基于Simulink/Stateflow的纯电动汽车整车上下电策略
2018-03-28,,
, ,
(1.同济大学 电子与信息工程学院,上海 201804; 2.格至控智能动力科技(上海)有限公司,上海 201206)
纯电动汽车作为新能源汽车,唯一的能量来源为蓄电池。纯电动汽车具有零排放、低噪声以及结构简单的优点,其技术的发展对国家能源、环境等领域都具有重大意义[1]。纯电动汽车以蓄电池组、驱动电机和高压附件(如直流/直流(DC/DC)变换器、空调压缩机等)为动力系统,工作电流高达几百安培,一旦发生短路或者绝缘故障,将对人的生命安全产生严重威胁,因此需对动力系统施加有效管理。
在纯电动汽车中,对动力系统的有效管理通过整车控制器(VCU)来实现,动力总成电气架构如图1所示。图1中,CAN表示控制器局域网络。整车控制器负责车辆上下电流程控制、驱动决策控制、故障信息诊断处理、能量管理等关键功能的实现,对整车驾驶性能的提高以及能量利用的优化有着重要影响[2]。
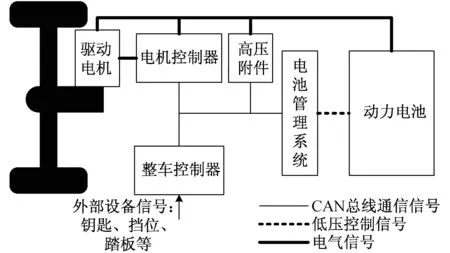
图1 纯电动汽车动力总成电气架构Fig.1 Electrical structure of power assembly for pure electric vehicle
作为整车控制器负责的功能之一,上下电是保证纯电动汽车安全启动与停机的一个必经流程,也是整车控制策略设计中的一个重要环节[3]。上下电涉及到电机控制器(MCU)、高压附件以及钥匙和踏板等多个设备,对上下电控制策略的制定需充分考虑到这些设备的工作特性及其相互之间的作用。
目前国内外纯电动汽车产量有限,对纯电动汽车整车控制策略的研究主要集中在电池管理系统以及转矩分配策略上,针对纯电动汽车上下电策略的研究并不多[4]。文献[3-5]以特定车型为基础,各自实现整车上下电策略并进行了验证。文献[6]将上下电策略分为5个阶段,在每个阶段依据系统状态定义了蓄电池组、驱动电机和高压附件的运行模式并将之抽象成状态机,然后依据状态机实现上下电策略。
1 上下电策略
为了降低开发复杂度,同时遵循软件工程高内聚低耦合的原则[7-9],本文将上电策略进行模块化分解,即低压上电和高压上电2个子模块,并分别予以实现。
1.1 上电策略
正常车况下,整车进入上电流程的主要依据为钥匙信号,本文将车辆钥匙信号设置为3挡,分别为Off挡、On挡、Start挡。上电流程主要包括低压上电以及高压上电两部分,其中低压上电由钥匙On挡的上升沿信号触发,高压上电由钥匙Start挡的脉冲信号触发。
1.1.1低压上电
一辆纯电动汽车通常包含多个电子控制单元,如电池管理系统控制器、整车控制器等。低压上电的目的如下所示:①使能部分低压附件设备(如仪表盘);②唤醒电池管理系统并与整车控制器通过CAN总线建立连接;③控制电池管理系统进行控制器自检。如果整车控制器无法在规定的时间内从CAN总线上收到电池管理系统的通信报文或者包含错误信息的报文,则整车控制器存储相应通信故障码并进入控制器通信故障下电流程;如果电池管理系统与整车控制器自检发现故障或者自检超时,则通过总线发送相应故障码至整车控制器并进入控制器通信故障下电子流程,即报故障码并关闭控制器;如果在低压上电流程中电池管理系统控制器通过自检,且无通信故障,则子控制器通过自检,然后进入预充电子流程。
由于动力总成系统中电机控制器含容性负载,如果直接导通高压继电器,产生的瞬时过大电流会直接导致母线继电器损毁,因此预充电是高压上电前必须经过的步骤。预充电原理如图2所示。

图2 预充电原理Fig.2 Precharge principle
预充电控制分直接控制与间接控制2种方法。直接控制是整车控制器直接控制预充继电器闭合进行预充;间接控制是电池管理系统控制预充继电器与主继电器的闭合与断开,然后整车控制器发送预充命令给电池管理系统从而间接地控制预充电流程。无论哪种方法,只要在规定的预充电时间内,控制器检测到的电池端电压和容性负载端电压的差值小于所设定的阈值,则预充电成功。延时闭合正极主继电器,然后断开预充继电器,即完成低压上电流程,随后进入等待状态,等待高压上电信号的到来。如果预充电失败,则进入预充电故障下电子流程,即断开预充继电器,整车控制器控制电机放电,关闭控制器并关机。低压上电流程如图3所示。
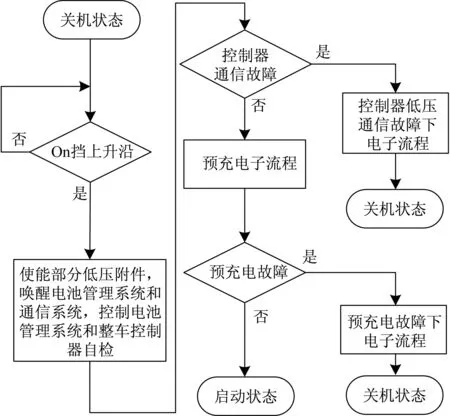
图3 低压上电策略流程Fig.3 Flow chart of low voltage power-up strategy
1.1.2高压上电
高压上电信号(钥匙Start挡脉冲信号触发)到来之后,由于低压上电流程中预充电已经完成,因此整车控制器首先唤醒电机控制器与整车控制器以建立CAN总线连接,然后进行自检。如果电机控制器自检发现故障或者通信发生故障,则通过总线发送故障信号至整车控制器并进入电机控制器通信故障下电子流程,即报故障码,断开主继电器,整车控制器控制电机放电,然后关闭控制器进入关机状态。如果电机控制器自检通过并且通信正常,则整车控制器使能车载高压附件并检测其工作状态,若检测无故障且均处于正常工作状态,则整车进入Ready状态,整车控制器控制踏板电源开启,驱动电机正常给电,上电流程完成;若检测到故障,则进入高压附件故障下电子流程,即报故障码,关闭高压附件,断开主继电器,控制驱动电机放电,最后关闭控制器进入关机状态。高压上电流程如图4所示。
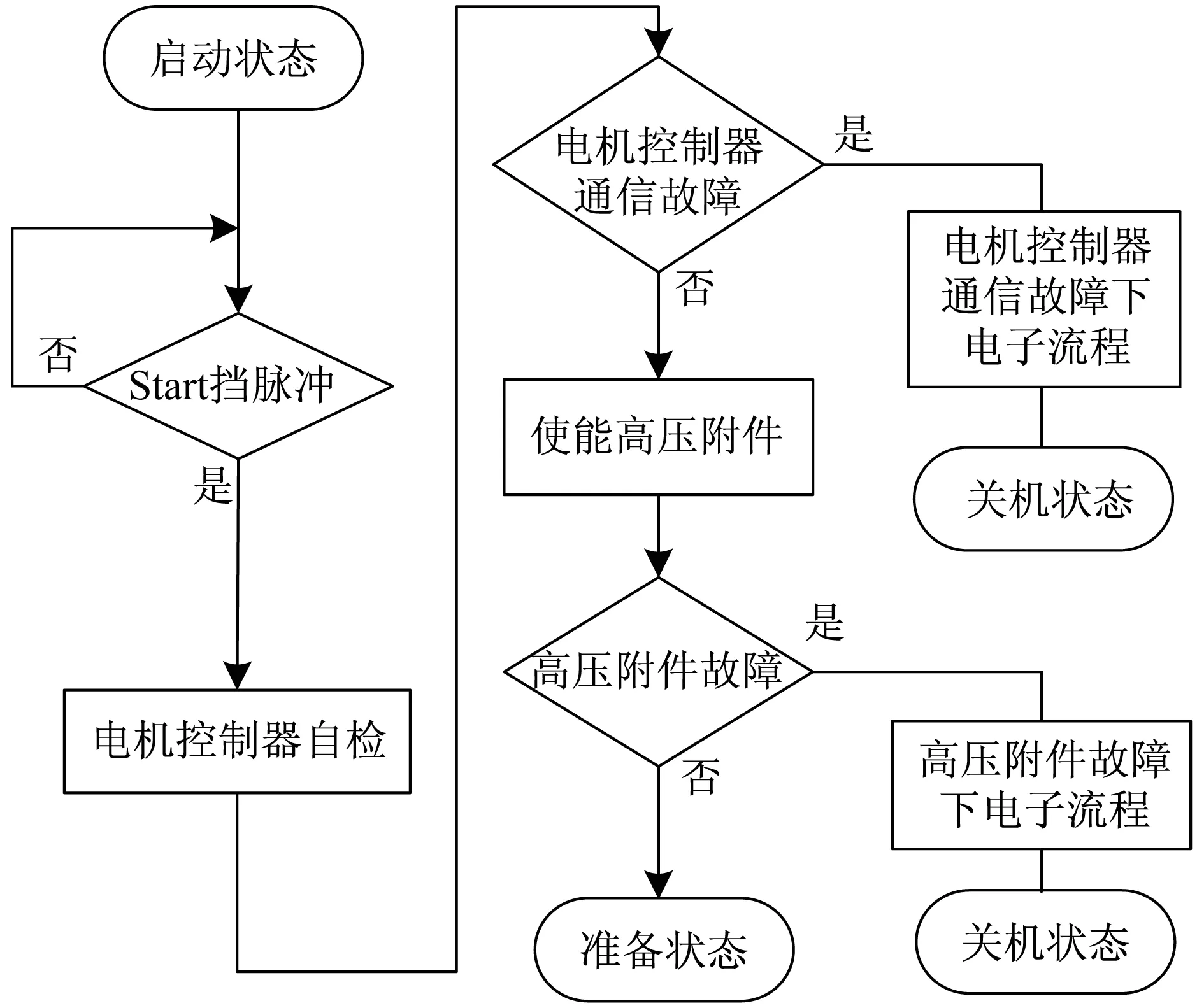
图4 高压上电策略流程Fig.4 Flow chart of high voltage power-up strategy
1.2 下电策略
本文将下电策略分为正常下电策略与紧急下电策略并分别予以实现。
1.2.1正常下电策略
在不发生故障的前提下,下电信号(钥匙On挡的下降沿信号触发)到来,进入正常下电流程。为了防止驾驶员误操作以及考虑到驾驶员与车辆的安全性,此时整车控制器需监测车速,只有当车速处于绝对低速(如5 km·h-1)的情况时,整车控制器才可以控制驱动电机,使得电机转矩清零;控制高压附件离开工作状态并进入待机状态,断开高压主继电器,此时控制器端容性负载依旧带高压电,因此整车控制器需控制电机控制器主动放电,将控制器端电压降到设定的安全电压,则主动放电完成;放电完成后各子系统进入睡眠状态,经过一段延时整车系统进入关机状态。正常下电流程如图5所示。
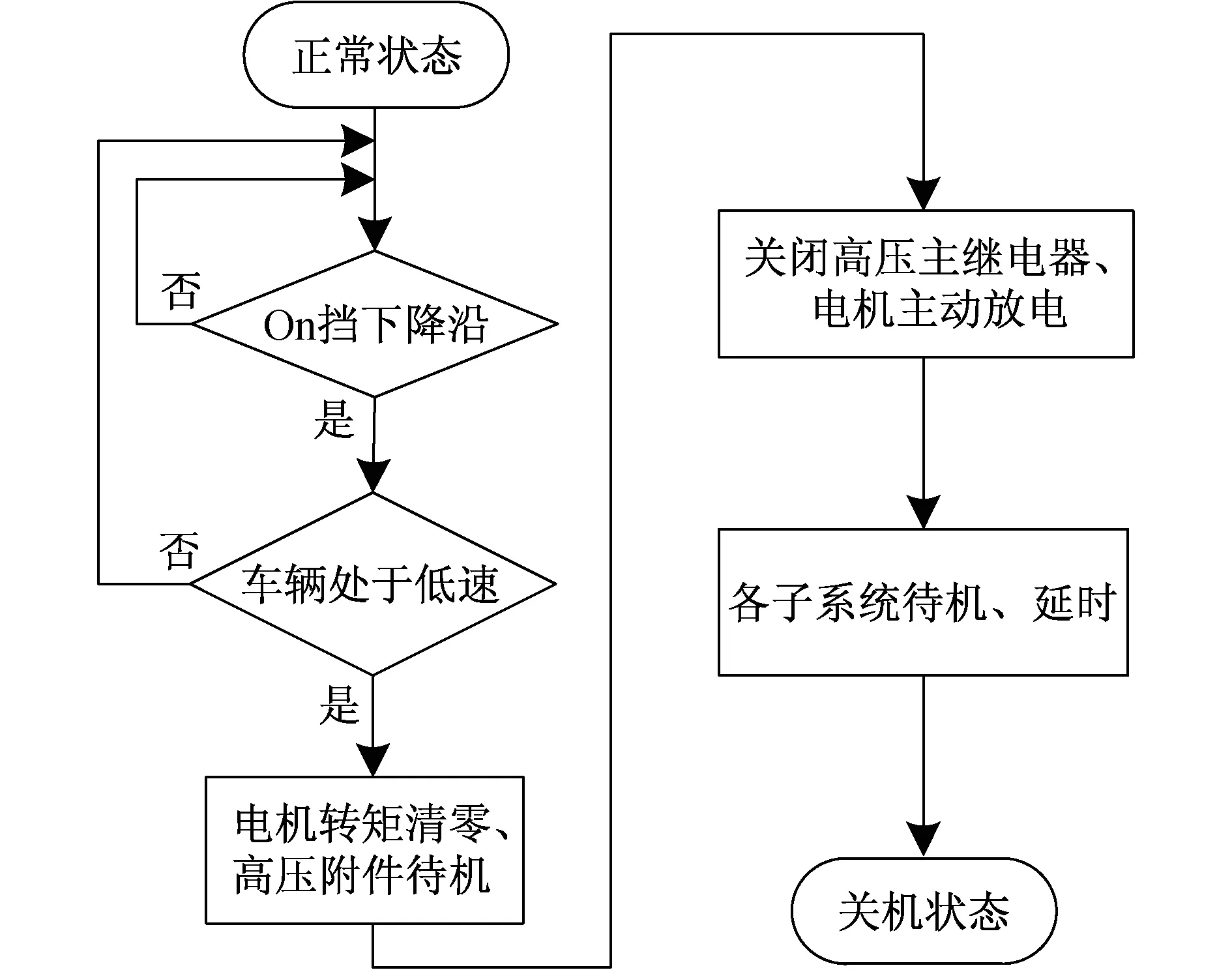
图5 正常下电策略流程Fig.5 Flow chart of normal power-down
1.2.2紧急下电策略
紧急下电可发生在任何工况中,如运行、启动、停机等。在实际工程中,整车故障分类比较复杂,其中较常见的为按故障严重程度进行等级分类,低等级故障处理方式为报警,中等级故障处理方式为降载跛行,高等级故障处理方式为停机[10]。当出现低等级故障或中等级故障时,整车控制器控制电池管理系统降低充放电功率,但其下电逻辑与正常下电一致;当出现高等级故障时必须执行紧急下电策略,如不采取紧急下电策略或采取策略不当,则会损毁动力系统甚至威胁驾驶员的生命安全。本文以车辆运行状态为例,车辆在运行过程中出现严重故障(如电池长时间严重过温)后,整车控制器检测到该故障,首先仪表报警提示,然后整车控制器发送指令控制电机转矩清零并使高压附件离开工作状态,待确认直流母线电流接近零后,整车控制器切断高压主继电器并请求电机控制器进行紧急放电操作,经过延时后系统进入故障关机状态,处于此状态时整车无法再次上电,必须修复故障并使用专业诊断工具清除故障信息才能使整车再次上电。紧急下电流程如图6所示。
2 策略实现

图6 紧急下电策略流程Fig.6 Flow chart of urgent power-down
Stateflow软件是集成于Simulink软件中的图形化设计与开发工具,其基础为有限状态机理论。Stateflow软件通过对状态图、流程图的创建,实现事件驱动系统的建模和仿真。Stateflow软件可以实现对控制对象的建模,完成状态逻辑的切换以及进行复杂逻辑的可视化开发,在汽车领域与嵌入式领域应用广泛[11-12]。
上下电逻辑主要由钥匙信号与系统故障信号驱动,可以抽象为事件驱动系统。钥匙信号与系统故障信号的驱动可以抽象为状态转移,这与Simulink/Stateflow软件的机理相契合。本文基于Simulink/Stateflow开发环境实现了上述上下电策略。信号名称与说明如表1所示。
2.1 低压上电逻辑实现
在Stateflow软件中实现的低压上电策略如图7所示。系统检测到钥匙On挡上升沿信号(KeyPos==1)时,部分信号需进行初始化(Standby状态)。依据低压上电逻辑(LowPower状态),首先整车控制器使能并自检,随后唤醒电池管理系统进行自检和通信检测。若无故障则进入预充电流程(Wait_PreChrg状态),否则上报故障码(ECU_Fault状态)并进入下电流程(LowPowerDown状态);若预充电无故障则进入高压上电等待状态(PreChrg_Success状态),否则上报故障码(PreChrg_Fail状态)并进入下电流程。
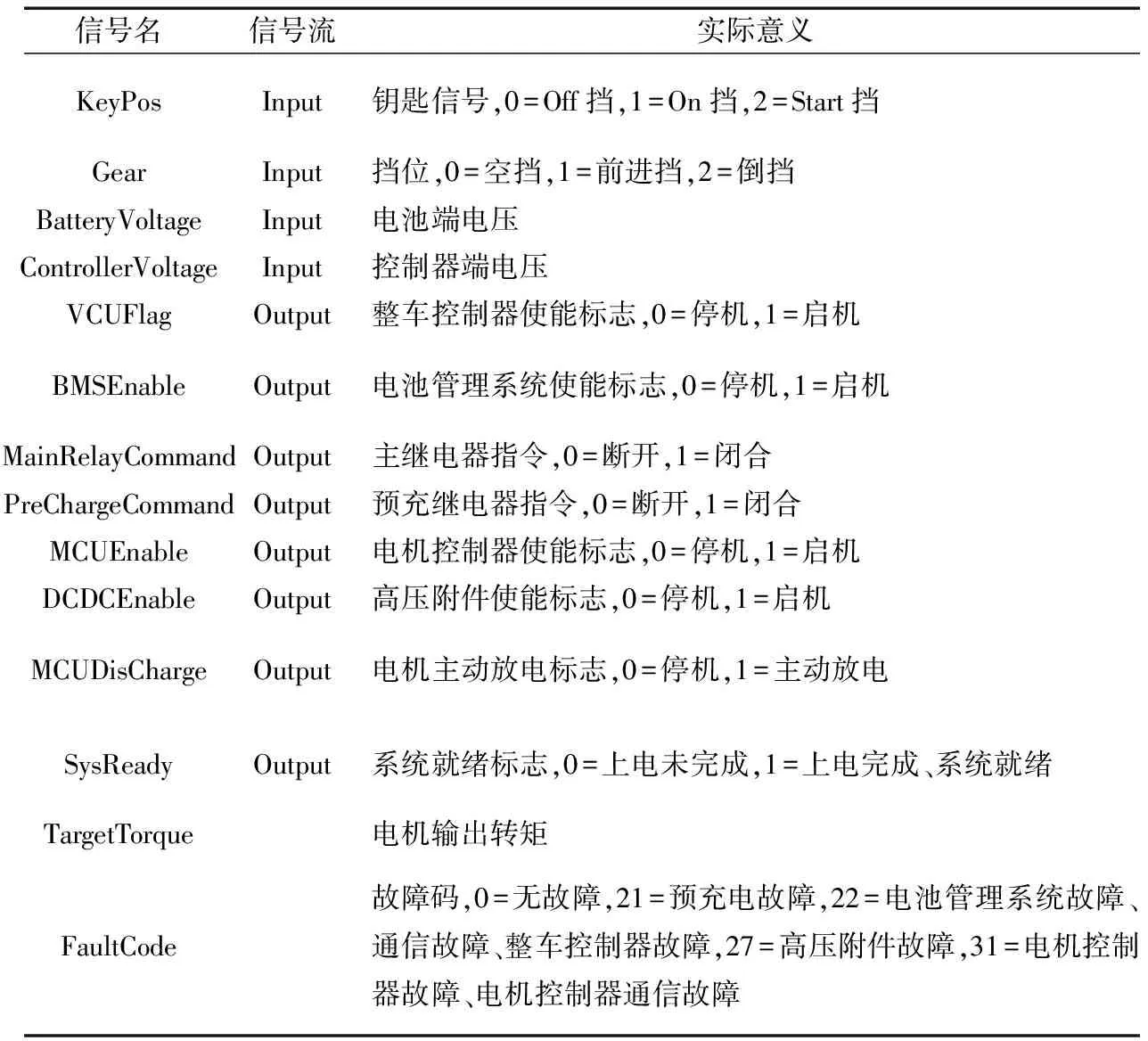
表1 上下电模型信号说明
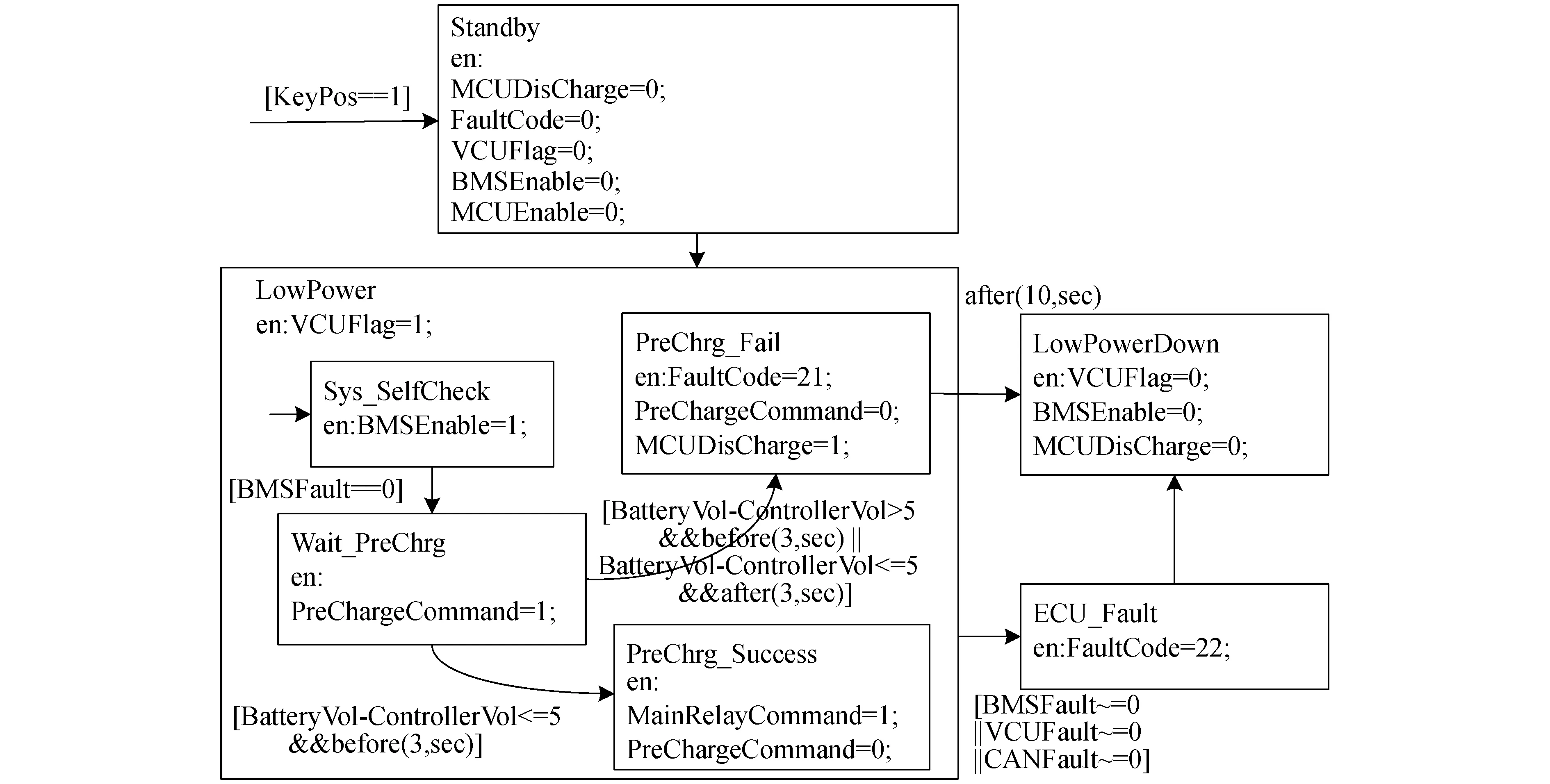
图7 低压上电策略实现Fig.7 Realization of low voltage power-up strategy
2.2 高压上电逻辑实现
在Stateflow软件中实现的高压上电策略如图8所示。依据高压上电逻辑(HighPower状态),系统在高压上电等待状态(PreChrg_Success状态)检测到钥匙Start挡脉冲信号(KeyPos==2)后,首先唤醒电机控制器进行自检和通信检测(MCU_Check状态),若无故障则继续使能高压附件(HVACC_Check状态),否则上报故障(MCU_Fault状态)并进入下电流程(HighPowerDown状态)。仿真模型中高压附件只以DC/DC变换器为例,若高压附件无故障,则进入就绪状态(VCU_Run状态),否则上报故障(HVACC_Fault状态)并进入下电流程。
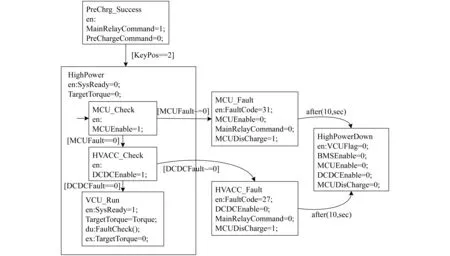
图8 高压上电策略实现Fig.8 Realization of high voltage power-up strategy
2.3 正常下电逻辑实现
在Stateflow软件中实现的正常下电策略如图9所示。系统在检测到On挡下降沿(KeyPos==0)信号后,首先电机力矩清零,然后高压附件(HVACC_Off状态)关闭,当检测到车速小于设定车速5 km·h-1时,系统控制高压主继电器断开,电机主动放电(PowerDown状态),经过一段延时后系统进入关机状态(Sys_Off状态)。
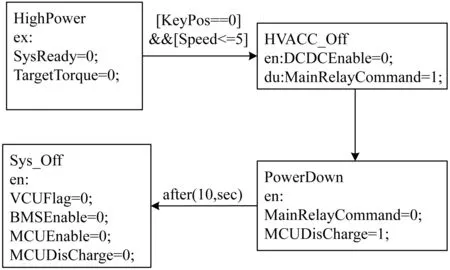
图9 正常下电策略实现Fig.9 Realization of normal power-down strategy
2.4 紧急下电逻辑实现
在Stateflow软件中实现的紧急下电策略如图10所示。系统运行时检测到故障信号(FaultCode~=0)后,仪表通过故障码类型报警,首先电机力矩清零,然后高压附件(HVACC_Down状态)关闭,确认母线电流接近零后,系统控制高压主继电器断开,电机紧急放电(Fault_PowerDown状态),经过一段延时后系统进入关机状态(Fault_Off状态)。此时考虑到安全性,无论钥匙进行任何动作,均不能影响系统紧急下电。
3 结果分析
在Stateflow软件中搭建纯电动汽车仿真模型。设置预充电两端电压差值为电池端电压的5%,电池端电压恒定为100 V,最大预充电时间为3 s,限定低速为5 km·h-1,放电电压阈值为36 V,整车关机前的延时设定为10 s,上述测试数据在实际工程中均可根据实际工况标定或调整。基于以上实现逻辑与设定的测试数据,给定典型输入,仿真验证上下电逻辑的正确性。
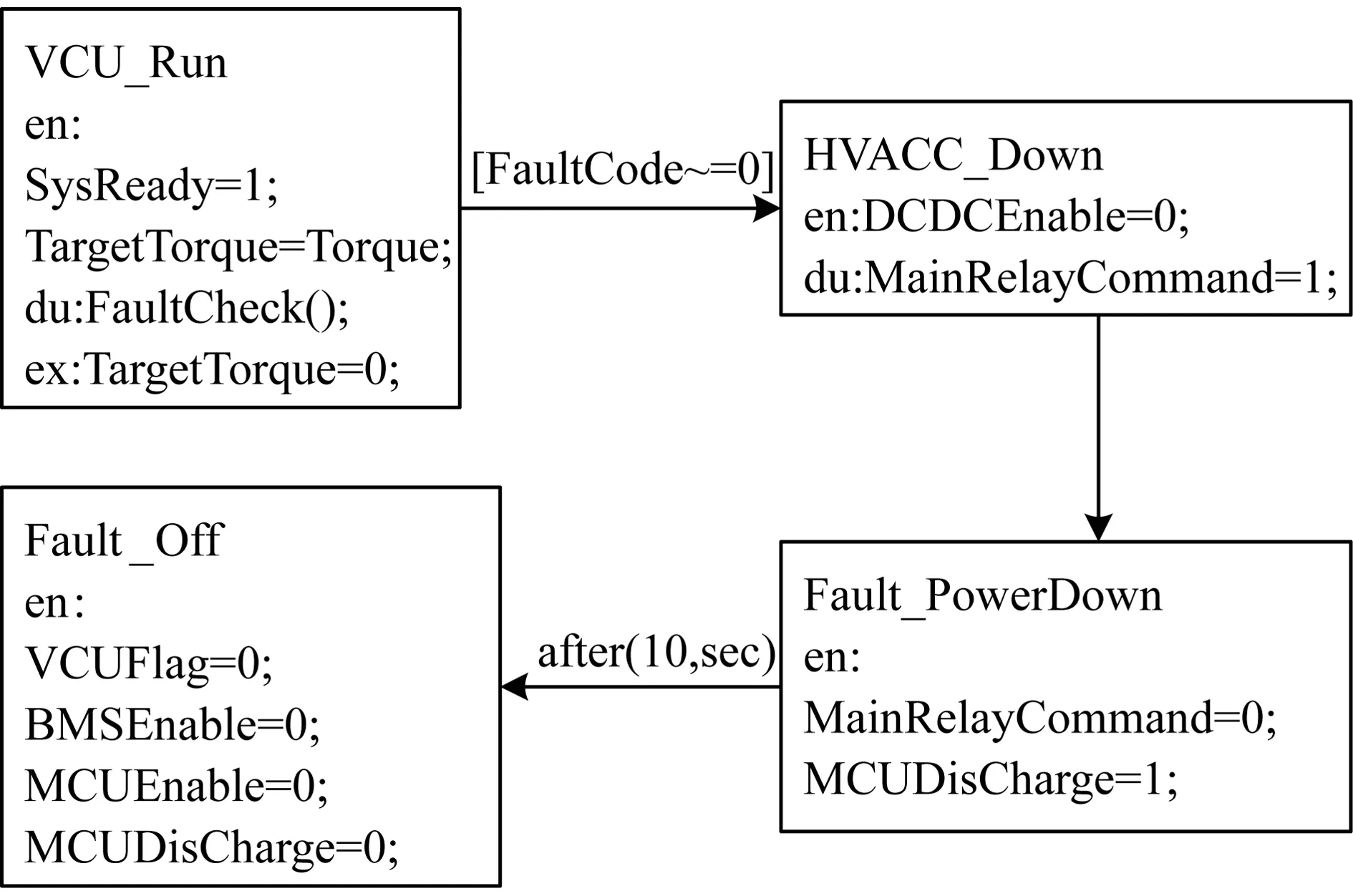
图10 紧急下电策略实现Fig.10 Realization of urgent power-down strategy
3.1 正常上电
给定输入信号时序如图11所示。KeyPos表示钥匙信号,Gear表示挡位信号,BatteryVoltage表示蓄电池端电压,ControllerVoltage表示控制器端电压。
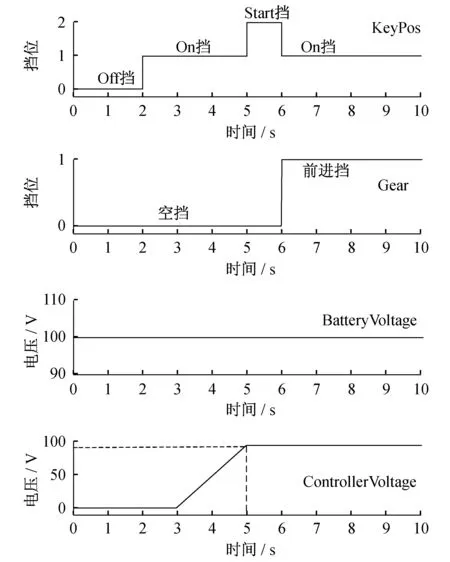
图11 正常上电输入信号Fig.11 Normal power-up input signal
输出结果如图12所示。
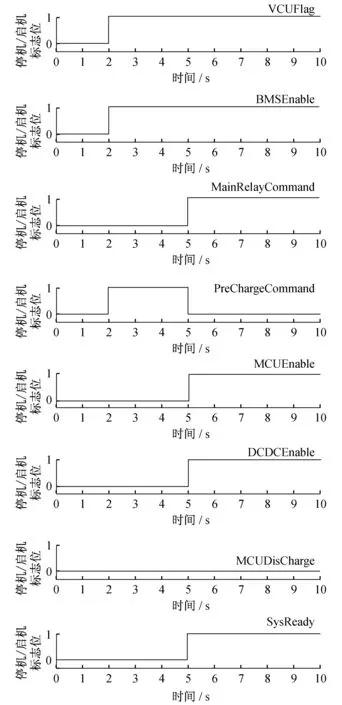
图12 正常上电输出信号Fig.12 Normal power-up output signal
如图11和图12所示,当t=2 s时,系统检测到钥匙On挡上升沿信号,此时开始低压上电。首先整车控制器开始工作,整车控制器标志位VCUFlag置1,然后整车控制器唤醒电池管理系统进行自检和通信检测,电池管理系统标志位BMSEnable置1,检测无故障。当t=3~5 s时,整车控制器控制预充继电器闭合并开始预充电,PreChargeCommand置1,程序内设置控制器端电压ControllerVoltage从0到95 V,电池端电压BatteryVoltage设置为100 V,符合预充电完成条件。主继电器MainRelayCommand在t=5 s时置1,预充继电器PreChargeCommand置0,然后钥匙Start挡脉冲信号到来,开始高压上电。整车控制器唤醒电机控制器和高压附件进行自检和通信检测,电机控制器和高压附件标志位MCUEnable与DCDCEnable置1,检测无故障,上电完成。此时SysReady标志位置1,之后挡位挂在前进挡1,车辆进入行驶模式。
3.2 正常下电
给定输入信号时序如图13所示。
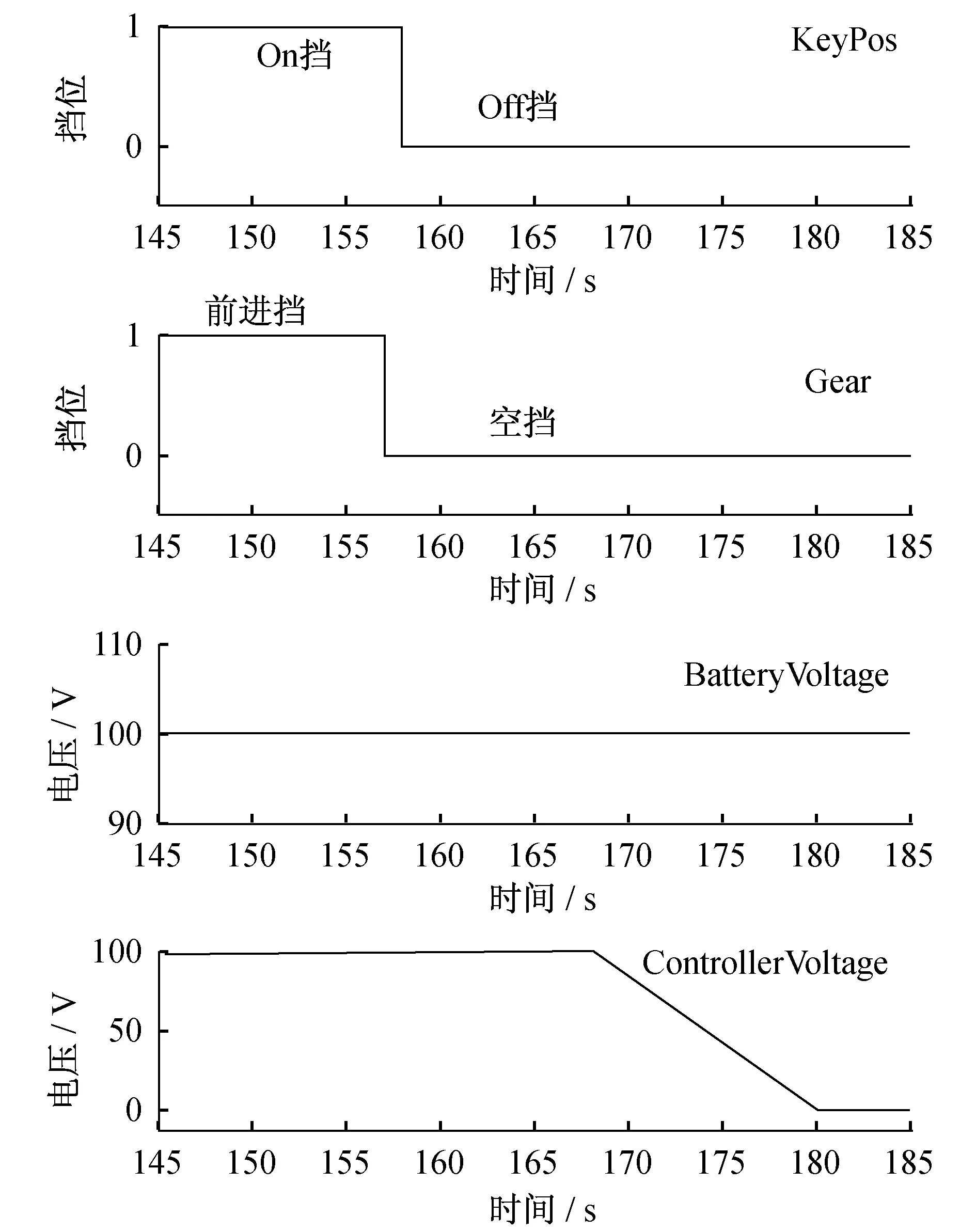
图13 正常下电输入信号Fig.13 Normal power-down input signal
输出结果如图14所示。
如图13和图14所示,当t=158 s时,系统检测到钥匙On挡下降沿信号,此时车速高于5 km·h-1(见图15),故无法进入正常下电流程;当t=168 s时,车速低于5 km·h-1,此时系统才进入正常下电流程,SysReady标志位置0。电机转矩清零,高压附件标志位DCDCEnbale置0,然后断开高压主继电器,高压主继电器标志位MainRelayCommand置0。整车控制器发送主动放电指令至电机控制器,使电机进行主动放电操作,即MCUDisCharge标志位置1。控制器端电压ControllerVoltage降到设定阈值36 V,且经过程序设置的10 s延时,放电完成,MCUDisCharge标志位置0。整车控制器、电池管理系统、电机控制器依次关机,SysReady标志位置0,整车进入关机状态,最终各个标志位均置0。
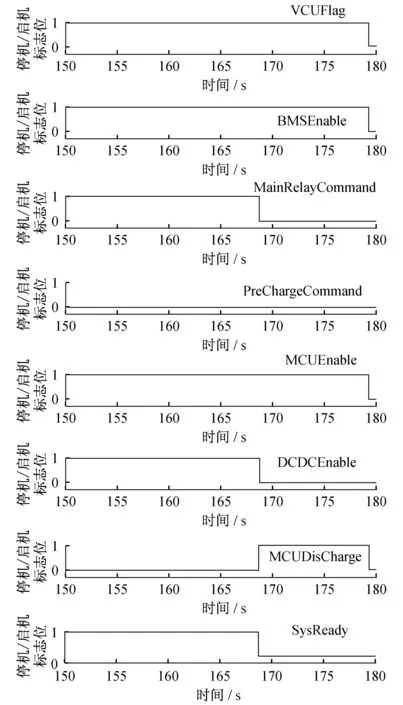
图14 正常下电输出信号Fig.14 Normal power-down output signal
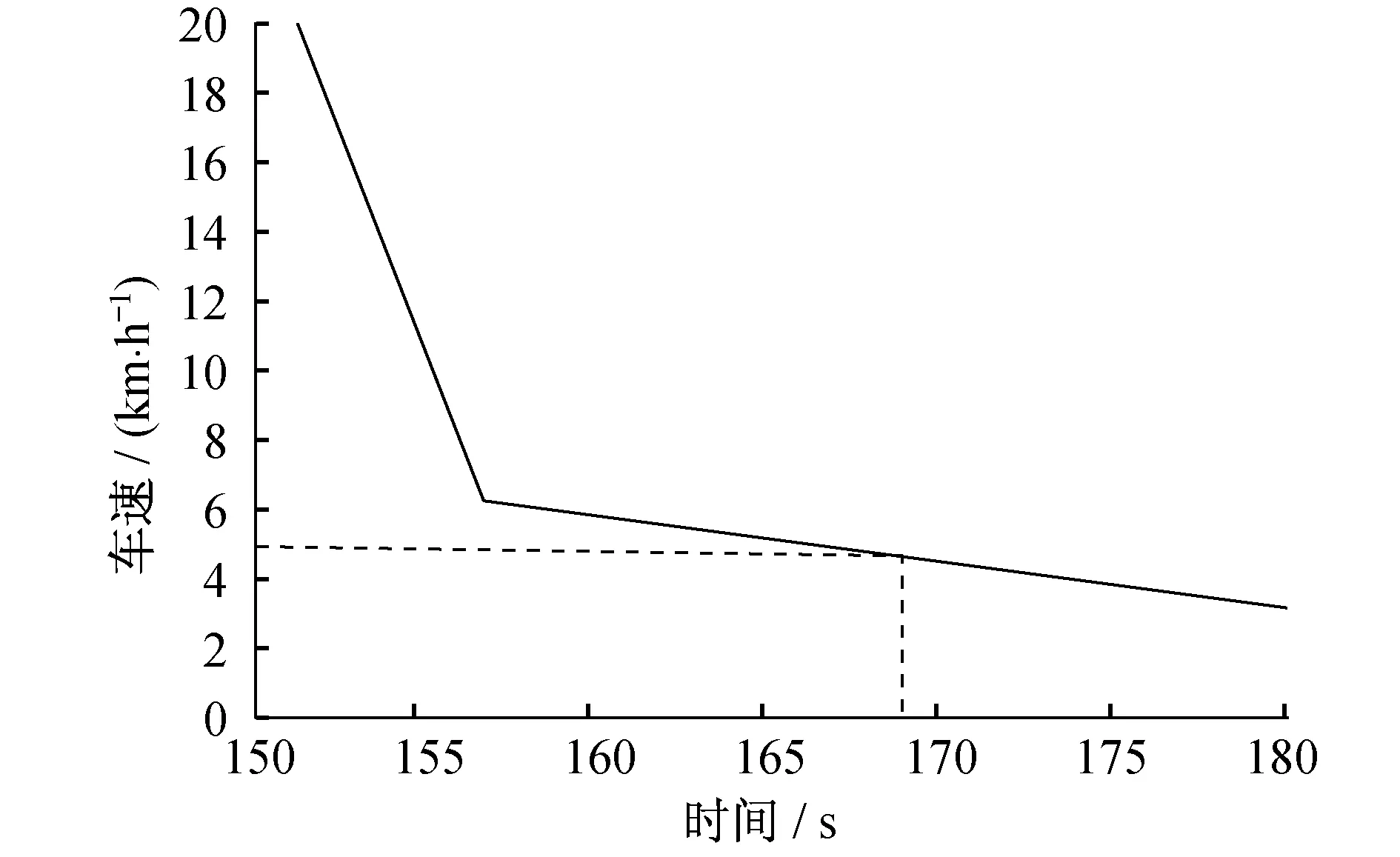
图15 车速信号Fig.15 Vehicle velocity signal
3.3 紧急下电
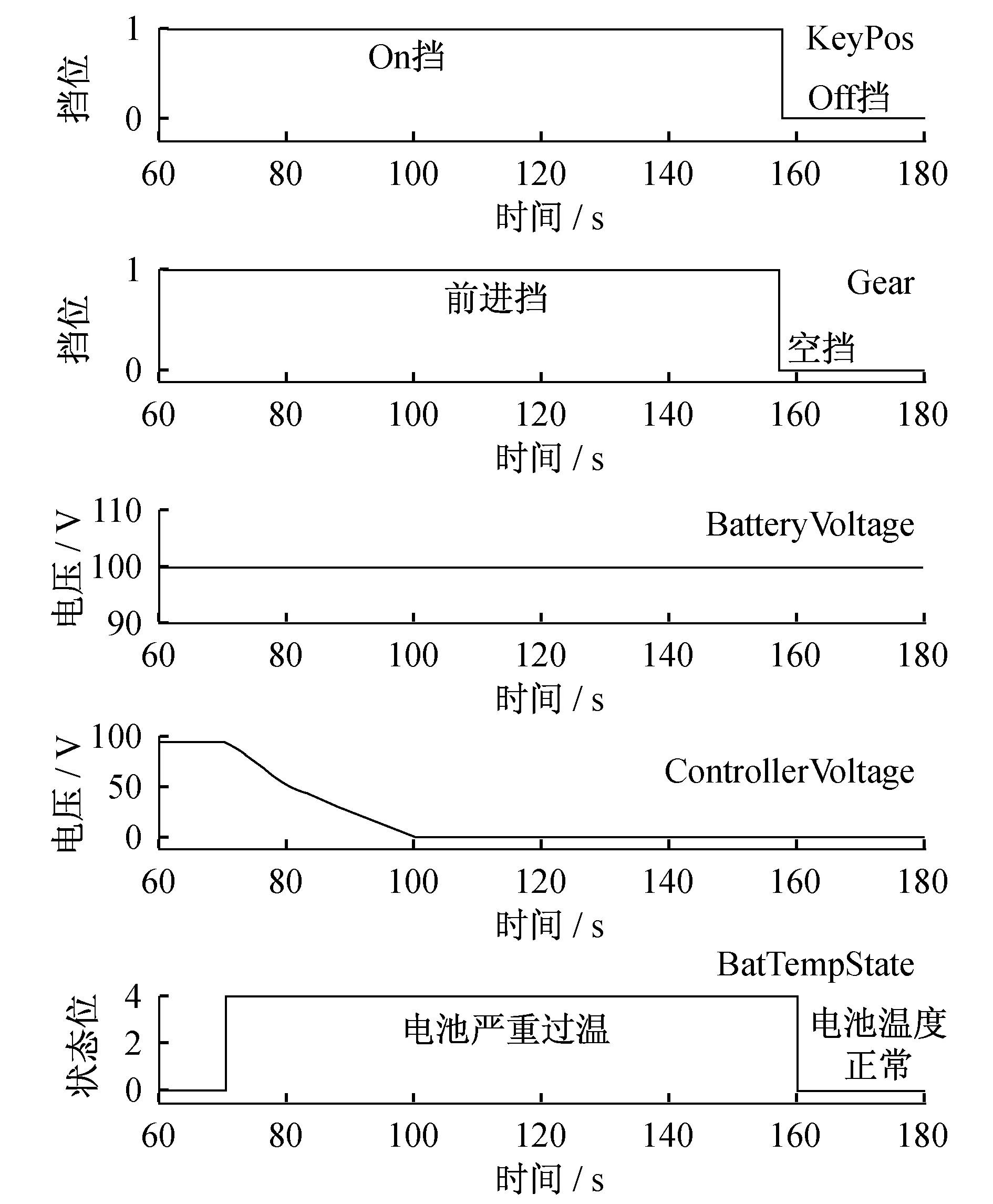
图16 紧急下电输入信号Fig.16 Urgent power-up input signal
给定输入信号时序如图16所示,BatTempState表示蓄电池组长时间过温故障。
输出结果如图17所示。
如图16和图17所示,当t=70 s时系统检测到电池长时间严重过温故障(BatTempState=4),此时虽然钥匙On挡下降沿信号(t=158 s时On下降沿到来)没有到来,但是由于检测到严重故障,因此直接进入紧急下电流程。首先SysReady置0,高压附件关闭即DCDCEnable置0,然后断开高压主继电器,MainRelayCommand置0,接着整车控制器控制电机紧急放电,MCUDisCharge置1,控制器端电压ControllerVoltage快速降到阈值36 V,最后经过一段延时后整车进入关机状态,各个标志位均置0。
4 结语
本文开展了上下电策略研究。将上电策略进行模块化分解,分为低压上电和高压上电2个子模块,降低了策略实现的难度;在正常下电策略的研究中,增加了速度反馈,显著提高了正常下电策略的安全性。基于Simulink/Stateflow开发环境对这些子策略分别予以实现,仿真结果表明该实现与期望保持一致。基于Simulink/Stateflow实现的策略在实际工程中有很大的应用价值。
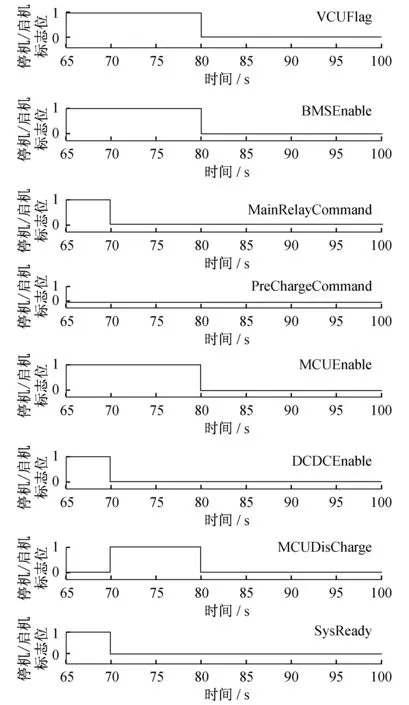
图17 紧急下电输出信号Fig.17 Urgent power-up output signal
[1] 谢明洁.电动汽车发展现状及前景[J].中国科技信息,2013(22):120-122.
XIE Mingjie.Current situation and prospect of electric vehicle[J].China Science and Technology Information,2013(22):120-122.
[2] 符兴锋,翟艳霞,肖莎,等.增程式纯电动汽车动力电池高压电安全管理[J].汽车技术,2014(10):44-49.
FU Xingfeng,ZHAI Yanxia,XIAO Sha,et al.Power battery high voltage safety management for extended ranged electric vehicle[J].Automobile Technology,2014(10):44-49.
[3] 薛念文,马先萌,盘朝奉.插电式纯电动汽车上下电控制策略研究与设计[J].重庆交通大学学报(自然科学版),2012(5):1087-1089.
XUE Nianwen,MA Xianmeng,PAN Chaofeng.Study and design of power up and power down control strategy of plug-in electric vehicle[J].Journal of Chongqing Jiaotong University (Natural Science Edition),2012(5):1087-1089.
[4] 田晟,裴锋,李拾程. 纯电动汽车上下电及电池管理系统故障控制策略[J].华南理工大学学报(自然科学版),2016(9):107-115.
TIAN Sheng,PEI Feng,LI Shicheng.Control strategy of power on and power off of EV and fault of battery management system[J].Journal of South China University of Technology(Natural Science Edition),2016(9):107-115.
[5] 李东艳,张云秀,脱建智.电动汽车高压上下电控制电路及系统研究[J].信息技术与信息化,2016(6):80-82.
LI Dongyan,ZHANG Yunxiu,TUO Jianzhi.Research on high voltage control circuit and system of electric vehicle high voltage[J].Information Technology and Informatization,2016(6):80-82.
[6] WANG Hongyu,LI Zhiming,FANG Yong,et al.Study on high voltage power up down control strategy of pure electric vehicles[C]∥The 6th IEEE International Conference.[S.l.]:IEEE,2015:624-628.
[7] International Energy Agency.Global-EV-outlook 2015[R].Paris:IEA,2015.
[8] DI DOMENICO D,CREFF Y,PRADA E,et al.A review of approaches for the design of Li-ion BMS estimation functions[J].Oil & Gas Science and Technology,2013,68(1):127-135.
[9] URE N K,RAISEMCHE A,BOUKHNIFER M,et a1.Two active fault-tolerant control schemes of induction-motor drive in EV or HEV[J].IEEE Transactions on Vehicular Technology,2014,63(1):19-29.
[10] 符兴锋,周斯加,龙江启.电动汽车动力电池安全管理研究及验证[J].汽车技术,2013(9):40-44.
FU Xingfeng,ZHOU Sijia,LONG Jiangqi.Study and verification of the safety of HVB system on EV[J].Automobile Technology,2013(9):40-44.
[11] 张威.Stateflow逻辑系统建模[M].西安:西安电子科技大学出版社,2007.
ZHANG Wei.Stateflow logic system modeling[M].Xi’an:Xidian University Press,2007.
[12] 陈永光.基于模型设计在汽车控制系统开发中的运用[J].汽车制造业,2012(1):17-18.
CHEN Yongguang.Application of model design in the development of automobile control system[J].Automobile Manufacturing Industry,2012(1):17-18.
