Pekeris水声波导环境中声压信号采样时段对船舶声源级评定的影响研究
2018-03-28邹明松刘树晓
邹明松, 刘树晓
(1.中国船舶科学研究中心,江苏 无锡 214082; 2.深海载人装备国家重点实验室,江苏 无锡 214082;3.船舶振动噪声重点实验室,江苏 无锡 214082)
在实际海洋水声环境中,如何科学地评定一艘船舶的水下辐射噪声量值是工程中十分关注的、存在一定争议的问题,是一个较为复杂的声学问题,涉及到海洋背景下的信噪比、船舶周围的近场和远场声分布、声压信号的采集与处理方法、船舶所处的海洋环境水声传播规律以及船舶航速和潜深等诸多因素。国内外建有一批各具特色的船舶水下辐射噪声测试试验场及配有相应的测试规程,采用单水听器、线阵等方式测试评定船舶的辐射噪声[1-2]。当采用单水听器测试时,如何选取声压信号的采样时段对声源级的换算评定有较显著影响,国内外并无统一的标准。目前,为便于工程上的实际操作,在实船测试中往往截取信号能量最强的特定长度(如8 s左右)的声压时域测试数据,通过Fourier变换获取与该时间段对应的辐射噪声频谱,再换算出声源级。这种测试处理方式是工程经验性的,其科学性如何,并无较强的理论根据,更没有通过仿真计算进行过规律性的定量分析和总结。整体而言,这是一个需要通过计算研究去指导工程操作、优化工程操作的问题,是一个值得关注和探讨的问题,但目前未见有深入的研究和报道。
国内已具备开展复杂船舶结构流固耦合振动与水下声辐射大规模仿真计算的能力[3-4],这为针对上述问题开展计算研究提供了很好的基础。特别是近年来,人们发现海洋水声环境对船舶周围的辐射声场存在不可忽略的影响,将浮体结构水中声辐射的计算研究,从无界理想声介质环境拓展到近似考虑水面和水底边界影响的声场环境[5-6]。Zou等[7-8]将船舶三维水弹性力学理论与水声信道理论相结合,建立了船舶三维声弹性理论,为开展海洋水声环境中船舶流固耦合振动、声辐射与声传播的统一分析提供了一种前所未有的方法,且理论上具有较广泛的适用性。在船舶三维声弹性理论基础上开发出的THAFTS-Acoustic软件,其准确性和实用性经过数值算例与试验的多重考核验证,已经可以方便地实现Pekeris水声波导环境中船舶流固耦合振动、声辐射与声传播的集成计算[9]。
Pekeris水声波导模型是一种较常用的浅海水声环境模型,能够较好地反应浅海水声环境的特点。因此,采用现有的船舶三维声弹性计算方法及THAFTS-Acoustic软件,能够计及海面和海底边界的影响,对浅海中的实船测试问题进行较准确的仿真计算,为本文中所述问题的研究提供了优良的基础。本文正是采用该理论方法和软件,进行建模计算,首次探讨了浅海Pekeris水声波导环境中用正横方向的观察点获取船舶在机械激励下的辐射噪声声源级时,声压信号采样时间段的影响规律;首次以定量数值计算结果为支撑,给出了有助于更全面地获取船舶辐射噪声频谱特征及使得观察结果更加稳定的声压信号采样时段选取的指导性建议。
1 计算模型和水声环境
假定观察点位于船体舷侧,离船体轴线的距离小于船长,相对空间固定坐标系静止。当船舶以航速U匀速沿直线航行时,观察点相对于船舶以速度U反方向运动,观察点处的声压也随着船舶的运动而变化。在浅水环境中,船体周围的声场分布与船内激励源分布、船体各部分声辐射效率和海底、海面声反射等因素密切相关。往往在船舶艏部、中部、艉部区域的声场分布并不相同,选取不同时间段的声压信号(对应观察点相对船体的不同空间位置)换算出的声源级也将是不同的。如何选取时间信号,能够较全面的反映船舶的辐射噪声频谱特征和噪声级量值水平,将是本文要探讨的内容。

图1 单层壳船体结构计算模型Fig.1 Computational model of the single shell ship structure
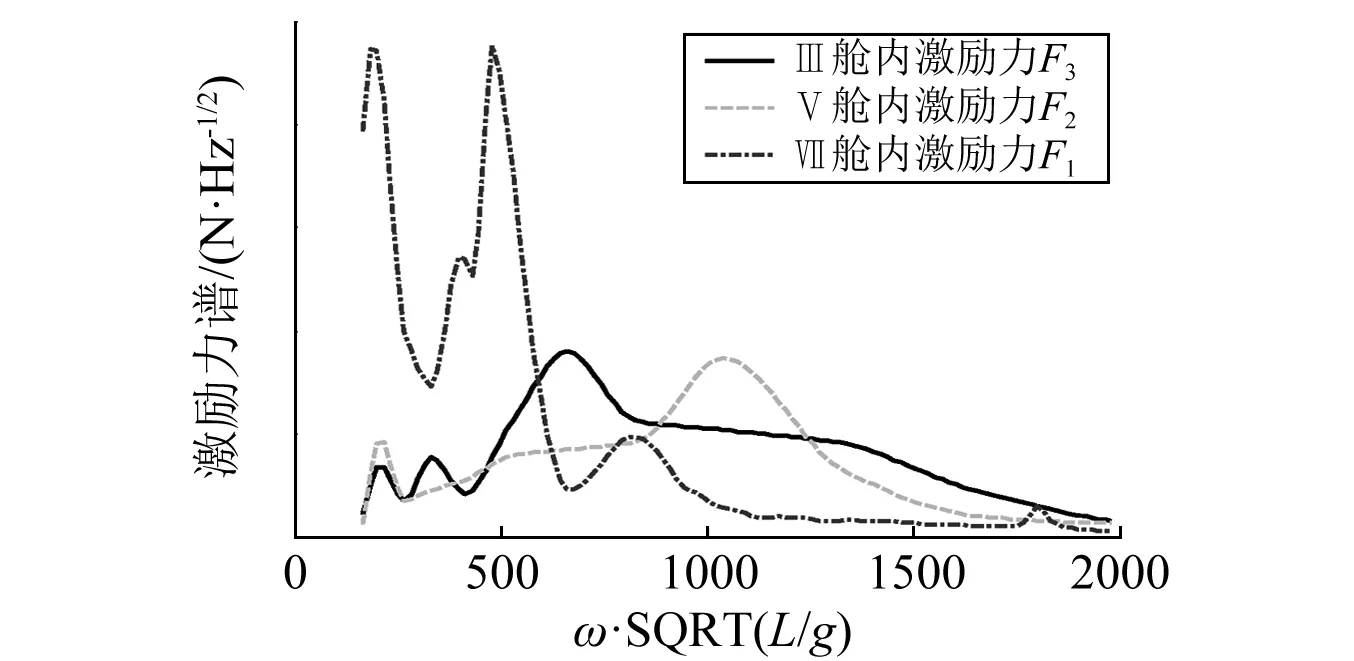
图2 由3台典型机械设备引起的激励力谱Fig.2 Excitation force spectra induced by three typical mechanical equipments
采用表1所示参数的Pekeris水声波导计算环境(见图3),分析选取不同采样时段的声压信号对船舶声源级评定的影响。表中海底声学参数的取值与某浅海海域的声学参数较接近,声波垂直入射到海底时的声反射系数为0.465 2。表中的潜深是指船体重心离水面的距离。
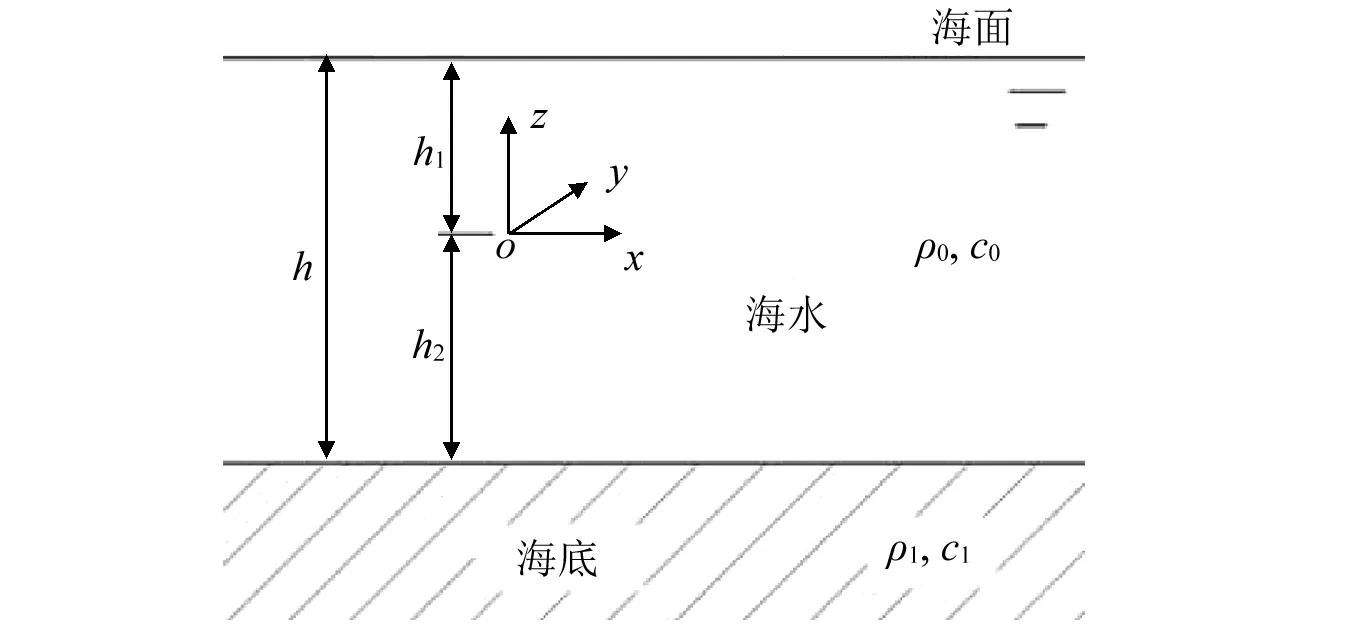
图3 具有压力释放海面和可透声液体海底的Pekeris波导Fig.3 Pekeris waveguide with boundary release sea surface and liquid seabed allowing sound transmission

水深潜深海水密度ρ0海水声速c0海底密度ρ1海底声速c165m30m1025kg/m31500m/s2600kg/m31620m/s
2 计算分析的基本方法
图1中的模型以6 kn速度沿直线航行,在左舷设置两个固定不动的观察场点,离船体轴线的距离分别为0.5L和0.8L,且都在船体纵轴线所处的水平面内,见图4所示,其中的3个圆点对应图2所示的3个集中力作用点。从相对运动的角度进行分析,可将船看成静止,观察点运动,整个声压信号是在一条直线段上测得的,直线段上的每一点具有相对于船体的不同空间位置,如图4中的“1号观察点相对平移线”和“2号观察点相对平移线”。
图4 相对运动观察点对应的计算工况示意图Fig. 4 A sketch of the computation cases corresponding to the observation points for relative motion
采用表1中的环境参数,使用THAFTS-Acoustic软件计算出观察点相对平移线上各场点的频域声压结果。考虑到观察点的位置相对于船舶在移动,在每一个采样时刻,必须采取观察点到新位置x-Ut处该时刻的声压值,因此,有必要将频域声压的幅值与相位谱转化到时域中,此时的声压公式为
cos{ωnt+arg[p(x-Ut,y,z,ωn)]}
(1)
式中:t为时间;U为船舶航速;(x-Ut,y,z)为观察点的空间坐标,相对于随船运动的平衡坐标系,它随时间t变化;p(x-Ut,y,z,ωn)为空间坐标(x-Ut,y,z)点处角频率ωn处的声压谱值,由激励力谱与声辐射传递函数相乘得到;Δω=ωn+1-ωn;arg[]为取相位角。
本文选取声压最强的时间段换算辐射噪声级(这是实船测试中较常采用的方法),先考虑取该时间段为8 s。总的时域计算的区间为0~81 s,相当于船舶移动了250 m。计算(tn~tn+8)时间段内的声压均方根值,其中tn=0,1,…,73,通过比较声压均方根值的大小,确定用于换算辐射噪声级的tn取值。再通过加窗Fourier变换并结合重叠平均的韦尔奇(Welch)方法计算功率谱,得出频域内的声压谱值,再转化成距船体轴线1 m远处的声源级(声压参考值为1×10-6Pa)。
3 不同的8 s采样时段对换算声源级的影响
图5给出了两个观察点处的时域声压曲线。图6给出了不同8 s长时间段对应的声压均方根值(其中纵坐标表示的声压均方根值已相对最大值作了归一化),可用于确定换算辐射噪声级的tn取值。综合考虑图6所示的两个观察点的声压均方根曲线之后,确定选取tn=28、35、39,亦即28~36 s、35~43 s和39~47 s这3个时间段信号,通过Fourier变换计算声压频谱,转化成距船体轴线1 m远处的声源级,结果如图7所示。可见:取不同8 s时间段信号换算出的声源级存在一定差异;图中A、B、C3个峰值处的差异也较明显,最大达到7.4~8.0 dB;且不同时间段对应的最高峰值频率也不同,说明考察船舶噪声时,如选定较固定的8 s时间段(观察点相对移动位置较固定),则给出的噪声级频谱可能会漏掉实际存在的较显著的峰值特征。
图5 离船体轴线不同距离的观察点的时域声压曲线Fig. 5 Time domain sound pressure curves at observation points with various distance from the axis of the hull

图6 两个观察点在不同8 s时间段内 (a)离船体轴线距离为0.5L的观察点 (b)离船体轴线距离为0.8L的观察点 的声压均方根曲线 换算出的声源级 换算出的声源级Fig. 6 Sound pressure rms values of 8 s time 图7 不同8 s时间段换算出的声源级结果 intervals at two observation points Fig. 7 Sound source level transformed from various 8 s time intervals
4 采样长度对声源级换算的影响
6 kn航速下,对一艘70余米长的船,8 s时间的运动段长度一般在1/3船长左右。本算例中,III舱与VII舱之间激励源的空间距离约为0.55倍的船长,船体声辐射对应的声源特征长度(指对辐射噪声起主要贡献的船体湿表面的跨度,与船长、船体不同部位结构强弱、船内激励源分布以及频率等因素有关)可认为介于0.55~1倍的船长之间。因此,只取一个8 s时间对应的空间跨距不能覆盖到声源特征长度,该时间段内的声压信号不能准确反映整船的辐射噪声特征。28~36 s、35~43 s和39~47 s 3个时间段的噪声频率分布存在差异,如仅取其中的一段,因采样时段较短,将漏掉有的频率上的噪声级高峰,不利于掌握该船的实际辐射噪声状态。将这3个采样时段对应的观察点空间位置叠加在一起,能覆盖到约0.8倍的船长,用它评定船舶噪声级时,有望给出一个在频谱上能较全面反映整船特征的结果。因此,可用如下两种方法改进采样长度效果:①扩展声压信号的采样时间段长度,对应的空间长度最好能接近声源的特征长度(如取15 s采样长度,对应2/3船长);②在实船测试中选取多个声压均方根值较大的时间段(对应不同的空间方位),将各时间段换算出的声压谱进行能量平均后再换算声源级。
首先尝试第①种方法。将采样的声压信号长度扩大到15 s,采用第2节中的方法计算不同15 s长度时间段内的声压均方根值,以确定具体选取的时间段。根据图8,选取其中声压均方根值较大的3个时间段,分别是25~40 s、31~46 s和37~52 s,换算成声源级,结果如图9所示。可见:3个15 s时间段信号换算出的声源级仍存在一定差异;其中C峰值处“时间段25~40 s”和“时间段37~52 s”对应的声源级差异达7.3~7.9 dB;另一方面,由于截取时间的加长,各段的重合部分也增加,图中3个时间段对应的声源级曲线其吻合度较图7中的为好;“时间段31~46 s”声源级曲线在A、B、C3处都能相对较好地体现峰值特征,这一时间段对应的空间位置靠近船体中部,相对能较好的覆盖到船体的主要声辐射面。图7中的3个时间段对应的声源级曲线,没有一个能较完整的反映A、B、C3处的峰值特征;这是因为对该3处峰值起主要贡献的激励源和辐射面在艇体的不同部位,而8 s时间段对应的观察点空间长度,无法全面有效地覆盖到主要的激励源和辐射面。将采样信号长度增大为15 s后,观察点对应的空间跨度已可有效地覆盖到主要的激励源和辐射面。因此,从反映主要峰值特征而言,截取31~46 s时间段信号换算声源级是较合适的。

图8 两个观察点在不同15 s时间 (a)离船体轴线距离为0.5L的 (b)离船体轴线距离为0.8L的 段内的声压均方根曲线 观察点换算出的声源级 观察点换算出的声源级Fig. 8 Sound pressure rms values of 15 s time 图9 不同15 s时间段换算出的声源级结果 intervals at two observation points Fig. 9 Sound source level transformed from various 15 s time intervals
再尝试第②种方法。28~36 s、35~43 s和39~47 s 3个8 s时间段叠加覆盖的空间位置与31~46 s这一15 s时间段覆盖的空间位置接近。因此,将该3个8 s时间段平均换算出的声源级与31~46 s时间段换算出的声源级进行比对,如图10所示。可见:两组声源级曲线几乎完全重合。从理论基础和时频转化的具体算法而言,扩大时间段换算声源级与多个不同时间段平均换算声源级具有相同的机理,可以说两者是等效的。

(a)观察点离船体轴线距离为0.5L
(b)观察点离船体轴线距离为0.8L图10 3个8 s时间段平均与15 s时间段换算出的声源级结果比对Fig. 10 Sound source levels: three 8 s time intervals averaging vs 15 s time interval
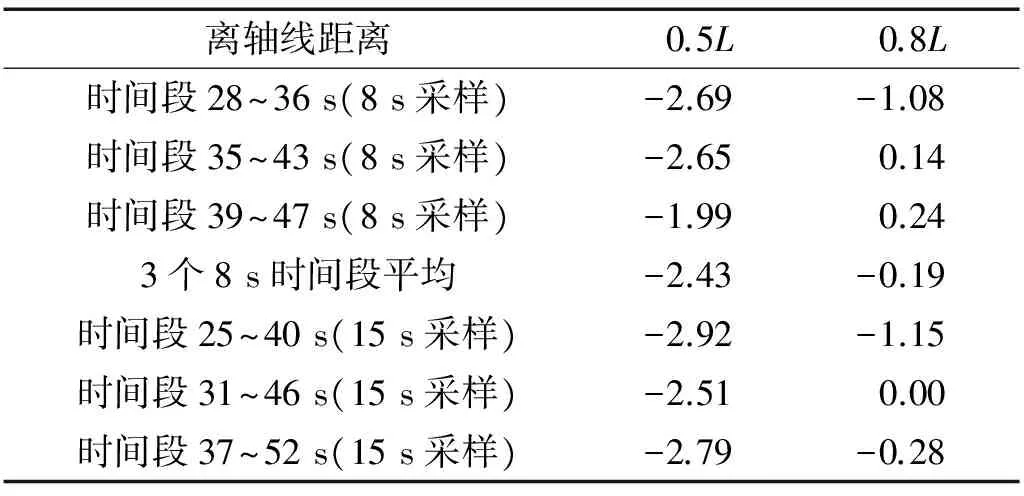
表2 截取不同时间段声压信号计算出的相对总声源级结果
5 结 论
本文基于由一个7个舱室组成的实尺度单层壳船体声弹性计算模型,利用Pekeris水声波导环境中的船舶三维声弹性软件模块,模拟实船测试状态,计算分析了在3个典型机械激励力谱作用下,选取观察点不同采样时段声压信号对船舶声源级评定影响的部分规律,给出如下可为实船噪声级评定测试服务的建议:
浅水环境下,在船体舷侧水平方向单点测试声压,选取其中最强的时间段信号换算声源级,该方法在工程上具有较强的可操作性。但也会带来一些问题,如选取较固定的8 s时间段(观察点相对移动空间位置较固定),其覆盖的范围只有约1/3船长,而船内主要激励源的分布长度或者船体主要声辐射面的长度很可能超过这个距离,给出的噪声级频谱可能会漏掉实际存在的较显著的峰值特征,个别峰值相差能达到8 dB。通过本文研究,建议实船测试时采用声压信号最强的15 s时间段(或者是观察点相对运动长度达到2/3船长左右)来换算声源级,或者是采用多个声压较强的不同8 s时间段(对应观察点相对船体的不同空间部位)平均换算声源级;具体试验时,可以通过左右舷分别测试、多个有效航次平均的方法,提高结果的稳定性。
[ 1 ] 刘兴章. 美国潜艇水声试验场现状及启示[J]. 舰船科学技术, 2011,33(2): 140-143.
LIU Xingzhang. Development prospect and revelation of submarine underwater noise test ground of US navy [J]. Ship Science and Technology, 2011,33(2): 140-143.
[ 2 ] 刘兴章, 陈涛. 挪威海格纳斯潜艇水声试验场测量设施分析[J]. 噪声与振动控制, 2011,31(5): 161-164.
LIU Xingzhang, CHEN Tao. Analysis of facilities of Norwegian acoustic testing field in Heggernes[J]. Noise and Vibration Control, 2011,31(5): 161-164.
[ 3 ] 邹春平,陈端石,华宏星. 船舶水下辐射噪声特性研究[J]. 船舶力学, 2004,8(1): 113-124.
ZOU Chunping, CHEN Duanshi, HUA Hongxing. Study on characteristics of ship underwater radiation noise[J]. Journal of Ship Mechanics, 2004, 8(1): 113-124.
[ 4 ] 祁立波. 桨-轴-艇体耦合振动声辐射的三维声弹性分析方法[D].无锡:中国船舶科学研究中心, 2015.
[ 5 ] LI W L, WU T W, SEYBERT A F. A half-space boundary element method for acoustic problems with a reflecting plane of arbitrary impedance[J]. Journal of Sound and Vibration, 1994,171(2): 173-184.
[ 6 ] 邹元杰, 赵德有. 结构在浅水中的振动和声辐射特性研究[J]. 振动工程学报, 2004,17(3): 269-274.
ZOU Yuanjie, ZHAO Deyou. A vibro-acoustic study on structures in shallow water[J]. Journal of Vibration Engineering, 2004,17(3): 269-274.
[ 7 ] ZOU M S, WU Y S, LIU Y M,et al. A three-dimensional hydroelasticity theory for ship structures in acoustic field of shallow sea[J]. Journal of Hydrodynamics, 2013,25(6): 929-937.
[ 8 ] 邹明松. 船舶三维声弹性理论[D].无锡:中国船舶科学研究中心, 2014.
[ 9 ] 邹明松, 吴有生, 孙建刚, 等. 基于船舶三维声弹性理论的计算技术[J]. 声学技术, 2016,35(6): 112-115.
ZOU Mingsong, WU Yousheng, SUN Jiangang,et al. Computational techniques based on the three-dimensional sono-elasticity of ships[J]. Technical Acoustic, 2016,35(6): 112-115.
