超声波电机的研究现状及应用前景
2018-04-02庄镇平杜栋乾张贵林
庄镇平,杜栋乾,张贵林
(肇庆学院 机械与汽车工程学院,广东 肇庆 526061)
0 引言
超声波电机是一种借助摩擦传递弹性超声振动以获得动力的驱动机构.压电陶瓷在高频交变电压的作用下产生逆压电效应,从而激发弹性定子在超声频段内的微幅振动,利用摩擦将定子驱动表面质点的椭圆运动转换成转子(或动子)的旋转(或直线)运动[1].超声波电机具有低速大扭矩、无噪音、断电自锁、快速响应以及不受磁场干扰等特性[2].此外,其结构的灵活性与紧凑性也符合现代化的微型理念.传统电机受自身工作原理及结构特点的限制,很难实现进一步的微小化;而超声波电机的出现让这一切成为可能,弥补了传统电机的不足,因而迅速在微型器械、精密仪器、光学设备、航空航天以及武器装备等领域得到应用.随着超声波电机技术的成熟,其制造成本将不断降低并实现广泛的商业应用,未来在机器人以及智能家居等领域都具有相当广阔的应用前景.
1 超声波电机在国内外的研究现状
1.1 超声波电机的国外研究现状[1-3]
人类首次利用弹性振动获得动力的尝试是从钟表开始的.1961年,日本Bulova钟表公司开始出售一种利用音叉的往复位移拨动棘轮而获得驱动的手表,月误差仅为1 min,创造了当时的世界记录,在各国学者中引起轰动.超声波电机的研究也就此拉开了序幕,众多学者对其展开深入研究并取得丰硕的成果,其中最出名的是日本的指田年生.1980年,他在Vasiliev的研究基础上,提出并成功制造出了驻波型压电超声电机,其结构如图1所示.该电机使用Langevin激振器,驱动频率为27.8 kHz,电输入功率为90 W,机械输出功率为50 W,输出扭矩为0.25 N·m,输出转速为2000 r/min,效率为50%.可以说,指田年生研制的这种压电超声电机,第1次满足了实际应用的需求;但由于这种电机的振动片与转子的接触是固定在同一位置上的,故仍存在着接触表面上摩擦磨损严重的问题.
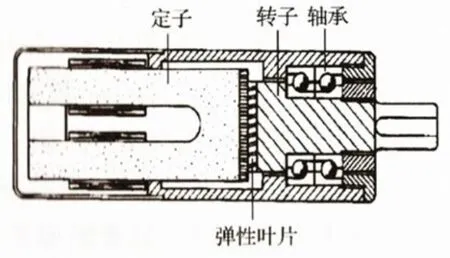
图1 驻波型超声波电机
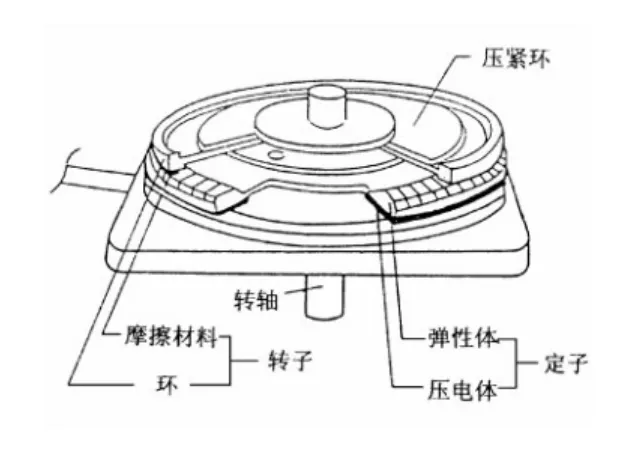
图2 行波型超声波电机
为了解决摩擦磨损问题,指田年生于1982年提出并制造出了另一种形式的压电超声电机——行波型超声电机,其结构如图2所示.这种电机实现了由驻波的定点、定时推动转子变成由行波连续不断推动转子,从而大大降低了定子与转子接触表面的摩擦磨损.这种电机的运行机理正是利用定子表面质点的椭圆运动在周向的速度分量,通过摩擦驱动转子转动.1987年,指田年生创立了新生工业公司,并将自己研制的行波型超声波电机正式作为商品进行出售.Canon公司将其研究的环形行波超声电机正式应用到EOS相机镜头的自动对焦系统中,这标志着超声电机开始进入实用阶段.
不难看出,上述各类超声波电机都属于接触型超声波电机,即通过定子与转子之间的接触摩擦传递动力.摩擦作用使得定子温度迅速上升,模态频率发生漂移,摩擦材料磨损加剧,导致输出不稳定,这也造成了超声波电机不能长时间连续工作,且有寿命较短的缺陷.
随着研究的深入,日本东京工业大学的上羽贞行教授带领研究小组开始对非接触型超声波电机进行初步研究,并提出了在定转子间加以空气或液体介质,从而实现定转子非接触式超声电机的方案,其结构原理分别如图3和图4所示.
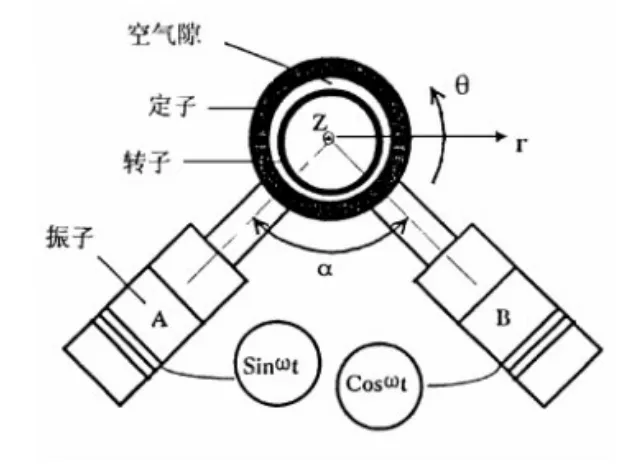
图3 空气介质的超声波电机
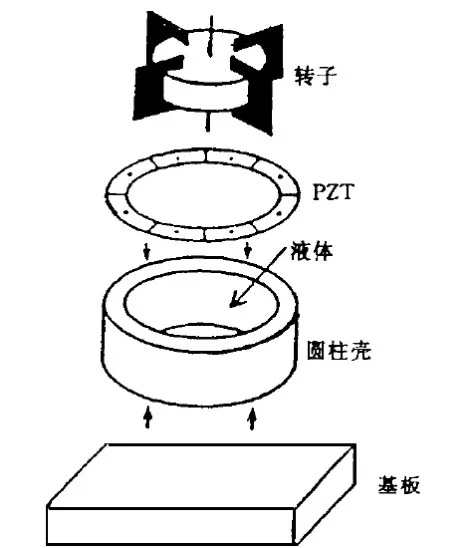
图4 液体介质的超声波电机
1.2 超声波电机的国内研究现状
我国是在20世纪80年代中后期才开始接触超声波电机.从90年代初期,一些高校和科研所先后对超声波电机展开研究,如清华大学、南京航空航天大学、浙江大学、吉林大学、中科院长春光机所、哈尔滨工业大学等,并取得了丰硕的科研成果.1989年,清华大学周铁英、董蜀湘[1]等申请了国内首项关于超声波电机的发明专利,并在微型超声波电机领域取得了一系列研究成果.1995年,赵淳生院士成功研制出了环形超声波电机,并对其工作机理以及运动数学模型展开了深入研究.2008年,国内首个超声波电机的产学研基地在连云港建立,并在南京、西安等地建立生产和销售公司,这也标志着我国超声波电机正式走向产业规范化[4].2013年12月14日晚,“嫦娥三号”成功登陆月球,南京航空航天大学研制的TRUM-30A超声波电机正式应用到月球探测车“玉兔”上,用于光谱仪的驱动与控制,如图5所示.这台电机质量仅为46 g,而转矩却达到0.12 N·m,质量仅为同样功能的传统电机的10%.此外,TRUM-30A超声波电机可满足-120~180℃的工况要求,且工作不受磁场及太空辐射的影响[5].
近年来,新型的电机结构、驱动控制技术以及如何实现商业化等方面逐渐成为研究的热点,特别是驱动控制技术方面,超声波电机良好性能的发挥离不开高性能的驱动控制电路.目前超声波电机的控制策略主要有固定增益或变增益的PID控制器、自适应控制器、神经网络控制器、模糊控制器以及混合控制器等[6-9].

图5 玉兔号月球探测车
2 超声波电机的应用前景
2.1 微型机器人
传统机器人往往是由电磁式电机提供驱动,由于电机转速一般较高且扭矩较小,因此需要配备繁重的减速机构实现低速大扭矩,且1个自由度就需要1个电机,导致机器人体积庞大,笨重且不够灵活.而超声波电机则可以实现低速大扭矩的直接驱动,且可做成多自由度超声波电机,实现单个电机即可满足多自由度关节的驱动.这对机器人的微型化与高度灵活性提供了可能,因此超声波电机在机器人领域具有相当广阔的应用前景.
2.2 航空航天
超声波电机自身不产生磁场亦不受磁场干扰,电磁兼容性好,因此受到了各国航天局的关注,致力于将其应用到各种太空探测器上,以应对恶劣的工作环境;与传统电磁式电机相比,超声波电机可以轻松地胜任昼夜温差大、太阳磁暴、大量太空辐射等环境,而且功率密度远胜于相同尺寸的电磁电机.此外,超声电机结构紧凑且灵活,易于集成化与微型化,从而可减轻探测器的体积与质量,是未来飞行器的理想驱动器.
2.3 生物医学
超声波电机具有体积小、速度快、响应灵敏等特性,在医学领域得到广泛应用.在细胞穿刺时,医生需要将传感器放到细胞里面,超声电机可以胜任这样的高难度任务.它体积小,进出细胞速度快,细胞不会变形、破裂.另外,在医用内窥镜探头的应用中,解决了传统电机体积过大,只能采用后置电机并通过钢丝连接驱动探头的问题,同时为内窥镜系统的超声诊断提供了可能.
2.4 精密仪器
传统精密仪器一般都是由伺服电机带动滚珠丝杆来提供动力,但由于零件加工精度以及丝杆本身螺纹空程和摩擦的存在,定位精度很难进一步提高.超声波电机的快速响应能力则很好地解决了这一难题,位置精度可达0.01 μm.随着超声波电机技术的成熟以及加工工艺的改进,未来超声波电机将很有可能实现纳米级的定位精度,进一步提高精密仪器的性能,更好地服务于人类.
2.5 智能家居
超声波电机现阶段主要应用于一些高端领域,国内更是“足不出户”,尚未实现让超声波电机走出实验室面向应用的层面.随着生活水平的提高,人们对物质以及生活环境的要求将进一步提升.众所周知,噪声是影响生活质量的一大因素.如何解决噪声问题将是未来智能家居重要的定位指标之一,传统电磁电机显然难以胜任.超声波电机工作频率一般在20~100 kHz,超过人类听觉范围(0.02~20 kHz),因此工作过程不产生噪音,可应用到智能家居以及办公设备等领域,如窗帘的自动卷帘与降帘、门窗的自动开启与关闭、座椅的自动调节以及家居的快速移动甚至机器人保姆等,应用领域相当广泛,消费群体庞大,市场前景将不可估量.
3 结论
本文介绍了超声波电机在国内外的研究现状,并就超声波电机的优良特性对其应用前景进行分析与展望.由于超声波电机是多个学科交叉的产物,所谓术业有专攻,研究人员往往不具备所需的全部学科知识,这导致研究力量分散,发展速度相对较慢,目前尚未建立起一套完整的理论体系.
参考文献:
[1]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:1-19.
[2]ZHAO Chunsheng.Ultrasonic Motors Technologies andApplications[M].Beijing:Science Press,2010:1-18.
[3]刘全景.非接触型超声波电机[J].压电与声光,1998,20(2):95-98.
[4]尤冬梅.超声波电机的研究现状及发展前景[J].电工电气,2016(1):1-3.
[5]沈大雷.南航助“嫦娥”完美登月[N].中国教育报,2013-12-18(08).
[6]郭吉丰,伍建国.航天用大力矩高精度超声波电机研究[J].宇航学报,2004,25(1):70-76.
[7]MOUSSA B.Active fault tolerant control for ultrasonic piezoelectric motor[J].Journal of Electrical Engineering,2012,63(4):224-232.
[8]张铁民.行波型超声波电机伺服控制系统的研究[R].南京航空航天大学,2000:8-14.
[9]史敬灼.超声波电机运动控制理论与技术[M].北京:科学出版社,2011:1-25.