履带式近海快艇运移平台的创新设计
2018-03-29,,2,,,
,,2,,,
(1.中国石油大学(华东) 机电工程学院,山东 青岛 266580;2.海洋物探及勘探设备国家工程实验室,山东 青岛 266580;3.渤海装备辽河重工有限公司,辽宁 盘锦 124010)①
随着近岸海域作业规模的不断扩大,安全高效地转移水陆人员及物资问题在近海工程领域显得尤为重要。近海快艇作为海洋石油装备的配套设备是进行人员及物资输送的有力保障[1-2]。
目前,国内外用于快艇系泊的主要设备是近海码头或钢制小平台,机动灵活性差,作业效率低。且在面对沿海地区周期性灾害(如浒苔)时无法实现转移作业,安全保障性差。因此,设计安全可靠、机械化程度高的履带式近海快艇运移平台具有非常重要的意义。
1 基于TRIZ理论的运移平台设计
1.1 问题分析与创新方案
传统的快艇系泊主要通过岸滩系泊或钢制小平台(如图1)实现的。该运输方式存在以下问题:①安全稳定系数低,抗海浪能力差;②物体长度体积庞大,不具备机动性能;③环境适应性能力差。

图1 传统钢制快艇系泊平台
TRIZ理论是基于知识的、面向人的发明问题,解决理论和系统化的方法学。其思路是将具体问题转换为TRIZ问题,通过TRIZ体系中理论和工具方法获得通用解。然后将TRIZ通用解转化为具体问题的解,并在实际问题中加以实现,从而获得问题的解决[3-6]。
针对实际问题,提出一种机械运移平台创新设计理念,即履带式运移平台。基于TRIZ理论,首先确定该设计理念在设计过程中的技术冲突:
1) 应改善的工程参数——运动物体的长度(No.4),运动物体的体积(No.7),可靠性(No.27),自动化程度(No.35)。
2) 恶化的工程参数——可制造性(No.32),系统的复杂性(No.36),控制和测量的复杂性(No.37)。
查阅阿奇舒勒矛盾矩阵[7],得到相应发明创新原理,综合分析实际工况及系统效率,选取1、13、17、29等4条原理解决上述问题,并提出相应的创新设计方案,如表1所示。

表1 选用的发明原理
基于上述选取的发明原理,对传统普通钢制平台提出创新方案设计。①空间维数变化原理:用以解决传统平台长度过长问题。根据该原理将二维平台变为三维钢制结构,实现快艇与平台升降衔接;②反向作用原理:用以保证设备发生故障时的应急处置措施。根据该原理采用应急轮升降方式以实现设备整体举升,克服履带驱动失效下陷停车情况;③气压和液压结构原理:用以解决机械设备体积庞大,传动机构空间占用比高等问题。根据该原理采用液压传动,操纵简单,便于实现传动机构紧密布置;④模块化:用以提高设备的自动化程度。根据该原理在设计过程中采用模块化设计以满足系统不同需求。
1.2 整机结构
综合考虑上述创新方案,设计了履带式近海快艇运移平台,主要由履带驱动总成、应急升降轮、起升系统总成、主支承框架、动力操作系统等模块组成。通过整体模块化设计,实现整机前进、转向以及爬坡。如图2所示。

1—动力操作系统;2—履带驱动总成;3—应急升降轮;4—钢丝绳;5—主支承框架;6—起升框架。
图2 履带式近海快艇运移平台结构示意
1.3 运移平台基本参数
行走方式 履带式
外形尺寸 10 380 mm×5 300 mm×5 800 mm
行走速度 3.2~6 km/h
最大离岸距离 100 m
最大吃水深度 3 m
最大载质量 7 110 kg
最大牵引力 229 kN
爬坡角度 ≤22°
起升速度 10 m/min
2 工作原理与计算分析
2.1 工作原理
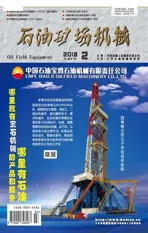
履带式近海快艇运移平台作为一种特殊工程车辆,其行走过程基本与履带挖掘机相仿,都是采用液压马达驱动履带实现沙滩浅海行走。运移平台主机机架上安装有R6105IZLD型柴油机、用于整机行走的液压系统、用于应急轮升降的液压系统、用于起升框架升降的液压系统、操纵座椅等。主支承框架与起升框架为钢制焊接结构(如图3)。起升框架嵌于主支承框架内,通过4个滑动导槽约束自由度,保证只能进行上下方向相对滑动;起升框架由左右各2根对称钢丝绳拴结,钢丝绳通过滑轮组变向固定到一侧液压缸活塞杆上,如图4所示。应急轮安装于主支承框架矩形钢立柱内部的活动柱塞上,柱塞与应急液压系统液压缸活塞连接。考虑海上工程结构物腐蚀问题,在底盘部分位置装有防护锌块。
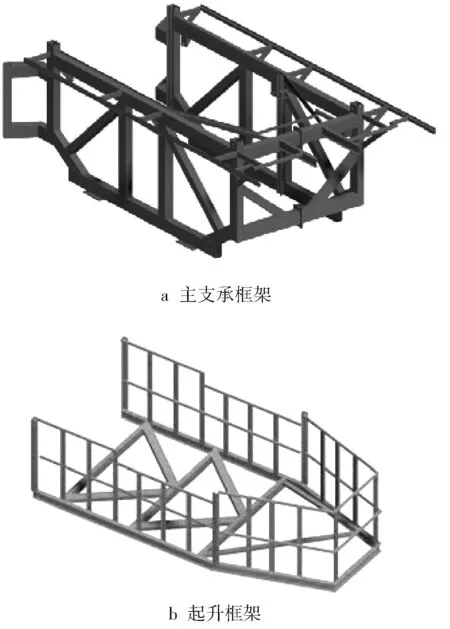
图3 主支承框架和起升框架
图4 钢丝绳起升机构
当整机行驶到海中时,首先确保整机入水中深度大于快艇吃水深度。快艇驶入起升框架,然后用于起升框架升降的液压系统工作,活塞杆带动4根钢丝绳运动,起升框架装载快艇起升,直至快艇与平台对接,进行人员物资交替转移;下放起升框架,使快艇浮于水面,倒车驶出平台。运移平台驶回陆地,进行人员物资转接工作。当运移平台处于浅海故障停车时,应急轮升降机构工作,支撑整个运移平台使履带离开海底地面,可通过外加力作用使平台拖回陆地返修。
2.2 计算分析
2.2.1整机质量质心
通过整机建模分析,履带式近海快艇运移平台满载整机质量为
m=m0+m1+m2=32 000
(1)
式中:m0为设备质量,取26 000 kg;m1为满载时人员物资质量,取2 500 kg;m2为快艇质量,取3 500 kg。
履带式近海快艇运移平台在空载与满载时质心位置改变较大,参考GB/T 3871.15―2006,要求对运移平台质心位置进行计算。空载时,质心至后支承点的距离A0=1 700 mm,质心至前支承点的距离B=1 050 mm,质心至地面的距离h0=950 mm;满载时,质心至后支承点的距离A0=950 mm,质心至前支承点的距离B=1 800 mm,质心至地面的距离h0=640 mm。
2.2.2稳定性计算
为保证运移平台在水陆地表行驶时具有良好的稳定性能,需要对不同作业工况下的整机稳定性进行计算。保证运移平台爬坡时不纵向翻倾的条件为
A0/h0>δ=0.7
(2)
式中:δ为滑转率。
空载时,A0/h0=1.79>0.7;满载时,A0/h0=1.48>0.7。因此,整机满足爬坡时不纵向翻倾条件。
保证运移平台在无横向坡度转弯时,不横向翻倾的条件为
a/2h>δ=0.7
(3)
式中:a为轨距,取4 000 mm。
空载时,h0=950 mm,a/2h0=2.10>0.7;满载时,h0=640mm,a/2h0=3.125>0.7。因此,运移平台在空、满载运行中均能满足无横向坡度转弯时不横向翻倾的条件,整机稳定性良好。
2.2.3接地比压
参照GB/T 7586―2008,运移平台本身的重力大,容易陷入松软的土地中,利用履带后增大了与地面的接触面积,减小了应力。
(4)
式中:Ea为接地比压,MPa;L为履带接地长度,取2 800 mm;gn为标准重力加速度,取9.8 m/s2;b为履带板宽,取600 mm。
则:Ea=0.093 MPa。
2.2.4极限坡度运行时所需驱动力[8-9]
Fd=G(sinα+fcosα)
(5)
式中:Fd为运移平台爬坡行驶时所需的驱动力,N;α为坡度角,近海一般极限坡度角约为15°;f为滚动阻力系数,取值0.1;G为整机重力,取满载状态320 kN。
Fd=111.5 kN,符合最大驱动力范围。
2.2.5发动机匹配
根据GB/T 1147.1—2007进行计算。
履带式游艇运移平台配套用R6105IZLD型柴油机,标定功率为132 kW,转速为1 800 r/min。最高设计车速vmax=1.67 m/s,所需功率为
(6)
根据柴油机全负荷速度特性,最大转矩点的低速档行车速度va=0.89m/s。选用va=0.89 m/s,最大爬坡度为15°时,所需功率为
(7)
式中:Pf为滚动阻力消耗的功率;Pw为空气阻力消耗的功率;Pi为坡度阻力消耗的功率;η为传动效率系数,取0.82;Cd为空气阻力系数,取值0.9;ρ为空气密度,取1.29kg/m3m3;A为拖拉机前进方向迎风面积,取8 m2;va为拖拉机取低挡速度,取值4 km/h;imax为最大爬坡坡度,取tan15°。
经计算,履带式游艇运移平台满载时以最高时速行驶所需功率和低档速度爬15°坡时,所需功率为34.06 kW和122.54 kW,均小于R6105IZLD柴油机的标定功率132 kW,并有一定功率储备,故满足设计要求。
2.2.6牺牲阳极质量计算
为防止钢质运移平台被海水腐蚀,采用牺牲阳极防腐方法,参考《海洋平台建造说明书》对牺牲阳极的建造规定,根据牺牲阳极的理论公式[10]计算所需阳极总质量为
Q=ISH/η1K
(8)
式中:Q为设计所需阳极总质量,kg;I为设计的保护电流密度,A/m2;S为所需保护的面积,m2;H为设计所需保护时间,h;η1为阳极电流效率;K为所选牺牲阳极的理论发电量,(A·h)/g。
初始设定防腐设计期限为8年。以运移平台水线下面积25 m2,设计保护电路密度15 mA/m2,锌块理论发电量2(A·h)/g,锌块电流效率为0.85来计算,求出理论所需要的阳极的总质量为15.46 kg。以每块质量1.3 kg计算,共需12块。
3 样机试制与试验
完成运移平台结构设计及优化后,试制样机如图5所示。为验证整机可靠性与操作性,在青岛金沙滩试验场进行浅海试验。陆上试验场地表土壤为细密沙土,随着下海深入,变为较为平整的岩礁。对样机进行满载与空载运行测试,测试结果表明,整机运行平稳,结构稳定,能按预期作业起升快艇、高效转移人员物资,达到设计要求。

图5 样机
4 结语
针对海洋工程领域快艇、人员和物资高效转移的问题,基于TRIZ创新设计理论,设计了一种履带式近海快艇运移平台。为高效安全实现快艇与平台对接,设计中采用履带行走方式,实现平台入海功能。采用起升快艇的方式达到人员物资转移的目的,并对整机故障情况进行了应急方案设计。试验证明整机机动性能好,运行平稳,可靠性高,环境适应性强,可以满足近海人员物资的高效安全转移。
[1] 陈智. 海洋工程饱和潜水高压救生艇设计研究[D]. 上海:上海交通大学,2015.
[2] 郝瑞. 新型快艇实施海上多目标搜救的优化模型[J]. 火力与指挥控制,2013,38(11):81-83.
[3] 郭庆贺,坎杂,李景彬. TRIZ理论在自走式肉羊饲喂机零部件便捷拆卸设计中的应用[J]. 机械设计与制造,2016(4):224-227.
[4] Borgianni Y, Matt D T. Applications of TRIZ and axiomatic design: a comparison to deduce best practices in industry[J]. Procedia CIRP, 2016( 39): 91-96.
[5] Kamarudin K M, Ridgway K, Hassan M R. Modelling the conceptual design process with hybridization of TRIZ methodology and systematic design approach[J]. Procedia Engineering, 2015(131): 1064-1072.
[6] 杨雪荣,孟欢,姚丽娟,等. 基于TRIZ理论的轨检小车机械结构创新设计[J]. 包装工程,2016,37(14):16-20.
[7] 陈思源,彭伟,姚春燕. 基于TRIZ理论的新型线锯缠绕设备创新设计[J]. 机械设计与制造,2013( 1):4-6.
[8] 任长清. 履带式林间剩余物运输机的设计[J]. 林业机械与木工设备,2014,42(3):18-20.
[9] 黄涛,张豫南,田鹏. 一种履带式全方位移动平台的设计与运动学分析[J]. 机械工程学报,2014,50(21):206-212.
[10] 王义.浅析海洋平台腐蚀与防护[J]. 全面腐蚀控制,2013,27(3):8-10.