基于DE优化系统辨识的风力机叶片自校正PID振动控制
2018-03-28李迺璐
李迺璐, 徐 燕, 徐 庆, 葛 强
(扬州大学 水利与能源动力学院,江苏 扬州 225127)
智能风力机叶片是指在风力机叶片尾端带有智能驱动器的叶片,其是现代风力机叶片发展的主要方向之一,设计优良的智能叶片对降低叶片相关部件的振动疲劳损耗、提高风能利用率、降低风力发电成本有着重要意义[1]。风力机智能叶片的控制驱动力可以通过一定控制算法改变,从而有效抑制叶片颤振[2]。实际复杂运行环境下叶片系统的参数会受到多种不确定因素影响而发生突变,因此复杂运行环境下的智能叶片高效振动控制策略研究[3]具有非常重要的意义。
文献[4]对比采用不同的控制算法降低弹性叶片的疲劳负载,具体采用干扰利用控制(Disturbance Utilization Control,DUC)来实现柔性、大型风力机叶片的变桨主动控制。文献[5]用独立模态空间控制,通过控制叶片振动的某些模态来控制谐振,并进行了验证。然而以上方法都需要精确的数学模型来实现控制,而实际系统很难建立精确的数学模型。特别在复杂运行环境下,系统的数学模型参数受到不确定因素的影响还会发生不确定变化,因此设计以上控制器将更加困难。
而自校正控制技术[6]针对参数变化的系统具有独特的控制优点,如需要调整的参数少、能够根据对象特性的变化在线修改这些参数等,其应用范围相当广泛。李天利等[7]将自校正PID(Proportional Integral Derivative)控制应用到两轮自平衡小车的平衡控制中,使小车系统具有较好的快速性和稳定性。孟祥懿等[8]将自校正PID控制与Dahlin算法结合实现变风量空调系统的末端控制,取得了良好的控制效果。庄勇博[9]将柔性神经网络与自校正PID控制相结合,提出基于柔性神经网络的电机转速自校正PID控制方案,表明了在该控制下永磁同步电机具有较强的自适应能力。
采用自校正PID对复杂运行环境下的风力机叶片进行振动控制的关键,在于设计性能优良的参数估计器来充分发挥智能叶片振动控制减振[10-11]的效果,传统的参数估计器,仅依靠现有的经验知识选择和调试估计器参数 ,很难设计出针对当前时变参数辨识效果最优的估计器,因此难以达到最优控制效果。对此,本文重点研究差分进化算法相关理论,将差分进化算法应用于叶片系统的递推最小二乘辨识优化中,并设计相应的最优自校正PID控制器,最终实现复杂运行环境下风力机叶片的自校正PID振动控制优化,将优化前后的结果进行对比。
1 智能风力机叶片颤振系统建模
风力机叶片振动模型主要分为经典颤振模型和失速颤振模型,本文中主要采用二自由度的风力机叶片经典颤振模型,包括叶片的挥舞振动和扭转振动,实际风力机叶片的经典颤振也是以挥舞和扭转耦合的振动为主,故该模型为叶片控制研究的最基本、最常用模型。
1.1 风力机叶片经典颤振模型
图1所示为智能叶片截面的二自由经典颤振模型[12-13],智能驱动器为叶片尾端的尾缘襟翼,控制驱动量为尾缘襟翼角β。h和θ分别表示叶片截面的挥舞位移和扭转角,该模型的气动弹性动力学方程为
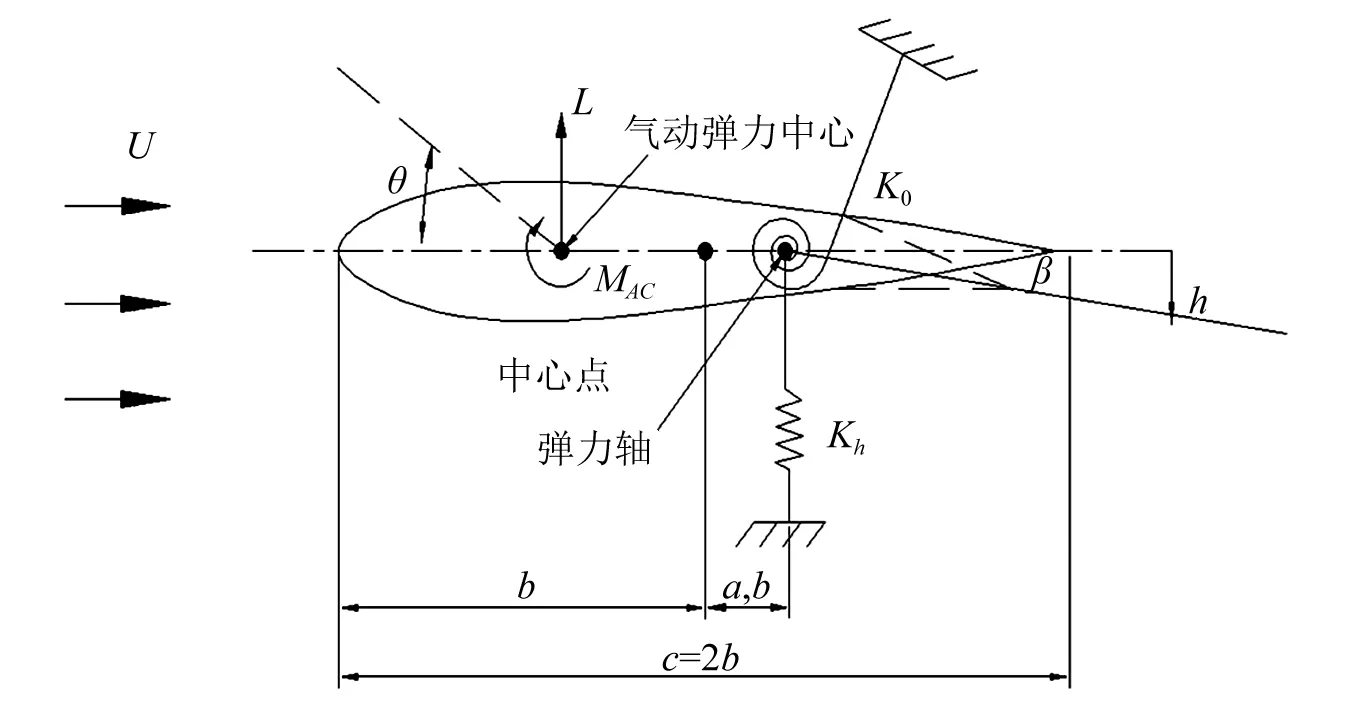
图1 智能风力机叶片截面的经典颤振模型Fig.1 Classic flutter model of smart blade section
(1)
式中:Iθ为弹性轴的转动惯量;m为叶片截面的质量;b为半弦长;xθ为质心和弹性轴之间的无量纲距离;ch和cθ为挥舞位移和扭转角的结构阻尼系数;kh和kθ分别为挥舞位移和扭转角的结构刚度;L和M为叶片截面的气动升力和力矩,可表示为
(2)
根据式(1)和式(2),叶片截面的气动弹性系统可以表示为
(3)

(4)
式中:
1.2 仿真叶片翼型选取
文中仿真叶片翼型为NACA0012,此翼型参数见表1。
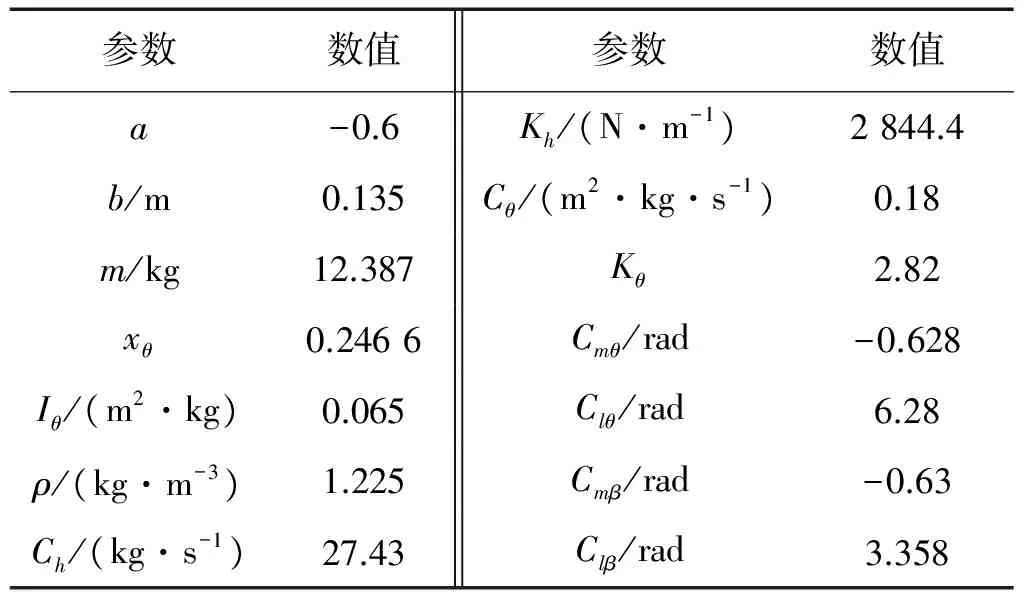
表1 智能叶片翼型的参数数值表
2 差分进化算法优化的自校正PID控制
2.1 智能风力机叶片的优化自校正PID振动控制
风力机叶片模型一方面存在时变性、外部干扰等不确定因素,另一方面间接自校正控制不依赖于控制对象模型,它根据系统在线的输入和输出信息辨识出当前时刻的系统参数,自校正控制思想使得控制针对系统的变化具有自适应性。基于此,将基于遗忘因子的递推最小二乘算法的系统辨识能力与PID控制的良好稳定性相结合来控制智能风力机叶片振动。
设计一个单输入单输出自校正增量PID控制器,将误差e(k)及其增量作为输入为
Δu(k)=kp(e(k)-e(k-1))+kie(k)+kd(e(k)-2e(k-1)+e(k-2))
(5)
式中:kpkikd为可以根据自校正调整的PID参数。
设
(6)
则式(5)可改写为
Δu(k)=g0e(k)+g1e(k-1)+g2e(k-2)
(7)
式中:g0g1g2为关于kpkikd的可调参数,可根据差分进化优化的系统辨识进行自校正设计,控制原理图见图2。
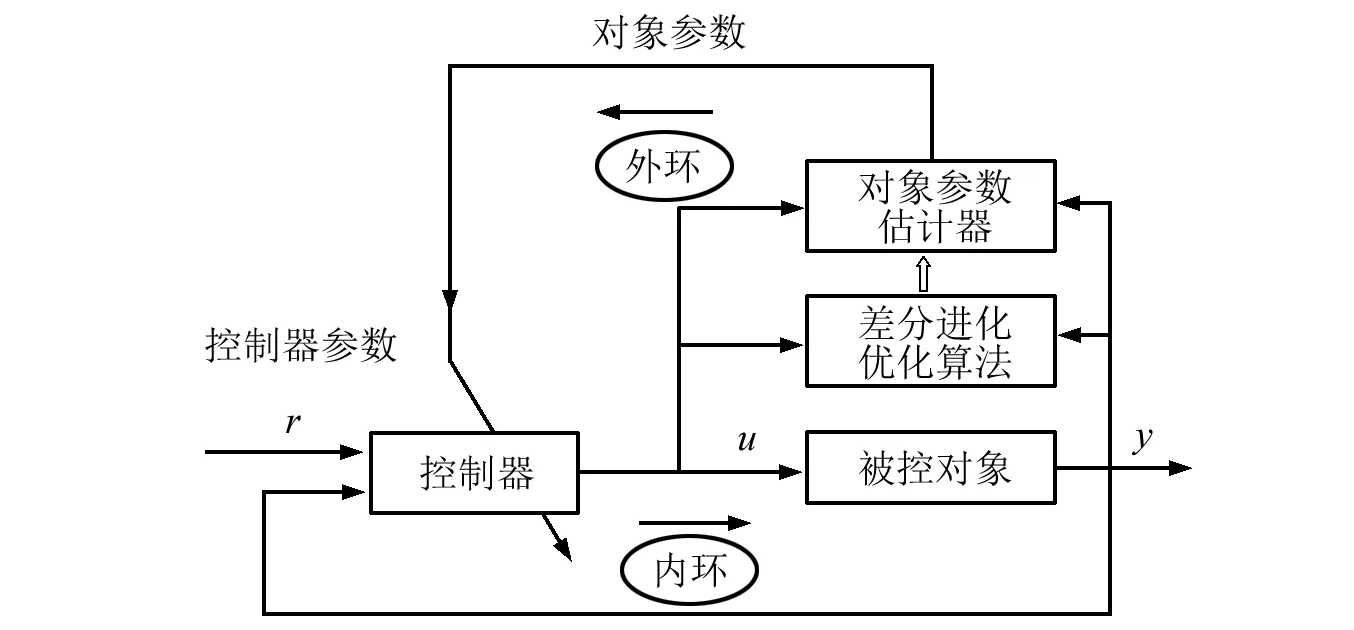
图2 差分进化优化的自校正PID原理Fig. 2 DE optimized self-tuning PID control scheme
2.2 智能风力机叶片间接自校正PID控制器设计
2.2.1 递推最小二乘参数估计器设计
将系统对象设为受控自回归CAR模型模型
A(z-1)y(k)=B(z-1)u(k-d)+ξ(k)
(8)
式中:u(k)和y(k)分别为输入和输出序列,即为叶片气动弹性系统模型的输入和输出;ξ(k)为白噪声,结构参数na,nb和d已知。并且
(9)
式中:a1,a2,…,ana;b0,b1,b2,…,bnb为待估计的系统参数,可根据输入输出序列辨识得到。
在一般自校正控制问题中,考虑参数时变性,本文采用时变加权系数即带遗忘因子的递推最小二乘法[14],对数据施加一个时变加权系数λ。λ=1等同于不存在遗忘因子的普通递推最小二乘法,λ=0时该算法可以快速地跟踪非平稳信号的局部趋势。一般情况下,遗忘因子λ在期望的稳定状态下是可以逐渐增加的直至一个合适的值,以减小参数估计带来的误差。其性能指标为
(10)

(11)
利用上述的递推最小二乘法和矩阵求逆引理可得
(12)
2.2.2 间接自校正PID控制器设计
间接自校正PID控制器的设计思想是在对系统模型参数进行估计以后用极点配置控制来正确选择PID控制参数从而对模型进行控制。结合极点配置控制和传统PID控制,极点配置PID控制器可以表示为
F1(z-1)u(k)=R(z-1)yr(k)-G(z-1)y(k)
(13)
式中:yr(k)为期望输出;F(z-1)、R(z-1)、G(z-1)是待定多项式,涉及到的PID控制参数(g0,g1,g2)。将式(13),式(12) 代入式(8) 得到闭环系统输出为
(14)
(15)
风力机叶片控制系统的Simulink仿真模型见图3。
2.3 基于差分进化算法的辨识优化
差分进化算法是基于群体智能理论的优化算法,它保留了基于种群的全局搜索策略,采用实数编码、基于差分的简单编译操作和一对一的竞争生存策略,降低了遗传操作的复杂性,同时它特有的记忆能力使其可以动态跟踪当前的搜索情况,从而调整搜索策略,具有较强的全局收敛能力和鲁棒性。差分算法根据父代个体间的差分向量进行变异、交叉和选择操作,通过不断的迭代计算,保留优良个体,淘汰劣势个体,引导搜索过程向最优解逼近。在递推最小二乘的辨识算法中,遗忘因子是影响辨识效果的重要参数,仅依靠试凑法或经验值法判断遗忘因子,不能达到更好的自校正PID控制效果。因此,采用差分进化算法对间接自校正PID控制过程中的系统辨识进行优化,从而达到优化控制器[16]参数的目的。
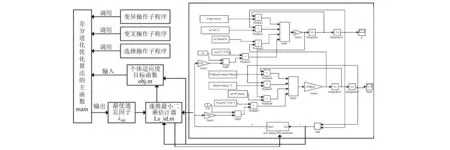
图3 风力机叶片的Simulink仿真模型Fig. 3 Simulink model of wind turbine blade
2.3.1 参数设置方案
本文设置的差分进化算法的参数包括变异因子、交叉因子、群体规模和最大迭代次数。变异因子F是控制种群多样性和收敛性的重要参数,F值太小会使得群体差异都较差,不易跳出局部极值;交叉因子CR可控制个体参数的交叉参与程度,以及全局搜索和局部搜索能力的平横,CR过大会导致收敛变慢;群体规模和最大迭代次数应在种群多样性和计算时间之间平衡选取。因此,本文中仿真所采用的参数设置方案为:F=0.95,CR=0.6,群体规模size=80,最大迭代次数G=200,采用实数编码,遗忘因子λ的搜索范围为[0,1]。
2.3.2 初始种群的选取
在空间里随机产生满足约束条件的80个体,实施措施如下
λ(i)=rand(size,1)(λmax-λmin)+λmin
(16)
式中:λmax和λmin分别为λ的上界和下界;rand(size,1)是随机小数。
2.3.3 适应度目标函数选取
选基于遗忘因子的辨识误差为差分进化的适应度目标函数,表达式为
(17)
式中:λ为遗忘因子即待优化参数;L为测试数据的数量;y(k)为模型的第k个测试样本的输出;φ(k)为测试数据向量。个体的适应度直接取为对应的目标函数值,适应度值越小越好。
λ的选取决定了递推最小二乘法对风力机叶片模型参数估计的准确性,从而影响间接自校正PID控制的最终控制效果。取最小适应度(即最小目标函数值)对应的λ值作为差分进化优化的结果,用于优化的自校正PID控制器参数设计中。差分进化优化算法流程图见图4。
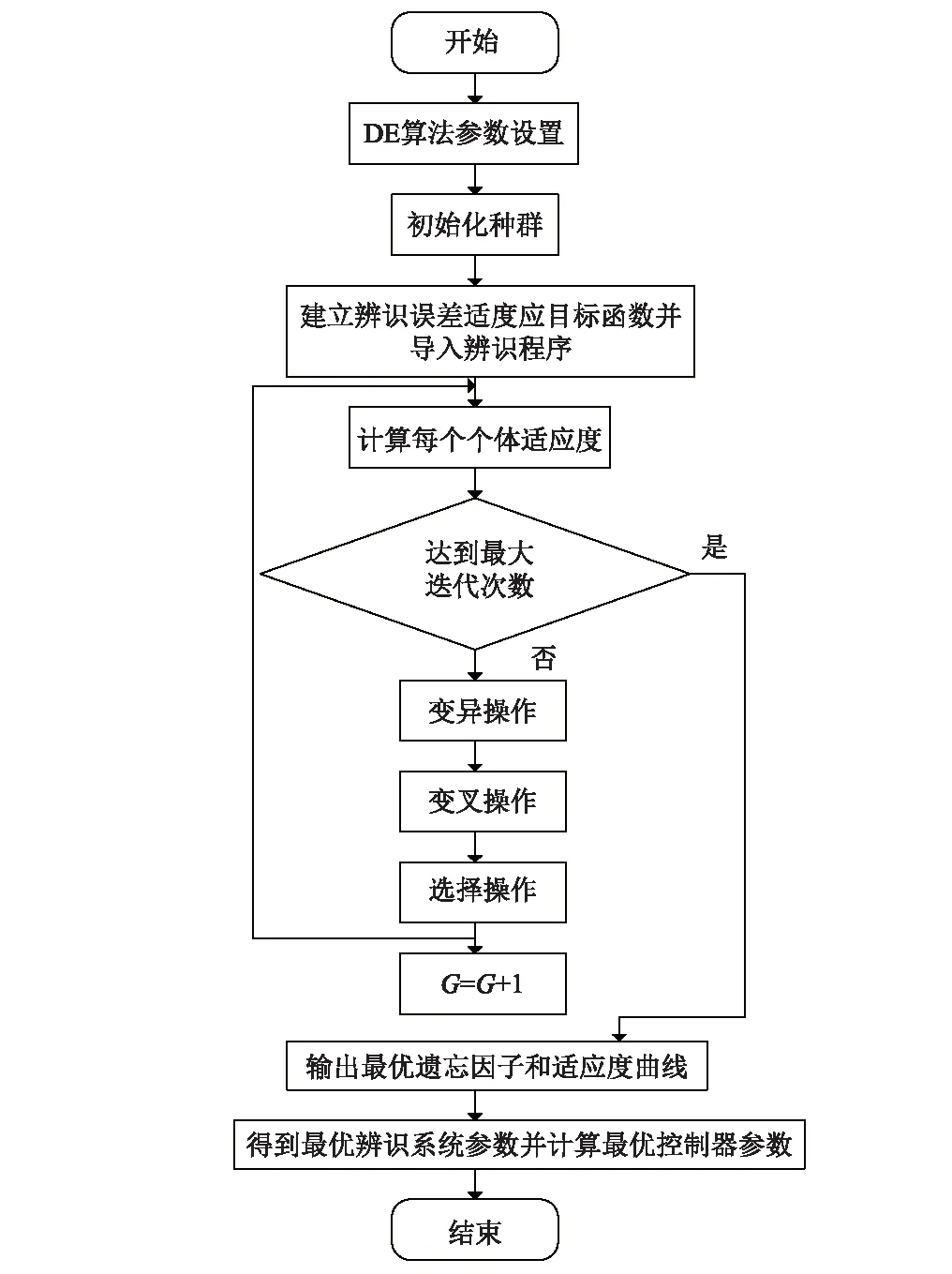
图4 差分进化优化算法的流程图Fig. 4 Diagram of differential evolution optimization algorithm
2.3.4 变异操作
从群体的80个个体中随机选择3个个体xp1,xp2和xp3,且i≠p1≠p2≠p3∈[1,80],则基本的变异操作为
hi(t+1)=λp1(t)+F(λp2(t)-λp3(t))
(18)
如果无局部优化问题,变异操作可写为
hi(t+1)=λb(t)+F(λp2(t)-λp3(t))
(19)
式中:λb(t)为当前代种群中最好的个体;λp2(t)-λp3(t)为差异化向量,此差分操作是差分进化算法的关键;p1,p2,p3为随机整体,表示个体在种群中的序号。由于上式借鉴了当前种群中最好的个体信息,可加快收敛速度。
2.3.5 交叉操作
交叉操作是为了增加种群的多样性,具体操作为
(20)
式中:randli为[0,1]这间的随机小数;CR为交叉操作,CR=0.6。
2.3.6 选择操作
为了确定λi(t)是否成为下一代的成员,实验向量vi(t+1)和目标向量λi(t)对目标函数J进行比较
(21)
反复执行变异操作至选择操作,直至达到最大迭代次数G。
运行差分进化算法主程序,经过200次迭代操作后,得到最优遗忘因子λ=0.908,适应度变化曲线见图5。
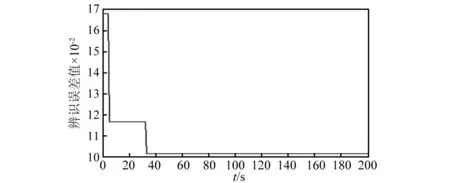
图5 辨识误差函数J的优化过程Fig.5 The optimization process of the identification error function J
将最优遗忘因子λ代入递推最小二乘算法中进行系统参数估计,得到的最佳系统参数辨识结果见图6。文中系统受不确定因素影响在仿真时间为59 s时系统传递函数参数[a1,a2,a3,a4,b1,b2,b3,b4]突变为[-3.3, 4.5,-2.9,0.8,-0.001 7,-0.018,-0.01,0.004] , 图6中可以发现当系统参数发生突变时,差分进化优化的辨识算法可以很快跟踪辨识系统参数变化,得到较为精确的最优辨识结果为[-3.316, 4.506,-2.91,0.76,-0.001 68,-0.018 2,-0.011,0.004 2]。
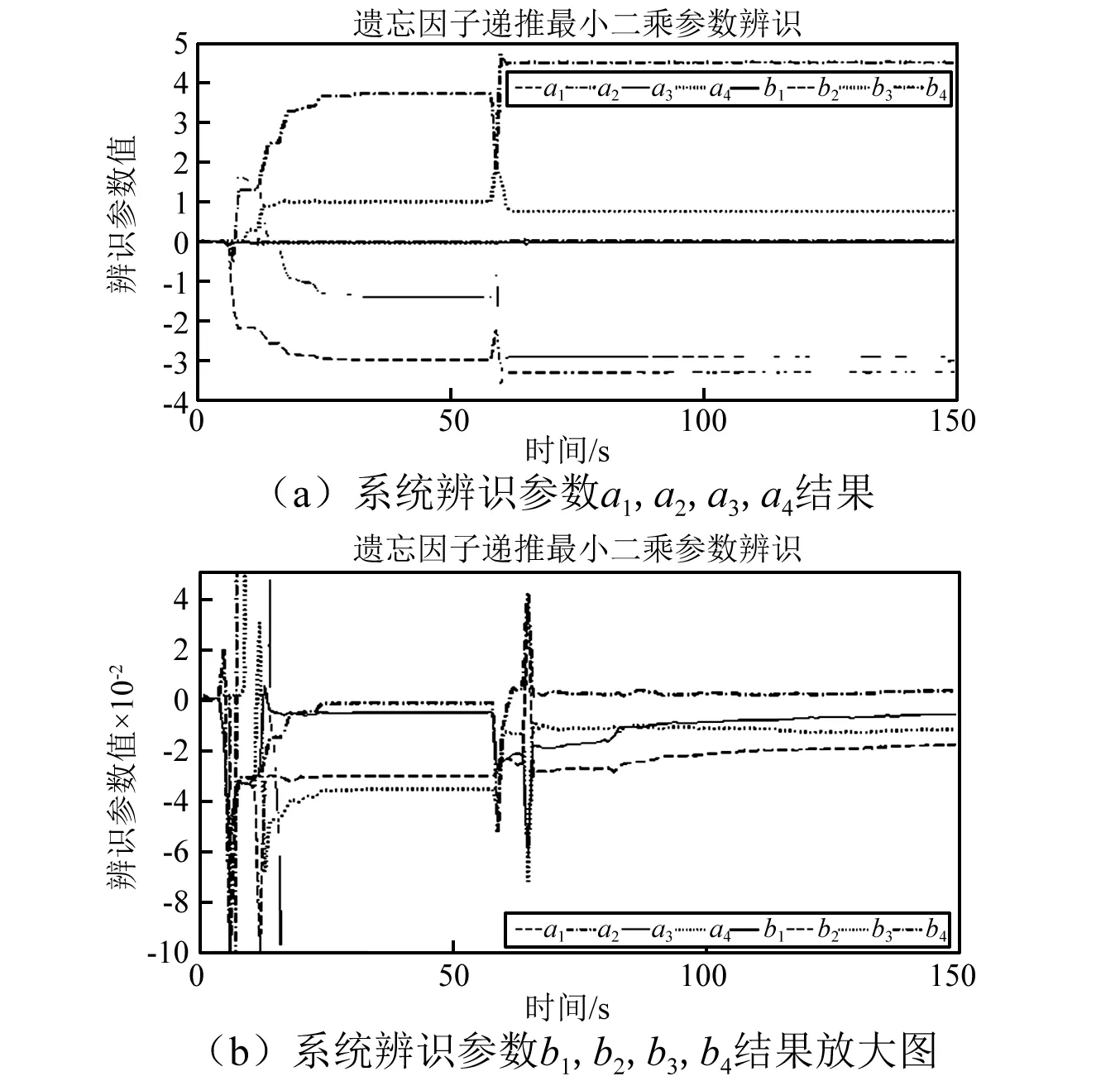
图6 差分进化优化的递推最小二乘参数辨识结果Fig. 6 Parameter identification results of the recursive least square using differential evolution optimization
3 差分进化优化辨识的风力机叶片自校正PID控制仿真研究
仿真实验中,控制系统模型在MATLAB/Simulink环境中建立完成,考虑叶片尾缘襟翼的饱和角度在[-30°~30°],系统输出为挥舞位移与扭转角之和,系统期望闭环传递函数分母多项式为
Am(z-1)=1-1.320 5z-1+0.496 6z-2
根据图6中的最优系统辨识结果和间接自校正PID控制器设计规则,可以得到最优控制器参数为F=[ 1.000 1.295 0.469 -0.103],G=[ -87.213
241.020 1-270.024 144.607 -31.453],R=-3.063。
为比较差分进化算法优化的有效性,优化前后的叶片挥舞位移曲线、扭转角曲线、尾缘襟翼角曲线见图7。
通过优化前后仿真结果对比图可以发现,简单PID控制由于未考虑参数辨识,当系统参数发生突变时控制器不能够完全抑制叶片振动;未优化的自校正PID控制能够在一段时间内有效抑制振动,但是控制结果存在稳态误差且超调量较大;而优化后的自校正PID控制器设计建立在差分进化最优辨识结果的基础上,大大改善了控制动态特性,增强了系统的稳定性和鲁棒性。
为了进一步对比控制策略性能,将三种控制策略下的叶片挥舞位移、扭转角、尾缘襟翼角的峰值以及挥舞位移均方根值见表2,可见优化后的结果数值都明显减小,证明优化控制效果是有效的。
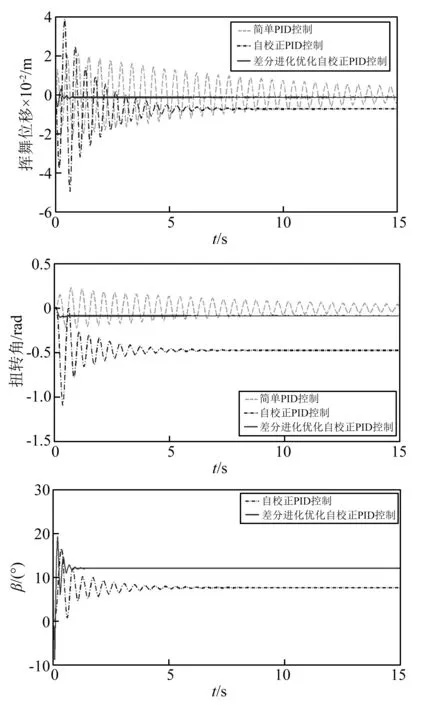
图7 优化前后风力机叶片挥舞位移,扭转角和尾缘襟翼角的控制对比图Fig.7 Closed-loop responses of the blade vibration system via self-tuning PID controller
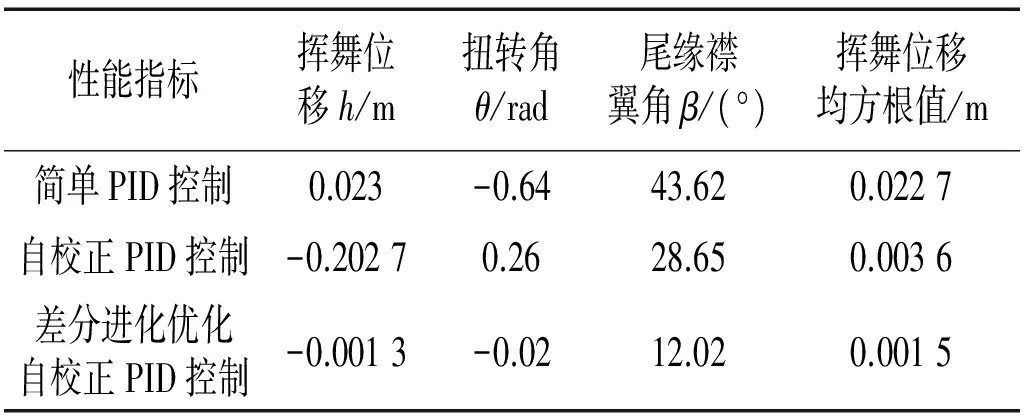
性能指标挥舞位移h/m扭转角θ/rad尾缘襟翼角β/(°)挥舞位移均方根值/m简单PID控制0.023-0.6443.620.0227自校正PID控制-0.20270.2628.650.0036差分进化优化自校正PID控制-0.0013-0.0212.020.0015
4 结 论
将差分进化算法理论、递推最小二乘算法以及间接自校正PID控制相结合,对风力机叶片振动控制进行优化,取得良好控制效果。结论如下:
(1) 复杂运行环境下,当风力机叶片系统参数发生突变时,传统简单PID控制不能满足智能叶片振动控制需求,基于系统辨识的自校正PID控制可以适应系统模型的变化,达到控制目标,提高系统的鲁棒性。
(2) 差分进化算法可以很好的优化系统辨识过程,提高辨识精度,优化自校正PID控制器,使得挥舞位移、扭转角和尾缘襟翼角在短时间内均明显减小,说明采用差分进化算法对系统递推最小二乘辨识优化及自校正PID控制器优化是有效的。
[ 1 ] 胡燕平, 戴巨川, 刘德顺. 大型风力机叶片研究现状与发展趋势[J]. 机械工程学报, 2013, 49(20): 140-151.
HU Yanping, DAI Juchuan, LIU Deshun. Research status and development trend on large scale wind turbine blades[J]. Journal of Mechanical Engineering,2013, 49(20): 140-151.
[ 2 ] HANSEN M H. Aeroelastic instability problems for wind turbines [J].Wind Energy, 2007, 10(6): 551-557.
[ 3 ] BARLAS T K, VAN KUIK G A M. Review of state of the art in smart rotor control research for wind turbines [J]. Progress in Aerospace Sciences, 2010, 46(1): 1-27.
[ 4 ] PARKER G A. Optunal utilization of disturbances for improved fatigue-mitigation and speed-regulation in flexible wind turbines[D]. Alabama: University of Alabama at Tuscaloosa, 2010.
[ 5 ] SVENDSEN M N, HRENK S, HEGSBERG J. Resonant vibration control of rotating beams[J]. Journal of Sound and Vibration, 2011, 330(9): 1877-1890.
[ 6 ] 王浩宇, 张云生,张果.系统辨识及自适应控制系统算法仿真实现[J]. 控制工程, 2008,15(增刊2): 77-80.
WANG Haoyu, ZHANG Yunsheng, ZHANG Guo. Implementation on system identification and adaptive system simulation algorithm[J]. Control Engineering of China, 2008,15(Sup 2): 77-80.
[ 7 ] 李天利,周东辉,陈远思,等. 基于自校正PID控制的两轮自平衡小车[J].《自动化应用》, 2015(2): 71-72.
LI Tianli, ZHOU Donghui, CHEN Yuansi, et al. Self tuning PID control of two wheeled self-balancing vehicle[J]. Automatic Application, 2015(2): 71-72.
[ 8 ] 孟祥懿,付东翔,王亚刚. 基于Dahlin算法的变风量空调自校正PID控制[J].石油化工自动化, 2013, 49(6): 25-28.
MENG Xiangyi, FU Dongxiang, WANG Yagang. Introduction of self-tuning PID control based on dahlin algorithm in VAV air conditioner[J]. Automation in Petro-Chemical Industry, 2013, 49(6): 25-28.
[ 9 ] 庄勇博. 永磁同步电机的柔性神经网络自校正PID控制方案[J].伺服控制, 2012(7): 40-43.
ZHUANG Yongbo. Flexible neural network self-tuning PID control scheme for permanent magnet synchronous motor [J]. Servo Control, 2012(7): 40-43.
[10] 李迺璐, BALAS M J. 基于抗干扰自适应算法的颤振系统的研究与仿真[J]. 测控技术, 2014, 33(9):125-127.
LI Nailu, BALAS M J. Research and simulation of vibration control system based on adaptive disturbance rejecting control algorithm[J]. Measurement & Control Technology, 2014, 33(9):125-127.
[11] 李传峰, 徐宇, 赵晓路. 风力机翼型尾缘襟翼动态特性分析[J]. 工程热物理学报, 2014,35(5): 883-887.
LI Chuanfeng, XU Yu, ZHAO Xiaolu. Analysis on dynamic performance of trailing edge flap on wind turbine airfoil[J]. Journal of Engineering Thermophysics, 2014,35(5): 883-887.
[12] KALLESOE B S.A low-order model for analysing effects of blade fatigue load control[J]. Wind Energy, 2006, 9(5): 421-436.
[13] 李迺璐, 穆安乐, BALAS M J. 基于B-L气动模型的旋转水平风机叶片经典颤振稳定性分析[J]. 振动与冲击, 2015,34(23):171-176.
LI Nailu, MU Anle, BALAS M J.. Classical flutter stability analysis of rotating horizontal fan blade based on B-L aerodynamic model [J]. Journal of Vibration and Shock, 2015, 34(23): 171-176.
[14] 丁健, 杨慧中. 基于遗忘因子最小二乘的自适应学习控制[J]. 控制工程, 2013, 20(6):1010-1013.
DING Jian, YANG Huizhong. Adaptive learning control based on least squares algorithm with a forgetting factor[J]. Control Engineering of China, 2013, 20(6):1010-1013.
[15] 乐茂华. 关于Diophantine方程的一类求解问题[J]. 长江大学学报(自然科学版), 2005, 2(7):185-186.
LE Maohua. A class of solution problem of Diophantine equation [J]. Journal of Yangtze University (Natural Science), 2005, 2(7): 185-186.
[16] 陈春强, 陈前. 电流变夹层振动控制和拓扑优化研究[J]. 振动与冲击, 2016, 35(21):137-142.
CHEN Chunqiang, CHEN Qian. Vibration control and topology optimization of er sandwich [J]. Journal of Vibration and Shock, 2016, 35 (21): 137-142.
