多台转鼓式微滤机多模式控制系统设计与实验
2018-04-02叶章颖鲍伟君张丰登张亚东李海军朱松明
叶章颖 鲍伟君 张丰登 张亚东 李海军 朱松明
(浙江大学生物系统工程与食品科学学院, 杭州 310058)
0 引言
水处理是循环水养殖系统(Recirculating aquaculture systems, RAS)中的一项关键工艺流程[1-3]。在众多去除水体中会对养殖动物和系统产生危害的固体颗粒物[4-6]的方式中,转鼓式微滤机是应用最广泛的设备之一,主要用来去除粒径较大的颗粒物,具有通用性好,需要劳动力少、水头损失低、维护容易和占地空间小等优势[7-8]。
随着循环水养殖朝着高密度、集约化、精准化方向发展,自动化、信息化、智能化是必然趋势[9-12]。目前有关微滤机控制的文献报道较少,主要是对单台微滤机进行简单的启停控制[13-14],并没有分析其型号、结构、工作原理以及具体的控制系统设计,且控制系统基本上是采用硬逻辑控制,在复杂的养殖环境中容易发生故障。对于大型养殖企业来说,由于养殖面积大,养殖密度高,需要使用多台微滤机对养殖水体进行初级过滤,如果按照单台单控模式,不但会提高设备成本,而且一旦控制电器发生故障,排查起来比较困难,特别是工厂化室内养殖车间,为防止带入细菌,维修人员不可随意进出,这会给微滤机控制系统的维护带来不便。此外,对于靠液位开关监测反冲洗时才会运转的转鼓式微滤机主要配有2个液位开关,当其发生故障时,由于没有能应对此种情况的较为经济的工作模式,会导致微滤机对固体颗粒物的过滤不及时而影响后续水处理过程,进而影响整个系统的性能。
西门子(Simens) S7-200系列可编程逻辑控制器(Programmable logic controller, PLC)具有很高的性价比[15],能够适应复杂的养殖环境,可以减少设备之间的硬件接线,采用软逻辑控制更加安全,程序错误易查易改,可移植性强,对实现多台微滤机的控制具有较大的优势。针对多台转鼓式微滤机的控制要求,本文在分析框架式转鼓式微滤机的工作原理基础上设计基于PLC的10台转鼓式微滤机3种运行模式控制系统,对控制系统的软、硬件进行设计,对程序进行编写和验证,以期优化转鼓式微滤机机械性能,提高微滤机控制系统维护和管理效率,降低生产成本,为RAS装备自动化集成提供思路。
1 系统结构及工作原理
为了实现PLC对框架式转鼓式微滤机的自动化控制,需要分析其工作原理,以实现控制要求。转鼓式微滤机按照外观构造可分为箱体式和框架式两种类型。图1、2分别为框架式转鼓式微滤机的结构示意图和微滤机及液位开关的安装图。
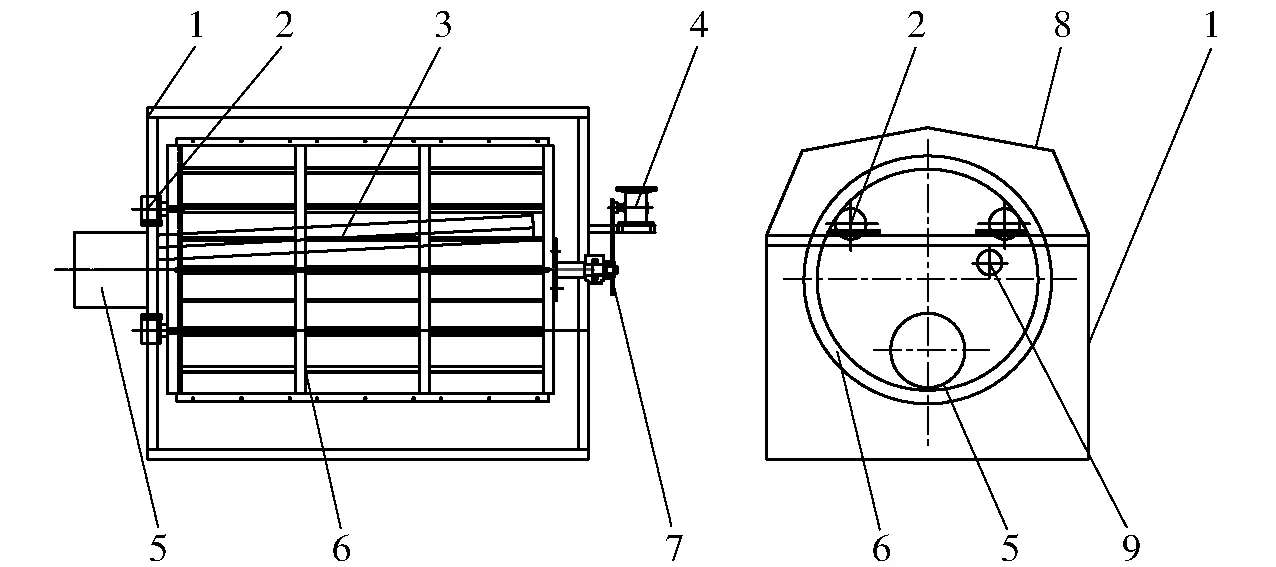
图1 框架式转鼓式微滤机结构示意图Fig.1 Structure schematic of microscreen drum filter with frame1.机架 2.支撑滚轮 3.排污槽 4.减速电动机 5.进水口6.转鼓框架 7.链轮 8.箱盖 9.排污口
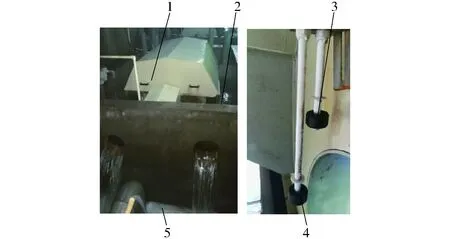
图2 转鼓式微滤机及液位开关的安装图Fig.2 Installation picture of microscreen drum filter and level switches1.转鼓式微滤机 2.安装微滤机水池 3、4.转鼓内液位开关 5.下一级水池
对于框架式转鼓微滤机,刚开始工作时,转鼓保持静止,养殖池中的污水从微滤机进水口进入转鼓内部,通过转鼓表面的滤网进行过滤,已经过滤的水体会进入下一个水处理环节,随着被滤网截留的固体颗粒物的不断累积,水流的阻力变大,致使转鼓内外形成一定高度的液位差,当转鼓中待过滤的水触发到高位置的液位开关时,控制系统会立即启动减速电机通过传动系统带动转鼓运转,同时开启反冲洗水泵抽取滤液经喷嘴喷出对附着在滤网上的固体颗粒物进行反冲洗[5],这些被截留下来的固体颗粒物会随着转鼓的运转通过排污槽经微滤机排污口排出。随着转鼓运转和反冲洗的同时进行,转鼓内待过滤污水会顺畅地从滤网孔流出,一段时间后,当转鼓内水位下降到低位置液位开关以下时,控制系统会使减速电机停止运转,同时关闭反冲洗水泵。此时,微滤机完成了一个工作过程,之后又进入下一个工作周期。
2 控制系统软硬件设计
2.1 控制系统硬件设计
通过对转鼓式微滤机工作原理的分析可知,系统涉及液位开关信号采集等多个信号输入和控制电机、水泵启停等信号输出。西门子公司生产的S7-200系列小型PLC不仅性价比高、功能强大、编程方便[15-16],而且可以适应像循环水养殖这样比较复杂的工作环境。
根据研究需求,本系统选择控制的微滤机数目为10台,为了便于管理和调试,微滤机设有3种工作模式,通过3挡转换开关来切换。在计算输入输出点数和考虑能适应减速电机和反冲洗水泵多次启停需求的基础上,选取CPU224 CN DC/DC/DC,14个数字量输入,10个数字量输出型号CPU模块,3个EM221,16个数字量输入型和1个EM221,8个数字量输入型24V DC扩展模块。其中第1台转鼓式微滤机的I/O地址分配如表1所示。
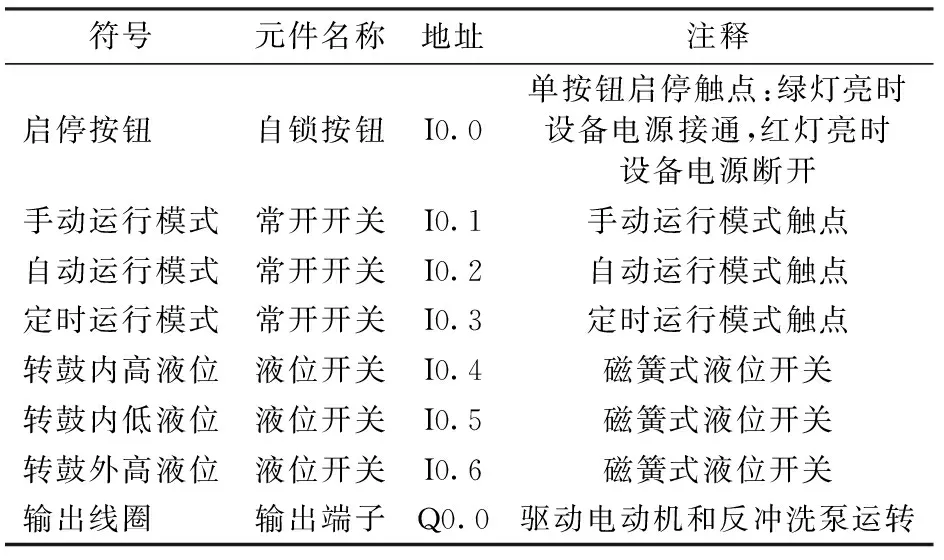
表1 控制第1台转鼓式微滤机I/O地址分配Tab.1 Distribution of I/O ports for controlling the first microscreen drum filter
2.2 控制系统软件设计
转鼓式微滤机控制系统程序流程如图3所示。开始时,接通电源,PLC上电初始化系统自检完成,一切正常后,选择工作模式,在手动模式中,可以手动控制减速电机和反冲洗泵的运行和停止,能随时调试检验微滤机能否正常工作;在自动模式中,只有转鼓内2个不同高度的液位开关都被水体触发时,减速电机和反冲洗泵才能运行,当转鼓内液位下降至低液位开关以下时,减速电机和反冲洗泵才能停止,当水处理系统液位发生故障时,减速电机和反冲洗水泵均不会运行;对于定时模式,是通过定时的方式来控制减速电机和反冲洗泵的运行时间和间隔时间,特别是当液位开关发生故障时,可根据水质情况启用定时模式,设置运行和停止时间可不至于因液位开关故障而导致微滤机对固体颗粒物的过滤不及时,影响后续水处理过程,进而影响到整个循环水养殖系统的性能。
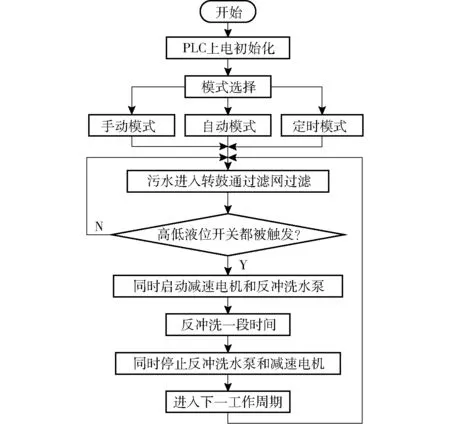
图3 转鼓式微滤机控制系统程序流程图Fig.3 Control system program flowchart of microscreen drum filter
3 多模式控制系统实验
3.1 系统实验
根据转鼓式微滤机的工作原理、控制系统软硬件设计以及程序流程图编写PLC控制程序。为了验证程序能否实现控制要求,根据西门子S7-200系统手册[16]结合微滤机的具体控制要求完成控制电路的接线以及减速电机、反冲洗水泵主电路的接线。所用转鼓式微滤机的型号为:QC-WL-1000K,转鼓规格为φ1 000 mm,滤网孔径120 μm,其中10台转鼓式微滤机控制系统结构图如图4所示,实验时,通过USB/PPI RS485编程电缆连接计算机的USB端口,将程序下载到PLC中进行实时监控和调试。
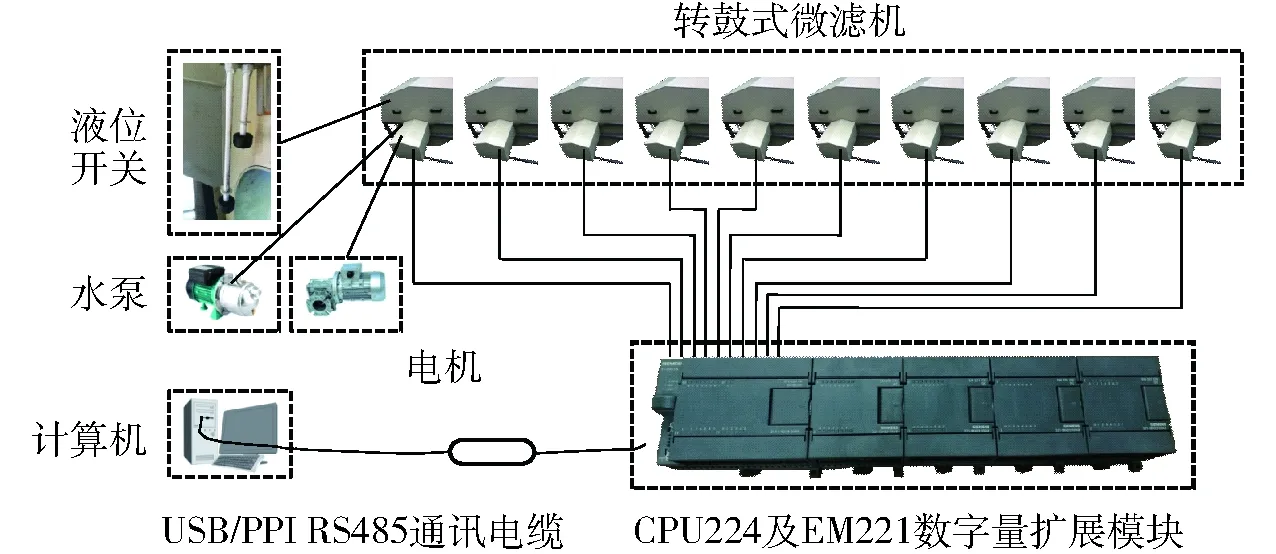
图4 转鼓式微滤机控制系统结构图Fig.4 Structure diagram of microscreen drum filters control system
3.2 结果分析
微滤机在手动模式下正常工作时波形图如图5所示,按下启停按钮,I0.0置高电平,电源接通,选择手动模式,I0.1置高电平,此时线圈Q0.0通电,驱动电机和反冲洗泵运行,关闭手动模式,I0.1置低电平,线圈Q0.0断电,电机和反冲洗泵均停止工作,当再次打开手动模式时按下启停按钮,I0.0置低电平,电机和反冲洗泵均不会运行,说明此种工作模式下,程序可以实现控制要求。

图5 微滤机在手动模式下工作波形图Fig.5 Waveforms of microscreen drum filter when it was run under manual mode
微滤机在自动模式下工作时的波形图如图6所示,按下启停按钮,I0.0置高电平,电源接通,选择自动模式,I0.2置高电平,转鼓内液位上升触发低液位开关时,I0.5置高电平,直至高液位开关也被触发I0.4置高电平时,线圈Q0.0通电,驱动电动机和反冲洗泵运行,此时液位开始下降,高液位开关很快复位,I0.4置低电平,当低液位开关也复位时,I0.5置低电平,线圈Q0.0断电,电动机和反冲洗泵同时停止运行。
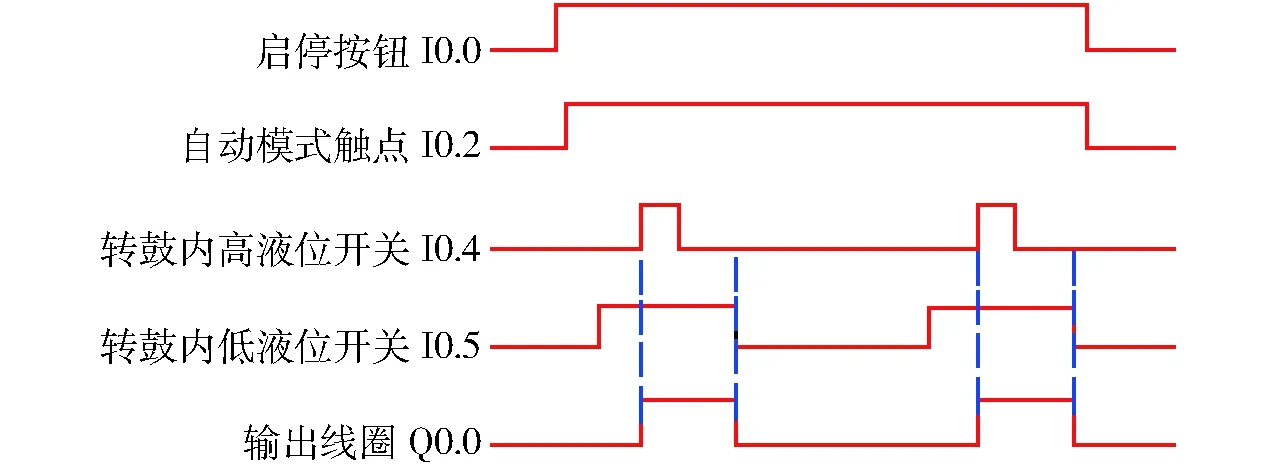
图6 微滤机在自动模式下工作波形图Fig.6 Waveforms of microscreen drum filter when it was run under automatic mode
当微滤机安装池水位出现故障时,波形图如图7所示,当转鼓外高液位开关被触发时,I0.4、I0.5、I0.6均置为高电平,线圈Q0.0不得电,电动机和反冲洗泵均不会运行,当水位恢复正常时,再次按下启停按钮,I0.0常开触点恢复断开,线圈Q0.0不得电,电动机和反冲洗泵均不会工作,说明自动程序能够满足控制要求。
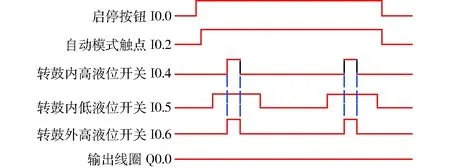
图7 水位出现故障时微滤机工作波形图Fig.7 Waveforms of microscreen drum filter when water level was out of order
微滤机在定时模式下工作时的波形图如图8所示,按下启停按钮,电源接通,I0.0置高电平,选择定时模式(为了便于验证,将暂停时间t1设为10 s,运行时间t2设为5 s),I0.3置高电平,线圈Q0.0会定时通断,10 s后电动机和反冲洗泵会同时运行5 s,然后暂停10 s,再运行5 s,如此循环,关闭定时模式,I0.3置低电平,电动机和反冲洗泵均不运行,说明定时模式程序能够满足控制要求。

图8 微滤机在定时模式下工作波形图Fig.8 Waveforms of microscreen drum filter when it was run normally under timing mode
按下启停按钮,I0.0置低电平,Q0.0不得电,不论模式转换开关处于何种模式,电动机和反冲洗泵均不会运行。由此说明,程序可以满足对微滤机的控制要求。
3.3 讨论
目前,RAS中的自动化控制主要体现在对pH值、温度、溶氧、氨氮、亚硝氮等水质参数的监控和采集[17-18]上,对常规设备的控制主要有增氧机、自动投饲机、水温调节装置、循环水泵和紫外杀菌器[17-22]等,控制数量和模式较为单一,因此对多台转鼓式微滤机进行多模式控制对提高RAS自动化水平具有一定的研究意义和实用价值。
此外,实验中发现,由于所用微滤机减速电动机位置较低,如果微滤机安装池水位出现故障,电动机会存在被淹的风险,为了避免发生此种情况,需要提高电动机安装位置。实际运行时还观察到:当转鼓内外液位差达到一定高度时,转鼓还会承受较大的压力(图9)。为了了解工作过程中转鼓的受力情况,合理配置微滤机部件,优化微滤机机械性能,为控制系统实验提供可靠的基础保障,现对转鼓进行受力分析。

图9 即将反冲洗时的状态Fig.9 State when it was about to be backwash
如图10所示,为微滤机静止时转鼓的受力情况,由静力学分析可知
∑Fx=0∑Fy=0∑MB=0
经计算可得
(1)
(2)
式中F1、F2——两个支撑滚轮对转鼓的支持力,N
F3——轴承端对转鼓的支持力,N
F4——转鼓中的水对转鼓的压力,N
G1——转鼓自身所受的重力,N
θ——支撑滚轮安装角度,(°)
l1——转鼓长度,m
l2——短轴长度,m
设转鼓内水所受的重力为G2,可求得

(3)
式中ρ——养殖水的密度,kg/m3
R2——转鼓内径,m
g——重力加速度,9.8 m/s2
y——转鼓内的水位值,m
根据牛顿第三运动定律可知G2=F4。
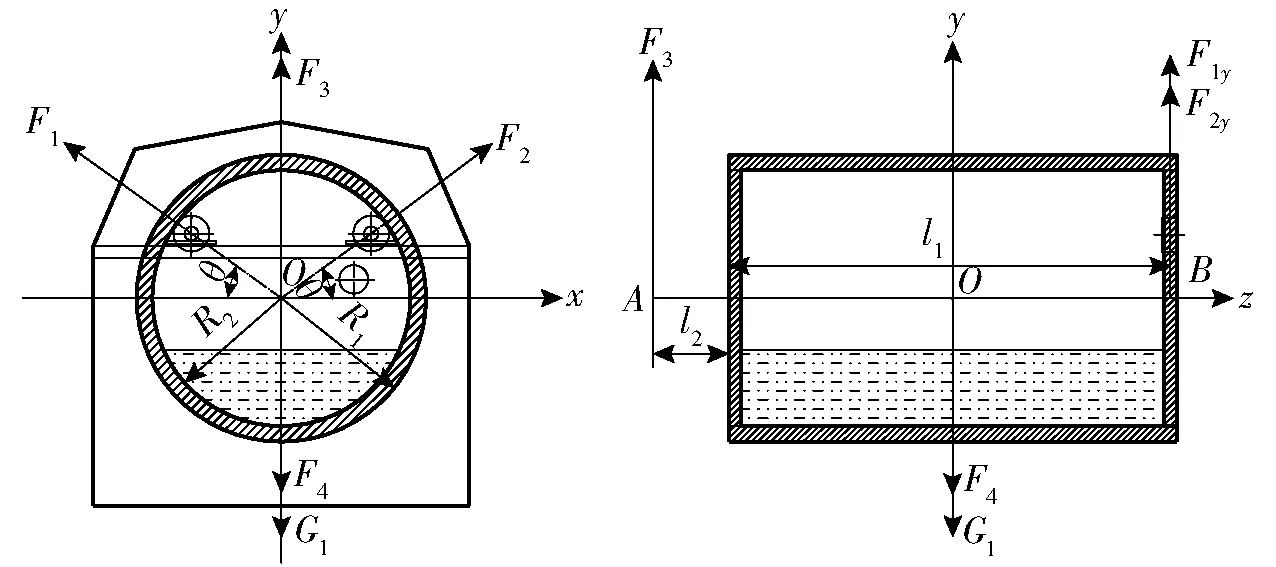
图10 微滤机静止时转鼓的受力分析Fig.10 Force analysis of microscreen drum filter at static
当微滤机开始反冲洗时,转鼓转动会受到2个支撑滚轮的摩擦力f1、f2,设微滤机逆时针转动,滚轮与转鼓之间动摩擦因数为f,此时受力分析如图11所示,由静力学分析可知
∑Fx=0∑Fy=0∑MBy=0
经计算可得
(4)
(5)
(6)
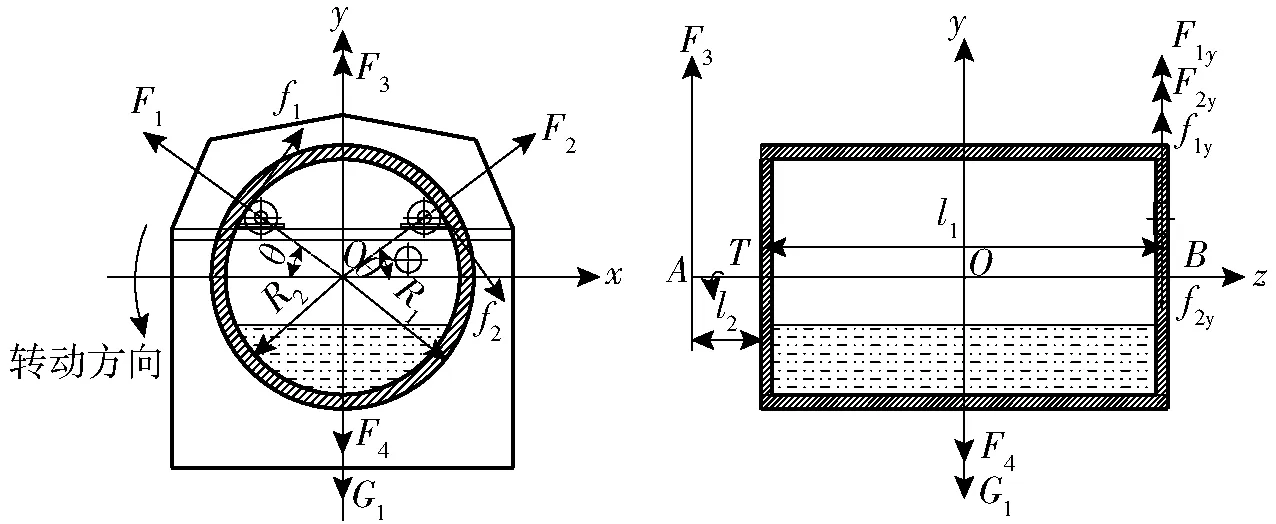
图11 微滤机运转时转鼓的受力分析Fig.11 Force analysis of microscreen drum filter in operation
静止时,由式(1)、(2)可知:在l1、l2、G1、θ不变的情况下,随着过滤的进行,F4逐渐变大,F3、F1、F2也随之变大,这就使得轴承、滚轮支撑轴和滚轮要承受转鼓和水体给其的最大压力,在l1、l2、G1、F4不变的情况下,F1、F2随θ的增大而减小;运转时,随着反冲洗的进行,由式(5)、(6)可知F1、F2除了与θ有关还与动摩擦因数f有关,且F1>F2,从电机和传动能耗角度考虑,应尽可能减小摩擦力对能量的损耗,使得转鼓转动平稳,因此f越小越好,滚轮与转鼓接触面应当光滑。
在上述分析基础上结合转鼓转速(3 r/min)及其同轴度、安装精度等要求,选择能承受较大径向载荷的调心滚子轴承,滚轮支撑轴轴径为5 cm,滚轮材料为塑料,安装角θ为30°,使用摆线针轮减速电机(电机功率P为0.12 kW,转速n为1 420 r/min,速比i1为473),相应的传动方式为直齿圆锥齿轮传动。根据文献[23]中齿轮传动的设计方法得出的齿轮参数如表2所示。
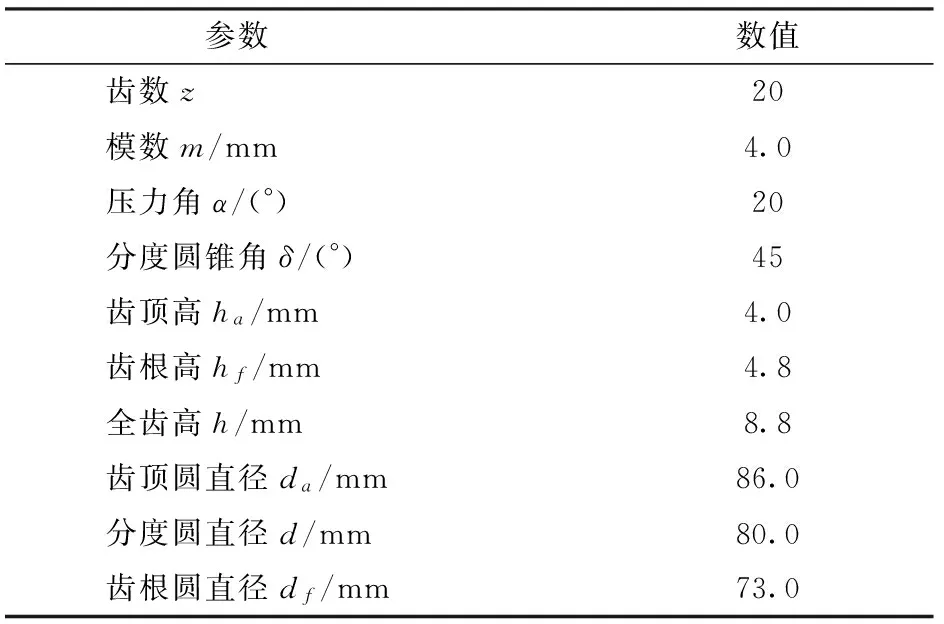
表2 用于驱动微滤机运转的圆锥齿轮参数Tab.2 Bevel gear parameters for driving microscreen drum filter
圆锥齿轮的传动比i2为1∶1,即与减速电动机输出轴相连的主传动轴转速等于转鼓的转速。根据圆轴的抗扭强度条件、扭转时的刚度条件及其安全性,设计的主传动轴参数如表3所示,由轴的两端横截面间的扭转角φ=0.34°可知,结果满足设计要求。

表3 主传动轴参数Tab.3 Main drive shaft parameters
改进后的减速电动机布置及传动方式如图12所示,相比于改进之前,具有电动机能耗低、齿轮传动平稳的优点。
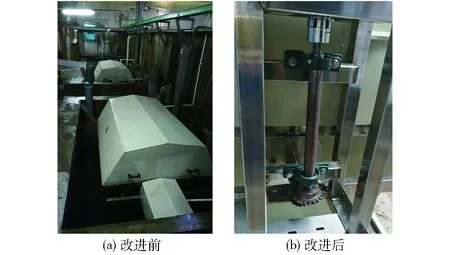
图12 改进前后的减速电动机及传动方式对比Fig.12 Comparison of reducer and transmission mode before and after improvement
4 结论
(1)针对循环水养殖系统中框架式转鼓式微滤机的控制要求,设计了基于西门子S7-200 PLC的多台转鼓式微滤机多模式控制系统,实现了对10台转鼓式微滤机在手动、自动和定时3种运行模式下的控制,对于解决在较为复杂的水产养殖环境中硬逻辑控制电路、控制电器易发生故障、检修不便等问题具有较大的优越性,相比于单台单控,节约了成本,提高了微滤机自动化水平。
(2)多台微滤机多模式控制系统实验结果表明:对于手动模式,可以随时控制减速电动机和反冲洗泵的启停;对于自动模式,减速电动机和反冲洗泵的启停由2个液位开关共同控制,当2个开关均被转鼓内水体触发时,才进行反冲洗作业,当低液位开关恢复常开状态时,反冲洗才停止,且当水位发生故障时,不进行反冲洗;对于定时模式,可以根据水质情况设定反冲洗的时间和频率。
1VAN R J. Waste treatment in recirculating aquaculture systems [J]. Aquacultural Engineering, 2013, 53:49-56.
2FERNANDES P M, PEDERSEN L F, PEDERSEN P B. Daily micro particle distribution of an experimental recirculating aquaculture system—a case study[J]. Aquacultural Engineering, 2014, 60:28-34.
3于涛,钟非,贺锋,等. 基于STELLA的循环水养殖系统池塘总氨氮动态模拟[J/OL].农业机械学报,2013, 44(7):199-203.http:∥www.j-csam.org/ch/reader/view_abstract.aspx?file_no=20130735&flag=1&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2013.07.035.
YU Tao, ZHONG Fei, HE Feng, et al. Dynamic simulation of total ammonia in culture ponds of recirculating aquaculture system based on STELLA model [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7):199-203. (in Chinese)
4FERNANDES P, PEDERSEN L F, PEDERSEN P B. Microscreen effects on water quality in replicated recirculating aquaculture systems [J]. Aquacultural Engineering, 2015, 65:17-26.
5ALI S A. Design and evaluate a drum screen filter driven by undershot waterwheel for aquaculture recirculating systems[J]. Aquacultural Engineering, 2013,54:38-44.
6DOLAN E, MURPHY N, O'HEHIR M. Factors influencing optimal micro-screen drum filter selection for recirculating aquaculture systems[J]. Aquacultural Engineering, 2013, 56:42-50.
7TIMMONS M B, EBELING J M. Recirculating aquaculture [M]. 3rd edition. Ithaca, NY:Ithaca Publishing Company, LLC, 2013.
8LEKANG O I. Aquaculture engineering[M]. 2nd ed. Hoboken, NJ:John Wiley & Sons, Ltd., 2013.
9孟祥宝,黄家怿,谢秋波,等. 基于自动巡航无人驾驶船的水产养殖在线监控技术[J/OL]. 农业机械学报,2015, 46(3):276-281.http:∥www.j-csam.org/ch/reader/view_abstract.aspx?file_no=20150340&flag=1&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.03.040.
MENG Xiangbao, HUANG Jiayi, XIE Qiubo, et al. Online monitoring equipment for aquaculture based on unmanned automatic cruise boat[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):276-281. (in Chinese)
10胡金有,王靖杰,张小栓,等. 水产养殖信息化关键技术研究现状与趋势[J/OL]. 农业机械学报,2015, 46(7):251-263.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150737&flag=1. DOI: 10.6041/j.issn.1000-1298.2015.07.037.
HU Jinyou, WANG Jingjie, ZHANG Xiaoshuan, et al. Research status and development trends of information technologies in aquacultures[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7):251-263. (in Chinese)
11TERJESEN B F, SUMMERFELT S T, NERLAND S, et al. Design, dimensioning, and performance of a research facility for studies on the requirements of fish in RAS environments[J]. Aquacultural Engineering, 2013, 54:49-63.
12洪剑青,赵德安,孙月平,等. 水产养殖自动导航无人明轮船航向的多模自适应控制[J]. 农业工程学报,2017,33(1):95-101.
HONG Jianqing, ZHAO Dean, SUN Yueping, et al. Multi model adaptive control of paddlewheel vehicle’s course in aquaculture[J]. Transactions of the CSAE, 2017, 33(1): 95-101. (in Chinese)
13吴燕翔,胡咏梅,刘雨青. 基于PLC 循环水养殖温控系统的设计[J]. 科学技术与工程,2011, 11(20):4734-4739.
WU Yanxiang, HU Yongmei, LIU Yuqing. The design of recirculating aquaculture temperature control system based on PLC [J]. Science Technology and Engineering, 2011, 11(20):4734-4739. (in Chinese)
14张业韡, 吴凡, 陈翔,等. 基于易控的工业化循环水养殖系统[J]. 渔业现代化,2017,44(1):21-25.
ZHANG Yewei, WU Fan, CHEN Xiang, et al. Industrialized recirculating aquaculture system based on INSPEC[J]. Fishery Modernization, 2017, 44(1):21-25. (in Chinese)
15廖常初. S7-200 PLC编程及应用[M]. 2版. 北京:机械工业出版社,2014.
16SIEMENS. SIMATIC S7-200可编程序控制器系统手册[M]. SIEMENS,2008.
17史兵,赵德安,刘星桥,等.工业化水产养殖智能监控系统设计[J].农业机械学报,2011,42(9):191-196.
SHI Bing, ZHAO Dean, LIU Xingqiao, et al. Design of intelligent monitoring system for aquaculture[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(9): 191-196. (in Chinese)
18颜波,石平.基于物联网的水产养殖智能化监控系统[J/OL]. 农业机械学报, 2014, 45(1):259-265. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140140&flag=1.DOI: 10.6041/j.issn.1000-1298.2014.01.040.
YAN Bo, SHI Ping. Intelligent monitoring system for aquaculture based on internet of things[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1): 259-265. (in Chinese)
19袁凯,庄保陆,倪琦,等. 室内工厂化水产养殖自动投饲系统设计与试验[J]. 农业工程学报,2013,29(3):169-176.
YUAN Kai, ZHUANG Baolu, Ni Qi, et al. Design and experiments of automatic feeding system for indoor industrialization aquaculture[J]. Transactions of the CSAE, 2013, 29(3): 169-176. (in Chinese)
20马从国, 赵德安, 王建国,等. 基于无线传感网络的水产养殖池塘溶解氧智能监控系统[J]. 农业工程学报,2015, 31(7):193-200.
MA Congguo, ZHAO Dean, WANG Jianguo, et al. Intelligent monitoring system for aquaculture dissolved oxygen in pond based on wireless sensor network[J]. Transactions of the CSAE, 2015, 31(7):193-200. (in Chinese)
21蒋建明, 史国栋, 赵德安,等.基于LEACH协议的水产养殖参数智能监控系统[J/OL]. 农业机械学报, 2014, 45(11):286-291.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20141144&flag=1. DOI: 10.6041/j.issn.1000-1298.2014.11.044.
JIANG Jianming, SHI Guodong, ZHAO Dean, et al. Intelligent monitoring system of aquaculture parameters based on LEACH protocol[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(11):286-291. (in Chinese)
22蒋建明,史国栋,李正明,等.基于无线传感器网络的节能型水产养殖自动监控系统[J]. 农业工程学报,2013, 29(13):166-174.
JIANG Jianming, SHI Guodong, LI Zhengming, et al. Energy-efficient automatic monitoring system of aquaculture based on WSN[J]. Transactions of the CSAE, 2013, 29(13): 166-174. (in Chinese)
23濮良贵,陈国定,吴立言. 机械设计[M]. 9版. 北京:高等教育出版社,2013.
