高潜水位矿区采煤沉陷地DEM的无人机构建方法
2018-04-08田帅帅赵艳玲李亚龙张建勇笪宏志
田帅帅,赵艳玲,李亚龙,肖 武,张建勇,笪宏志
(中国矿业大学(北京)土地复垦与生态重建研究所,北京 100083)
煤炭的大量开采虽然促进了我国的经济发展,但也产生了一些负面影响,其中煤炭开采造成的采煤沉陷地对耕地的破坏最为严重[1]。为了掌握采煤沉陷地损毁情况,或进行土地复垦工作,地形图是基础,因为复垦区域的挖填方量及配套设施的规划设计最主要的依据就是采煤沉陷地的实际地形数据[2]。传统的方法是利用全站仪或RTK测量碎部点,然后插值生成数字高程模型(DEM)。此方法需要大量的人力、物力与财力。近年来,无人机技术在各个行业的发展日趋成熟[3-6],越来越多的学者开始考虑用无人机来获取DEM[7-10],然而无人机航拍实际直接生成的是数字表面模型(DSM),在地表植被稀疏的情况下可以近似认为是DEM,当地表覆盖密度较大时则DEM构建难度很大。
高潜水位煤矿区采煤沉陷地易积水,植被茂盛,无人机技术难以快速构建高精度DEM。因此本文提出了一种基于地形特征的断面法点云滤波方法,经高程改正模型修正获取采煤沉陷地DEM,并以山东省某矿采煤沉陷地为例,实现了采煤沉陷地地形数据更精确的快速获取。
1 高潜水位煤矿区采煤沉陷地特征
采煤沉陷地是由于井工开采造成的采空区上方岩石在重力、应力作用下产生冒落,使地表的土地发生下沉形成的。随着地下煤层工作面的开采,地表开始出现相应的下沉:当工作面推进的距离达到启动距时,地表开始出现下沉;随着工作面的继续推进,地表出现下沉的面积逐渐扩大,地表下沉最大值也逐渐增大,直到开采达到充分采动,最大下沉值不再增大;工作面开采完毕一段时间之后,便形成稳定的采煤沉陷地。地表下沉过程断面图如图1所示。
采煤沉陷地有两个特征:①如图1所示采煤沉陷地呈现出盆地状,从沉陷地边缘到沉陷地中心,地形坡度从平缓开始慢慢变大,然后再慢慢变为平缓,地形并不会出现陡然变化的现象,即地形一般呈连续变化[11],相对丘陵山区地形较为简单,降低了其地形获取的难度。②高潜水位的采煤沉陷地内部,极容易出现积水现象,图1中给出了积水线,积水线以下的区域会出现积水,在积水区域的周围极易生长密集的水生植被,如芦苇、蒲苇等覆盖在采煤沉陷地的地表,无人机航测时无法获取植被覆盖区的地面点,增加了无人机获取其地形的难度。
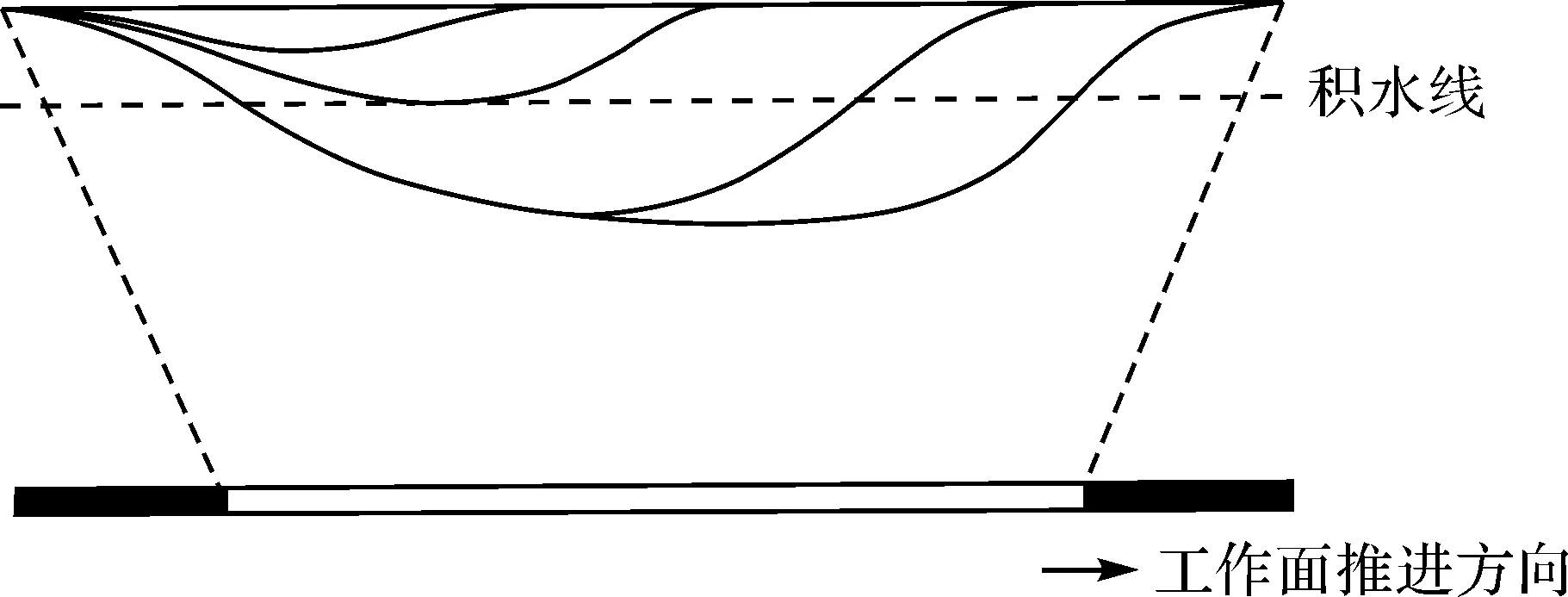
图1 地表下沉过程断面图
2 研究区概况及点云数据获取
本文研究区位于山东某矿区未复垦沉陷地,面积约1 km2,已形成稳沉,地形走势相对较为简单,呈盆地状,区域内地面点的高程值从盆地边缘到盆地中心呈逐渐降低的状态。地表除植被外无其他地物,植被类型较为单一,但植被覆盖密度大,植被以水生植被如芦苇、蒲苇为主。研究区概况如图2所示。

图2 沉陷地概况
外业工作主要包括实测点位数据和无人机航拍两部分。本次试验共采集8个控制点和263个碎部点,采用RTK测量。航拍采用大疆旋翼无人机,航高设置为100 m,航向和旁向重叠度分别设置为80%和60%,共获取有效影像479张。
内业数据处理时以8个控制点作为像控点进行影像矫正,采用Pix4dMapper软件进行拼接和空三加密并生成点云数据。
3 研究区DEM构建方法
3.1 基于断面法的点云滤波方法
针对不同情况,许多专家和学者提出了多种点云滤波的方法。Zhang等利用数学形态学中的一些开算子和一个闭算子,选择一个较小的窗口来对较低的噪声点进行过滤[8]。张小红通过采用一个局部移动的曲面对点云数据进行拟合,并且实现了点云的滤波[12]。隋立春等通过渐进三角网进行了点云滤波,该方法能有效过滤掉建筑物和低矮的植被,并且不破坏其他地形特征[13]。沈晶等在对点云提出粗差后,采用形态学重建法且结合多回波特性剔除冗余数据来实现滤波,该方法的适应性比较强[14]。卢遥等利用两期点云数据插值出的DEM作差值计算,得到地面的下沉量,然后通过设置面积阈值与高差阈值,采用高差分析法,提取了地表沉陷[15]。
大多数点云滤波的方法是针对形状规则的建筑物和少数植被的情况提出的,然而采煤塌陷地地表覆盖的芦苇等植被非常密集、面积相对较大、形状不规则,而且植被覆盖区的点云数据中几乎不存在地面点,一般的点云滤波方法对其点云的过滤效果并不理想。
本文依据采煤沉陷地的地形特点,提出了断面法点云滤波的方法,其基本原理如图3所示。
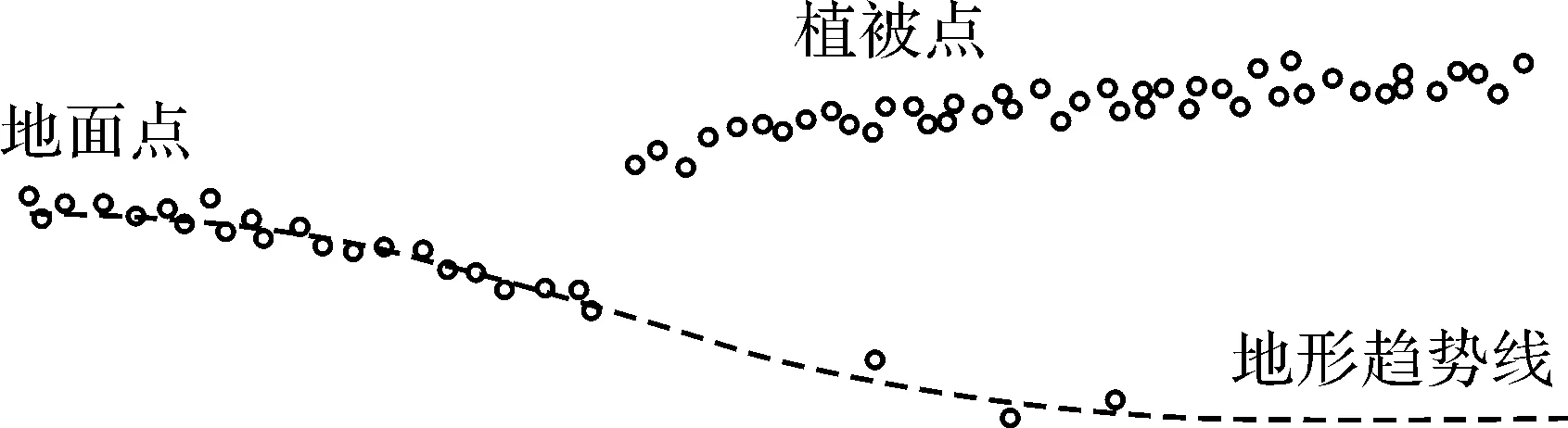
图3 断面法点云滤波原理示意图
首先,利用软件提取出某一区域的点云断面,然后依据采煤沉陷地边缘未覆盖植被的地面点和植被覆盖区域部分漏下来的地面点及采煤沉陷地的地形特征,画出该采煤沉陷地某断面的地形趋势线。最后依据地形趋势线,将没有附属在该线上的点都归类为非地面点,则剩下的点都归类为地面点。
相对于经典的点云滤波方法,该方法省去了高差阈值等参数的选取步骤,更加方便快捷。
3.2 DEM的修正方法
通过断面法点云滤波从原始点云中提出地面点点云数据,采用克里金插值法进行差值就可以得到研究区修正前的DEM。但是,对于大多数高潜水位采煤沉陷地而言,当沉陷地周边植被已经生长多年时,地面会有枯叶堆积,通过断面法获取的地面点点云可能为枯叶层表面的点云,并不是真正的地面点点云,因此,需要利用控制点高程数据进行修正。具体的做法分为以下3步:
首先,在外业测得的263个碎部点中选取63个分布较为均匀的点,以其高程值作为真值,计算与研究区修正前DEM相应的63个位置点的高程差;然后,用63个高程差值生成DEM改正模型;最后,用研究区修正前的DEM减去DEM改正模型,即可得到研究区修正后DEM。研究区修正前后的DEM如图4和图5所示。

图5 研究区修正后DEM示意图
3.3 精度验证
为了检验研究区修正前后DEM的精度,采用外业工作时采集的263个点中剩余的200个点作为检验点进行精度验证。以碎部点高程值为真值,分别提取研究区修正前后DEM相应点位高程值,计算误差并进行统计,结果见表1。
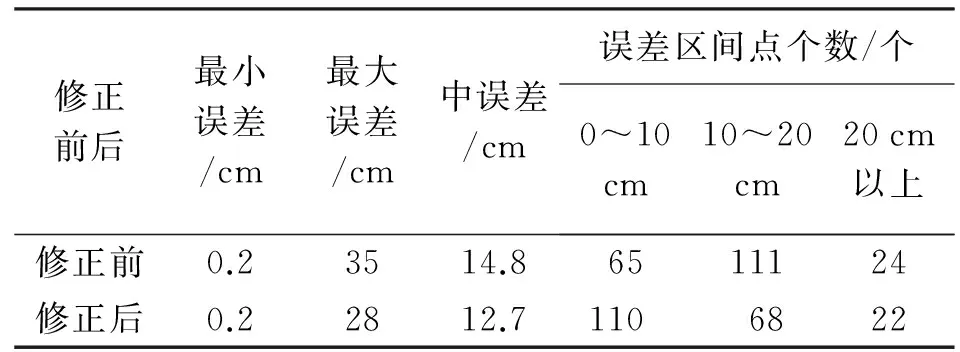
表1 精度统计
由表1可得,修正前后最小误差变化不大,为0.2 cm,最大误差降低了7 cm,中误差从14.8 cm降低到12.7 cm,精度得到了明显提高。从误差分布的区间来看,修正前200个点中有65个误差在0~10 cm之间,占比32.5%;111个点误差在10~20 cm之间,占比55.5%;24个点误差在20 cm以上,占比12%。可见修正前的误差绝大部分分布在0~20 cm之间,占88%,其中大部分分布在10~20 cm区间内。修正后200个点中误差在0~10 cm之间的有110个,占比55%;误差在10~20 cm之间的有68个,占34%;误差大于20 cm的有22个,占11%。通过分析可得,修正后绝大多数点的误差位于0~20 cm,占总数的89%,其中大部分位于0~10 cm之间,相比于修正前虽然误差在20 cm以内的点数相差不大,但是误差在10 cm以内的点明显增加,精度明显改善。
为了更直观地反映出修正前后精度的变化,本文将修正前后200个检验点的误差绘制折线图,如图6所示。
从图6可以直观地看出,改正前后各点误差几乎全部在30 cm之内,利用高程修正模型改正航测DEM后,大多数点的精度都有所上升。由此可见,断面法点云滤波后用高程修正模型对DEM加以改正,得到的地形数据是具有较高精度的,本实例精度可达到1∶500比例尺地形图要求,与传统测绘手段相比,时间效率提高2倍。
4 结 论
本文针对高潜水位采煤沉陷地的特征和无人机数据点云的特点,提出了一种基于断面滤波和DEM修正的高潜水位采煤沉陷地DEM快速获取方法,并且进行了精度评价,得出以下结论:
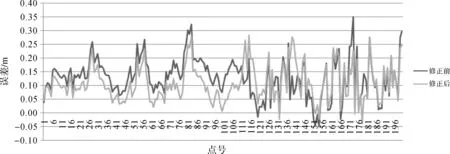
图6 修正前后误差图
(1) 高潜水位采煤沉陷地地形具有其独特特点,地形走势相对简单,坡度变化较缓呈盆地状,而且表面多附有大面积芦苇、蒲苇等水生植被。
(2) 针对采煤沉陷地特殊地形,提出了一种基于地形地势的人工滤波方法即断面法点云滤波,得到最接近原始地形的点云数据。
(3) 针对地面枯叶堆积的情况,提出利用少量实测点构造改正模型,对生成的DEM进行改正得到研究区修正后的DEM,与修正前的DEM相比,修正后精度得到明显提高。
本文方法具有高效率、高精度、成本低、节省劳动力等诸多优点,为采煤沉陷土地的损毁诊断、土地复垦规划设计等提供了地形数据支持。
参考文献:
[1] 李亚龙,赵艳玲,陈慧玲,等.基于格网法表土剥离时空顺序确定[J].中国矿业,2016,25(10):97-100.
[2] 赵艳玲,胡振琪,高永光,等.ERDAS IMAGINE在采煤沉陷地复垦土方量计算中的应用[J].矿业研究与开发,2005,25(2):80-82.
[3] 汪沛,罗锡文,周志艳,等.基于微小型无人机的遥感信息获取关键技术综述[J].农业工程学报,2014,30(18):1-12.
[4] 谭仁春,李鹏鹏,文琳,等.无人机倾斜摄影的城市三维建模方法优化[J].测绘通报,2016(11):39-42.
[5] 魏长婧,汪云甲,王坚,等.无人机影像提取矿区地裂缝信息技术研究[J].金属矿山,2012(10):90-92.
[6] 周高伟,李英成,任延旭,等.低空无人机双介质水下礁盘深度测量试验与分析[J].测绘学报,2015,44(5):548-554.
[8] ROCK G,RIES J B,UDELHOVEN T.Sensitivity Analysis of Uav-Photogrammetry for Creating Digital Elevation Models (dem)[J].ISPRS-International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2012,38(1):69-73.
[9] 熊登亮,陈舫益.采用无人机影像生成高原山区高精度DEM的一种方法[J].测绘与空间地理信息,2014(1):127-128.
[10]何敬,李永树,徐京华,等.无人机影像制作大比例尺地形图试验分析[J].测绘通报,2009(8):24-27.
[11]李晶,赵艳玲,杨成兵.土地复垦中非平衡土石方量的计算与调整研究[J].煤炭工程,2010,1(6):95-98.
[12]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007:1-128.
[13]隋立春,张熠斌,柳艳,等.基于改进的数学形态学算法的LiDAR点云数据滤波[J].测绘学报,2010,39(4):390-396.
[14]沈晶,刘纪平,林祥国.用形态学重建方法进行机载LiDAR数据滤波[J].武汉大学学报(信息科学版),2011,36(2):167-170.
[15]卢遥,余涛,卢小平,等.基于高差分析的点云数据提取矿区地表沉陷信息方法[J].测绘通报,2013(3):22-25.
