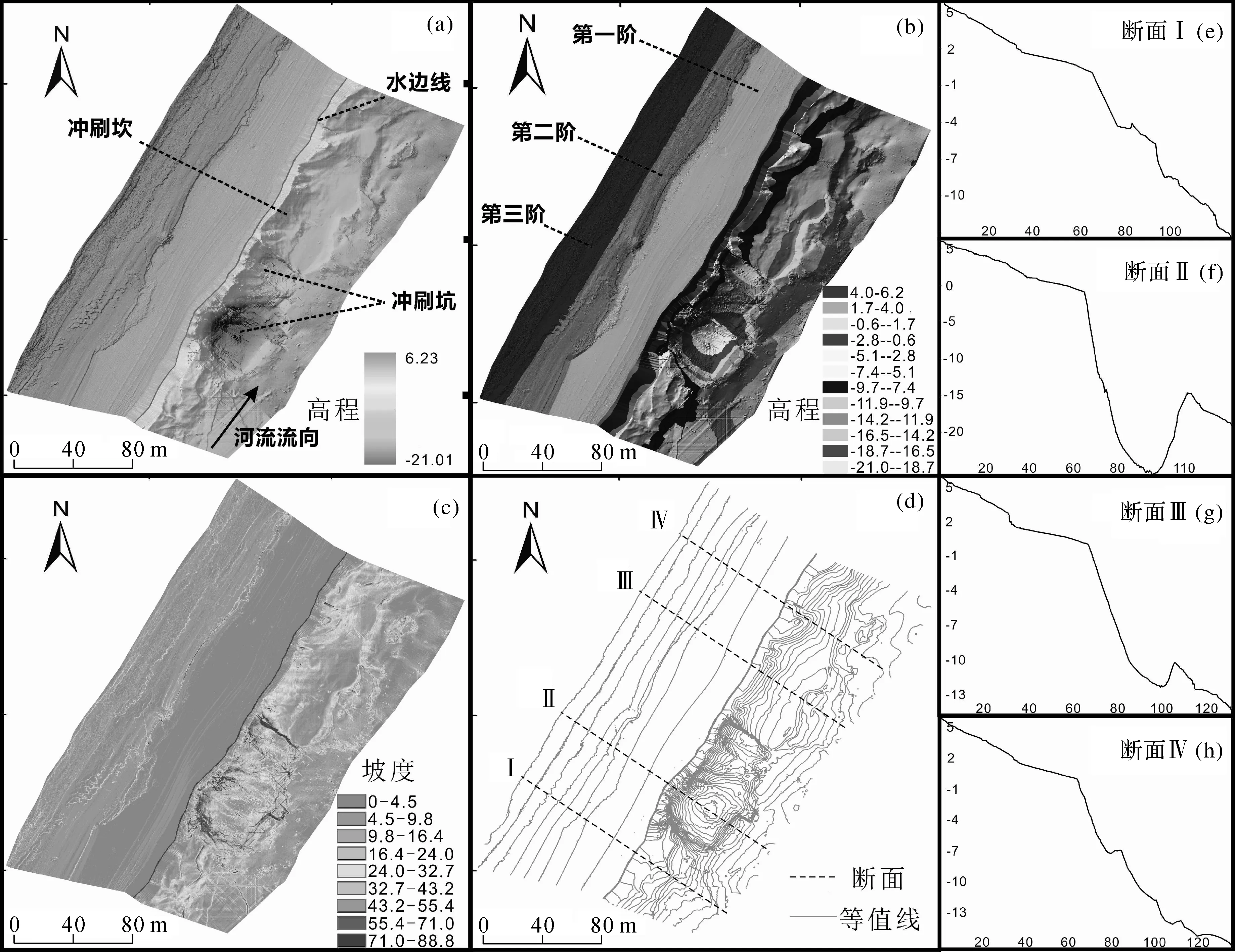
图5 (a)基于反距离权重插值法的马鞍山河漫滩边坡陆上水下地形融合图 (b)TIN模型 (c)坡度模型 (d)高程等值线图 (e-h)窝崩区域典型断面图
3 结 语
长江流域河槽边坡的地形观测及稳定性评估,对长江经济带防汛安全及工程建设具有重要意义。本文利用三维激光扫描仪、多波束测深系统、RTK、差分GPS系统等先进仪器,对长江下游铜陵段太阳洲水道凹岸边坡、马鞍山段侵蚀型河漫滩进行联合测量,实现了河流险段的高精度一体化地形的获取,揭示了窝崩、侵蚀河漫滩在洪季时期的完整地貌特征,初步评估了其稳定性和发展趋势。
本文的非接触测量方法和数据融合手段克服了传统测量方式的不易实施性和危险性,测量精度与测量效率均较高。利用此方法获得的陆上水下一体化地形数据可以构建大空间尺度的河流边坡地面高程模型,结合不同时期的实测数据,可以达到对重点岸段或航道工程的监测和评估。除此之外,实测的一体化断面数据还可以加入数理模型中进行边坡的稳定性和侵蚀量定量计算,应用前景较好。
一言以蔽之,课程整合即旨在通过学校教学时空的重新分配,引导学校思考存在的价值和育人模式,重新组织教育要素,调整教学秩序;引导教师重新思考学科本质、跨学科的必要性和多路径选择,引导学生穿跨学科壁垒,联通直接知识与间接知识,关联知识与生活,彰显学习的实践性与创新性,过与以往不同的学校生活。
参考文献:
[1] OSMAN A M,THORNE C R.Riverbank Stability Analysis.I: Theory[J].Journal of Hydraulic Engineering,1988,114(2):134-150.
[2] 党祥.二元结构河岸崩塌机理试验研究[D].武汉:长江科学院,2012.
[3] SIMON A,COLLISON A J C.Quantifying the Mechanical and Hydrologic Effects of Riparian Vegetation on Streambank Stability[J].Earth Surface Processes & Landforms,2002,27(5):527-546.
[4] 唐金武,邓金运,由星莹,等.长江中下游河道崩岸预测方法[J].四川大学学报工程科学版,2012,44(1):75-81.
[5] 边志刚,王冬.船载水上水下一体化综合测量系统技术与应用[J].港工技术,2017(1):109-112.
[6] 张则飞,蒋婵娟.水上水下一体化测量设备应用分析[J].山西建筑,2015,41(25):210-211.
[7] HACKNEY C,BEST J,LEYLAND J,et al.Modulation of Outer Bank Erosion by Slump Blocks: Disentangling the Protective and Destructive Role of Failed Material on the Three-dimensional Flow Structures [J].Geophysical Research Letters,2015,42(24):10663-10670.
[8] LEYLAND J,HACKNEY C R,DARBY S E,et al.Extreme Flood-driven Fluvial Bank Erosion and Sediment Loads: Direct Process Measurements Using Integrated Mobile Laser Scanning (MLS) and Hydro-acoustic Techniques [J].Earth Surface Processes & Landforms,2017,42 (2):334-346.
[9] 陈科,王冲,闻平,等.利用多传感器集成和数据融合实现水上水下一体化测绘[J].测绘通报,2017(3):76-79.
[10]邓神宝,沈清华,王小刚.船载激光三维扫描系统构建与应用[J].人民珠江,2016,37(10):23-26.
[11]赵春明,叶作安,谢志茹,等.水上水下一体化测量技术探讨[J].中国水运月刊,2016,16(9):287-290.
[12]唐金武,由星莹,李义天,等.三峡水库蓄水对长江中下游航道影响分析[J].水力发电学报,2014,33(1):102-107.
[13]高清洋,李旺生,杨阳,等.长江中下游河道崩岸研究现状及展望[J].水运工程,2016(8):99-105.
[14]姚仕明,何广水,卢金友.三峡工程蓄水运用以来长江中游干流河道河岸稳定性初步研究[C]∥湖北省水利学会.“三峡工程建成后对长江中游的影响”专题论坛——2007中国科协年会分论坛之十论文集.武汉:湖北省水利学会,2007:36-42.
[15]黎礼刚.长江中下游干流河道崩岸统计及存在的问题[J].水利水电快报,2007,28(2):11-12.
[16]司国良,於邦生,徐文法.安徽省境内长江重点河段整治浅议[J].人民长江,2002,33(4):25-27.
[17]冯源,王敏,廖小永,等.三峡水库蓄水后铜陵河段演变特点及趋势分析[J].人民长江,2012,43(5):89-92.
[18]管丽萍.长江马鞍山河段江心洲左右汊河道演变分析[J].江淮水利科技,2010(4):24-26.
[19]李长安,杨则东,鹿献章,等.长江皖江段岸崩特征、形成机理及治理对策[J].第四纪研究,2008,28(4):578-583.
[20]刘东风.三峡工程蓄水以来安徽长江河势变化及崩岸情况[J].江淮水利科技,2010(5):13-15.
[21]唐金武,由星莹,侯卫国,等.长江下游马鞍山河段演变趋势分析[J].泥沙研究,2015(1):30-35.
[22]钱伟伟.基于三维激光扫描系统的崇明东滩潮滩地形测量研究[D].上海:华东师范大学,2016.
[23]谢卫明,何青,章可奇,等.三维激光扫描系统在潮滩地貌研究中的应用[J].泥沙研究,2015(1):1-6.
[24]张幸农,应强,陈长英,等.江河崩岸的概化模拟试验研究[J].水利学报,2009,40(3):263-267.
