军车主动悬挂实用控制算法概述
2018-03-30张春生冯占宗
王 帅, 房 强, 张春生, 刘 捷, 冯占宗
(中国北方车辆研究所,北京 100072)
高机动性是军车的典型特征.悬挂系统性能是制约车辆机动性关键因素之一.传统上改善悬挂性能的主要措施是增加行程,使军车越野速度达到40 km/h.但是,该措施也相应地使车辆重心升高,恶化了车辆操纵稳定性,增大了被敌方火力命中概率[1].上世纪90年代起,西方国家开始尝试主动/半主动悬挂技术[2-4],开启了悬挂发展的新阶段.
主动/半主动悬挂可根据工况实时调节悬挂特性,从根本上解决了被动悬挂存在的阻尼不适应问题.其中控制算法用于确定控制力大小与输出的时机,是系统关键技术之一.随着现代控制理论发展,出现了各种控制算法[5-7].选择适当的控制算法不仅能获取较好的控制效果,还能弥补执行器响应特性的不足、避免获取不易测量的状态量以及降低系统能耗.
本研究主要综述20年来美、英等国在主动/半主动悬挂样车上尝试的控制算法及实现过程,提出了基于预瞄感知、防悬挂击穿的多算法综合控制是未来高机动军车的发展方向.
1 控制算法的分类
1.1 主动控制与半主动控制
习惯上,人们根据执行器(即作动器与减振器)输出的控制力特性将控制算法分为主动控制与半主动控制,但这两种模式在原理上无本质区别.在半主动悬挂中,变阻尼减振器仅能输出与运动速度方向相反的阻尼力,当按主动控制算法计算需输出与运动方向相同的控制力时,只好对算法加以限界:令减振器输出最小力,将负面影响最小化.限界后的算法一般称为半主动控制模式.显然,主动控制属全时控制,而半主动控制仅在部分时间内干预振动.假设一段时间内控制力所做的功相同,则需减振器输出力的范围比作动器要大.
近年来,机电式作动器的出现为主动、半主动交替控制提供了可能[8].电磁装置具有响应快、既具有发电机的制动特性也具有电动机的机械特性,因此可实现半主动控制模式(振动能量回收)与主动控制模式的交替控制方式.这种控制方式能有效降低主动悬挂的功耗.
1.2 主控制与辅助控制
某种控制算法往往只针对某一动力学指标而设计的.如,天棚控制算法只能抑制车辆在垂直方向上的振动,而不针对车辆的俯仰振动、车轮动载以及悬挂击穿.事实上,车辆在越野路面上高速行驶时,频繁出现“悬挂击穿”现象及剧烈的俯仰振动.为此,引入了辅助控制,控制信号表示为[9]
Uoverall=Uprimary+Uauxiliary.
(1)
式中:Uoverall为执行器接收到的控制信号;Uprimary为主控制算法(如天棚阻尼控制算法)控制信号,代表天棚阻尼控制算或恒力控制算法;Uauxiliary为辅助控制算法,如防悬挂击穿算法、姿态控制等.
1.3 即时感知与预瞄感知
越野路面上经常存在石头、土坎以及凹坑等路面障碍,车轮高速碾压时车体受到冲击加速度经常达到人体承受的上限.实测表明:当车辆以时速54 km/h驶过高度127 mm的路面障碍时,车轮与路面障碍的撞击时间仅为10~20 ms,强度高达60 g~100g.
目前在研控制算法中对路面激励感知主要是测量车轮垂向加速度间接获得,称为即时感知.显然,如果整个控制系统时滞较大,则在这种路面下即时传感系统难以改善平顺性.而如果能提前获取前方道路信息,通过收、放车轮实现“跨越”路障避免强烈撞击则可,因而预瞄感知是更为主动的控制方法.
预瞄感知可分为基于前视预瞄感知(preview control based on look-ahead)和基于前轴的预瞄感知(preview control based on front wheel)两类[10].前者利用超声波或激光传感器实时测量车辆前轮前方道路不平度的信息;后者将前轮振动状态量作为后轮悬挂输入.
2 实用控制算法及用例
目前,进行过样车试验的控制算法主要有:天棚控制、恒力控制、姿态控制,等等.其中天棚控制试验与应用最为普遍.
2.1 天棚控制(skyhook control)
1)基本原理.
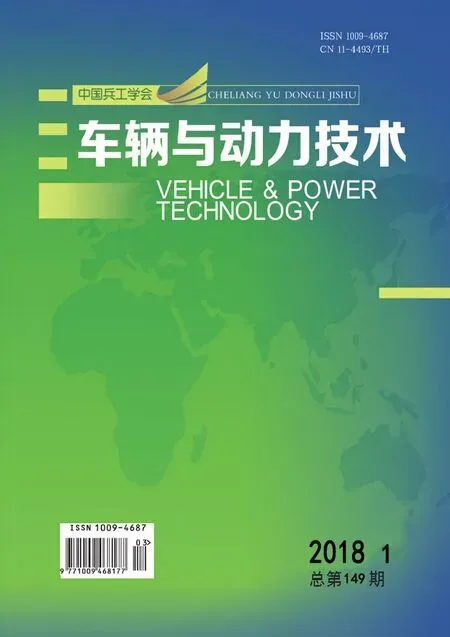
1974年,美国加州大学Karnopp根据 “天棚” 阻尼悬挂(图1)的概念提出了天棚控制算法[11],是车辆工程领域最常用的算法.
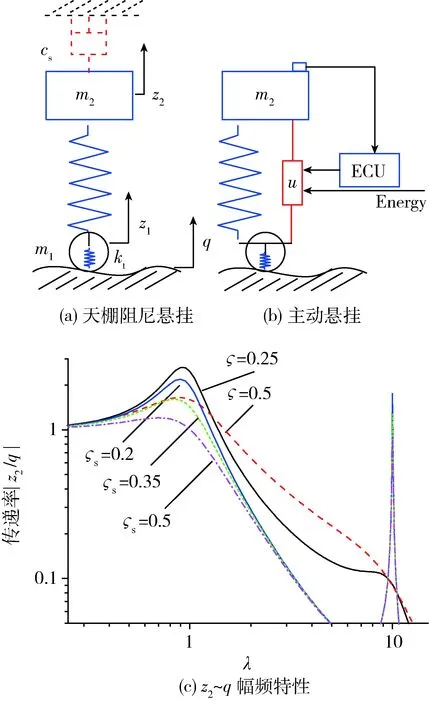
图1 天棚悬挂物理模型
在结构上,“天棚” 阻尼悬挂的减振器安装在车体与假想天棚之间,而实际悬挂的减振器则安装在车体与车轮之间.结构差异导致了明显的动力学区别.“天棚”悬挂动力学线性模型可表示为:
(2)
式中:m1为非簧载质量;m2为簧载质量;z2为簧载质量在垂直方向上位移(振动幅度);z1为非簧载质量在垂直方向上位移;k为悬架刚度,cs为天棚阻尼系数;kt为轮胎刚度;q为路面不平度.
图1(c)所示的是两种结构的z2~q的幅频特性(图中阻尼比ζs代表天棚悬挂,ζ代表被动悬挂,λ代表路面激励频率与悬挂系统固定频率之比).图中表明,天棚悬挂在全频域内都有理想的传递率,且随着天棚阻尼增加,传递率越低,这有利于车辆在各工况高速行驶;而被动悬挂系统则不同:大阻尼仅在低频时、小阻尼仅在高频时才能获得较小的传递率.
2)用例.
自2004年起,Millenworks特种车车辆厂研制了磁流变半主动悬挂(magneto-rheological optimised active damper suspension,MROADS).MROADS由8个磁流变减振器、8个控制器及传感系统组成.分别在HMMWV、 USMC LAV-25, M2/M3 Bradley,及装甲运兵车Stryker上进行了大量道路试验[12].目前Stryker MROADS已在美陆军尤马试验场完成4 000英里耐久性试验,技术成熟度达到7级.
由于磁流变减振器输出的控制力方向与速度方向相反,因此将天棚控制算法限界为:
(3)

3)试验结果.
图2为装配MROADS磁流变半主动悬挂的样车及试验结果.道路试验表明,采用磁流变半主动悬架后,车辆的操纵稳定性得到明显改善.主要结论包括:(1)响应时间仅为4 ms,可实现实时控制;(2)驾驶员座椅处的振动幅度显著降低,在平均吸收功率6W限制下的越野车速由36 km/h提高到61 km/h;(3)以同等速度通过半圆形障碍物路面(half round or curb hits)时,车辆加速度峰值降低50%~70%、车辆俯仰角振动速度可降低30%.
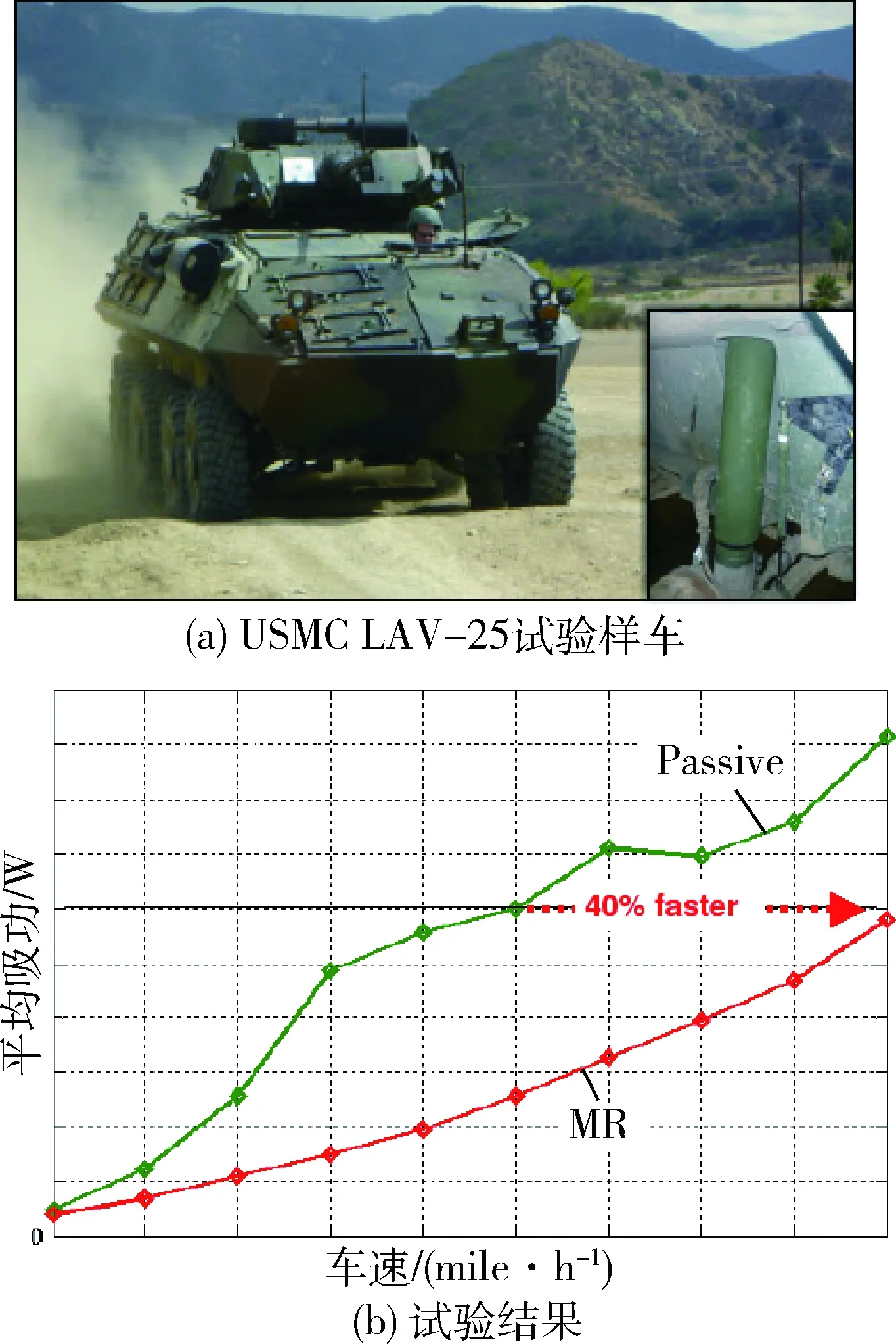
图2 MROADS样车及试验结果
2.2 近似恒力控制算法(Near Constant ForceControl Algorithm,NCF) [14-16]
1995年,得克萨斯大学机电中心的Beno等人在为M1主战坦克研制机电主动悬挂时提出了“恒力”控制算法.图3为单轮悬挂系统简图.
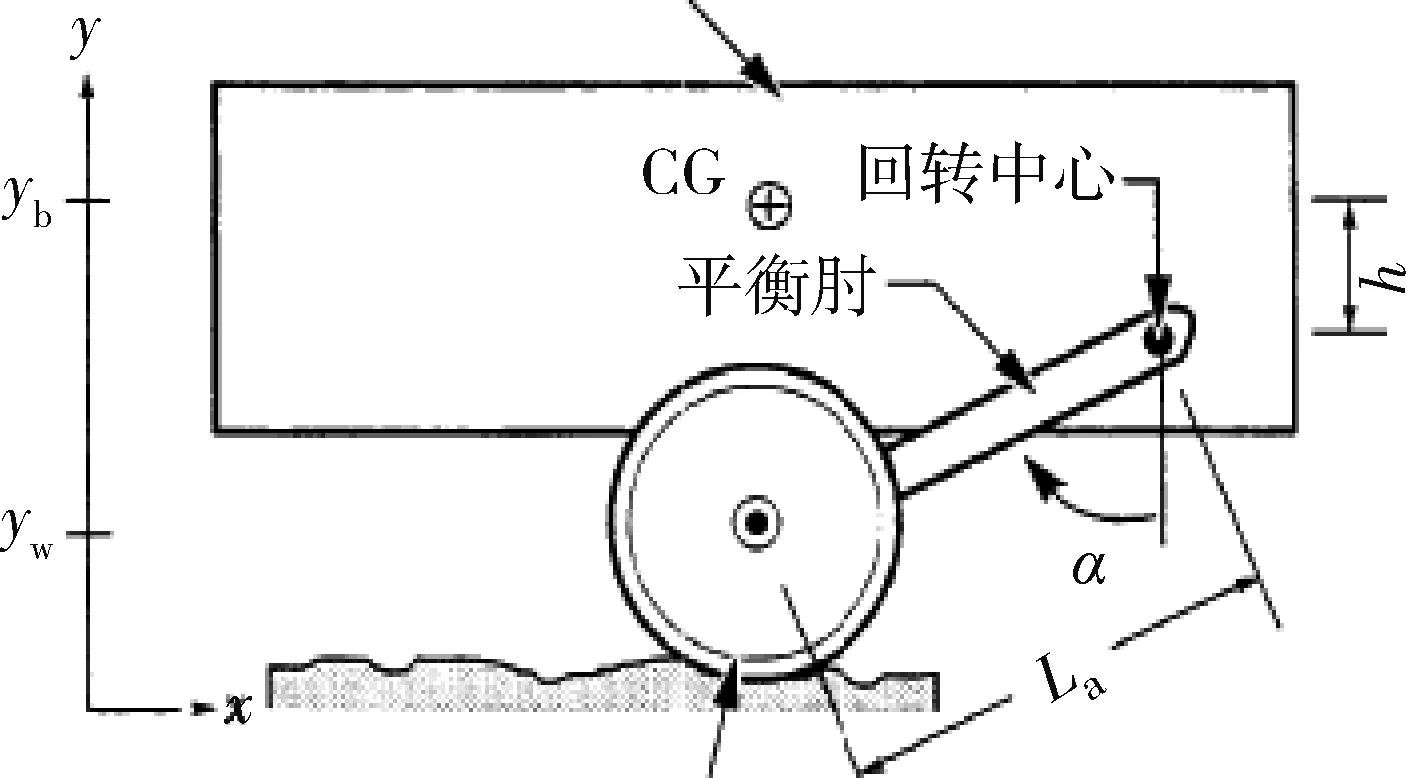
图3 M1单轮悬挂系统简图
1)基本原理.
研究表明,由于弹性元件可支撑车重,将显著减小主动悬挂中作动器输出的控制力或扭矩,从而降低作动器的体积及能耗,并提高了系统的可靠性.因此,Beno等人研制的电磁悬挂均保留弹性元件,并在此基础上提出近似恒力控制,其控制思想是:令作动器输出控制力抵消弹性元件的动态力,实现车体振动加速度最小化.
由图3所示的M1悬挂系统导向结构的几何关系可得:
yb=yw+h+L3cosα,
(4)
微分,可得
(5)
(6)
(7)


(8)
式中:Iwa为负重轮及平衡肘的转动惯量;mw为负重轮的质量;ma为平衡肘的质量;mb为车体的质量;τ为电磁作动器、系统摩擦力及扭杆作用在支座回转中心扭矩之和;Mtor=mw+ma+mb.上式可用Runge-Kutta算法求解.
τ=τA+τD.
(9)
作动器输出控制力矩可表示为
τcontrol=τ-τspring(α).
(10)
式中:τspring为弹性元件引起的扭矩,是角度的函数,可通过查表的方式确定数值.
弹性元件的刚度具有较强的非线性,为进一步提高计算精度,Beno等人尝试将模糊控制引入到近似恒力控制算法中[17].
2)算法用例.
近似恒力控制算法分别在M1单轮悬挂试验台及HMMWV电磁悬挂样车(1999年,2007年)、LMTV电磁悬挂样车(2003年,2007年)与Lancer电磁悬挂样车(2005年)进行道路试验验证.
3)试验结果.
试验表明,原车在越野路面行驶时,车体有较大俯仰,而采用恒力控制后,Lancer样车俯仰振动较小;图4为车速与平均吸收功率之间关系.图中表明,当车辆在4#路面(路面不平度均方根值为1.83 in)行驶时,在平均吸功6 W评价标准下,样车时速可达30 mile/h,是原车越野速度的2倍多.

图4 Lancer样车试验实况与数据处理结果
该算法具有以下优点:(1)控制所需状态量可直接量测;(2)控制算法包含姿态控制;(3)能耗低,单位能耗远低于0.82 kW/t.
2.3 预瞄控制(Preview control)
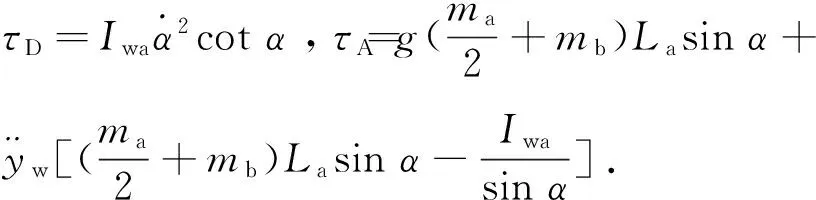
1992年,英国莲花工程公司(Lotus Engineering UK)及后来的加利福尼亚大学在为美军坦克车辆和装备司令部(TACOM)研制的电控液压主动悬架技术的HMMWV样车(图5)时采用了预瞄控制[18].其中传感系统先后采用了O.ConnerEngineering公司的调频连续波(FMCW)雷达测距仪和Sick Optic公司的WTA24-P5401型发光二极管红外线传感器作为路面预测传感器进行试验.
图5 预瞄控制系统及其简图
1)基本原理.
由图5中三角关系可得:
(11)
式中:θ为车辆俯仰角;φ为侧倾角;α为测距仪安装角;zroaol为路面高;zsens为测距仪高;Dmean为测距仪到路面突起的平均距离;CGlong为车辆质心至测距仪的水平距离;Xf为前轮至测距仪的水平距离.
因此只需测量Dmeas、θ即可求得路面高程差.
2)用例.
民用车辆Mercedes-Benz 2014 S-class采用的Magic body系统,是在原有主动车体控制系统(Active Body Control,ABC)的基础上增加路况扫描仪.该路况扫描仪采用立体相机(stereo camera),可提前获取前方道路不平度信息,经控制器识别、分析、评估后,指令执行器提前动作[19].
近年来,随着军车无人驾驶技术的飞速发展,有望在车身剧烈颠簸、全天候、全地形等条件下准确识别、预测车辆前方的复杂越野路况(如杂草或灌木遮盖的路面),从而为预瞄控制工程化应用提供可能.
3)试验结果.
加利福尼亚大学将计算所得的Zroad及其变化速率作为线性悬挂系统的激励,应用最优控制理论求得最优控制力.图6为HMMWV主动悬挂样车试验结果.试验表明,预测控制在预知的越野路上明显优于天棚阻尼控制,且能够降低能量消耗并使系统的控制性能大大改善.
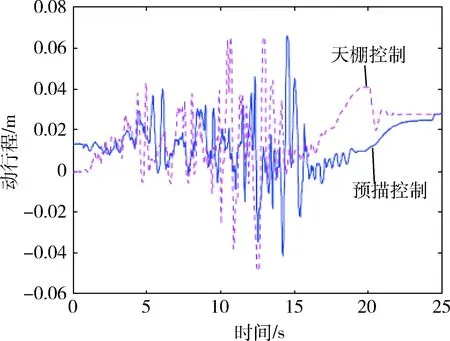
图6 预瞄控制与天棚控制对比
2.4 姿态控制(Attitude control)
履带车辆、工程车辆在反复碾压的起伏路面行驶时,车体振动以俯仰(pitch attitude)、侧倾振动(roll attitude)为主.姿态控制可减少乘员的“晕车”现象,也可给车载武器系统提供较为平衡的发射平台,提高首发命中率.
1)基本原理.
对于前后悬架而言,低通一阶滤波器可以改善控制环的稳定性.该滤波器的位移可表示为
(12)
式中:yf为滤波器的输出;τ为时间常数(4 s),xBW为前后悬挂的变形量,由安装在车体与车轮之间的位移传感器测量.滤波器的输出yf被用于PID控制器的输入,可描述为
(13)
式中:yL为PID指令信号,KLP、KLI、KLD分别为比例、积分、微分增益.
2)试验结果.
Leads大学的Crolla等人在为英军研制高机动运兵车液压式主动悬挂样车采用了姿态控制.该算法以LQR为主控制、PID控制作为辅助控制算法[20].控制的目标是消除因路面不平引起的车辆前后悬挂变形,使车体保持水平.
Crolla等人通过半车模型对控制算法进行了数值仿真验证.图7为车辆在紧急制动时车体状态变化情况.图中表明,PID控制器有效降低了车体俯仰振动.
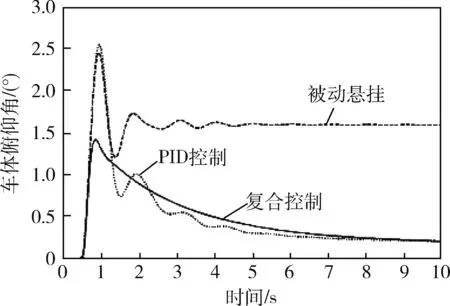
图7 紧急制动时状态控制对比图
2.5 开关(on-off)控制算法
执行器输出控制力大小往往受多因素影响,输出力随减振器温度、控制电流等外部条件变化而变化,较难得到准确的控制力.工程上往往采用两级阻尼[3]或多级阻尼减振,相应地,控制过程采用开关控制、bang-bang等算法.
1)基本原理.
1997年,美军坦克-机动车司令部根据两级阻尼减振器的阻尼力特点采用了开关控制算法.控制器根据车体状态量对各轮悬挂系统实施独立控制,逻辑判断及控制流程如图8所示[3].
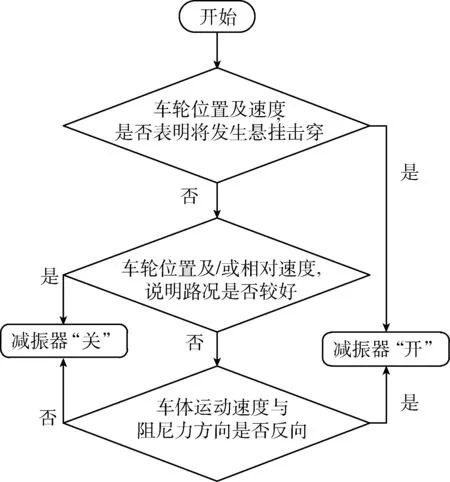
图8 Bradley半主动悬挂样车开关控制
控制思想:只要不发生悬挂击穿或减振器阻尼不利于抑制车体振动,就采用小阻尼,充分发挥弹性元件的缓冲能力,减少经减振器传递的车轮冲击.
2)试验结果.
该控制算法在Bradley油气半主动悬挂样车上进行了道路试验,结果如图9所示.图中表明,在同一越野路面及平均吸功6 W标准比较下,样车能有效抑制车体的俯仰与垂直振动,车辆越野速度能得到提高.
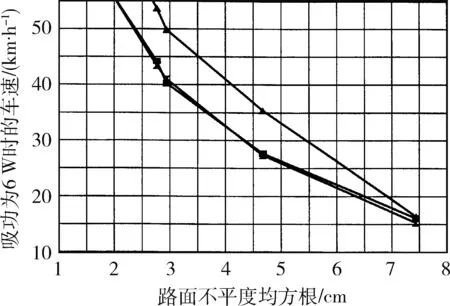
图9 路面不平度-车速关系
在半主动悬挂方面,近年来又出现了ADD 、PDD等控制算法[21-24],具有算法简便、所需测量状态量少、较贴近工程实践等优点,但尚未有道路试验的报道.
3 控制算法比较
本研究以一辆安装6对车轮(传统上安装6只减振器)的履带车辆为例对各算法进行比较.
表1中将传感器安装位置作为一项指标的原因主要是考虑到:军车使用工况主要为越野路面,车轮及悬挂系统所处自然环境恶劣,经常受到泥沙侵蚀、冲刷以及草木缠绕,因此应尽量避免在车轮及悬挂系统处安装传感器.而控制力精度反映的是对作动器的要求.在开关控制中,可将作动器输出力设计为大小两级,无需精确的控制阀,从而降低了对作动器控制精度要求.
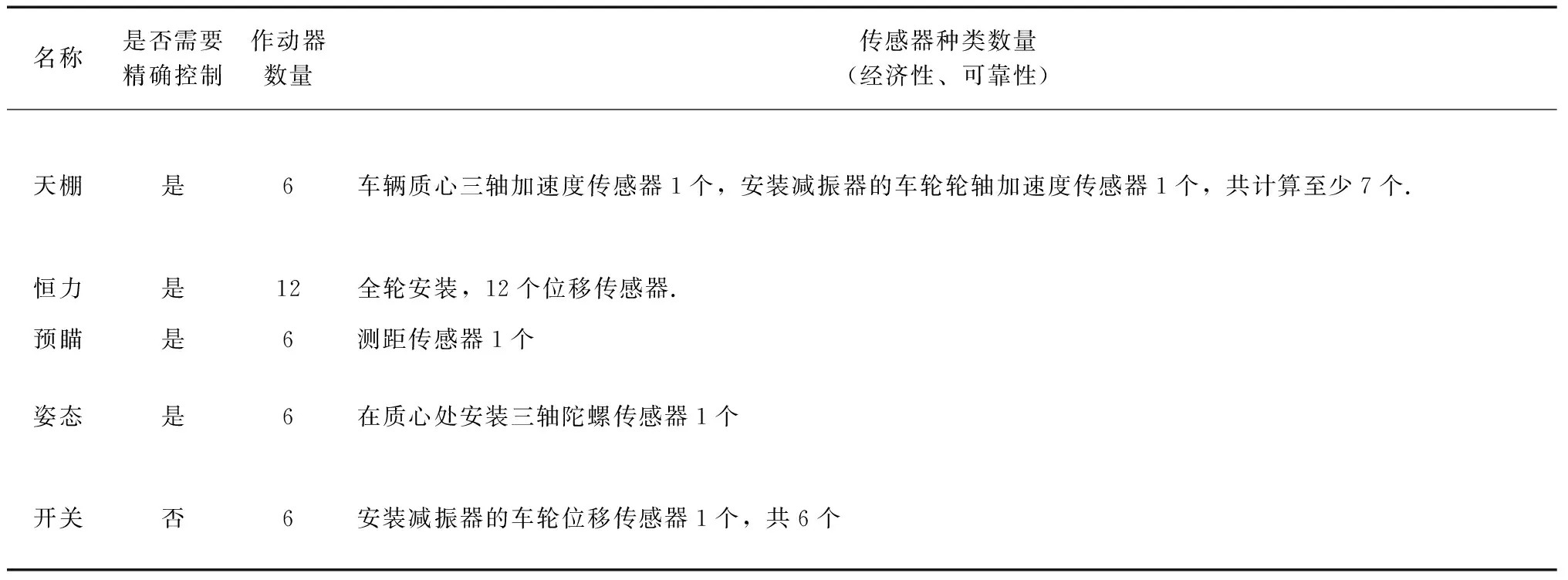
表1 各算法比较
表1仅定性列出了几项指标,更全面评价需根据车辆的结构、质量分配情况、主要用途、系统功耗、作动器的控制力调节范围等因素,在多次试验的基础上才能给出.
当然,由于各算法侧重点不同,单一算法可能无法满足减振要求.另外车辆结构不同,振动特性不同,选择的控制算法也不同.如履带车辆具有多轮、短轴距的结构特点,其振动以俯仰振动为主,采用姿态控制较为合适.
4 结束语
选择适当的控制算法可降低主动悬挂的成本、系统复杂程度、能耗以及对作动器的性能要求,有利于该技术的工程化、市场化.
在未来高机动要求下,车轮受到的冲击与悬挂击穿问题更为突出.引入防悬挂击穿、防车轮撞击与路面突起等辅助算法将成为一种趋势.因此,未来算法设计将是综合性的.而预瞄感知能弥补控制时滞的影响,将成为未来应用研究的热点.
[1] J.H.Beno,F.B.Hoogterp,D.A.Bresie,etc.Electr-omechanical Suspension for Combat Vehicles [J].SAE TECHNICAL PAPER SERIES No.950775,1995:1-8.
[2] N.L.Saxon, W.R.Meldrum,Jr..Semiactive Susp-ension: a Mobility Case study [J].SAE 970386,1997:1-5.
[3] N.L.Saxon, W.R.Meldrum,Jr.and T.K.Bonte.Semiactive Suspension: a Field Testing Case study [J].SAE 981119,1998:1-8.
[4] A.Deakin,D.Crolla,and A.Shovlin. Power Consu-mption in Ride of a Combat Support Vehicle Slow-Active Suspension [J].SAE TECHNICAL PAPER SERIES No.973205,1997:57-61.
[5] Okhyun Kang, Youngjin Park, Youn-sik Park, Moonsuk Suh.s.l.Look-ahead preview control application to the high-mobility tracked vehicle model with trailling arms[J]. KSME & Springer, Journal of Mechanical Science and Technology, 2009,23(6):914-917.
[6] R.S.Sharp, Huei Peng.Vehicle Dynamics Applica-tions of Optimal Control Theory[J] Taylor & Francis Group, Vehicle Systems Dynamics, 2011, 49(5):1073-1111.
[7] Muthuvel Murugan and Ross Brown. Advanced Suspension and Control Algorithm for U.S. Army Ground Vehicles[R] .The report of Army Research Laboratory, No.ARL-TR-6415,2013.
[8] Markus Baeuml,Florin Dobre,Harald Hochmuth. The Chassis of the Future[C]//Schaeffler lightweight differentials,10th Schaeffler Symposium, 2014:393-410.
[9] LORD CORPORATION. End stop control:EP 10661 66B 1[P].2006.
[10] 陈 兵,尹忠俊,顾 亮. 军用车辆悬架系统预瞄控制现状与发展趋势研究[J]. 自动测量与控制, 2008, 2(27):87-92.
[11] Karnopp D.,Crosby,M.J.and HARWOOD R.A.. Vibration control using semi- active force generator [J]. Journal of Engineering for Industry,1974,96(15):619-626.
[12] Andrea C.Wray,Eric Anderfaas.Magneto-rheological fluid semiactive suspension performance testing on a Stryker vehicle[R].Army Research Office,2005
[13] Eric N.Anderfaas,Dean Banks.Magnetorheological damper system:U.S.,6953108B2[P].2005-11.
[14] J.H.Beno,D.A.Weeks.Near Constant Force Suspension Control Algorithms:U.S.,5999868[P].1999-07.
[15] J.H.Beno.Electronically Controlled Suspension Syste-ms[EB/OL].http://www.utexas.edu/research/cem/ACTIVEPASSIVE/AS01.htm,2005.
[16] J.H.Beno.Electromechanical Active Suspension Dem-onstration for Off-Road Vehicles [J].SAE, 2000- 01- 0102:1-10.
[17] J.R.Mock, D.A.Weeks, J.H.Beno. Dual Purpose Fuzzy Logic Controller for an Active Suspension System [J]. SAE TECHNICAL PAPER SERIES, 2002-01-0986:1-14.
[18] M.D.Donahue and J.K.Hedrick. Implementation of an active suspension, preview controller for improved ride comfort [D]. US: The University of California at Berkeley, 2001: 49-55.
[19] C. Pawsey.The Development of Active Suspension Systems [EB/OL]. http:// www. IQPC.de,2014.
[20] S.M.EI-Demerdash,A.M.Selim,D.A.Crolla. vehicle body attitude control using an electronically controlled active suspension [J].SAE1999-01-0724,1999:1-9.
[21] S.Savaresi, S.Bittanti and M.Montiglio. Identific-ation of semi-physical and black-box non-linear models: the case of MR-dampers for vehicles control [J]. Automatica, 2005,41(10):113-117.
[22] S.Savaresi and C.Spelta. A single sensor control strategy for semi-active suspension [J]. IEEE Transaction on Control System Technology, 2009, 17(1): 143-152.
[23] R.Morselli and R.Zanasi. Control of a port hamiltonian systems by dissipative devices and its application to improve the semi-active suspension behavior[J]. Mechatronics,2008,18(7):364-369.
[24] S.M.Savaresi,C.oussot-Vassal,C.Spelta,O.Sena-me. Semi-Active Suspension Control Design for Vehicles [M]. Elsevier, 30 Corporate Drive, Suite 400, Burlington,MA 01803, USA,2010.