基于图像处理的电动自行车逆行检测技术研究
2018-04-02彭梓晗程佳馨魏筱萌
彭梓晗 程佳馨 魏筱萌
(南京农业大学工学院农机系,中国 南京 210031)
0 研究背景
电动自行车逆行是重大交通事故的罪魁祸首,然而道路上缺少对其监管的装置,致使其驾驶者产生侥幸心理。而人工监管耗时费力,因而设置对非机动车如电动自行车的监管装置势在必行,只有实现和机动车类似的违章抓拍,才能从根本上解决。
1 基于视频的交通事件检测
1.1 交通事件监测系统概述
交通事件监测系统有如下几个流程:运动车辆自动检测、运动车辆自动跟踪、交通事件判定、异常交通事件发生自动报警。核心部分是对采集的交通监测视频进行图像处理,通过对目标的检测与跟踪,得到其行驶轨迹,再利用算法对车辆违章行为进行判定,从而达到对车辆违章事件的监测。
1.2 背景提取——混合高斯背景模型
混合高斯模型是一个可以用来表示在总体分布中含有K个子分布的概率模型,其中K取值为3到5。K值越大,处理得到的检测效果越好,但处理所需时间也越长。其概率密度函数可以用K 个高斯函数表示:

获得新的图像后,将当前图像像素和混合高斯模型中K 个高斯分布进行匹配,若满足下式,则认为匹配成功。

以下为通过高斯混合模型提取出来的背景和前景:

图1 视频前景图

图2 视频背景图
1.3 运动目标检测方法
1.3.1背 景 差 分 法
该算法是利用视频图像中的当前帧与背景参考模型比较来检测运动前景的一种方法。设定BGi为背景图像,Fi为当前帧图像,差分图像 Di,则:

为RiDi(x,y)二值化后的图像。对 Ri进行连通分析,当此连通区域的面积大于设定阈值T,就认为是检测目标。
1.3.2帧 间 差 分 法
帧间差分法是利用相邻帧图像间的区别来获取运动目标。即对一段视频中连续的图像帧做差分运算,以此获取运动目标轮廓。在多目标检测和摄像机运动的情况下也具有很好的适用性。
1.4 运动目标跟踪方法概述
1.4.1基 于 轮 廓 的 跟 踪 方 法
其思想是将图像进行分割,得到一块连通的区域,进而判别该区域是背景还是前景。将得到的目标轮廓作为初始模板,对视频中的每一帧图像进行二值化处理,最后进行模板匹配,跟踪运动目标的轮廓,并自适应更新。
1.4.2基 于 特 征 跟 踪 法
该算法通过提取车辆某些特征来实现车辆跟踪。常见的目标特征有:点、线、区域、大小、边缘,有时候还有一些亮度特征。在视频图像序列中,一般情况下的帧频率为15-30帧/秒,可以假设这些特征在其运动轨迹上是平滑的。
1.4.3基于 3D模型的跟踪方法
该方法是根据摄像机的三维几何学知识,通过将一个三维模型投影到图像中,从而分析图像中运动目标的位置而进行跟踪[1]。运用三维模型来描述,特征较全面,但获取精确的运动目标几何模型非常困难,因此其应用也受限。
2 电动自行车检测跟踪
2.1 电动自行车识别
2.1.1降 噪 处 理
图像降噪的方法有均值滤波、中值滤波、形态学噪声滤除和小波去噪等。通过比较分析,我们最终采用的是中值滤波,这种降噪方法对消除椒盐噪声特别有效,既去除噪声又能保证图像的边缘锐度不改变。
2.1.2降 序 排 序
利用OpenCV中自带的寻找轮廓和绘制轮廓函数获取前景对象的最外轮廓,再将每一个轮廓的面积用其外接矩形的面积表示,并对面积进行降序排序,去除伪目标。
2.2 电动自行车跟踪及轨迹提取——卡尔曼滤波
卡尔曼滤波原理是:根据运动方程对该值进行预测,作为跟踪的一个依据。另一个依据是用测量手段得到变量的值。卡尔曼滤波通过对这两个依据进行一系列迭代实现运动车辆跟踪[2]。
卡尔曼滤波理论的两个核心公式为:
运动方程:Xk=AkXk-1+Wk(2-1)
预测方程:Yk=CkXkVk(2-2)
2.2.1跟 踪
1)跟踪车辆质心提取
在图像处理中用外接矩形框住电动自行车,矩形中心即车辆质心。由矩形可以获得对角点坐标:左下点 A(x0,y0),右上点 B(x1,y1)。通过对角点坐标可以求出中心坐标
2)质心匹配
假设我们要跟踪第k帧中的第i个目标,要计算在k+1帧中所有车辆目标和上一帧中第i个目标的距离,我们假设与k+1帧第j个目标进行计算:

2.2.2轨 迹 显 示
将监测的电动自行车质心标记为:

其中(xiyi)表示第i帧图像中被追踪目标的质心坐标,将这些坐标相连,即可绘制出电动自行车运动轨迹,再根据图线判断电动自行车行为。
3 逆行检测
以道路规定的正确行驶方向为y轴正方向,摄像机对着车流来向。用数组Centre[i]来存储质心坐标。在正确的行驶情况下,y轴的坐标只会逐步增大,一旦出现yi+1-yi<0,即可判定电动自行车逆行。但是这种判断方法易受干扰,检测的错误率较高,因此需添加一个约束条件:

其中Dm表示检测帧数的最少值。NUM表示在两帧间逆行的次数,N表示比较总次数,若其中逆行的比例较大,则认为车辆发生了违章逆行。

图3 电动自行车检测结果
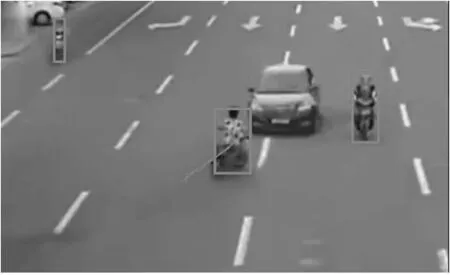
图4 质心跟踪轨迹
4 结论
本文运用Open CV3.0.0和Visual Studio2010搭建了交通视频监测平台,实现电动自行车逆行检测。道路现有的摄像头基本都是对机动车违章进行抓拍,缺少对电动自行车的监测。在对比传统的基于图像处理的车辆行为检测技术后,采取合适的方法对电动自行车逆行行为进行研究,仍存在以下待改进的地方:
(1)电动自行车逆行的交通视频难以采集,算法测试样本不足;
(2)本文所用视频发生时间均为白天,对于夜间的电动自行车检测准确度将会降低;
(3)交通监测系统应能自主检测并报警,本文所用算法无法做到实时传送;
(4)当交通场景中车辆运行混乱时,应结合更多的特征作为目标模板。当有遮挡发生时,算法应该能在线学习来保持目标跟踪的实时性。
【参考文献】
[1]高冬冬.基于车辆跟踪轨迹的停车和逆行检测研究[D].西安:长安大学,2015.
[2]王明.Kalman滤波实现目标跟踪[DB/OL].http://blog.csdn.net/wangluomin/article/details8807602,2013.4.16.