ND200型蓄电池自转向机动平车的研究与设计
2018-04-04徐艳丽
徐艳丽
(中铁二十二局集团第二工程有限公司,北京 100041)
在高铁CRTSⅢ型无砟轨道板的生产过程中需要运输大量混凝土,而通常因生产基地的地形限制,2个制板车间与混凝土搅拌站呈L形布置,造成运输混凝土平车轨道呈十字交叉状,见图1。
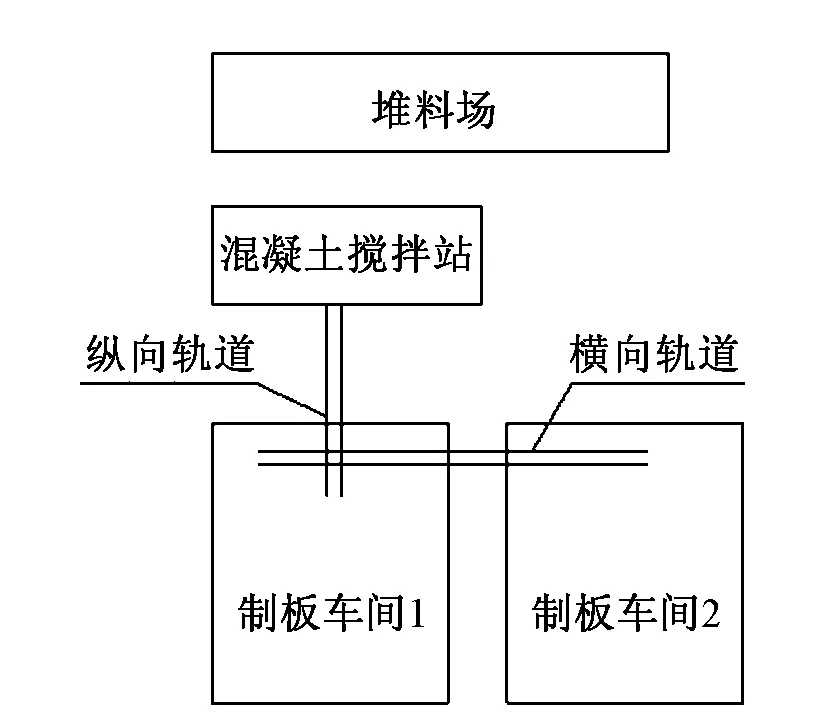
图1 生产基地布置示意
根据CRTSⅢ型无砟轨道板的生产工艺可知,混凝土的运输平车先进入纵向轨道上方的混凝土搅拌站装运混凝土罐,装好车后纵向下行至横向轨道,再横向运行至2个制板车间进行下一步作业。因此,需在纵横向轨道上各配备1辆运输平车,设备投入费用较高。而且该方法装运工序复杂,操作人员配置数量多,劳动强度大,运输效率低。
本文基于经济实用、安全可靠的原则[1-2],设计ND200型蓄电池自转向机动平车,以满足混凝土罐装运及货物运输要求,降低劳动强度,提高运输效率。
1 ND200型蓄电池自转向机动平车
ND200型蓄电池自转向机动平车是集成了机械、电气、液压等技术的无砟轨道板生产配套设备,适用于十字交叉轨道运输。既可装运2满罐、2空罐,又可装运1满1空罐,实现偏载转向。该平车具有顶升、车辆自动转向、自动对位落轨槽功能,有效提高了混凝土罐的运输效率,解决了机动平车在运输过程中停车位置不准、回转与横向定位不准及混凝土罐吊回落位不准的问题[3-6]。
1.1 系统组成
ND200型蓄电池自转向机动平车主要由机械部分、蓄电池电源、液压系统、电气控制系统等组成,见图2。其中,机械部分可分为走行机构、车体组成、回转与横向定位装置。
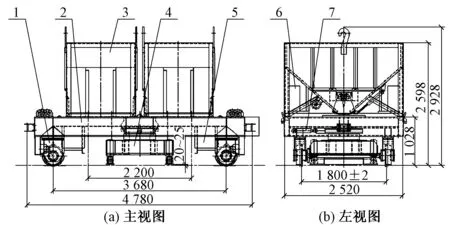
1-走行机构;2-车体组成;3-混凝土罐;4-回转与横向定位装置; 5-蓄电池电源; 6-电气控制系统;7-液压系统图2 ND200型蓄电池自转向机动平车组成示意(单位:mm)
1.2 主要技术参数(见表1)
1.3 机动平车转向定位工作原理
工作原理:①检查车辆纵向中心与轨道中心是否重合,若不重合可以调整横移机构使之重合;②顶升油缸开始工作,当机动平车车轮离开钢轨面约50 mm时停止工作;③驱动马达开始工作,使回转支承转向90°,当车体纵向与转向的轨道方向一致时停止转向;④顶升油缸开始下落,使车轮落入钢轨。若车轮与钢轨有少许偏差,可以通过横移装置微调,直至车轮准确落入钢轨。
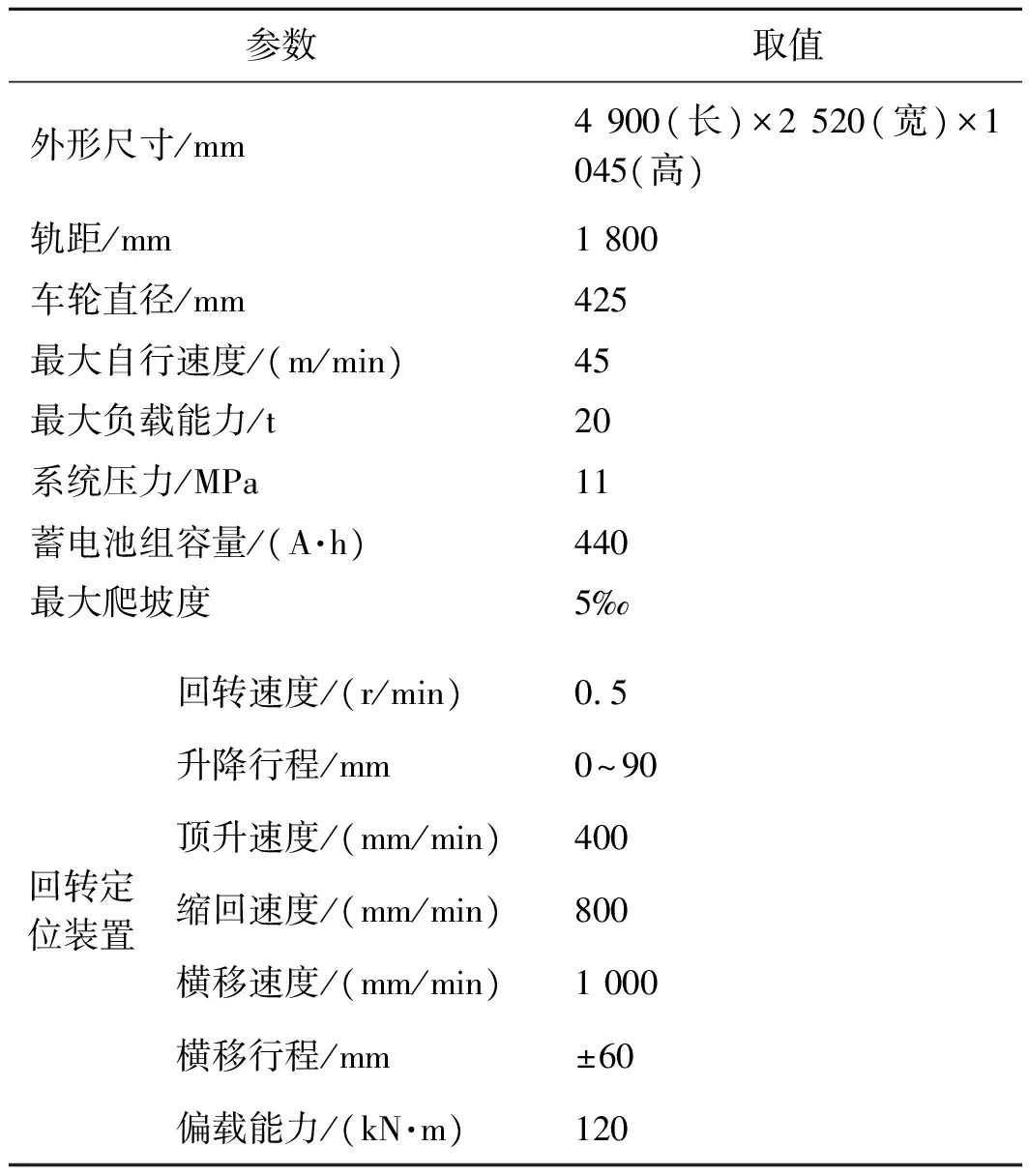
表1 主要技术参数
2 主体结构设计
2.1 车体
车体由型钢和板材组焊而成,主要由纵梁、大横梁、小横梁、边梁、底板等组成。型材的材质为Q235A钢,板材的材质为Q345A钢。车体的边梁为承载梁,选用截面高446 mm的H形钢;纵梁和大横梁选用截面高200 mm的工字钢;小横梁选用角钢。在车体上平面铺设花纹板可以防滑。为保证落罐准确,车体还应设有限位措施。
2.2 走行机构
走行机构由轮箱安装座、轮箱、轮对、传动装置等组成,是机动平车的支撑与走行执行机构。其中,带电磁制动器的永磁直流电机和减速机构成传动装置,并由蓄电池组提供动力。机动平车使用时速度较低,可直接利用电机的电磁制动器制动。该制动器为失电制动,能够保证驻车时不溜车。
2.3 回转定位装置
回转定位装置由横移机构、回转机构、回转支架和顶升机构组成(见图3),主要作用是使机动平车在十字交叉轨道处转向并保证走行轮落轨到位。横移机构与车体由滑槽联接,通过横向定位油缸的伸缩实现车体与回转定位装置相对横移。回转机构由回转支承和驱动马达组成,马达驱动回转支承旋转实现机动平车的转向功能。回转支架为钢结构焊接件,是回转定位装置中各机构的安装基础。顶升机构的顶升油缸缸体连接回转支架,活塞杆连接顶升底座,通过油缸升降实现对整个车体的顶升[7-8]。
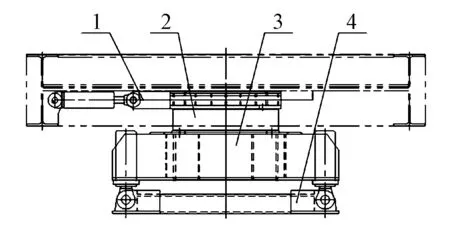
1-横移机构;2-回转机构;3-回转支架;4-顶升机构图3 回转定位装置结构
2.4 蓄电池电源
蓄电池电源由24节2 V440 A·h动力铅蓄电池组成,可以输出48 V和24 V直流电压。DC48 V为机动平车提供走行电机和液压系统电机用电,DC24 V则提供液压控制系统和照明用电。
选用48 V/60 A智能充电机在机动平车空闲时对蓄电池组充电并进行智能控制,实现恒流-恒压阶段自动转换,有效避免了充电过载。蓄电池组充满电后,自动停止充电。
3 控制机构设计
3.1 液压系统
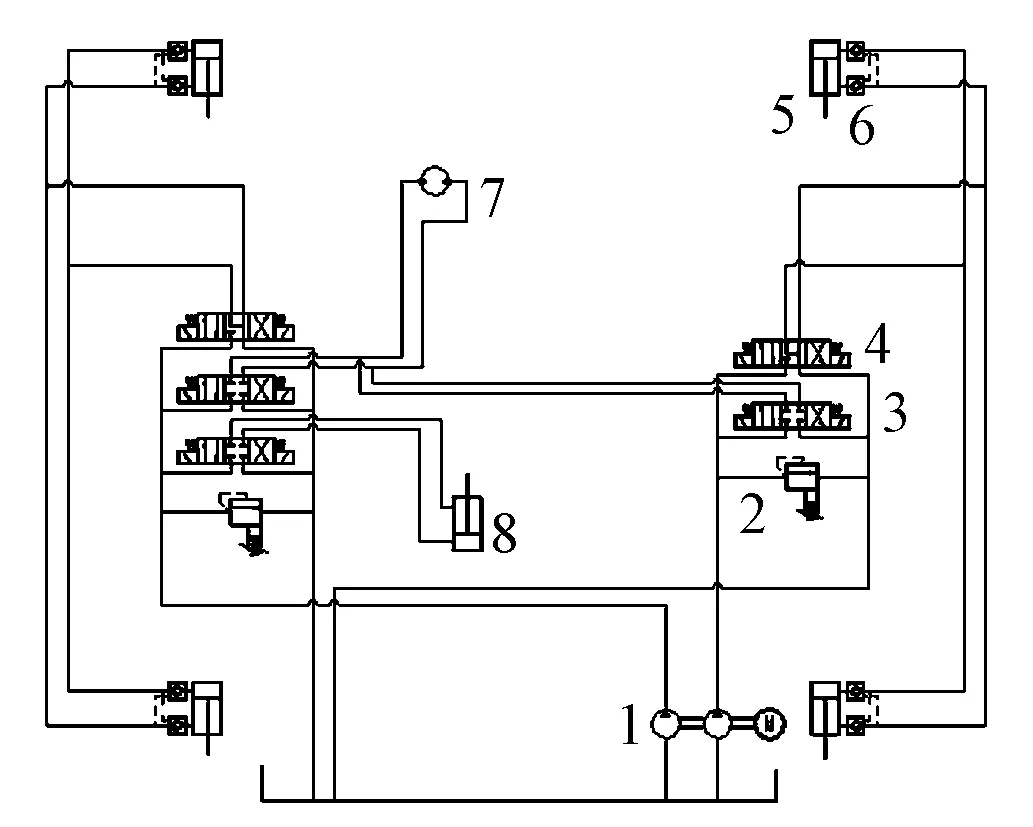
1-双联泵;2-溢流阀;3-回转电磁阀;4-顶升电磁阀;5-顶升油缸; 6-双向液压锁;7-回转马达; 8-横移油缸图4 液压原理
液压系统主要为回转定位装置的横移、回转和顶升提供动力,如图4所示。该液压系统采用规格相同的双联泵为动力源,由于双联泵排量相同可以实现平车纵向前后2组顶升油缸同步顶升。2组顶升油缸分别由2组三位四通电磁阀控制升降,升降油缸还配有双向液压锁,在顶升车体的过程中,可以在任意位置停止顶升,且较长时间保持位置不变。防止了液压管漏油或爆管导致车体失速下落,起到安全保护的作用。回转支承的驱动马达由双联泵各自的三位四通电磁阀控制2泵合流供油或单独供油,可以实现回转速度高速和低速2档速度。
3.2 电气控制系统
电气控制系统由走行控制子系统、回转定位子系统、信号照明子系统等组成。走行控制电气原理如图5 所示。机动平车走行采用遥控器或有线手柄操作。电气控制柜安装在车体端部,防护等级在IP55以上[9-10]。

图5 走行控制电气原理
4 主要部件选型与校核计算
4.1 走行电机的选型计算
机动平车的主要设计参数:机动平车质量m0=6 500 kg;附加蓄电池质量m1=2×1 100 kg;最大承重为运输2个混凝土罐,质量m2=2×10 000 kg;车轮直径d=425 mm。
考虑到机动平车在工厂内运行且没有曲线和坡道,故机动平车运行时的最大阻力主要由摩擦阻力Fm组成,坡道阻力、曲线阻力和风阻力忽略不计。车轮轴承型号选用6316-2RZ深沟球轴承,取摩擦阻力系数ω=0.005,最大爬坡度w=0.005,则机动平车运行时最大阻力Fj为
Fj=(m0+m1+m2)g(ω+w)
(1)
式中,g为9.8 m/s2。
将参数代入式(1)得到Fj=2.81 kN。
采用走行电机数量m=2,电机同步效率η1=0.95,机械传动效率η2=0.8,机动平车的设计速度v=45 m/min,则走行电机功率P1为
P1=Fjv/(60×1 000mη1η2)
(2)
将参数代入式(2)得到P1=1.38 kW。
走行电机拟选用常州永沛机电技术有限公司的直流电机,型号为YB90B3-48V/1.5-1500,其额定转速为n0=1 500 r/min,功率P0=1.5 kW。配套减速机选用常州国茂国泰的GR47-21.81/1500-M5/6型减速齿轮箱,其减速比i1=21.87。
在走行机构的传动齿轮中,小齿轮齿数n1=23,大齿轮齿数n2=44,计算传动比i2=n2/n1=1.91。
走行轮实际走行速度v3为
v3=πdn0/(i1i2)
(3)
将参数代入式(3)得到v3=47.92 m/min,与设计速度45 m/min接近,符合要求。
4.2 液压系统技术参数匹配计算
初选液压系统额定压力Pn=11 MPa,顶升油缸选型为100/70缸,即缸径D1=100 mm,活塞杆径d1=70 mm,行程L1=85 mm。横移油缸选型为80/40缸,即缸径D2=80 mm,活塞杆径d2=40 mm,行程L2=120 mm。回转马达排量为250 mL/r。
1)顶升油缸的参数计算
顶升力总和为
Fd0=(m0+m1+m2)g
(4)
将参数代入式(4)得到Fd0=281 260 N。
因油缸数量为4个,则单油缸顶升力Fd1为 70 315 N,且作用面积为无杆腔。顶升油缸的工作压力Pd1为
(5)
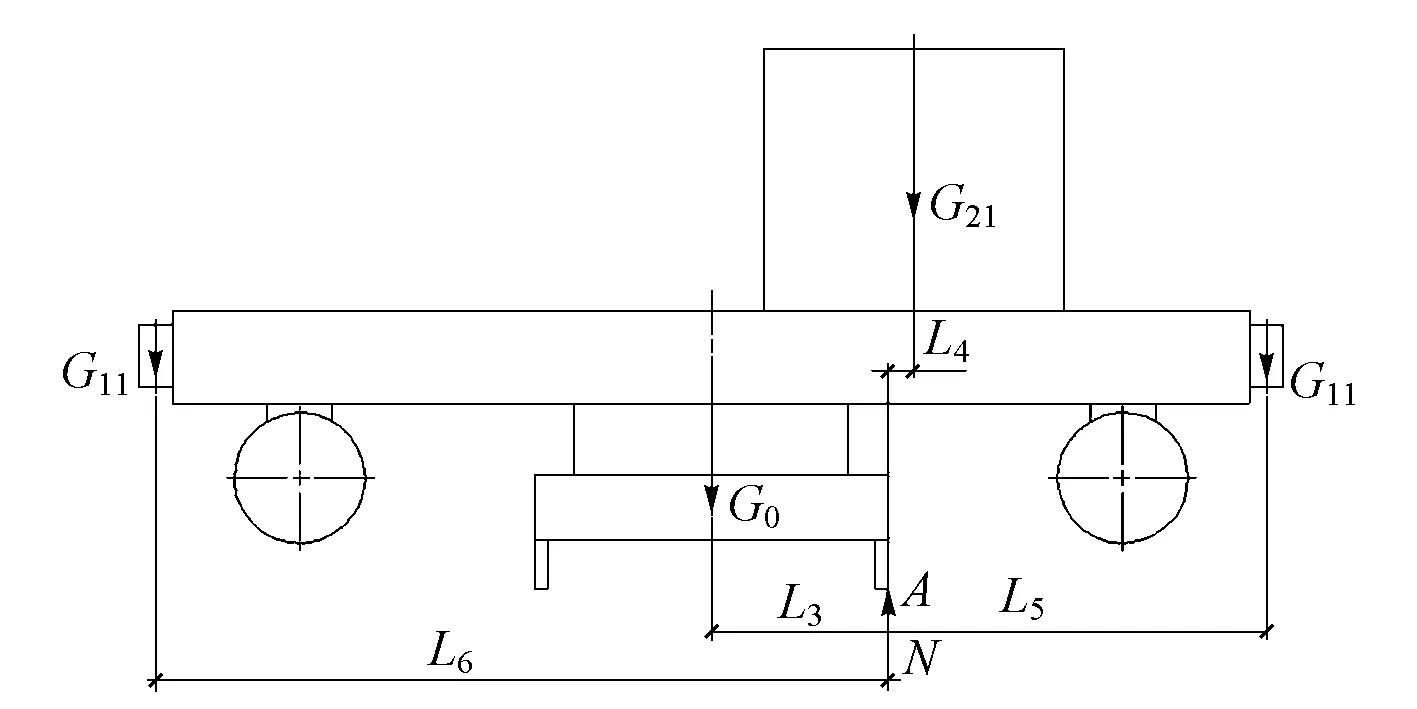
将参数代入式(5)得到Pd1=8.95 MPa 顶升油缸速度v4=400 mm/min,则顶升油缸的流量Qd1和功率Wd1分别为 (6) Wd1=Pd1·Qd1 (7) 将参数代入式(6)和式(7)得到Qd1=3.14 L /min,Wd1=0.47 kW。 2)横移油缸的参数计算 横移摩擦因数μ=0.1,则横移油缸的顶升力Fdh为 Fdh=(m1+m2+m3)gμ (8) 将参数代入式(8)得到Fdh=28 126 N。 横移油缸缩回工作面积为有杆腔,工作压力高为恶劣工况。因此,应校核油缸缩回情况,则横移油缸的工作压力Pdh为 (9) 将参数代入式(9)得到Pdh=7.46 MPa 横移油缸速度v5=1 000 mm/min,则横移油缸的流量Qdh和功率Wdh分别为 (10) Wdh=Pdh·Qdh (11) 将参数代入式(10)和式(11)得到Qdh=3.77 L /min,Wdh=0.47 kW。 3)回转马达的参数计算 回转马达型号为BM3-250摆线马达,排量vm=252 mL /r。转盘采用江阴华方SE21-125回转式减速器,减速比i0=125,在Pe0=11 MPa额定工况下输出转矩Me0=21.9 kN·m。机动平车回转时,最大计算阻力矩为Mm=15.2 kN·m,则回转马达的工作压力Pm为 Pm=MmPeo/Me0 (12) 将参数代入式(12)得到Pm=7.6 MPa 回转机构的转速ne0=0.5 r/min,马达容积率ηv=0.9,则回转马达的流量Qm和功率Wm分别为 Qm=i0vmne0/ηv (13) Wm=PmQm/(60ηv) (14) 将参数代入式(13)和式(14)得到Qm=17.4 L /min,Wm=2.5 kW。 4)液压系统泵和电机的选型 由于顶升、横移、回旋3个动作均单独动作且互锁,回旋为流量与功率最大工况,考虑泵的容积效率为0.9,则泵的计算流量为19.33 L /min。采用CBWL-E306/E306-ALPR型液压泵,排量为6.3×2 mL /r,压力等级为16 MPa。选择功率为4 kW的电机,采用YB90B3-48V/4.0-1500型直流电机。 机动平车在运输混凝土罐的过程中主要有4种装载形式:2个满混凝土罐;1个空混凝土罐,1个满混凝土罐;只有1个空混凝土罐;只有1个满混凝土罐。由此可知,抗倾覆计算中最不利工况为“只有1个满混凝土罐”,此时平车回转最容易倾覆。该工况下的计算简图如图6所示。图中参数:平车质量m0=6 500 kg,单个蓄电池组质量m11=1 100 kg,单个混凝土罐质量(满载)m21=10 000 kg,L3=715 mm,L4=125 mm,L5=1 675 mm,L6=3 105 mm。 图6 抗倾覆计算简图 运输车绕顶升装置底座右侧A点最容易发生倾覆,则左端和右端绕倾覆点A的转矩Mz和My分别为 Mz=m0gL3+m11gL6 (15) My=m21gL4+m11gL5 (16) 将参数代入式(15)和式(16)得到Mz=79 017 N·m,My=30 306 N·m,Mz>My,故运输车不会发生倾覆,且安全冗余量较大。 2016年3月完成了ND200型蓄电池自转向机动平车的方案和生产图纸设计,已在制板车间投入使用。ND200型蓄电池自转向机动平车见图7。该车在京沈高铁轨道板项目投入运行以来,能够自动转向通过十字交叉轨道,车辆运营状态良好,满足了混凝土罐装运及货物运输的要求,并为运输提供了可靠保证。 图7 ND200型蓄电池自转向机动平车 ND200型蓄电池自转向机动平车具有顶升、车辆自动转向、自动对位落轨槽功能,实现了混凝土罐在十字交叉轨道上运输的目的,具有以下优点:①自带转向功能无需辅助装置,为用户节约了成本,操作简单,提高了混凝土罐的运输效率;②液压和电气系统均配置了过载保护,可确保设备和人员安全;③回转和走行操作均采用无线遥控控制,操作人员可以在最佳观测位置操作,且不受空间限制,提高了操作效率。 [1]王金诺,张质文,程文明,等.起重机设计手册[M].北京:中国铁道出版社,2013. [2]李闻.铁路无砟轨道板预制场模块化整体规划技术研究[J].铁道标准设计,2014,58(8):68-72. [3]梁志力.蓄电池直流电动转运平车的设计[J].叉车技术,2001(2):13-15. [4]贾潍,于永庆.100t大型点动平车的研制[J].冶金设备,2012(2):64-66. [5]练学标,王厚刚.可转向电动平车搬运技术开发与应用[J].水运工程,2008(6):141-144. [6]方颂安.跨沟电动平车的结构形式[J].起重机运输机械,1999(2):13-14. [7]张国龙.回转支承的选型分析计算[J].建筑机械化,2000,21(2):35-37. [8]陈霞.回转支承的检修及问题浅析[J].通用机械,2004(3):31-33. [9]周祥龙.电平车的蓄电池牵引控制方法[J].电工技术,2009(8):69-70. [10]李立山,穆岩岩,张江田,等.电力蓄电池牵引车车体轻量化设计[J].铁道机车车辆,2017,37(3):54-57.4.3 机动平车回转时抗倾覆计算
5 应用效果

6 结语
