手机打车软件操作驾驶分心检测模型研究
2018-03-30唐智慧王志鹏党珊朱翠翠
唐智慧,王志鹏,党珊,朱翠翠
(1. 西南交通大学,交通运输与物流学院,成都 610031 2. 济南市技师学院,济南250000)
0 引 言
在我国随着智能手机的普及,越来越多的人开始注册并使用手机打车软件,致使驾驶中使用打车软件的分心现象也越来越常见。分心驾驶是引发道路交通事故的重要原因之一,美国国家安全委员会2009年的最新研究报告指出:美国每年由于驾驶中使用手机通话导致的交通事故占到了所有事故的6%。同时,研究结果还指出:驾驶中使用手机发生交通事故的概率是不使用手机的4倍[1]。
国外学者早在20世纪90年代中期就开始了手机使用对驾驶影响的研究。Liu和Lee[2]通过实验发现驾驶经过信号交叉口时使用手机通话,驾驶人对信号灯的反应时间增加,且反应正确率下降。Collet等[3]发现驾驶中使用手机会造成驾驶员认知负荷增加,其行驶速度会降低。李胜江、wollmen等[4,5]基于驾驶绩效指标,开展了驾驶分心检测模型的研究。国内对驾驶分心行为的研究起步较晚,现目前主要集中在驾驶分心对行为绩效的影响上。顾高峰[6]通过自然驾驶实验与实车实验的方式,证明了车载信息系统的使用会对驾车速度、加速度、方向盘转角大小等绩效指标产生影响。马勇等[7]通过试验探究出驾驶分心过程中,车道偏离量会高于正常驾驶。李宏汀等人[8]发现驾驶中使用手机会使RT显著增长,行驶路线发生明显偏移。同济大学吴佳华、刘畅等人[9]发现分心操作对驾驶行为有极大的负面影响,同时频繁通话情况最为危险,唐智慧等人[10]通过模拟实验研究了打车软件的具体操作使用对驾驶绩效指标的影响。
国内外研究充分证明驾驶分心行为会对驾驶绩效产生不良影响,而我国对于驾驶分心检测模型的研究还处于起步阶段。故本文以实验室驾驶模拟器为研究平台,采集驾驶分心行为数据,基于数据差异性分析结果,构建驾驶分心检测模型,具有十分重要的意义。
1 驾驶分心实验
1.1 实验条件
1.1.1 实验设备
实验选用的设备有汽车模拟驾驶器、iphone6splus手机、手机支架及蓝牙耳机。
驾驶模拟器硬件部分主要由视镜系统、仿真车辆、控制台区组成,如图1所示。视镜系统是由一个柱面投影屏幕、三台投影仪以及前向视景生成计算机和观后镜视景机构成的,可实现场景仿真结果的显示。仿真车辆是驾驶模拟器的主体部分,驾驶员可以在其内部完成各种模拟驾驶操作。控制台区即整个系统的控制区域,主要对驾驶模拟器系统实现全面控制[11]。

图1 驾驶模拟器硬件组成Fig.1 Hardware system of driving simulation
实验中所用到的手机是iphone6splus,手机内部配置有滴滴打车软件App,将该App及驾驶员拨号键都置于驾驶员常用的主界面,方便驾驶员使用。手机支架为真空吸盘式,在此实验中将其吸附在驾驶车辆方向盘右侧仪表台处。采用的蓝牙耳机是捷波朗商务通话蓝牙耳机,驾驶员驾驶中需佩戴其进行通话任务。
1.1.2 实验人员
参与实验的人员为40名(36男4女),年龄分布为23~28岁(均值mean=25.13,标准差std=1.56),驾龄分布为3~6年(均值mean=4.33,标准差std=0.97)。为了尽最大可能减少驾驶员个体差异与其他不相关因素对实验的干扰,实验人员需达到以下四个要求:
(1)均持有机动车驾驶证C1或以上的驾驶执照;
(2)裸眼或矫正视力在1.0及以上,色觉正常,无眼部疾病;
(3)身体健康状况良好,无重大精神系统疾病;
(4)试验前24 h睡眠充足,未饮酒且未服用任何可能导致疲劳困倦的药物。
1.1.3 试验场景
本文根据相关规范设计了一条城市道路,包括主干道、次干路。实验天气设置为良好,为了使模拟驾驶场景更为接近真实情况,道路特性和交通流特性设计较为复杂,具体路网结构如图2所示。
1.2 实验步骤
驾驶员使用打车软件引发的分心行为主要为蓝牙通话、与乘客交谈、查看信息与信息输入几类。实验需釆集驾驶人不同驾驶状态下的驾驶行为数据、驾驶员在驾驶过程中多次进行基于手机打车软件使用的分心操作,具体操作步骤如下。
(1)实验准备:调试好相关仪器;导入模拟驾驶场景;实验员向被试讲解实验流程;被试填写相关的表格。
(2)预备实验:让驾驶员进行5 min的预驾驶,以熟悉驾驶操作环境,能顺利完成车辆的启动、减速、加速等基本驾驶操作。
(3)正式实验:调出本文设计的驾驶场景,先让驾驶员在无分心操作状态下完成全路段驾驶,驾驶完毕后,休息两分钟;再调出驾驶场景,稍微变换一下周围建筑类型,让驾驶员认真执行主驾驶任务的同时,根据提示完成多次蓝牙通话分心次任务操作,驾驶到终点算完成该类分心驾驶实验,并休息两分钟;随后按照上述步骤,依次完成谈话、查看信息、信息输入三类分心驾驶实验。
(4)整理数据:将模拟器采集到的正常驾驶行为数据、蓝牙通话与乘客交谈两类视觉分心行为下的驾驶行为数据、查看信息与信息输入两类认知分心行为下的驾驶行为数据进行记录处理,并据此构建各类驾驶状态下的行为数据库。
2 分心检测指标确定
对驾驶绩效指标进行显著差异性检验,判断驾驶绩效指标检测驾驶分心行为的有效性,可筛选出建模需要的指标。
2.1 分心检测指标选取
车辆控制指标用于描述驾驶员的驾驶操作和车辆的运行状态。驾驶员进行驾驶分心操作时,相应车辆控制指标参数必然会产生波动。结合本校模拟器的实际情况,本文采集的绩效参数有:油门踏板开度、刹车踏板开度、纵向速度、纵向加速度、横向速度、横向加速度、方向盘转角、方向盘转角角速度。为了体现波动情况,并避免参数正负数值对结果的干扰,研究均使用采集参数的标准差值。
2.2 分心检测指标有效性分析
将每种分心行为下的数据看作一个总体,μ1,μ2,μ3,μ4,μ5看作为正常驾驶、蓝牙通话、与乘客交谈、查看信息、信息输入水平下驾驶绩效指标总体期望。假设H0:μ1=μ2=μ3=μ4=μ5,对各组样本进行检验。
假定各组样本均满足正态性、方差齐性、样本独立性的要求,可得出与分别为与u的最大似然估计。不同驾驶状态对驾驶绩效指标所造成的影响可用组间离差平方和SSSA表示,如式所示(其自由度为4):

式中:ni为i类驾驶状态下的样本数。
组间离差平方和SSSE的自由度为n-3,用于表示随机误差对指标的总体影响:
式中:xij为i类驾驶状态下的第j个样本。
总体离差平方和SSSE的自由度为n-1,用于反应所有驾驶驾校样本值的离散情况,如下所示:
SSSA与SSSE的均方为MMSA与MMSE,比较MMSA与MMSE的值,则可计算统计量F,确定P。检验水平设置为α=0.05,即P<0.05时有显著影响。以每种任务主要资源需求特点为分类标准,将蓝牙通话、与乘客交谈两类归为视觉分心行为,查看信息与信息输入两类归为认知分心行为。通过对不同驾驶行为参数显著差异性分析,得表1。
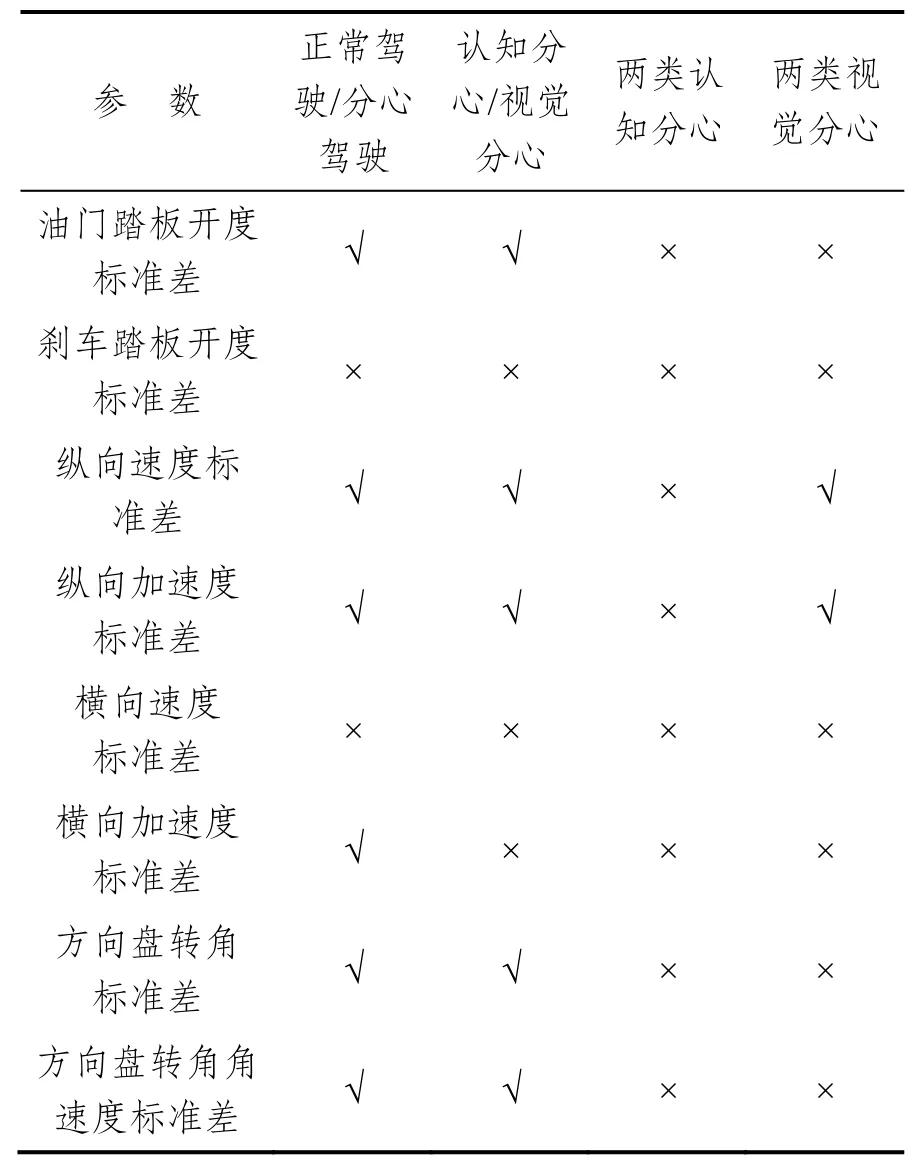
表1 驾驶行为参数差异性检验结果Tab.1 Difference tests of the driving behavior parameters
由表1可知,两类认知分心行为及两类视觉分心行为对驾驶员车辆控制能力影响差异不显著,故可分别将两类认知分心行为归为一组、两类视觉分心行为归为一组进行检测,将检测识别状态分为三类:正常驾驶、认知分心驾驶、视觉分心驾驶。能将这三类状态识别的参数需满足两个条件:正常驾驶与分心驾驶两种状态下的值有显著差异;认知分心与视觉分心两种状态下的值有显著差异。分析驾驶行为参数差异性检验结果可知,油门踏板开度标准差、纵向速度标准差、纵向加速度标准差、方向盘转角标准差、方向盘转角角速度标准差为有效检测指标。据此结论,可以从原数据剔除无效检测指标,优化重组出基于三类驾驶状态的分心检测数据库。
3 分心检测SVM模型构建
3.1 SVM模型原理
支持向量机(SVM)是由Vapnik提出的统计学习方法[12]。它遵循结构风险最小化原则,是一种较为新型的基于核函数的机器学习算法,目前已被广泛应用于模式识别等领域。支持向量机算法的目标是为了找到最优超平面,二维下的超平面如图3所示。

图3 最优分类超平面示意图Fig.3 Illustrative diagram of the separating hyperplane
当训练集是高维样本集时,常为线性不可分问题。可通过引入离群点惩罚函数iξ与惩罚系数C将样本映射到高维空间中,以达到线性可分或近似线性可分的目的。
3.2 SVM模型构建
本文将驾驶状态分成了三类,即正常驾驶状态为1类、认知分心驾驶状态为2类、视觉分心驾驶状态为3类,驾驶状态特征分类则可看作是分类数k=3 的多分类问题。具体模型构建过程如下:
(1)构造训练样本集和测试样本集
从正常驾驶行为数据库、视觉分心行为数据库、认知分心行为数据库中各随机选取200组数据。每组驾驶状态中随机选出的160组作为训练样本,另外40组作为测试样本,根据数据库来源标定好训练标签。
(2)选择核函数
多种实验已经证实采用径向基核函数进行分类效果最佳[13],故本文选用此方法,对驾驶分心行为检测模型进行搭建。
(3)惩罚因子c和核参数g寻优
相关文献已经证明交叉验证算法能优化出支持向量机的最佳参数,确保SVM的泛化能力[14]。本文采用K-CV(K-fold Cross Validation)方法作为交叉验证的方法,具体的方式为充分混合均匀样本集,将随机选出的160组训练样本集随机划分成预训练集和预测试集,使用迭代范围内的c与g值组合及预训练集训练SVM,同时使用预测试集测试SVM识别正确率,对c与g值组合进行迭代,选择出分心检测模型的最优参数c与g作为正式训练的模型参数。本文中当c值为256,g为0.18946时,训练的模型验证准确率达到最优。
(4)对测试样本集进行分类识别
使用基于最优参数的驾驶分心行为检测模型对每类驾驶状态下抽取的测试样本进行分类识别。
(5)对得到的识别结果进行分析和评价。
3.3 SVM模型评价结果
从三个数据库中各随机选择数据段40组作为测试样本,对搭建的各个SVM 检测模型进行测试。本文选用的评价指标有正确率与误判率,正确率的计算公式如下:
式中,n表示驾驶状态:1 表示正常驾驶,2 表示认知分心驾驶,3 表示视觉分心驾驶。
Pn表示模型对第n类驾驶状态的正确检测率。
qn表示第n类驾驶状态测试样本中被正确识别的样本数。
Qn表示第n类驾驶状态中的总样本数。
误判率作为模型效度的另一个评判指标,其计算公式如下:

式中,n,k表示驾驶状态,1 表示正常驾驶,2 表示认知分心驾驶,3 表示视觉分心驾驶。
pnk表示模型将第n类驾驶状态识别为k类驾驶状态的误判率。
rnk表示第n类驾驶状态测试样本中,被误判为k类驾驶状态的样本个数。
Qn表示第n类驾驶状态中的总样本数。
该模型对驾驶员正常驾驶行为、认知分心驾驶行为、视觉分心驾驶行为的正确检测率P1、P2、P3分别为85%、82.5%、92.5%,模型的平均检测正确率为86.67%。从正确率检测统计结果,该模型对驾驶员视觉分心驾驶行为的检测率最高,正常驾驶行为次之,对认知分心驾驶行为的检测能力最弱,但模型的总体检测效果较好。具体检测结果如图4所示。
为进一步检测模型对各种分心驾驶的分类准确性,招募10名驾驶员重复进行大量实验。每人提取正常驾驶、认知分心驾驶、视觉分心驾驶状态下40组驾驶分心行为数据,用以测试辨识模型性能,测试结果的准确率和误判率如表2所示。
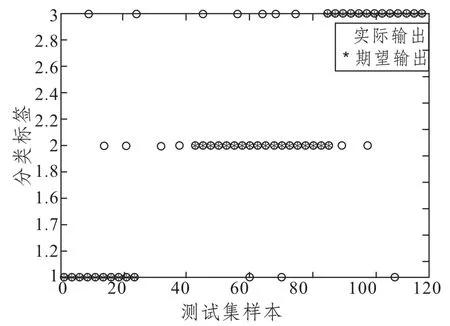
图4 驾驶分心检测模型验证结果Fig.4 Validation results of the distracted-drivirg detection model
从表2可知,本文所建驾驶分心检测模型在实际运用过程中,对不同的人员行为检测效果不同。平均正确率的变化范围为80%~92%,总体平均识别率为84.92%。对正常驾驶状态的正确识别率介于80%~90%,均值为84.75%,对于认知分心行为状态的正确识别率介于75%~90%,均值为81.75%;对视觉分心行为状态的正确识别率介于85%~95%,均值为88.25%。由此可知,该模型实测结论与测试结论相差不大,对三类驾驶状态的识别率都较好,虽然驾驶员个体存在一定的差异性,但是模型总体识别率较高。
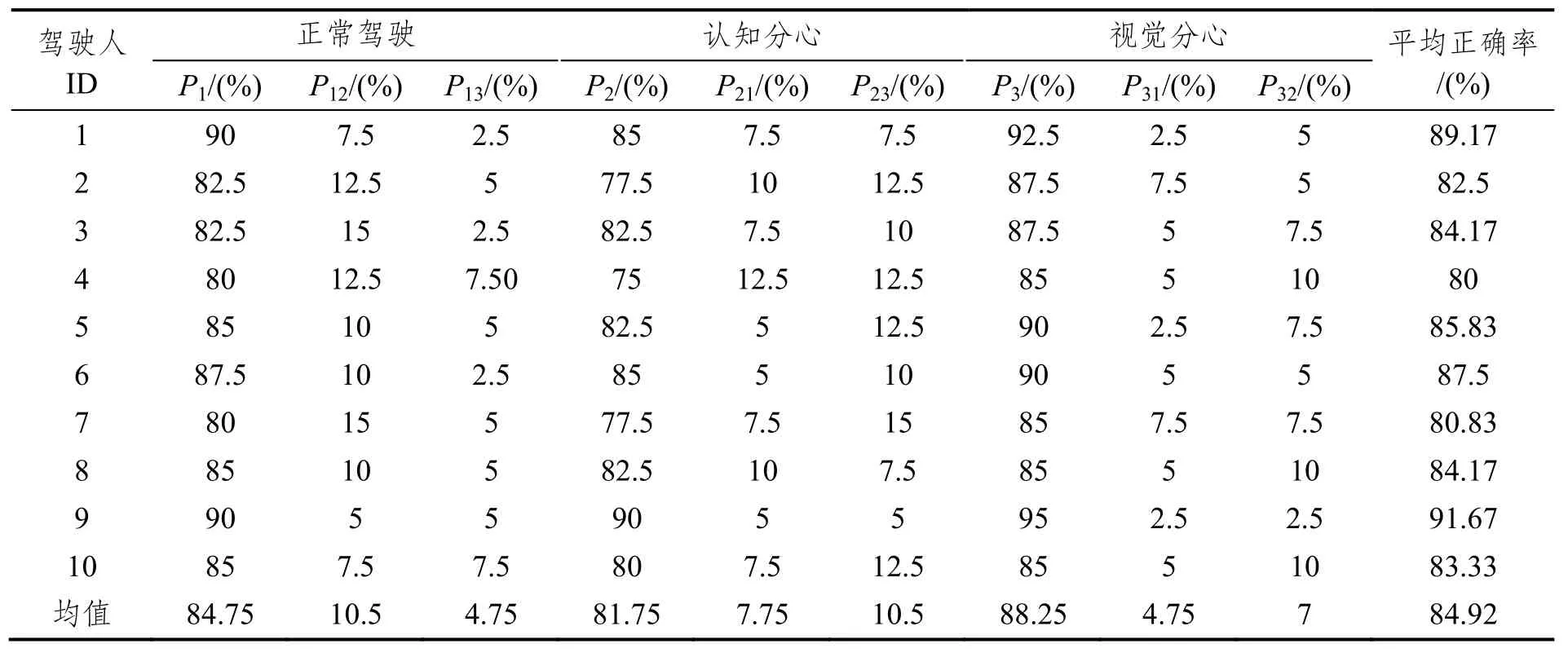
表2 驾驶分心检测模型对不同驾驶员的检测结果Tab.2 Testing results of different types of distracted driving
4 结束语
(1)驾驶中操作手机打车软件会对驾驶员车辆控制行为的产生影响,采用方差分析法对不同驾驶状态下的车辆控制指标进行差异显著性分析,可知:油门开度标准差、方向盘转角标准差、方向盘转角角速度标准差、纵向速度标准差和纵向加速度标准差五项指标能有效作为驾驶分心检测参数。
(2)基于支持向量机理论,建立驾驶分心SVM检测模型。从驾驶分心数据库中随机抽取训练样本集和测试样本集,训练分心检测模型,选取正确率、误判率为指标,验证模型效度。结果表明该模型在实际运用过程中,检测正确率较高,误判率低,可用驾驶分心状态检测。
(3)本研究采用驾驶模拟器进行试验,采集的数据与实车实验条件下的数据具会存在一定误差,后续应开展实车实验下的分心检测模型研究。
[1] National Safety Council. Death by Cell Phone- watch their stories[EB/OL](2009-07-10)[2010-08-26] http:www. nse. org/ page/ Death by cellphone. aspx .
[2] LIU B S, LEE Y H. Effects of car-phone use and aggressive disposition during critical driving maneuvers[J] Transportation Research Part F: Traffic Psychology and Behaviour, 2005, 8(4): 369-382.
[3] COLLET C, GUILLOT A, PETIT C. Phoning while driving I: a review of epidemiological, psychological,behavioural and physio-logical studies [J]. Ergonomics,2010,53(5):589-601.
[4] 李胜江. 驾驶人视觉注意力分散检测方法研究[D]. 长春:吉林大学,2015.
[5] WOLLMER M, BLASCHKE C, SCHINDL T, et al.Online driver distraction detection using long short-term memory[J]. Intelligent Transportation Systems, IEEE Transa-ctions on, 2011, 12(2): 574-582.
[6] 马艳丽,顾高峰,高月娥,等. 基于驾驶绩效的车载信息系统操作分心判定模型[J]. 中国公路学报, 2016,29(4):123-129.
[7] 马勇,石涌泉,付锐,等. 驾驶人分心时长对车道偏离影响的实车试验[J]. 吉林大学学报,2015,45(4):1095-1101.
[8] 李宏汀,刘彦宇,李文书. 驾驶中使用手机对驾驶员行为安全绩效影响综述[J]. 中国安全科学学报, 2013,23(1):16-21.
[9] 吴佳华,桂玉峰,刘畅,等. 基于驾驶模拟器的不同驾驶条件下手机使用的可靠度分析[J]. 交通与运输,2011,(12):176-180.
[10] 唐智慧,党姗,郑伟皓. 打车软件的使用对驾驶安全的影响[J]. 交通运输工程与信息学报, 2017,(1): 22-27.
[11] 黄成龙. 成都市三环路交通指路标志设置合理性研究[D]. 成都:西南交通大学,2015.
[12] 彭璐,支持向量机分类算法研究与应用[D]. 长沙:湖南大学,2007.
[13] LIANG Y L, REYES M L, LEE J D. Real-time detection of driver cognitive distraction using support vector machines [J], IEEE Transactions on Intelligent Transportation Systems, 2007, 8(2): 340-350.
[14] 张艳,吴玲. 基于支持向量机和交叉验证的变压器故障诊断[J]. 中国电力, 2012, 45(11): 52-55.
