MCU+DSP的LFMCW雷达信号处理系统设计
2018-04-03安徽博微长安电子有限公司
安徽博微长安电子有限公司 陈 勇
1.LFMCW雷达信号处理系统方案
基于MCU+DSP双核架构进行系统设计,其具体方案如图1。此系统主要就是将单片机信号采集与处理作为其重要核心,其中DSP是信号处理的关键,而单片机主要的作用就是生成调制信号、调理差频信号调理,进行采集处理;同时,DSP也具有测距算法、串口通信等功能,其中在单片机中以及DSP的信息传递以及通信主要就是通过高速SPI方式开展。
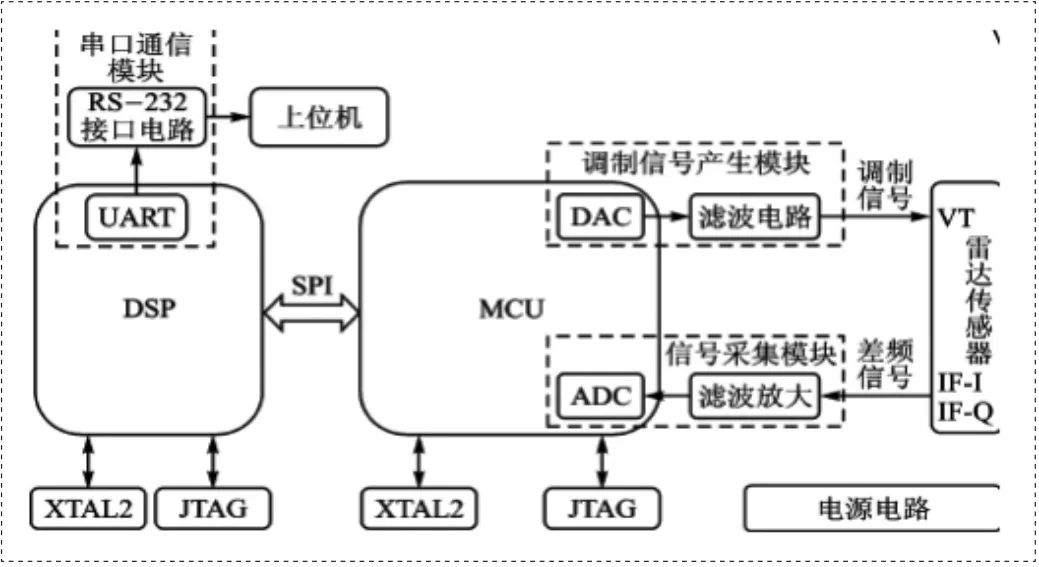
图1 LFMCW雷达信号处理系统方案
射频前端部分采用24 GHz LFM-CW雷达传感器,其VCO调制信号电压以及发射频率曲线节能型控制。调制信号电压主要就是要控制在1.20V~2.46V之间,发射信号线的发射频率为24.040GHz~24.505GHz,调频宽带的数值为465MHz。MCU主要应用G8051F120,输出频率坐高可达到50kHz,通过相位累加的算法,利用自定义函数表示周期信号。在G8051F120中集12位ADS,通过编程对其转换速率进行控制,最大数值为100 ksps。
2.系统设计
2.1 调制信号产生模块
在雷达前端压控振荡器中存在较为显著的非线性的特征,可以利用三角波节能型的调制信号进行连续波频率的系统调整,且其并没有线性变化。而通过对雷达前端中的开环矫正、闭环矫正的方式改善VCO输出信号线性度进行改善。在工程中主要应用的方式就是开环矫正。通过调制信号电压以及对发射频率之间的关系进行调整,通过非线性的调制电压信号的驱动雷达传感器,降低VCO中的非线性影响。
设计主要就是通过G8051F120中的DAC,利用直接的数字频率进行DDS原理的合成;利用非线性矫正的方式进行各种信息数据的存储,对调整信号进行调用生成。波形产生主要就是通过累加器、定时器以及存储器进行调用,在进行定时器的调整过程中,通过相位累加器的数值进行PHASEADD的增加 ,在通过存储器进行DAC输出数值的查找。
在DDS输出信号的频谱中涵盖了理想输出频率、高频干扰以及DDS数字杂散,对此必须要对其进行滤波处理。DAC要通过低通滤波器产生三角波信号,要对高频干扰进行滤除,在通过OP284放大器进行信号放大处理,并且将放大电路输出作为雷达传感器的信号输入,具体的电路如图2:
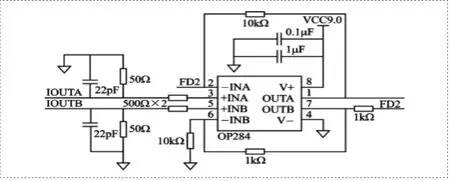
图2 调制信号滤波电路原理图
2.2 信号采集模块
在雷达方程中的LFMCW测量的实际距离以及差频信号之间的功率之间是四次方,在远距离的测量过程,相关信号以及噪声信号进行混杂,导致有用信号收到干扰。同时,差频信号中还是存在一定的固定频率的信号干扰,这样就会导致出现误判的问题,对此必须在信号采集之前必须要进行滤波的处理。
在设计理论测距范围主要为1m~10 m,调制信号带宽B的数值为465 MHz,扫频周期T数值为4 ms。在设计过程中通过NE5532进行二阶巴特沃斯有源低通滤波器以及高通滤波器的构建。在将低通的滤波器以及高通滤波器级进行关联,构成一个带通类型的滤波器,其主要范围为1. 55 kHz ~15. 5 kHz,放大倍数,二倍频的衰减数值为24 dB,保障其与差频信号滤波的实际需求相吻合。
要基于奈奎斯特采样定理进行ADC的采样,保障其采样率高于差频信号的最高频率数值的2倍。同时ADC转换位数要选择12位,应用的电压为内置的参考电压。必须要综合实际需求以及其成本等内容。保障单片机中内置的ADC与既定的需求一致,同时,其内置的ADC模块不占用CPU内存,在这种状况之下进行数字信号的存储。此种设计模式具有稳定性、设计结构相对较为简单,且成本较低。
2.3 SPI通信模块
在实践中可以可以将MCU采集整理到的差频信号数据通过高效的方式进行传递,在DSP中进行处理,这样可以满足实时性的需求。同时在串行外设接口中通信的占用接口相对较少,且通信速度相对较快,也可以在C8051F120以及TMS320F28335上运行,效果显著。
SPI通信硬件主要分为主机以及从机两个部分,在操作将主机以及丛机进行链接,将主机的发送以及丛机的接收系统进行链接,在将主机的接收以及丛机的发送进行链接,将主机与丛机的时钟、使能四根线进行连接,就可以实现通信。
基于丛机选择线的SPISIEA使能的实际状况,将丛机以及主机的SPI时钟线进行链接,这样主机以及丛机在通信过程中就不会需要起始位、停止位等同步的格式位,只要直接的把其采集整理到的信息数据与主机中SPI时钟线进行链接,这样就是可以实现对不同数据信息内容的有效发送以及传递控制。丛机在接受到较为完整的信号之后,设置的中断标志就会接受信息数据,在将引动寄存器受到的信息内容进行然后,将其在主机的SPI接收数据的寄存器SPIRXBUF中进行处理,进而完成单片机以及DSP之间的信息传递以及通信处理。

图3 程序流程图
2.4 串口通信模块
C8051F120可以同时支持两个UART串行端口的应用,可以支持单片机以及相关应用标准中不归零格式中的异步外部设备之间的信息传递以及通信。因为在上位机的串口中主要就是应用RS-232中的DB9接头,对此可以将UART与MAX3232进行连接,这样就可以将TTI、电平以及RS-232之间的转换组偶尔。在操作中将发送信号线、接受信号线以及地线进行连接就可以作为全双工通信。
2.5 信号处理模块
在DSP中主要就是通过相频匹配的频率估计算法进行信号处理。此种方法误差是现阶段测距精度相对较高的一种算法,主要就是通过计算量相对较小的算法进行频率的估计分析,在通过频率对其估计数值进行构建,获得参考信号,然后基于参考信号以及自定义的各种信号系统,基于柯西不等式进行误差函数的构建,误差函数获得最小的时候其相关频率就是估计的频率数值。
2.6 系统软件设计
在系统工作的过程中,首先要进行初始化启动作业,设置初始化控制、做到接口初始化、中断设置等进行初始化作业,在中断程序,在中断程序作业中,MCU要生成调制信号、集合各种信息数据,实现DSP的信号处理。而在进行中断程序作业过程中必须要通过间隔512个数据,对其进行系统的采集与处理,在利用信号处理方式进行函数的信号处理,这样就可以获得一定的距离信息数据。然后,将距离信息通过串口的方式进行信息传递将其发送给上位机,具体流程如图3。
3.结束语
线性调频连续波类型的雷达是一种最小测量距离近、高精度,受自然环境影响相对教学的雷达。在液位测量、无人驾驶以及警戒监控等领域中广泛应用。现阶段雷达信号处理系统主要就是基于现有的雷达信号处理系统主要基于 MCU+DSP系统开展。其中DSP的浮点运算能力相对较强,支持复杂的算法那,但是其外设的驱动能力相对较弱,可以为农村系统控制以及信号采集以及处理,在一定程度上降低了其预算能力。而MCU系统的外设较为丰富,运算能力相对较弱,无法进行复杂算法的操作。
[1]王斯盾,刘鹏.MCU+DSP的LFMCW雷达信号处理系统设计[J].单片机与嵌入式系统应用,2017,17(12).
[2]李晨.基于ARM嵌入式技术的LFMCW雷达信号处理系统的设计与实现[D].南京理工大学,2015.
[3]罗磊,袁红林,徐晨.5mm波段LFMCW雷达信号处理系统[J].科技致富向导, 2014(21):271-272.