离心匀肥罩式水稻地表变量撒肥机设计与试验
2018-04-02施印炎汪小旵MORICE李成光丁为民
施印炎 陈 满 汪小旵,3 MORICE O O 李成光 丁为民,3
(1.南京农业大学工学院, 南京 210031; 2.农业部南京农业机械化研究所, 南京 210014;3.江苏省现代设施农业技术与装备工程实验室, 南京 210031)
0 引言
作为主要粮食作物之一,水稻的合理施肥能够有效促进生长,提高相应的生物量和产量[1-3]。变量施肥作为合理分配肥料养分的有效手段之一,成为实施精确农业的一个重要环节。水稻作物因其特殊的水田生长模式,大部分施肥方式仍停留在人工作业,耗时、费力、不均匀,急需提高水稻施肥作业机械化水平[4]。大幅宽圆盘式变量撒肥机提高了施肥工作效率和肥料利用率,减少了人工投入,降低了生产成本,成为水稻地表追肥的主要作业方式[5-6]。
大面积农场种植模式的欧美等发达国家,早在20世纪已经对离心式撒肥机展开大量的研究[7-10]。OLIESLAGERS等[11]研究了出肥孔口位置和圆盘转速等结构参数对圆盘式撒肥机撒肥分布的影响,建立肥料颗粒运动模型并设计了模型控制系统,通过验证对比试验证明数学模型的有效性;CAMPELL等[12]设计了一种基于液压流量比例阀控制的双圆盘撒肥机,对采用开、闭环控制系统的执行机构分别进行不同施肥量的排肥性能试验,验证控制系统的准确性和颗粒分布均匀性;COETZEE等[13]通过建立果园离心式施肥机的离散元仿真模型,研究孔口流量、叶片倾角等结构参数对撒肥一致性的影响,试验表明离散单元法(Discrete element method,DEM)仿真模型具有很好的预测效果。近年来,国内对离心圆盘式施肥机研究相继有了一定的成果[14-16]。陈书法等[17]为解决水田变量撒肥技术相对落后的问题,设计了一种高地隙自走式变量撒肥机,研究了整机关键结构参数以及变量控制系统,通过场地和田间试验验证整机工作性能;吕金庆等[18]针对撒肥机抛撒不均匀问题,设计了一种锥盘叶片偏置式撒肥装置,通过旋转正交试验对撒肥装置结构参数进行优化,满足马铃薯撒肥作业最佳要求;胡永光等[19]设计了一种适用于茶园的偏置式窄行距撒肥离心盘,利用EDEM软件建立离散元仿真模型,通过虚拟试验分析优化工作参数、台架试验验证回归模型的预测精度。目前已开展的对离心撒肥机的研究主要集中在装备的结构设计以及参数优化对撒肥性能的影响,对变量控制系统研究主要参考槽轮式基于处方图技术的精准变量施肥,缺乏基于传感器和水稻实时生长信息的变量均匀撒肥控制技术。
本文参考课题组研制的基于光谱技术的冬小麦精准变量追肥机[20-21],针对华南稻麦轮作区少压损、大宽幅、高效率、低成本等水稻地表施肥农艺要求,设计一种基于水稻实时生长信息的双圆盘离心匀肥罩式地表变量撒肥机。主要对撒肥机关键结构参数进行设计,研究分析检测、控制、决策系统,并通过试验验证撒肥性能,寻求最优的撒肥作业工作参数组合,实现单次轨迹撒肥有效幅宽大于24 m的水稻高效、准确、均匀撒肥。
1 整机结构与工作原理
1.1 整机结构
基于光谱技术的双圆盘离心匀肥罩式水稻地表变量撒肥机整体结构如图1所示,主要由光谱传感器、无线通信系统、车控制终端(CPU)、行走系统、撒肥装置、控制系统等部件组成,整机主要技术参数如表1所示。

图1 离心式变量撒肥机整机结构图Fig.1 Structure diagram of centrifugal variable-rate fertilizer spreader1.光谱传感器 2.车速传感器 3.车载CPU 4.控制系统 5.行走系统 6.传动系统 7.肥箱 8.撒肥盘
1.2 工作原理
水稻地表变量撒肥机为拖拉机三点悬挂式牵引,PTO驱动一对反向撒肥圆盘,单次轨迹撒肥有效幅宽大于24 m,通过闭环反馈系统分别调整圆盘转速和撒肥开度,自动化程度高,撒肥分布均匀,有效提高生产效率和肥料利用率,适用于大规模稻麦轮作区现代化农业种植。撒肥过程中,无线串口模块将Greenseeker光谱检测系统实时获取的水稻冠层NDVI值传输给车载控制终端,运行设置的变量施肥专家决策系统,基于优化的Ruan模型生成实时目标需肥量,结合传感器反馈的当前整机行走速度、圆盘转速以及肥箱开度信息,经决策系统指导核心控制器(STM32单片机)驱动步进电动机控制排肥开度,在线调整作物实时施肥量,实现相对意义上的水稻精准变量施肥。

表1 主要技术参数Tab.1 Technical parameters of fertilizer spreader
2 撒肥装置结构设计
2.1 撒肥圆盘结构设计
撒肥圆盘作为离心式撒肥机的核心部件,主要由撒肥盘、叶片、匀肥罩等组成,如图2a所示。根据撒肥机结构尺寸,设计撒肥圆盘直径为620 mm,为增大撒肥有效幅宽,设计截面为锥形,锥角α范围0°~10°;选用常见的双撒肥叶片布置,互呈180°,与圆锥对心母线的夹角(叶片倾角)β可以通过紧定螺钉调节,叶片倾角β一般取6°~20°[17];结合上述锥形撒肥圆盘直径和叶片分布,设计的匀肥罩为柱形罩底部开口分料,其直径240 mm(厚5 mm),高80 mm,开口高度45 mm,位于两叶片中心位置,颗粒肥料在离心力作用下不断地从匀肥罩出料口流出,被依次到达的撒肥叶片抛洒出去,有助于均匀撒肥。

图2 撒肥圆盘和肥量调节装置结构图Fig.2 Structure diagrams of centrifugal disc and fertilizer regulating device1.叶片 2.匀肥出口 3.匀肥罩 4.圆盘 5.齿轮齿条机构 6.步进电动机 7.连杆 8.动盘 9.定盘
2.2 撒肥量调节机构设计
施肥量调节机构作为变量撒肥机的关键部件,其结构如图2b所示,主要包括步进电动机、齿轮齿条机构、连杆、动定圆盘、角位移感器、限位行程开关等零部件。根据下位机决策的目标施肥量信息,通过控制步进电动机驱动齿条连杆机构调节由动盘和定盘构成的下料口相互位置,从而控制下肥口大小(流量0~500 g/s),调节排肥流量。DELIXI LXJM1-8108型限位开关与上位机协调工作控制动盘的极限位置角度,即排肥量最大、最小值;WDD35D-4 5k型角度位移传感器直接检测动盘当前位置转角,换算为即时排肥流量,实时传送至车载CPU人机交互界面显示;选用常见的控制相对简单而性能准确可靠的57HBP76AL4型步进电动机,额定电流3 A,输入直流电压10~48 V,静扭矩1.5 N·m,歩距角1.8°,配备相应的HYQD40-5742型数字式驱动器。
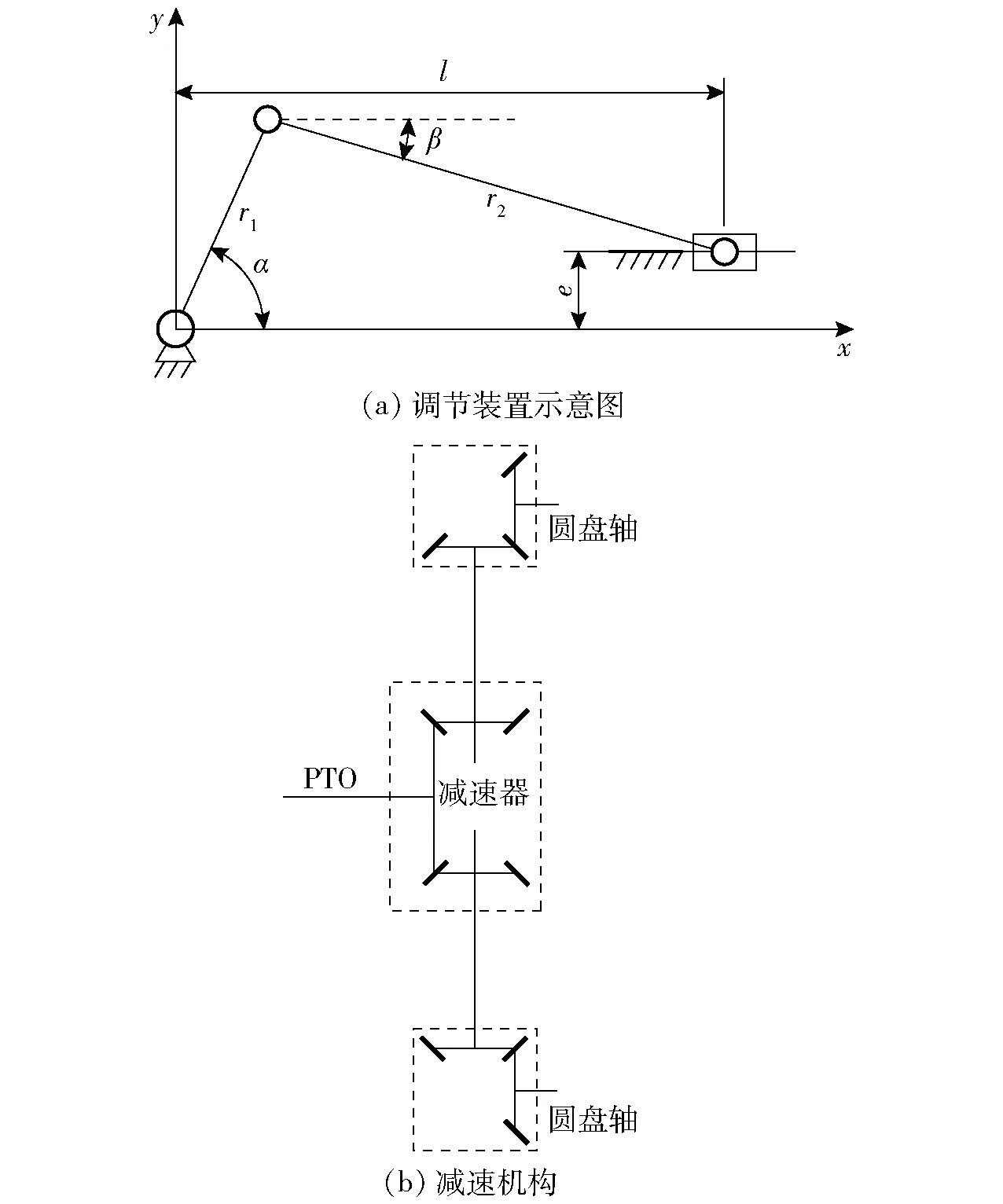
图3 肥量调节装置与减速机构示意图Fig.3 Schematic diagrams of fertilizer regulating device and retarding mechanism
根据撒肥量调节装置工作原理,运动分析时将其简化为偏置式曲柄滑块机构[22],如图3a所示,建立坐标系。图中e为偏心距,mm;r1为曲柄长度,mm;r2为连杆长度,mm;l为滑块移动距离,mm;α为曲柄转角,(°);β为连杆转角,(°)。由运动分析图可知,滑块移动距离l为
l=r1cosα+r2cosβ
(1)
对时间t求导,得滑块移动速度
(2)
由图可得r1sinα=r2sinβ+e,对时间t求导得
(3)
(4)
在已知滑块速度v或位移l的情况下可以反演计算出曲柄的角速度ω1,从而得出动盘转角。根据机械原理,齿轮齿条传动机构中齿条的移动速度为
(5)
式中d——齿轮分度圆直径,mm
n1——曲柄转速
2.3 圆盘驱动装置和肥箱设计
离心式撒肥机整机驱动力来自牵引拖拉机PTO输出轴,通过二级锥齿轮减速器将驱动力传递至两撒肥圆盘转轴,转向相反,根据理论力学知识,通过相应的传动比计算出圆盘转速,传动路线如图3b所示。撒肥机牵引拖拉机动力参考文献[23]中的输出功率经验公式来选取。
为了减少停车装肥次数,提高撒肥机单次撒肥效率,设计的肥量总容积为1 500 L,左右相互独立,肥箱形状为回字形倒四棱柱,且增加过滤网,防止块状肥料和杂质进入肥箱,增强颗粒肥料的流动性,降低堵塞率。
3 控制系统设计
3.1 光谱检测装置设计
基于传感器的离心式水稻变量施肥机根据采集的作物冠层归一化植被指数(NDVI)进行施肥决策。光谱采集检测系统主要由6个相互间隔0.4 m的GreenSeeker传感器、1个信号协调器Interface Module、12 V电源和高度可调支架组成,以保证传感器光源距离作物冠层0.8~1.2 m(图1)。系统以主动遥感的方式(红光波段671±6 nm、近红外光波段780±6 nm)将采集的水稻冠层生长信息光信号转换为通过CAN总线传输的电信号至协调器,数据经过无线串口通信模块E61-TTL-1W远程发送给车载CPU,进行施肥决策。
作为整个施肥过程最基本的环节,光谱检测系统采集数据的准确性和代表性尤为重要,采样频率是关键。样本量越大,数据越准确越具有代表性,但是数据处理对系统软硬件要求越高;样本量越小,数据处理越快,但是无法客观反映区域作物长势空间差异性。GreenSeekerRT200采样频率范围f在0.7~3.33 Hz之间,在能够保证采样数据一定准确性(NDVI值变异系数Cv)、不影响系统硬件性能的情况下,采用克里斯琴森均匀系数评价采样频率对NDVI值变异系数的影响,确定最佳采样频率[21]。采样试验如图4所示,结果如表2所示,克里斯琴森均匀系数计算式为
(6)
式中n——样本数量
fi——第i个样本NDVI值

图4 光谱数据采样试验Fig.4 Picture of sampling test for spectrum data
表2样本分布均匀系数和变异系数与采样频率的关系
Tab.2Relationshipbetweensamplingfrequencyanddistributionuniformitycoefficientandvariationcoefficient %

采样频率f/Hz参数试验地块人工撒肥传统机撒变量机撒0.8Cu92.3490.8693.6493.7292.1691.7594.2691.8792.43Cv15.7516.3414.2914.7613.6415.0710.7512.4314.821.2Cu91.8491.3190.6792.4691.7293.5393.0793.7291.67Cv14.3815.7614.2514.5313.7414.2613.2514.0315.071.6Cu90.4891.5290.0391.5490.9691.0392.4191.7292.64Cv14.0613.8714.3513.2712.4614.8212.0811.5613.722.0Cu89.4690.7288.3791.5390.4691.7292.4890.3791.05Cv11.5212.8714.6912.7513.0912.9110.8512.0611.752.4Cu87.5186.7288.9189.7790.3589.7190.2891.0689.43Cv10.8412.6711.7311.6412.8110.9211.8910.7514.862.8Cu89.7285.4984.6189.7886.3488.9691.7290.4186.75Cv7.689.7211.5610.4812.689.756.6710.819.76
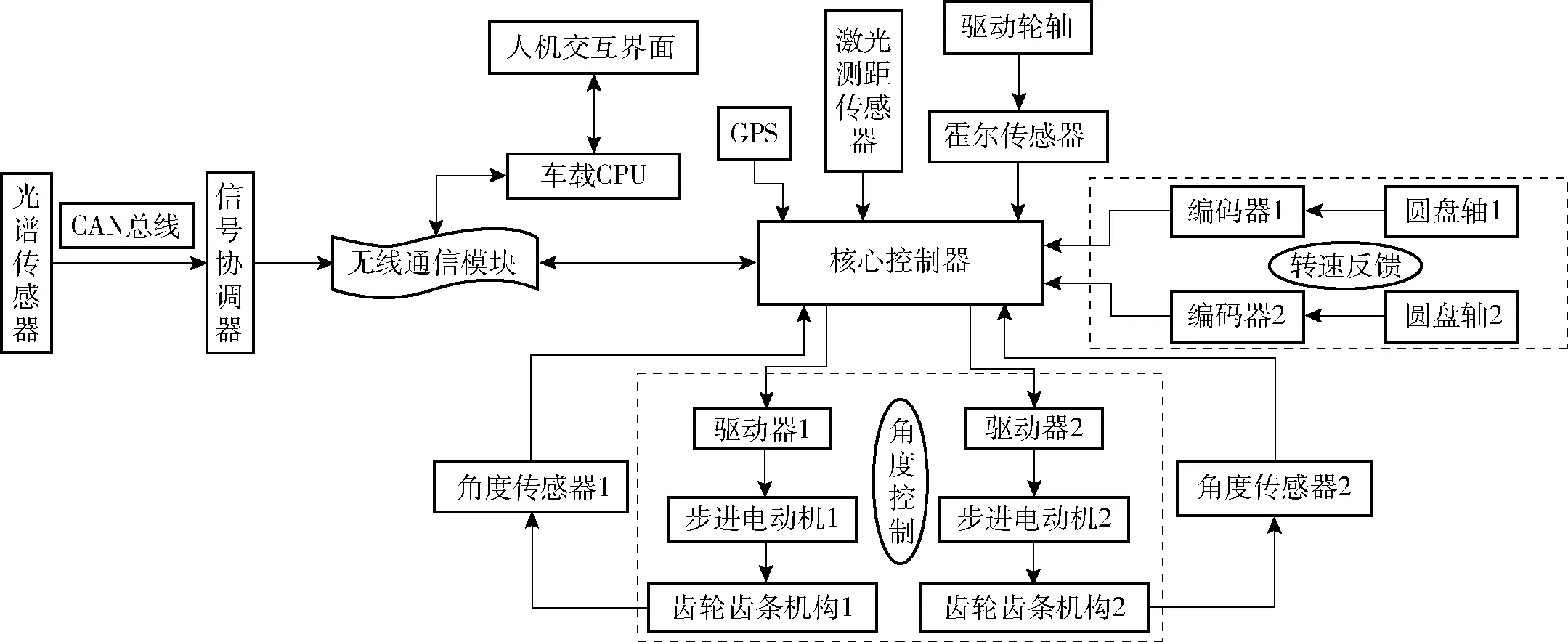
图5 变量撒肥机控制系统框图Fig.5 Block diagram of control system for variable-rate fertilizer spreader
分别对人工撒肥、传统施肥机均衡撒肥、变量施肥机按需撒肥3个不同的对照区进行随机采样试验,由表2可以看出,样本分布均匀系数最大为94.26%(变量机撒区)、最小为84.61%(人工撒肥区),变异系数最大值为16.34%(人工撒肥区)、最小值为6.67%(变量机撒区),说明采样频率f对分布均匀系数影响不大,而对变异系数影响显著。根据表中数据分析,为保证3个不同的对照区样本分布均匀系数大于等于90%,变异系数小于等于15%,选取系统采样频率f=1.6 Hz。
3.2 控制系统硬件设计
控制系统作为离心式水稻变量施肥机核心,主要由硬件和软件组成,完成传感器信息采集、通信、存储,对执行机构的实时控制以及人机交互界面的显示。控制系统硬件部分如图5所示,主要包括电源、稳压模块、GPS模块、传感器模块、无线通信模块、核心控制器模块、驱动器模块、车载控制终端、人机交互模块等。
电源选用24 V、36 A·h的锂电池为整个控制系统独立供电,通过稳压模块分配到不同的用电元件,不受外在因素干扰;核心控制器选用STM32F103系列作为主控制芯片,接收通过无线通信模块E61-TTL-1W传输的光谱数据进行解析决策,车载控制终端Windows操作系统计算出水稻实时目标需肥量,结合霍尔传感器采集的拖拉机车速、编码器采集的双圆盘转速、角度传感器采集的肥箱开度反馈信息,指导核心控制器PWM控制电动机驱动模块,从而调节肥箱开口角度,控制施肥量。GPS模块ATK-NEO-6M-V23用于实时定位当前施肥机所处的作业位置,可辅助完成车速检测;人机交互显示模块选用基于ARM的WAT-T8060-104组态多功能一体机,10.4 in TFTLCD显示屏完成采集信息的显示和存储,发送相应的作业参数指令。
3.3 控制系统软件设计
控制系统程序采用C语言在KeilμVision5开发环境中进行编程,由主程序调用若干相应的模块子程序实现整个施肥控制过程,控制流程如图6所示。系统供电,施肥作业开始后,GPS子程序被调用获取当前位置信息,光谱信息检测子程序被调用获取水稻实时生长信息,系统调用施肥模型子程序计算目标需肥量,结合调用的相应传感器模块子程序监测信息(车速、圆盘转速、肥箱开度),根据决策模型确定当前有效作业幅宽对应的撒肥面积所需的目标施肥量,主程序根据目标施肥量调用步进电动机驱动器模块子程序,控制步进电动机调节撒肥量大小;实时位置、光谱数据、行走速度、肥箱开度、圆盘转速、施肥量等信息通过人机交互模块子程序显示和存储;判断模块子程序连续监测撒肥动作是否继续,如需继续则重复以上工作循环。
4 性能试验
为评价变量撒肥机撒肥分布均匀性和施肥量准确性,对变量撒肥机进行性能试验。
4.1 试验条件
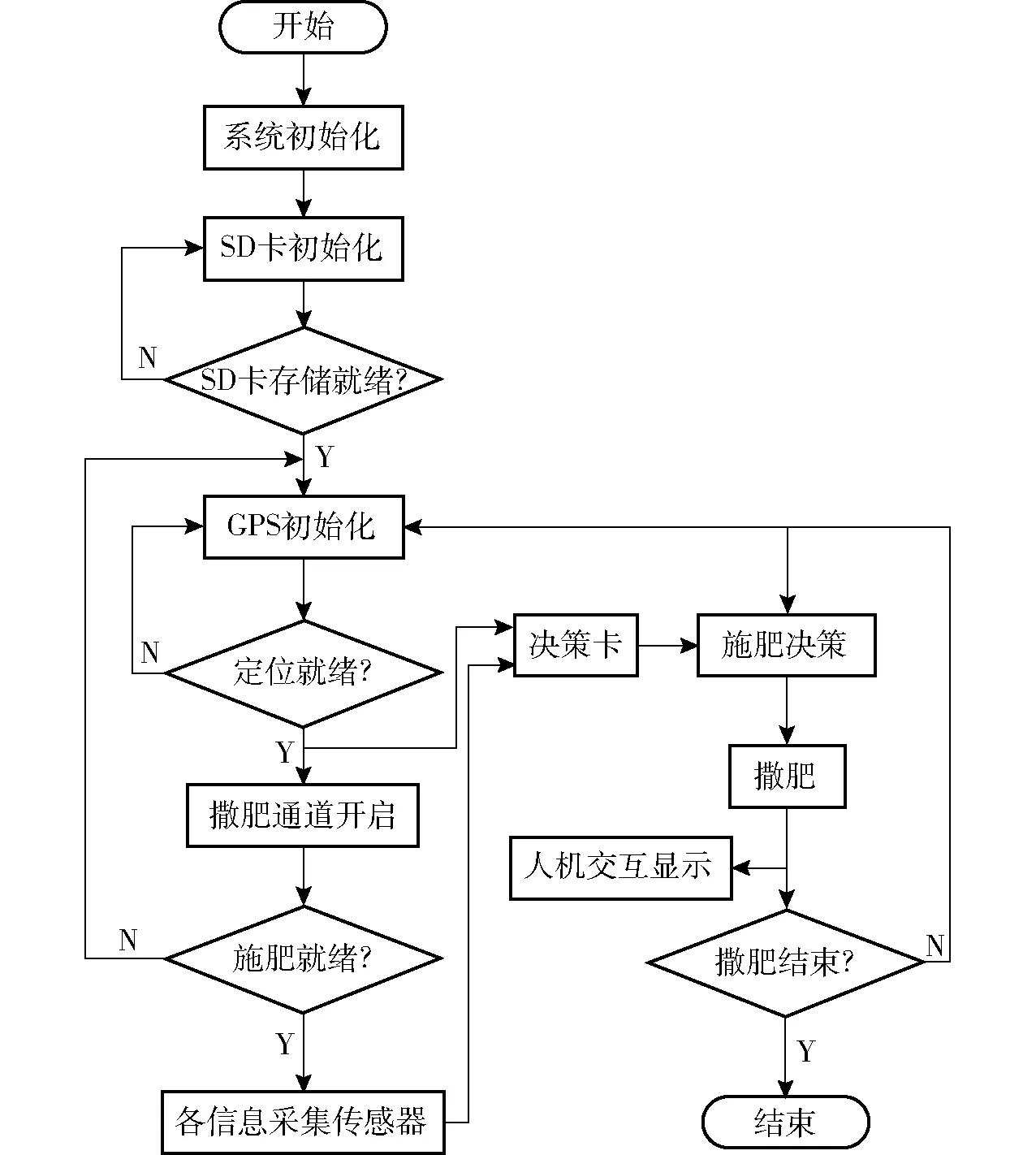
图6 控制系统流程图Fig.6 Flowchart of control system
试验于2017年4月在江苏盐城盐海拖拉机制造有限公司试验基地进行,天气晴,气温15~25℃,风速小于2.0 m/s(符合ASAE标准允许试验风速),地面相对平整,试验地面积 500 m2,空气相对湿度 42%,土壤绝对含水率 21%;试验材料为南方常用的复合颗粒肥料,南京正美实农化有限公司生产,含水率为1.03%,颗粒直径均值为4.02 mm;测试方法及指标参照GB/T 5262—2008《农业机械试验条件测定方法的一般规定》以及ISO 5690和ASAE S314.2所规定的离心式撒肥机试验方法,图7为撒肥机性能试验图。

图7 撒肥性能试验Fig.7 Performance test of spreading fertilizer
4.2 试验方法
撒肥作业时,在试验区域内(30 m×14 m)铺放塑料薄膜以减少肥料浪费,在二维矩阵收集盒内壁粘贴适量柔软棉布料以降低因肥料弹跳造成的试验误差。按15×10矩阵摆放收集盒(50.8 cm×40.6 cm×10.2 cm)150个,列间隔1.5 m,行间隔0.8 m,撒肥机以一定的作业速度从横向对称中心穿过后,称量各收集盒内肥料颗粒(装袋标号保存),用于表征变量撒肥颗粒分布。每次试验调整肥箱肥料大于总容量的50%并校准整机进入相应的工作状态,变量撒肥机在稳定区启动后进入测定区(收集盒区域),最终有一段停止区,以保证测定区域试验准确性。
针对变量撒肥机施肥质量和施肥可靠性要求,选择影响变量撒肥效果的主要作业参数:出口排肥流量、撒肥圆盘转速、整机前进速度为试验因素,定点收集试验区域内肥料颗粒,以撒肥有效幅宽内颗粒分布变异系数为评价指标1,表征变量施肥机撒肥分布均匀性,以单位面积施肥量误差为评价指标2,表征变量撒肥机施肥量准确性。根据设计方案,参考文献[15,18]中变量撒肥装备性能作业参数,施肥机械作业速度v1范围为0.6~1.8 m/s,圆盘转速范围为300~1 000 r/min,排肥流量q范围为0~500 g/s,在实际变量施肥作业的基础上,选取合适的因素水平,设计三因素三水平正交试验(L9(34)),因素水平如表3所示。分别计算肥料颗粒分布变异系数和单位面积撒肥量误差评价变量施肥机撒肥性能,每组试验重复3次取平均值,试验指标计算公式为
(7)
式中γ——单位面积撒肥量误差,%
M——试验区域内肥料颗粒总质量,g
S——试验区域面积,m2
Q——理论目标施肥量,g/m2
(8)
其中
式中Cv——颗粒分布变异系数,%
SD——肥料颗粒质量标准差,g

Xi——第i个收集盒肥料颗粒质量,g
m——收集盒数量
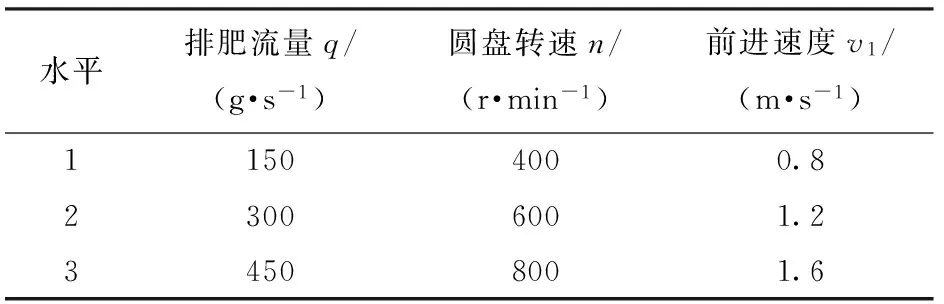
表3 正交试验因素水平Tab.3 Factors and levels of orthogonal test
4.3 试验结果与分析
上述性能正交试验方案与结果如表4所示,A、B、C分别为q、n、v1水平值。
由表4中极差分析可知,对于不同的评价指标,影响因素的显著性不同。评价指标以撒肥颗粒分布变异系数Cv优先时,影响Cv的主次顺序为A、B、C,选择较优的水平组合为A1B3C2,颗粒分布变异系数Cv随着因素A的增大而增大,随着因素B的增大而减小,随着因素C的增大呈现先减小后增大的趋势;评价指标以撒肥量误差γ优先时,影响γ的主次顺序为B、A、C,选择较优的水平组合为A2B2C2,撒肥量误差γ随着A、B、C各因素的增大都呈现出先减小后增大的趋势。
方差分析结果见表5,由Cv的方差分析可以看出FA>FB>FC,表明因素A对变异系数Cv影响最为显著,因素B影响次之,因素C影响最小(P<0.05);由γ的方差分析可以看出FB>FA>FC,表明
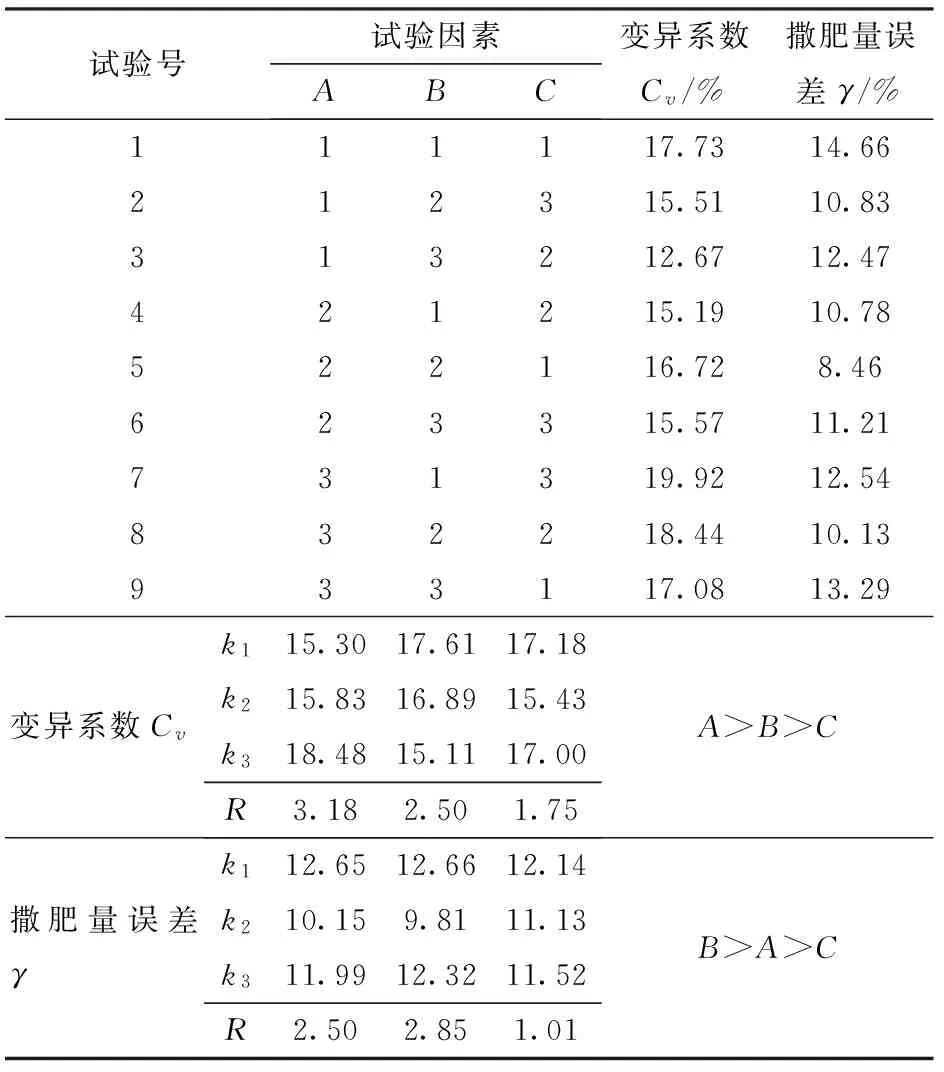
表4 正交试验设计与结果Tab.4 Results of orthogonal test
因素B对撒肥量误差γ影响最为显著,因素A影响次之,因素C影响最小(P<0.05),与极差分析结果一致。综合极差分析和方差分析结果,根据不同的评价指标,选择的最优因素水平组合不同。Cv优先时,选取A1B3C2组合最优,Cv=12.67%,γ=12.47%;γ优先时,选取A2B2C2组合最优(未出现在正交试验方案中),另外增加一组试验方案A2B2C2,Cv=13.82%,γ=9.54%。比较不同评价指标优先时最佳组合方案,参考相关标准对撒肥机械作业要求[15](Cv≤15%,γ≤10%),选取相对更优的因素水平组合A2B2C2,即排肥流量q=300 g/s,圆盘转速n=600 r/min,行走速度v1=1.2 m/s,施肥机整机撒肥性能最优。

表5 方差分析Tab.5 Analysis of variance
注:** 为极显著,*为显著。
4.4 田间试验
为了验证上述正交性能试验最佳因素水平组合的准确性,提高变量撒肥机撒肥性能,于2017年6月在江苏省东台金满穗农业发展有限公司水稻试验基地进行田间试验,天气晴,气温25~36℃,风速小于2.0 m/s,试验地面积1.3 hm2,空气相对湿度31%,试验方法与4.2节一致,图8所示为撒肥机田间试验。

图8 田间验证试验Fig.8 Picture of field validation test
试验过程中,调节撒肥机工作参数到最佳水平:排肥流量q=300 g/s,圆盘转速n=600 r/min,行走速度v1=1.2 m/s,进行6组重复性试验(6块试验地),试验结果如表6所示。试验结果表明,田间撒肥颗粒分布变异系数Cv最大为15.71%,最小为12.13%,均值为13.97%,与性能试验误差均值为9.19%;田间撒肥量误差γ最大值为10.76%,最小值为8.24%,均值为9.46%,与性能试验误差均值为9.25%。评价指标满足相关规定对施肥机械作业要求[24],表明设计的离心式变量施肥机提高了撒肥分布均匀性和施肥量准确性,为离心式撒肥机传统的经验式施肥提供了一定的理论基础。
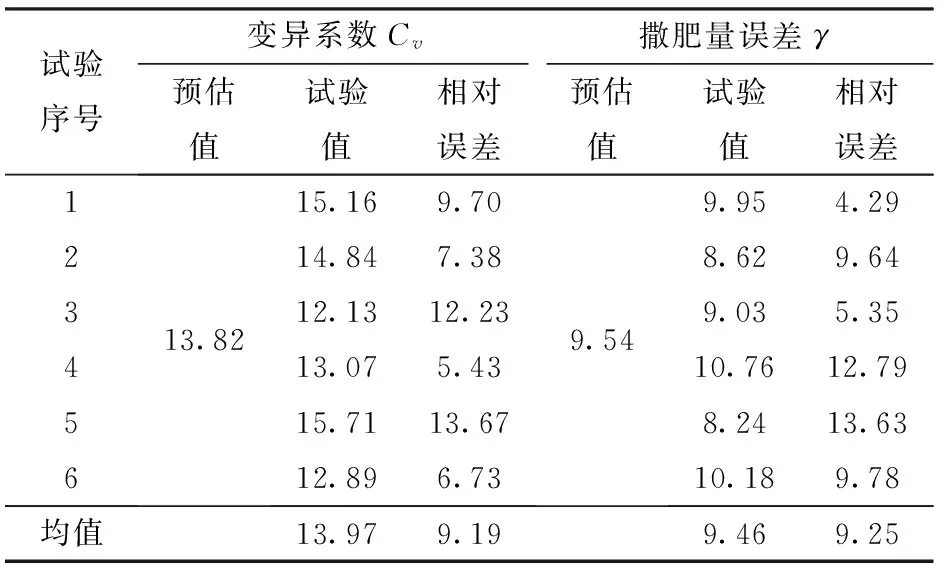
表6 田间试验结果Tab.6 Results of field test %
5 结论
(1)针对目前水稻变量追肥作业均匀性、准确性要求,设计了一种基于传感器的双圆盘离心匀肥罩式水稻地表变量施肥机,开发配套的变量施肥作业控制系统,开展相应的排肥性能试验,实现水稻高效、准确、均匀变量撒肥。
(2)以STM32F103为核心控制器,集成各传感器数据信息,协调反馈信息,结合施肥策略模型,响应目标需肥量,经过决策系统指导步进电动机控制排肥开度,在线调整作物实时施肥量,实现相对意义上的水稻精准变量施肥。
(3)撒肥性能试验结果表明,撒肥机作业参数排肥流量A、圆盘转速B、行进速度C对于不同的评价指标的影响显著性不同。以颗粒分布变异系数Cv为评价指标,影响主次因素为A、B、C,最佳因素水平组合是A1B3C2;以施肥量相对误差γ为评价指标,影响主次因素为B、A、C,最佳因素水平组合是A1B3C2;比较不同最佳组合方案,选取相对更优的因素水平组合A2B2C2,即q=300 g/s,n=600 r/min,v1=1.2 m/s时,Cv=13.82%,γ=9.54%,施肥机整机撒肥性能最优。
(4)田间试验结果表明:在最优的撒肥作业参数组合条件下,变异系数Cv均值为13.97%,与性能试验误差均值为9.19%;撒肥量误差γ均值为9.46%,与性能试验误差均值为9.25%。满足国标相关规定对施肥机械作业要求,表明设计的离心式变量施肥机能够提高撒肥分布均匀性和施肥量准确性,为离心式撒肥机传统经验式施肥提供了一定技术支持。
1贺志远,朱艳,李艳大,等. 中国南方双季稻氮营养指数及产量估算模型研究[J].南京农业大学学报, 2017,40(1): 11-19.
HE Zhiyuan, ZHU Yan, LI Yanda, et al. Study on estimation model for nitrogen nutrition index and yield on double cropping rice in southern China [J].Journal of Nanjing Agricultural University,2017, 40(1):11-19. (in Chinese)
2左兴健,武广伟,付卫强,等. 风送式水稻侧深精准施肥装置的设计与试验[J]. 农业工程学报,2016,32(3):14-21.
ZUO Xingjian, WU Guangwei, FU Weiqiang, et al. Design and experiment on air-blast rice side deep precision fertilization device [J]. Transactions of the CSAE, 2016, 32(3): 14-21. (in Chinese)
3MIYOKO W, TOMOKO Y, KAZUYOSHI S, et al. Distribution of anammox bacteria in a free-water-surface constructed wetland with wild rice (Zizanialatifolia) [J]. Ecological Engineering, 2015, 81: 165-172.
4张银平,杜瑞成,刁培松,等. 正反转组合式水稻宽苗带灭茬播种机设计与试验[J]. 农业工程学报,2017,33(3):7-13.
ZHANG Yinping, DU Ruicheng, DIAO Peisong, et al. Design and experiment of wide band seeding rice seeder with reversed stubble cleaning and-anti-blocking [J]. Transactions of the CSAE, 2017, 33(3): 7-13. (in Chinese)
5马晓蕾,范广博,李永玉,等.精准施肥决策模型与数据库系统[J].农业机械学报, 2011, 42(5):193-197.
MA Xiaolei, FAN Guangbo, LI Yongyu,et al. Establishment of precision fertilization decision-making model and database system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(5): 193-197. (in Chinese)
6郎春玲, 王金武, 王金峰, 等. 深施型液态肥变量施肥控制系统 [J/OL]. 农业机械学报, 2013, 44(2): 43-47.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130209&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.02.009.
LANG Chunling, WANG Jinwu, WANG Jinfeng, et al. Variable fertilizer control system for deep-fertilization liquid fertilizer applicator [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 43-47. (in Chinese)
7VILLETTE S, COINTAULT F, PIRON E, et al. Centrifugal spreading: an analytical model for the motion of fertiliser particles on a spinning disc [J]. Biosystems Engineering, 2005, 92(2):157-164.
8LIEDEKERKE P V. Study of the granular fertilizers and the centrifugal spreaderusing discrete element method (DEM) simulations [D]. Leuven: Katholieke Universiteit Leuven,2007.
9RAVINDER K T. Effect of vane shape and fertilizer product on spread uniformity using a dual-disc spinner spreader[D]. Alabama:Auburn University,2014.
10FULTON J P, SHEARER S A, HIGGINS S F, et al. Performance assessment and model development of a variable-rate, spinner-disc fertilizer applicator[J]. Transactions of the ASAE, 2001, 44(5):1071-1081.
11OLIESLAGERS R,RAMON H,BAERDEMAEKER J D. Calculation of fertilizer distribution patterns from a spinning disc spreader by means of a simulation model [J]. Journal of Agricultural Engineering Research, 1996, 63(2):137-152.
12CAMPBELL C M, FULTON J P, MCDONALD T P, et al. Spinner-disc technology to enhance the application of poultry litter [J]. Applied Engineering in Agriculture, 2010, 26 (5): 759-767.
13COETZEE C J, LOMBARD S G. Discrete element method modelling of a centrifugal fertiliser spreader [J]. Biosystems Engineering, 2011, 109(4): 308-325.
14张睿,王秀,周建军,等.肥料抛撒机抛撒系统幅宽控制技术[J/OL]. 农业机械学报,2012, 43(增刊):39-43.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2012s08&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2012.S0.008.
ZHANG Rui, WANG Xiu, ZHOU Jianjun, et al.Breadth control of scatter system for fertilizer spreader[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(Supp.):39-43. (in Chinese)
15董向前,宋建农,张军奎,等. 锥盘式颗粒肥撒施机构抛撒性能分析与试验[J]. 农业工程学报,2013,29(19):33-40.
DONG Xiangqian, SONG Jiannong, ZHANG Junkui, et al. Working performance and experiment on granular fertilizer spreader with cone disk[J]. Transactions of the CSAE, 2013, 29(19): 33-40. (in Chinese)
16张睿,王秀,赵春江,等. 链条输送式变量施肥抛撒机的设计与试验[J]. 农业工程学报,2012,28(6):20-25.
ZHANG Rui, WANG Xiu, ZHAO Chunjiang, et al. Design and experiment of variable rate fertilizer spreader with conveyor chain[J]. Transactions of the CSAE, 2012, 28(6): 20-25. (in Chinese)
17陈书法,张石平,孙星钊,等. 水田高地隙自走式变量撒肥机设计与试验[J]. 农业工程学报,2012,28(11):16-21.
CHEN Shufa, ZHANG Shiping, SUN Xingzhao, et al. Design and experiment of self-propelled high-ground-clearance spreader for paddy variable-rate fertilization[J]. Transactions of the CSAE, 2012, 28(11): 16-21. (in Chinese)
18吕金庆,尚琴琴,杨颖,等.锥盘式撒肥装置的性能分析与试验[J]. 农业工程学报,2016, 32(11): 16-24.
LÜ Jinqing, SHANG Qinqin, YANG Ying, et al.Performance analysis and experiment on granular fertilizer spreader with cone disc[J]. Transactions of the CSAE, 2016, 32(11): 16-24. (in Chinese)
19胡永光,杨叶成,肖宏儒,等. 茶园施肥机离心撒肥过程仿真与参数优化[J/OL]. 农业机械学报,2016,47(5):77-82.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160511&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.05.011.
HU Yongguang, YANG Yecheng, XIAO Hongru, et al.Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016, 47(5):77-82. (in Chinese)
20施印炎,陈满,汪小旵,等. 稻麦精准变量施肥机排肥性能分析与试验[J/OL]. 农业机械学报, 2017,48(7):97-103.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170712&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.07.012.
SHI Yinyan, CHEN Man, WANG Xiaochan, et al. Analysis and experiment of fertilizing performance for precision fertilizer applicator in rice and wheat [J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017, 48 (7):97-103.(in Chinese)
21陈满, 施印炎, 汪小旵, 等. 冬小麦精准追肥机专家决策系统[J/OL]. 农业机械学报,2015,46(7):17-22. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150703&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.07.003.
CHEN Man, SHI Yinyan, WANG Xiaochan, et al. Expert decision system of variable nitrogen application in winter wheat[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):17-22. (in Chinese)
22耿其东,方志国. 偏置式曲柄滑块机构仿真与运动分析[J]. 机械工程与自动化, 2011,166(3): 49-51.
GENG Qidong, FANG Zhiguo. Simulation and kinetic characteristic analysis of deflection slider-crank mechanism[J].Mechanical Engineering and Automation,2011,166(3): 49-51.(in Chinese)
23付乾坤,荐世春,贾洪雷,等. 玉米灭茬起垄施肥播种机的设计与试验[J]. 农业工程学报,2016,32(4):9-16.
FU Qiankun, JIAN Shichun,JIA Honglei, et al.Design and experiment on maize stubble cleaning fertilization ridging seeder[J].Transactions of the CSAE,2016,32(4):9-16.(in Chinese)
24NY/T1003—2006施肥机械质量评价技术规范[S]. 2006.
