基于模块化设计的养老机器人
2018-04-02饶颖卿张明一曾海峰
张 坤 ,饶颖卿 ,张明一 ,曾海峰 ,马 兵
(1.武汉大学电气工程学院,湖北武汉 430072;2.纵科(武汉)信息技术有限公司湖北武汉430074)
国家统计局公布的第六次人口普查数据显示,我国60岁及以上人口占13.26%,其中65岁及以上人口占8.87%,人口老龄化问题日益严峻。在人口老龄化的背景下,集护老、助老多项功能于一体的养老机器人是社会生活所迫切需要的[1]。
在助老助残、家用服务机器人方面,日美韩德等国处于领先地位,如日本产业技术综合研究所的老年陪护机器人“帕罗”、美国iRobot公司的Roomba系列吸尘器机器人等[2]。国内服务类机器人中具有代表性的是科沃斯电气有限公司的扫地机器人。扫地机器人可以自主规划路径,完成清扫任务[3]。杭州市社会福利中心的“阿铁”老年服务机器人可以陪老人聊天、提醒老人按时服药[4]。但这些养老服务机器人的功能相对单一,无法满足老人的诸多需求。
基于模块化设计的养老机器人可满足老年人的多种需求,并能根据不同用户的需求搭载不同服务模块。
1 机器人开发平台构架
1.1 功能模块设计
1)控制模块:采用STM32作为养老机器人的控制芯片。
2)驱动模块:采用4个DC12V直流电机,选择L298N作为电机的驱动芯片。在电机转轴上安装码盘,通过红外光电计数器实现测速。
3)电源模块:选用18节3 400 mAh的大容量18 650锂电池以“六串三并”方式输出24 V直流电压,为老年养老机器人提供能量。
4)通信模块:选用可编程无线路由器GL-INET传输数据,以实现对机器人的远程控制。
1.2 机器人开发平台整体架构
养老机器人的开发平台采用上下两层结构。上层放置控制单元STM32核心板、5 V稳压模块和无线路由器GL-INET。下层放置电机驱动模块L298N、锂电池组和6路超声波测距传感器[5]。
一个L298N模块可以输出两路PWM脉冲,机器人采用两个L298N模块来控制4个直流电机。智能车开发平台的正前方、左前方、右前方、左右两侧和后面分别安装超声波测距传感器HC-SR04,探测周围环境信息以实现自动避障功能。锂电池组24 V电压经过5 V稳压模块后输出给STM32控制芯片,STM32核心板的5 V电源为路由器供电。
2 自动避障系统
2.1 环境信息获取模块
超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量[6]。超声波测距传感器发射超声波,记发射初始时刻为t1,遇到障碍物后返回,接收端接收到返回的超声波时为接收时刻t2,由发射到接收所用时间计算出巡检机器人到障碍物的距离S。

v为超声波在一个标准大气压,气温为15℃时的传播速度,取值为340 m/s。
养老机器人的左前方、正前方、右前方、左右两侧和后面分别安装一个超声波测距传感器,探测距离为2~450 cm,精度为3mm,满足室内避障的精度要求。超声波测距传感器安装位置如图1所示。
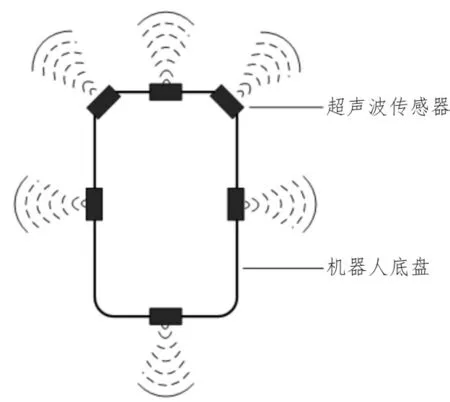
图1 超声波测距传感器安装位置图
2.2 避障控制单元
超声波测距传感器采用I/O触发测距方式,核心控制芯片STM32给TRIG引脚一个10微秒的高电平信号,超声波测距传感器发送8个40 kHz的方波。此时开启中断计时器TIM4,当接收到回波信号后关闭中断计时器TIM4。中断计时器开启时间即为超声波从发射到接收所用时间,从而计算出障碍物到机器人的距离。STM32依次调用正前方、左前方、右前方、左侧、右侧和后面的超声波测距传感器,测量机器人周围6个方位的环境信息,综合6个方位的环境信息控制机器人自动避开障碍物[7]。
2.3 自动避障算法
自动避障系统通过超声波测距传感器
获得机器人周边环境信息后,依据机器人到障碍物的距离来划分障碍物优先级。距离越近,避障优先级越高,机器人优先躲避级别高的障碍物[8]。正常情况下,机器人靠右行驶。遇到障碍物后,从障碍物左侧顺时针沿障碍物运动,到达前方后结束避障操作。若从左侧无法绕过障碍物,机器人则尝试从障碍物右侧逆时针方向绕过障碍物[9]。
养老机器人选用模糊控制算法实现自动避障。定义如下5个物理量:前方安全距离、侧面安全距离、前方转向临界距离、侧面转向临界距离和危险距离。当机器人到障碍物的距离小于“前方安全距离”或“侧面安全距离”时需要转向,距离大于“前方转向临界距离”和“侧面转向临界距离”方可安全转向,机器人任一部位到障碍物的距离均小于“危险距离”时停止运动。
根据机器人运动速度和场地条件,适当为上述5个物理量取值。养老机器人设定的“前方安全距离”为15 cm,“侧面安全距离”为4 cm,“前方转向临界距离”为10 cm,“侧面转向临界距离”为6 cm,“危险距离”为3 cm。自动避障算法流程图如图2所示。
3 远程控制与监控视频传输系统
3.1 通信系统原理与方案
机器人选择无线路由器GL-INET作为中继,电脑与无线路由器GL-INET之间采用TCP/IP协议进行通信,无线路由器GL-INET与STM32控制芯片之间通过串口通信。通信系统原理如图3所示。
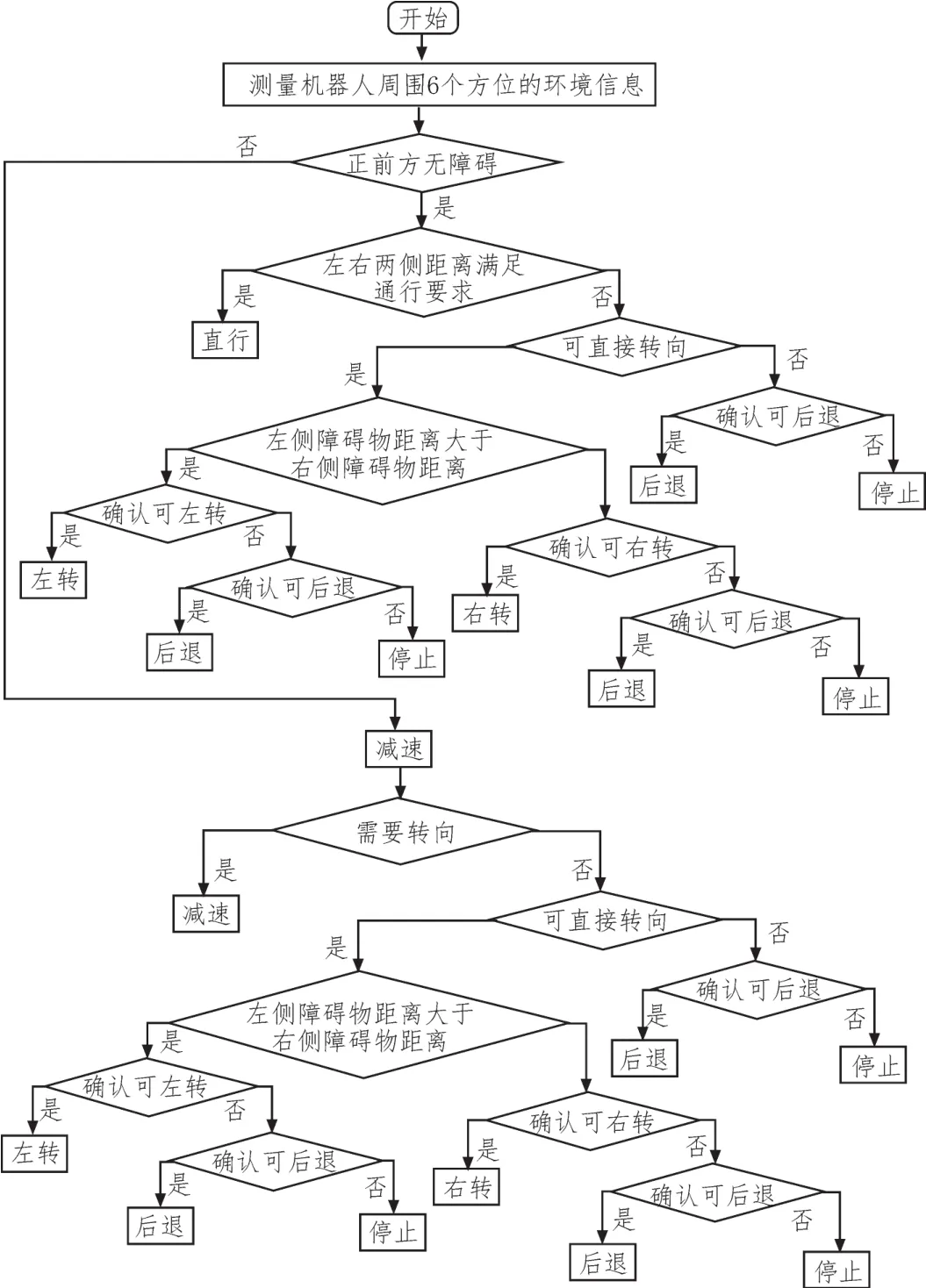
图2 自动避障算法流程图
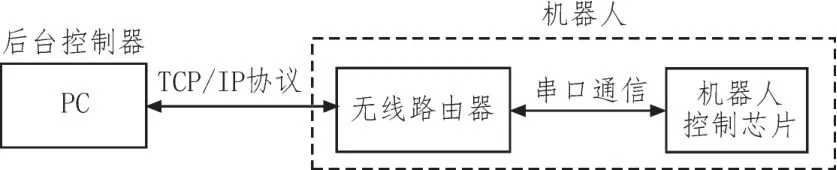
图3 通信系统原理图
3.1.1 TCP/IP通信方案
机器人采用LABVIEW软件构建TCP/IP通信系统,电脑作为TCP通信客户端,无线路由器GL-INET作为TCP通信服务器,服务器与客户端处于同一网络环境下。服务器一直处于监听状态,客户端按照TCP/IP协议与服务器建立联系,发送控制指令[10]。
3.1.2 后台数据处理
机器人的部分功能,如实时绘制室内地图等功能对处理器要求很高,因此采用的方案为依靠电脑完成对大量数据的存储和处理,并将最终结果返回给机器人。无线路由器GL-INET安装在机器人上,机器人传感器数据通过无线路由器传递给电脑,电脑对数据处理完毕后返回控制指令。
3.1.3 机器人控制系统
机器人控制系统指令集为:“W”前进,“A”左转,“D”右转,“S”后退,“X”停止。
根据TCP/IP协议,客户端向服务器发送数据时必须先告知服务器发送数据的长度。客户端发送字符‘A’时,服务器将收到字符串“1A”。在串口传输中,数据以ASCII码的格式传输,STM32单片机接收到的字符串“1A”的ASCII码,即“0x3141”。当单片机接收到“0x3141”时执行左转命令。养老机器人可根据需求扩展控制指令集。
3.2 视频传输系统
养老机器人选用自动对焦的1080P高清摄像头采集监控画面,经过无线路由器发送至LABVIEW软件制作的视频监控系统界面,实现机器人对室内情况的监控。
4 语音识别系统以及GSM模块
4.1 语音模块系统设计
语音识别电路采用LD3320芯片,通过1 kΩ上拉电阻与STM32单片机I/O连接。控制引脚RDB,CSB和复位引脚RSTB和中断返回引脚INTB通过10 kΩ上拉电阻与STM32单片机I/O连接,保证系统的稳定工作。为稳定麦克风的电压,采用了RC滤波电路,并在MBS引脚加了偏置。
LD3320芯片内部内置16位A/D转换器、16位D/A转换器和功放电路,支持并行和串行接口,麦克风可以直接与芯片管脚连接,完成语音采集和识别功能,通过ICRoute公司嵌入LD3320内的优化算法,不需要用户事先训练和录音,即可完成非特定人语音识别,识别准确率为95%[11]。
为了进一步提高识别的准确率,将需要识别的词汇存储在LD3320的识别词汇库内。当语音识别芯片接收到语音信息后,首先与词汇库进行比对,若与词汇库内的词汇相匹配则将识别结果通过串口传递给STM32控制芯片,执行对应操作,否则不执行操作[12]。实验结果显示,此方案的识别准确率在99%以上。
4.2 GSM模块
4.2.1 概述
GSM系统有几项重要特点:号码资源丰富、通话清晰、稳定性强不易受干扰、通话死角少、手机耗电量低等[13]。基于这些优点,采用GSM作为养老机器人的通信模块。
4.2.2 GSM模块的设计
养老机器人选用SIMCOM公司的SIM800作为通信模块。SIM800模块可支持4频GSM/GPRS,采用省电技术设计,在休眠模式下耗电流低至1.0毫安。具有标准AT命令接口,可以提供GSM语音、短消息等业务。GSM模块工作流程如图4所示。

图4 GSM模块工作流程图
若外界发生火灾、出现求救信号,机器人主控芯片处理后将通过串口给SIM800模块发送AT指令即可实现打电话和发短信的功能。
5 火灾报警系统
火灾报警信息采集系统由多个传感器协同完成,确保火灾报警的准确度。火灾信息采集装置包括温湿度传感器、火焰传感器和一氧化碳传感器。
分别设定温湿度传感器、火焰传感器和一氧化碳传感器的报警阈值,若两个或3个传感器的数据都超过报警阈值,机器人通过GSM模块向老人或指定手机号发送报警信号[14],同时拍摄现场图片便于判断火情的严重程度;若仅有一个传感器的数据超过报警阈值,机器人拍摄现场图片发送给老人或指定手机,请求人工判断。火灾报警系统原理图如图5所示。
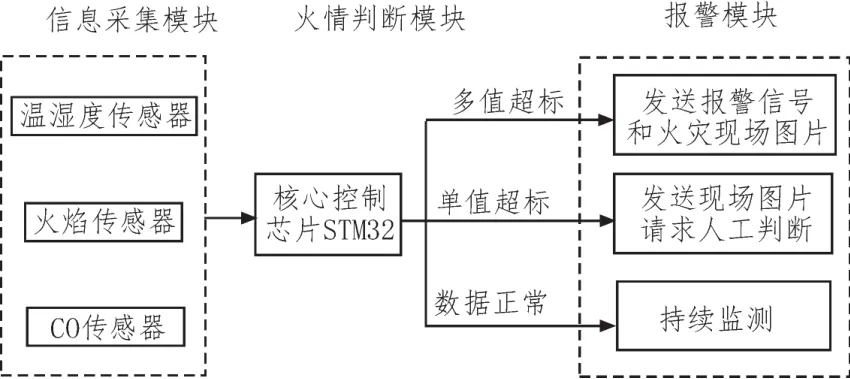
图5 火灾报警系统原理图
6 自动充电系统
6.1 欠电识别
养老机器人选用HT70XX系列的HT7070芯片用于电压检测。将电压阈值设定为18 V,由于HT7070能检测的最大电压为7 V,因此对其采用分压法进行检测。在系统电压低于18 V后,机器人开始规划路径寻找充电桩进行充电。
6.2 路径规划
6.2.1 室内地图的绘制
目前室内定位大多基于信号衰减原理,由室内固定信号源向机器人发射信号,机器人接收到3个信号源的信号即可确定机器人的位置。确定位置后,机器人遍历各房间即可完成室内地图的绘制。常见的发射信号有超声波、蓝牙、超带宽(UWB)。但这些信号在穿透墙体和空气时的衰减特性不同,若信号源与机器人中间有墙体阻隔,会出现很大的定位误差,不适用于有多个房间的家庭住宅,常用于仓库等大型空旷场所。为克服此问题,养老机器人采用惯性传感器绘制室内地图。绘制室内地图过程如图6所示。
将充电桩所在位置作为绘制地图的基准点,机器人从充电桩出发,沿墙绕各房间一周。机器人上安装的里程计和角度计记录机器人行走路径,绘制出室内地图[15]。
6.2.2 机器人识别自身位置
机器人根据里程计和角度计的数据判断自身和充电桩的相对位置[16]。由于里程计和角度计存在累积误差,故机器人每次回到充电桩后将里程和角度置零,有效控制误差。

图6 绘制室内地图示意图
6.2.3 机器人与充电桩对接
为避免机器人运动对老人行走的干扰,充电时机器人沿墙体向充电桩运动。机器人跟据自身与充电桩的相对位置,由最短路径优先原则判断按照顺时针或逆时针方向沿墙体运动至充电桩附近[17]。到达充电桩附近后,通过多组超声波测距传感器,与充电桩对准。
6.3 充电桩设计
常规充电插孔的孔径很小,对机器人运动的精确度要求过高。研究发现采用长条槽状孔,方便机器人与充电桩结合。充电桩长条槽状孔的高度与机器人插头的高度一致,当机器人进入充电区后,机器人插头插入充电槽任意一段均可进行充电。当机器人电池电压到达24 V后,充电完成,机器人自动离开充电桩。充电桩示意图如图7所示。
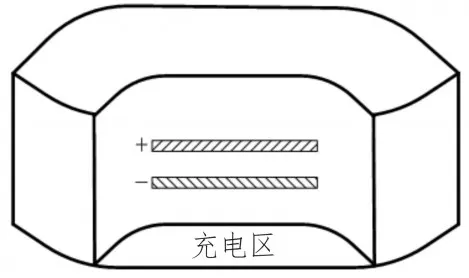
图7 充电桩示意图
7 结束语
养老机器人实现了自动避障、远程控制、视频监控、语音识别、火灾报警以及自动充电等功能。该机器人经济、实用,为老年人的生活提供方便,具有较强的市场推广价值。同时,这些设计对养老机器人相关问题的解决提供了可借鉴的方法。机器人还可以与社区服务结合,社区服务人员通过养老机器人获取老人的信息,与机器人配合,提供更好的服务。
参考文献:
[1]王田苗,陶永,陈阳.服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012(9):1049-1066.
[2]M Hersh.Overcoming barriers and increasing independence-servicerobotsforelderlyanddisabled people[J].International Journal of Advanced Robotic System,2015,12(114):1-3.
[3]宋章军.服务机器人的研究现状与发展趋势[J].集成技术,2012(3):1-9.
[4]屠大维,江济良,许烁,等.移动作业助老助残服务机器人人机协作:认知建模及其应用[J].高技术通讯,2012,22(12):1257-1263.
[5]Yu Zhong-hai.Generic technology of home service robot[J].Applied Mechanics and aterials,2012(121-126):3330-3334.
[6]邹波.基于多超声波测距与模糊控制避障系统的设计与实现[D].西安:西南交通大学,2013.
[7]陆斌.自动避障和火焰搜索在智能灭火机器人中的实现[J].工业控制计算机,2012(2):105-106.
[8]耿以才,黄立新,陈凌珊,等.无人船安全目标追踪与自动避障算法[J].计算机测量与控制,2015(7):2467-2469,2474.
[9]Creed Ben C,Arsenault Aaron,Velinsky Steven.Obstacle avoidance for autonomous mowing[J].Mechanics Based Design ofStructures and Machines,2012,40(3):334-348.
[10]杨诚诚.局域网环境下TCP/IP协议栈实时性改进[D].哈尔滨:哈尔滨工业大学,2013.
[11]Daniela Şchiopu.Using statistical methods in a speech recognition system for romanian language[J].IFAC Proceedings Volumes,2013,12(1):99-100.
[12]梁静.基于深度学习的语音识别研究[D].北京:北京邮电大学,2014.
[13]潘朝,罗小巧,黄佳,等.基于GSM短信的智能家居控制系统的设计[J].电子测量技术,2013(6):121-124.
[14]韩盼盼,王红蕾.基于GSM的智能小区家居火灾报警控制系统[J].现代机械,2013(4):82-85.
[15]杨娜,李汉舟.服务机器人导航技术研究进展[J].机电工程,2015(12):1641-1648.
[16]王显.智能清扫机器人路径规划及自动充电系统研究[D].郑州:郑州大学,2014.
[17]Song Kai,Zhu Chun-bo,Li Yang,et al.Design and implementation of an autonomous wireless charging robot system using magnetically coupled resonance[J].Transactions of China Electrotechnical Society,2014,29(9):38-43.