基于AD2S1210的旋转变压器解码系统设计
2018-04-02陈梦民王艳
陈梦民,王艳
(北京交通大学北京 100044)
由于开关磁阻电机具有启动转矩大、效率高等优点而被广泛应用,随着电力电子器件和控制技术的发展,开关磁阻电机驱动控制技术也随之迅速发展。在开关磁阻电机的驱动控制中必须实时检测转子的位置,使各相的开关器件完成正确的切换,获得连续的转矩,同时在电机恒转速的闭环控制中也需要知道电机的转速,所以对开关磁阻电机转子位置和速度的准确检测将直接关系到控制系统的性能。当前在开关磁阻电机转子位置的检测上,使用最多的是光栅编码器和霍尔传感器,相比于以上两种方法,旋转变压器在自身结构特点上的优势,使它具有耐冲击、耐震动、耐高温的特点,可以在恶劣环境下使用,例如在电动汽车中的使用[2]。由于旋转变压器的输出是包含电机转子位置和速度的电压信号,不能被控制系统直接利用,所以需要将其输出的电压信号转换成角度和速度信号,才能被控制系统所使用[3-4]。传统的解码器采用放大电路,滤波电路,模数转换电路搭建而成,不仅结构复杂,而且调试难度也比较大。本方案采用亚德诺半导体公司研发的高精度高分辨率的旋转变压器专用解码芯片,其内部集成有正弦波发生器,可以产生励磁信号,并能够对旋变的输出信号进行可靠解码[5]。
1 旋转变压器的工作原理
旋转变压器和普通变压器的工作原理实际是一样的,只是由于转子旋转,定子励磁绕组和转子输出绕组之间相对位置的变化会引起绕组间互感的变化,由此,我们知道其输出电压与转子位置有关。按照其输出与转子角位置关系的不同,旋转变压器可以分为很多种,其中比例式旋变的输出与角度成比例关系,线性旋变的输出与角度成线性关系,其结构原理如图1所示。
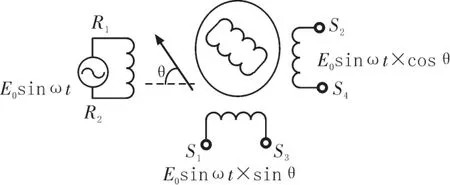
图1 旋变原理图
从图上可知:

E0为励磁电压的幅值,ω为励磁电压的角频率,θ为转子角度。
两个次级绕组在机械上相差90度,给初级绕组施加正弦波励磁后,会在定子次级绕组上的耦合出幅值随转子位置变化的电压。旋变输入与输出的理论波形如2所示。

图2 旋变输入输出信号
2 AD2S1210解码原理
2.1 AD2S1210概述
AD2S1210 Analog Devices模拟器件公司研制的是一款旋转变压器解码芯片[7]。输入端允许的输入电压范围3.15Vp-p±27%、频率为2 kHz至20 kHz范围内的正弦信号。转换器内部有一个二型伺服环路,它可以跟踪输入信号,将旋变的输出信号转换成输入角度和速度所对应数字量保存在相应的寄存器中。可以通过并行端口或者串行接口读取绝对角位置数据,为了满足不同的精度要求,分辨率是可以设置的。速度和位置寄存器都是16位的,并且是高位有效。AD2S1210的功能框图如图3所示。

图3 结构框图
2.2 解码原理
当旋变转动了相当于最低有效位对应的角度时,输出就会变化一个最低有效位。转换器产生的输出角φ,反馈后与输入角θ进行比较,以便跟踪轴角θ,两个角度的差值即为误差,如果转换器正确跟踪了输入角度,那么误差趋近于0。为了更方便的测量误差,可以对旋变的输出信号进行如下处理:

两者的差值为:

内部的闭环系统由一个相敏解调器、一个积分器和一个补偿滤波器组成,它能够将误差信号调零。当误差信号无限趋近于零时,在转换器规定的精度范围内转换器产生的输出角φ即等于旋变转角θ。AD2S1210的解码原理如图4所示。
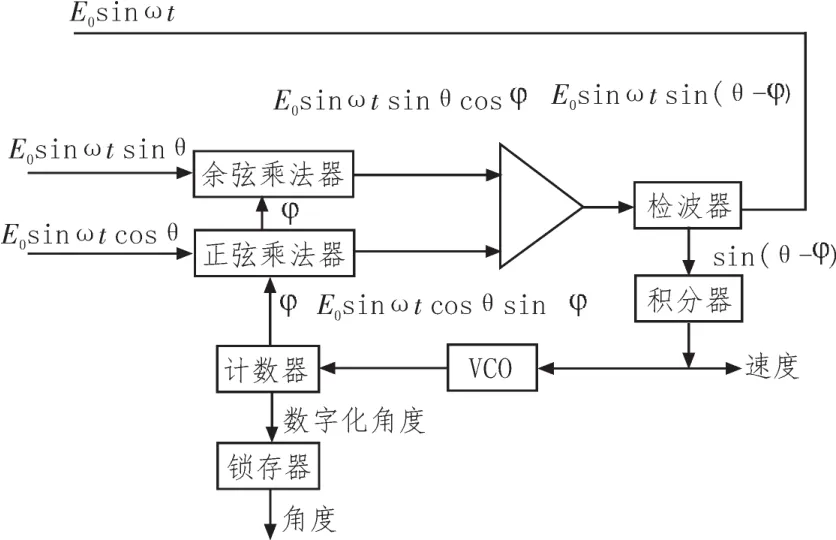
图4 解码原理图
2.3 硬件电路
1)AD2S1210外围电路及其与旋变的接口电路
AGND和DGND引脚接地,AVDD和DVDD引脚接5 V正电源,去耦电容的典型值为10 nF和4.7 μF。施加于VDRIVE的电压控制并行和串行接口的电压。VDRIVE可以取为5 V、3 V或2.5 V。振荡器去耦电容的典型值为20 pF,参考去耦电容的典型值为10 nF和10 μF。其基本电路如图5所示。

图5 AD2S1210的外部电路
为了能使AD2S1210正常工作需要对励磁信号及旋变输出信号进行处理,使其满足旋变和解码器的输入要求。励磁信号处理电路如图6所示。

图6 励磁信号放大电路
EXC和EXC-是AD2S1210的励磁输出管脚,Vout接到旋变的励磁输入(差分输入)。由放大电路的基本知识知道励磁输出信号的放大倍数通过电阻R1和R2来调节。放大器的共模电压通过电阻R3和R4来调节。该方案选用的旋变的变比是0.5,旋变的输入的励磁要求是7Vrms,即为9.9VP-P。AD2S1210励磁输出端输出的是7.2VP-P的差分信号。所以励磁放大电路的增益为9.9/7.2=1.375,即R2/R1=1.375,取R1=7.5 kΩ,R2=10kΩ。滤波电容取100 pF。
2)AD2S1210与控制芯片的接口
为了使解码器能够正确的转换旋变角度以及读取解码器内部存储的角位置信息、速度和故障信息,需要对AD2S1210进行基本的配置,主要是分辨率及工作模式的选择。本方案采用的控制芯片是STM32F103ZET6。接口电路如图7所示,图中只画出了使用到的引脚。

图7 控制芯片接口电路
通过控制芯片的PB10和PB11控制A0和A1,实现对AD2S1210工作模式的选择,解码器有4种工作模式,工作模式及其设置见表1。

表1 工作模式设置
3 软件设计
在配置模式下对芯片的寄存器、激磁频率和分辨率进行配置。

图8 软件基本流程
4 测试结果
当接通电源后,AD2S1210输出的励磁信号如图9所示。
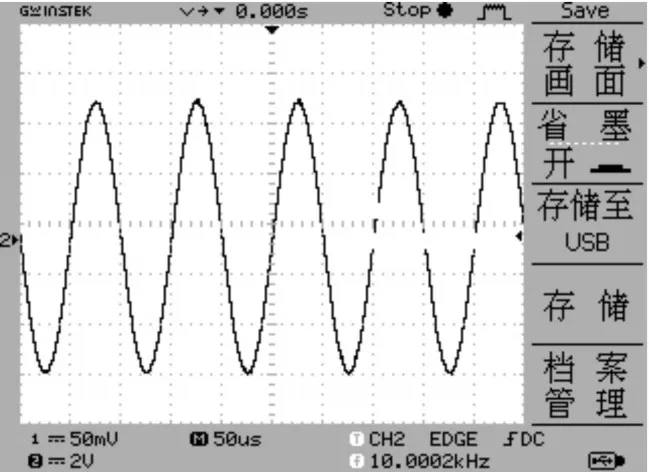
图9 励磁信号
由图可知励磁信号的峰峰值为10.5 V,频率为10.000 2 Hz,满足旋变对励磁信号的要求。
旋变的输出信号如图10所示。粗线为正弦绕组输出,细线为余弦绕组输出。

图10 旋转变压器的输出
图11 位置寄存器中存储的位置信息
将旋转变压器的输出接至转换器的正余弦输入端,通过控制芯片读取角位置信息,并通过串口助手显示AD2S1210位置寄存器中存储的位置信息,如图11所示。当位分辨率为n时,角度θ=360°·D/(2n-1),D为角度寄存器中存储的角位置信息,D为对应分辨率对应的最大值时,角度为360°,所以将寄存器中存储的数据转化为角度,通过串口显示,如图12所示。

图12 旋转变压器的角度信息
5 结 论
本文介绍了旋转变压器和解码芯片AD2S1210的原理以及应用,对解码芯片的外围电路以及其与控制芯片的接口电路进行了设计,同时完成相应软件的设计,对解码芯片进行正确的配置,对数据的读取,并通过串口显示了当前的位置信息,为电机的精确控制打下基础。试验结果证明电路工作可靠,方案具有可行性,具有一定的参考价值。
参考文献:
[1]李彦勤,徐国栋,王俊雄.基于虚拟仪器的旋转变压器角度测量系统的设计与实现[J].计算机测量与控制,2013,21(12):3190-3192.
[2]王骋,邓智泉,蔡骏.电机转子位置传感器的评述与发展趋势[J].微电机,2014,42(3):64-71.
[3]艾莉,杨恒辉.应用旋转变压器的轴角位置信号检测[J].电子科技,2014,27(7):96-98.
[4]何强,文小琴,游林儒.基于旋转变压器的SR电机位置检测系统研究[J].微电机,2012,44(5):46-48.
[5]王识君,和卫星,陈诚,等.AD2S1210在伺服电机控制系统中的应用[J].信息技术,2015(7):102-105.
[6]刘荣先,崔守鸷,李凡.基于霍尔元件的EPS位置传感器[J].解放军理工大学学报,2014,15(2):109-112.
[7]夏加宽,姜昊驰,于爽.基于旋转变压器的多级电动机转子位置检测系统设计[J].电气技术,2016(1):11-15.
[8]AD2S1210_cn[EB/OL].http://wenku.baidu.com/view view/1d345cb1dd36a3272758111.html.
[9]张健,吴忠,吴云涛.基于旋转变压器的伺服电机转子位置及速度检测[J].微电机,2013,46(11):22-28.
[10]谢智,马钧华.基于旋转变压器及TMS320F2805的伺服系统位置检测[J].轻工机械,2012,30(4):72-76.
[11]鲁浩,孙建忠,娄伟,等.基于旋转变压器零位检测的SRM启动策略研究[J].微电机,2014,47(3):43-46.
[12]郭新华,庄兴明,赵峰,等.旋转变压器解码芯片AD2S1200的解码原理与应用分析[J].微电机,2012,45(6):52-56.
[13]李岩,于爽,夏加宽,等.一种新型磁阻式正余弦旋转变压器解码方法[J].电气工程学报,2015,10(9):41-45.
[14]山丹,胥效文,史忠科.一种旋转变压器误差分析和校正方法[J].计算机技术与发展,2014,24(2):183-185.
[15]余洵,李玉杰,武继安.基于回转体转角高精度测量装置的标定方法[J].国外电子测量技术,2012,31(2):51-54.
[16]吕娜.基于旋转变压器的电机转子位置检测电路设计[J].机械制造与自动化,2012,41(1):153-155.