自走式西瓜盆栽土壤信息采集装置设计与试验
2018-03-28刘浩蓬卫佳刘金吴太晖宫雪徐胜勇
刘浩蓬,卫佳,刘金,吴太晖,宫雪,徐胜勇
(华中农业大学工学院,农业部长江中下游农业装备重点实验室,湖北 武汉 430070)
近年来,我国农作物的生产水平有了突飞猛进的发展[1]。作物育种和作物生长过程的管理水平也相应地不断提高。在反季节蔬果种植中通常采用的是温室栽培技术,为了提高作物的质量和产量,需要对温室栽培作物的生长信息进行全程化检测和管理。在温室西瓜培育过程中需要对样本植株个体的生理指标以及生长环境相关参数进行精准采集[2-3]。通常情况下存在样本数量大,数据采集的周期长、频次高等问题[4-6]。传统的人工操作方式容易出错,劳动强度大,已经无法满足当前作业要求。因此,亟需一种取代人工采样的机械化、自动化和信息化等程度高的信息采集装置,以降低人工劳动强度和生产成本,提高西瓜育种的产量、质量和效益。
现有国内的作物信息采集装置大多只能获取温室内的环境信息,根据环境信息变化和作物生长阶段所需进行灌溉[7],而土壤属性包含的含水率和土壤养分等快速测量与控制对作物的生长和产量预测等具有重要意义,实现对土壤属性的精确检测需要对检测人员进行专业的培训,无法实现在线检测[8];而对于大面积的农田土壤墒情信息的采集,可以采用GPS定位并结合GSM短信信息传输数据,实现对大面积农田的区域性信息测量,由于此类装置体积较大,采用固定点采集,多点布置装置整体成本较高,维护困难,不适合在温室盆栽培育中推广使用[9-12];设计一种能精准定位盆栽并将土壤信息监测传感器伸入土壤中监测土壤信息的装置是解决温室盆栽土壤信息快速监测的有效途径。因此,本文设计一种盆栽土壤信息采集装置(以下简称采集装置),首先设计采集装置的整机结构,其次设计多关节机械臂、传感器检测装置等关键部件,同时构建该装置的控制系统和通信系统,最后进行盆栽土壤湿度采集试验,分析采集装置定位误差及产生原因。该装置采用基于STM32微控制器的多关节机械臂,模拟人工检测方式将传感器伸入西瓜盆栽土壤中,将传感器搭载于电动自走式移动平台上,移动平台在电机驱动下能沿铺设的轨道运动到指定盆栽位置,根据超声波传感器检测盆栽位置,实现对盆栽土壤湿度数据的采集。测得数据可通过SIM900A GPRS模块上传到云服务器端,实现网页端或移动终端对采集数据的实时监控。
1 整机结构与工作原理
1.1 整机结构
采集装置为电动自走式作业机械,装置的整体结构如图1所示,主要由履带底盘、多关节机械臂、传感器检测装置、电气控制盒、霍尔传感器、超声波测距模块和减速电机等组成[13-16]。
动力装置采用固定在履带底盘两侧后下方的两个直流减速电机,电机与履带驱动轮采用联轴器连接;4个霍尔传感器安装在履带底盘车头正下方,并保持在一条直线上,与履带底盘车头平齐;多关节机械臂的旋转台固定在履带底盘上表面,由舵机控制旋转台在水平面旋转,角度范围为270°;超声波测距模块固定在履带底盘的两侧,与旋转台平面中心线平齐;多关节机械臂由4节机械臂组成,机械臂之间采用舵机连接,构成6自由度多关节机械臂;传感器检测装置由夹持装置、舵机、舵臂、限位开关和传感器组成,夹持装置与多关节机械臂的末端固连在一起,舵机固定在夹持装置外侧中间,夹持装置中心线位置设计了一个固定滑槽,舵臂安装在舵机和固定滑槽之间,限位开关和传感器连接在一起;传感器安装在夹持装置中。装置的主要技术参数见表1。

图1 采集装置结构示意图Fig. 1 Structure diagram of acquisition device
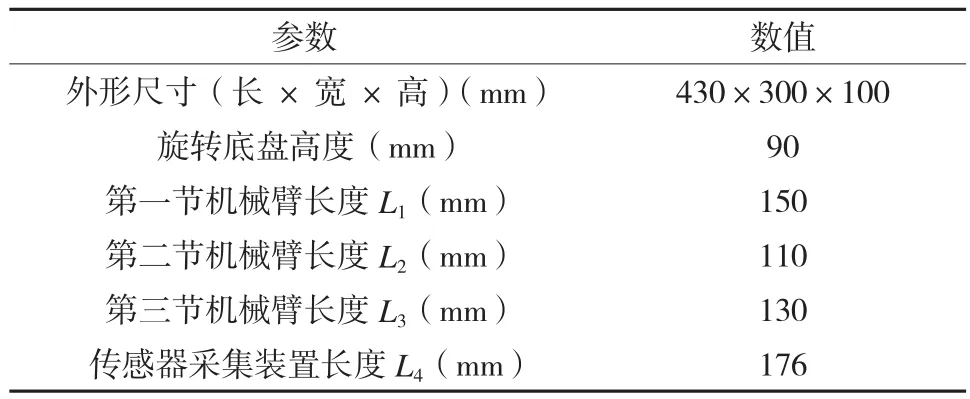
表1 采集装置主要技术参数Table 1 Main technical parameters of acquisition device
1.2 工作原理
采集装置的工作环境是外形呈长方形的温室西瓜大棚,每条垄由7×2个盆栽组成,盆栽之间的间距为40 mm,轨道宽度为80 mm,盆栽中种植西瓜植株,瓜蔓引向上方。采集装置在温室中的运行轨道铺设见图2。
采集装置在进行采集时,装置沿轨道向前行驶,通过安装在车头的4个霍尔传感器判断前进路线,同时检测制动标志线;当检测到制动标志线时,装置停止。车身两侧的超声波测距模块分别检测车身到盆栽的精确距离,STM32单片机控制多关节机械臂将传感器检测装置定位到盆栽土壤表面,夹持装置上的舵机通过舵臂带动传感器竖直插入盆栽的土壤中,等待数据稳定后,STM32单片机读取传感器数据并保存到SD卡中,同时通过SIM900A GPRS模块将实时数据传输到云服务器。多关节机械臂根据制动标志线依次采集车身左右盆栽的土壤信息,完成土壤信息采集后,采集装置启动并沿着轨道继续行驶,重复上述过程,直到采集完所有盆栽。

图2 采集装置运行轨迹示意图Fig. 2 Schematic diagram of moving trajectory of acquisition device
2 采集装置控制和通信系统设计
2.1 采集装置的控制系统设计
如图3所示,采集装置控制系统包括STM32控制器、土壤湿度传感器、霍尔传感器、超声波测距模块、SD卡存储单元、SIM900A GPRS模块、驱动电路、直流减速电机、多关节机械臂、传感器夹持装置和电源电路,完成装置的运动控制、数据采集、数据存储和无线传输[17-19]。
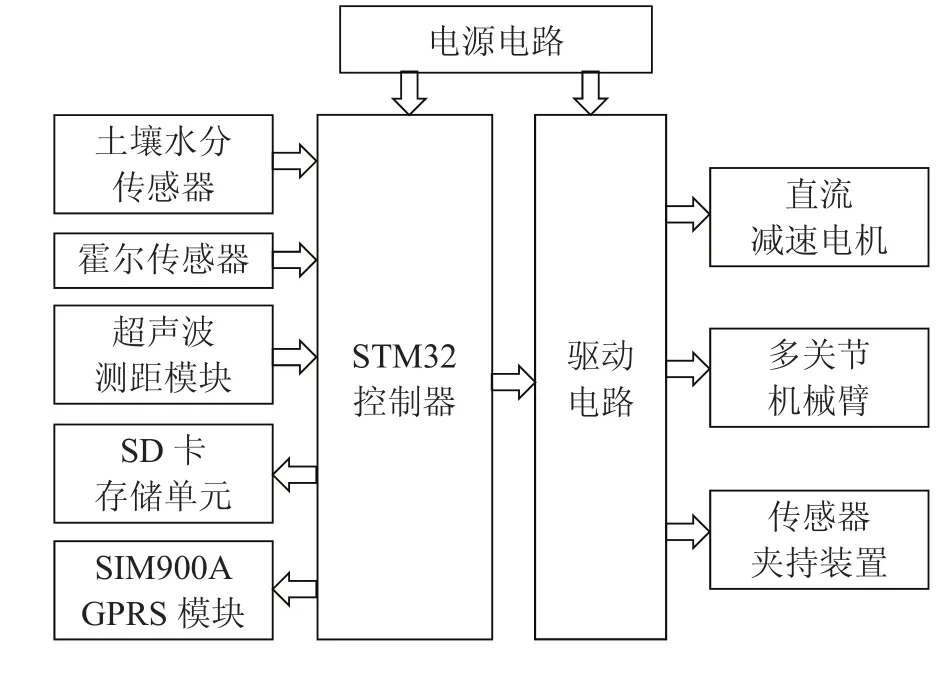
图3 采集装置控制系统框图Fig. 3 Block diagram of acquisition device control system
2.2 采集装置的通信系统设计与实现
为实现盆栽土壤信息的远程监控,通过SIM900A GPRS模块实现无线网络与 Internet 的连接,将数据上传到云服务器端,并存储在云数据库中,再通过监控平台实时显示。
2.2.1 通信单元设计 SIM900A GPRS模块是一款高性能工业级GSM/GPRS模块,内嵌TCP/IP协议,能够在EGSM/ 900 MHz频段下工作,发射功率为2 W,-40~85 ℃的温度环境下可正常运行[20-21]。采用联通SIM卡与SIM900A GPRS模块相结合,以STM32驱动SIM900A GPRS模块,通过TCP/IP协议与Internet连接,将装置采集的土壤湿度信息以GPRS流量的形式发送至云服务器。
2.2.2 网页端监控系统设计 监控系统由云服务器、云数据库和基于网页的监控平台组成。租用阿里云云服务器和云数据库,采用Java语言建立基于Linux平台的端口监听程序,能够实时获取SIM900A GPRS模块传输的数据,并将数据写入云数据库。进一步设计出基于网页的监控平台,为了提高监控系统的响应速度与交互性,采用了基于异步Java Script和Ajax技术的Web数据交互方式。进一步开发出基于安卓系统的手机客户端。用户通过该监控系统实时获取西瓜盆栽的土壤信息,并保存数据,便于后期对数据进行分析处理。
3 关键部件设计与计算
3.1 传感器检测装置设计与计算
如图1和图4所示,传感器检测装置采用曲柄滑块机构,活动铰链m0为舵机,连杆La为舵臂,传感器固定在连杆Lb上,c为传感器检测装置的固定滑槽,并且与多关节机械臂的末端相连,舵机m0转动时带动舵臂La绕铰链旋转,带动传感器沿固定滑槽c上下运动。限位开关安装在传感器检测装置的末端,用来检测传感器是否成功定位到盆栽土壤表面。

图4 检测装置机构运动简图Fig. 4 Kinematic diagram of detecting device
对传感器检测装置进行受力分析可知,传感器插入土壤过程中受到垂直向上的阻力Fb和连杆La沿垂直方向的分力Fay,当传感器运动到下极限位置(La与水平夹角为45°)时,舵机需要提供的扭矩达到最大,设为Ta[22]。扭矩Ta计算方法为:

采用SMTS-II-100型号土壤湿度传感器(精度为3%)对西瓜盆栽土壤(培养基质)湿度进行采集,将传感器固定在万能材料试验机上,在不同湿度条件下,测试不同传感器插入深度对应的土壤阻力,具体测试数据见图5。随着传感器插入深度的增加,土壤阻力逐渐增大,传感器插入深度和土壤阻力呈正相关关系。在传感器插入土壤的最大深度为100 mm的情况下,对盆栽中不同位置测试10次取平均值,3种湿度下最大阻力为4.6 N,通过计算可知,需要舵机提供的最大力矩为46 N·cm。考虑检测装置壳体间相对滑动受到的摩擦阻力等因素,综合分析检测装置的性能和成本,采用型号PDI-4409MG、额定力矩为98 N·cm的舵机,作为检测装置的动力元件。

图5 土壤阻力与作业深度的关系Fig. 5 Relationship between soil resistance and job depth
3.2 多关节机械臂的机构设计与运动学分析
机械臂机构简图如图6所示,该机构由一个270°旋转底盘和4个舵机连接的多关节机械臂组成。移动平台底盘加旋转底盘的高度为L0,三节机械臂长分别为L1、L2和L3,传感器检测装置长度L4;各个部分与x轴正方向夹角分别为θ1、θ2、θ3和θ4,盆高度为H,两臂之间用舵机连接,通过控制各个舵机转动角度使机械臂搭载传感器运动到指定位置。为使传感器能精准插入土壤,第四节机械臂应当在工作时与地面垂直,即θ4为90°。
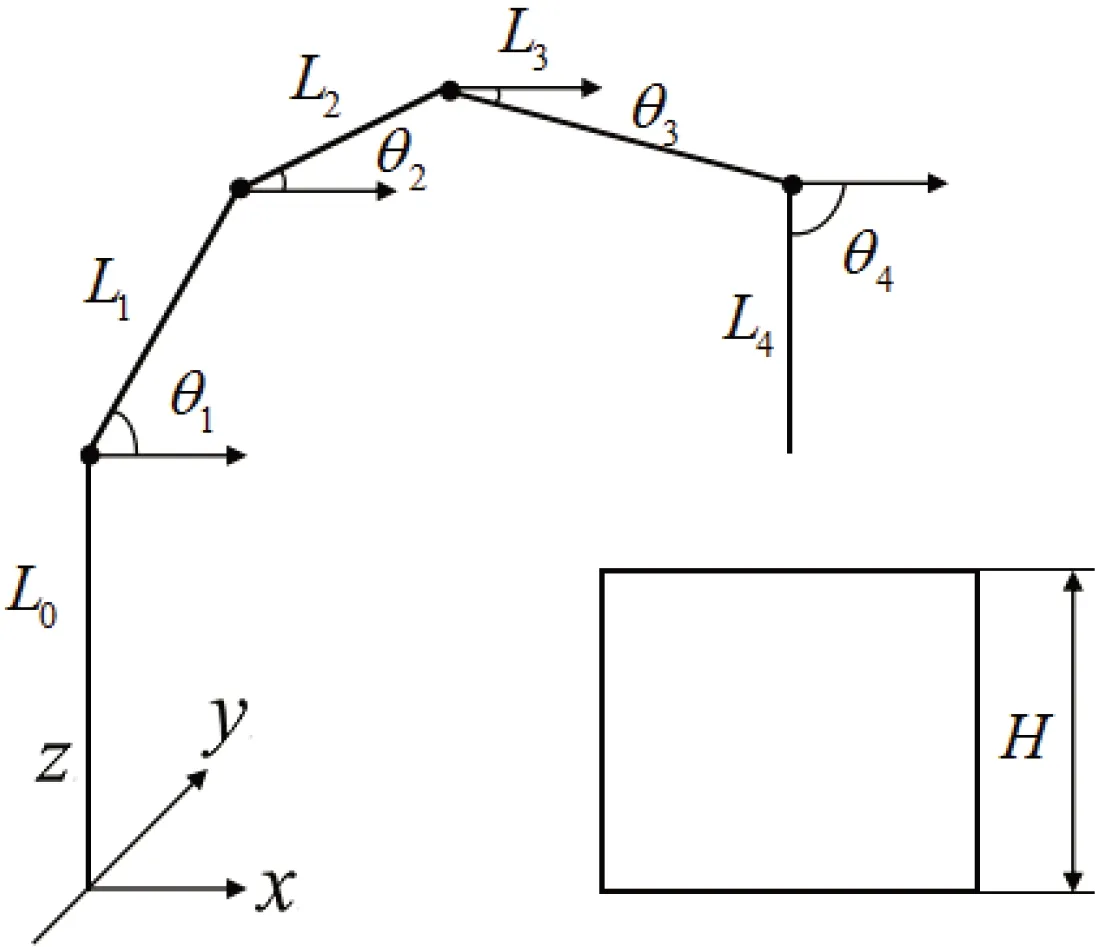
图6 机械臂机构简图Fig. 6 Diagram of mechanical arm
经过推导,得出机械臂运动过程中每个舵机的转角表达式为:

式中:k为第一个舵机转动角度与机械臂目标距离的比例系数,Lx为盆栽和旋转底盘中心的距离,Lmin为机械臂最短伸长距离。
3.3 机械臂工作幅宽和采集装置定位误差分析
3.3.1 机械臂工作幅宽 由于盆栽土壤信息采集装置的车体宽度为300 mm,为避免机械臂运动过程中碰到车身,选择合理的机械臂工作近端极限距离为La=170 mm。在机械臂工作时,传感器检测装置应当与地面保持垂直,当三节机械臂在一条直线上,并且传感器检测装置末端刚好定位到盆栽土壤上方时,机械臂达到远端极限位置,此时满足:

式中:Lmax为机械臂最长伸长距离,H为盆的高度,取H=200 mm,由公式(3)~公式(8)可计算得Lmax≈ 342 mm。因此,可以确定采集装置的机械臂工作幅宽为170~342 mm。
3.3.2 采集装置定位误差分析 根据实际土壤湿度采集作业方式,将传感器检测位置设定在距离盆栽边缘50 mm处。采集装置根据超声波模块对盆栽进行定位,只能定位到盆的边沿,因此传感器插入盆栽位置的理论值应该比盆栽到旋转底盘中心的距离Lx增加50 mm。在机械臂工作幅宽范围内设置采集装置与盆栽等间隔距离的10组试验,测量采集装置实际插入盆栽位置,每组进行10次测试,取平均值并保留到整数位,得出采集装置插入盆栽位置的理论值与实际值结果见表2。

表2 机械臂定位误差实验结果Table 2 Experimental results of mechanical arm’s positioning error
由表2可知,采集装置定位理论值和实际值之间误差的平均值为7.2 mm,最大误差为11 mm。测量定位范围距盆栽边沿50 mm内均可满足测量要求,由此可知采集装置的最大定位误差为11 mm,在测量允许范围内,能够完成预期功能。分析结果表明,采集装置定位误差主要由超声波测量误差和机械臂运动产生的误差组成,可以通过换用精度更高的测距装置(如激光测距仪)来减小误差。
4 盆栽土壤湿度采集试验
进行盆栽土壤湿度采集试验的目的主要是检验装置是否能够顺利完成西瓜盆栽土壤信息采集工作,以及装置各个部件的功能是否符合设计要求,并对装置的可靠性进行评估。试验装置见图7。
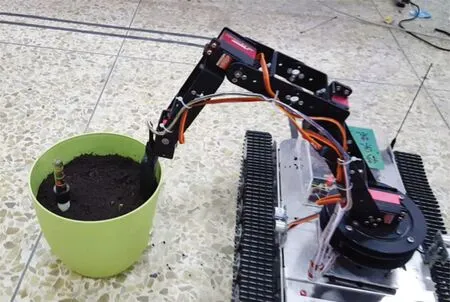
图7 采集装置试验图Fig. 7 Diagram of acquisition device testing
4.1 试验条件与方法
2016年12月在湖北省武汉市华中农业大学机电工程训练中心室内对120株西瓜盆栽进行土壤湿度采集试验。试验中采用SMTS-II-100型号土壤湿度传感器采集土壤湿度信息。采集装置的运行轨迹见图2,装置行走轨道宽度800 mm,盆栽间隔200 mm,盆的形状为高度200 mm、直径300 mm的圆柱体。
试验过程为:启动采集装置对120株盆栽按预定轨道进行循环轮检,重复10次实验,记录完成检测所需时间,装置脱轨次数、盆栽漏检次数、测量行驶速度等,并对结果求平均值。再从120株盆栽中选取前20株,使用人工方式进行土壤湿度采集,并与装置采集的数据进行对比。
试验的评价指标有:装置采集土壤湿度信息的准确度、检测过程中的漏检率、装置行走的正确率、装置的工作效率[23]。其中,漏检率为未检测到的盆栽占总盆栽数的百分比。
4.2 试验结果与分析
在满足测试需求情况下,装置最大行走速度设置为0.24 m/s,行走的正确率为100%,达到自动化设计需求。在盆栽样本采集实验中,平均工作效率为3.2 盆/min,漏检率为0.92%。对于实验中出现的漏检问题,主要有两个原因,一是装置在行走过程中速度过快或传感器剧烈震动,会影响超声波传感器测量的数据,导致误判;二是由于盆钵表面曲率较大会降低传感器检测精度。针对装置漏检问题,可通过增加超声波传感器数量、换用受震动影响小的激光测距装置和增加盆钵侧面平面度来提高传感器检测准确度,从而避免漏检。若要提高采集速率,可以采取以下两种方法,一是改进装置整机结构,采用轮式的运动方式替代履带式,从而提高运动速度;二是在设计成本允许的情况下采用效率更高的机械臂。
在人工采集时,为了保持数据的一致性,将传感器与盆栽边缘的水平距离调整为50 mm。人工采集与装置采集结果对比。通过分析可知对于同一盆植株,装置自动采集与人工采集的结果误差不超过3.1%(图8),即该装置测量的数据与人工测量的数据重合度很高。该误差的产生主要是受传感器自身精度的影响。因此,替代人工采集而采用自动采集方式对盆栽土壤信息进行检测能够满足采集要求。
5 结论
针对现有温室西瓜盆栽土壤信息采集过程中存在的自动化程度低、人工采集工作强度大等问题,设计了一种电动自走式温室盆栽土壤信息采集装置,并通过实验验证了该装置稳定性较高。建立了多关节机械臂的运动学模型,实现对盆栽的准确定位,其采集装置定位误差的最大值为11 mm;针对采集装置定位误差问题,可通过进一步提高机械臂的加工精度来减小误差。设计巧妙的传感器检测装置,使传感器能根据不同采集对象灵活更换;针对装置漏检问题,可通过改用受振动影响小的激光测距装置,或增加盆钵侧面平面度来提高超声波传感器检测的准确度。
采集装置可通过作业需求更换除湿度以外的其他合适传感器,并采用循环轮检方式能很好地检测出西瓜盆栽土壤内部信息。电动自走式温室盆栽土壤信息采集装置在作业时稳定可靠,降低了劳动强度,节省了人力成本,相比人工采集而言提高了盆栽信息采集的效率,为设施农业盆栽环境信息监测、营养监控和补给控制的研究提供了借鉴意义。

图8 西瓜盆栽土壤人工采集与装置采集结果对比Fig. 8 Comparison of artificial and device acquisition
参考文献:
[1] 黎志康. 我国水稻分子育种计划的策略[J]. 分子植物育种,2005, 3(5): 603-608.Li Z K, Strategies for molecular rice breeding in China[J].Molecular Plant Breeding, 2005, 3(5): 603-608.
[2] 潘海兵, 万鹏, 黎煊, 等. 基于自动导引小车系统盆栽水稻高通量输送系统的设计[J]. 农业工程学报, 2014, 30(4): 136-143.Pan H B, Wan P, Li X, et al. Design of high throughput conveyor system of potted rice based on automated guided vehicle system[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(4): 136-143.
[3] 杨信廷, 吴滔, 孙传恒, 等. 基于WMSN的作物环境与长势远程监测系统[J]. 农业机械学报, 2013, 44(1): 167-173.Yang X T, Wu T, Sun C H, et al. Remote monitoring system of crop environment and growing based on WMSN[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1):167-173.
[4] 王立舒, 丁晓成, 时启凡. 基于微型自动导引运输车的盆栽作物数据采集系统[J]. 农业工程学报, 2014, 30(16): 17-24.Wang L S, Ding X C, Shi Q F. Data collection system of greenhouse corps based on micro automated guided vehicle[J].Transactions of the Chinese Society of Agricultural Engineering,2014, 30(16): 17-24.
[5] Pasgianos G D, Arvanitis K G, Polycarpou P, et al. A nonlinear feedback technique for greenhouse environmental control[J].Computers & Electronics in Agriculture, 2003, 40(1): 153-177.
[6] Ji M, Xia J. Analysis of vehicle requirements in a general automated guided vehicle system based transportation system[J].Computers & Industrial Engineering, 2010, 59(4): 544-551.
[7] 赵命华, 李康, 丁伟. 一种盆栽管理系统: 201510333236.1[P].2015-08-26.Zhao M H, Li K, Ding W. A potted management system:201510333236.1[P]. 2015-08-26.
[8] 王凤花, 张淑娟. 精细农业田间信息采集关键技术的研究进展[J].农业机械学报, 2008, 39(5): 112-121.Wang F H, Zhang S J. Research progress of the farming information collections key technologies on precision agriculture[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(5): 112-121.
[9] 杨绍辉, 杨卫中, 王一鸣. 土壤墒情信息采集与远程监测系统[J]. 农业机械学报, 2010, 41(9): 173-177.Yang S H, Yang W Z, Wang Y M. Remote collecting and monitoring system of soil moisture content information[J].Transactions of the Chinese Society for Agricultural Machinery,2010, 41(9): 173-177.
[10] 李慧, 刘星桥, 李景, 等. 基于物联网Android平台的水产养殖远程监控系统[J]. 农业工程学报, 2013, 29(13): 175-181.Li H, Liu X Q, Li J, et al. Aquiculture remote monitoring system based on IOT Android platform[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(13): 175-181.
[11] 李辉, 左钦月, 罗科, 等. 跨农业: 研制水稻智能育种机器人的探讨[J]. 中国生物工程杂志, 2014, 34(5): 116-121.Li H, Zuo Q Y, Luo K, et al. Transagriculture: A discussion on developing intelligent rice breeding robot[J]. China Biotechnology,2014, 34(5): 116-121.
[12] 黄文晋, 侯时迪, 赵聪, 等. 基于GSM网络的农田灌溉智能控制系统[J]. 物理通报, 2014(12): 123-124.Huang W J, Hou S D, Zhao C, et al. Intelligent control system of farmland irrigation based on GSM network[J]. Physical Communications, 2014(12): 123-124.
[13] Vivaldini K, Rochal F, MartarelliI N J, et al. Integrated tasks assignment and routing for the estimation of the optimal number of AGVS[J]. International Journal of Advanced Manufacturing Technology, 2016, 82(1-4): 719-736.
[14] 陈致水, 张燕, 梁栋, 等. 振动筛式马铃薯收获机的设计[J].农机化研究, 2012, 34(4): 84-87.Chen Z S, Zhang Y, Liang D, et al. Design of potato harvester in shaker-style[J]. Journal of Agricultural Mechanization Research,2012, 34(4): 84-87.
[15] 陈进, 杨广静, 徐凯, 等. 基于ARM的联合收割机远程监测系统设计[J]. 电子科技, 2016, 29(1): 131-135.Chen J, Yang G J, Xu K, et al. Combine harvester remote monitoring system based on ARM[J]. Electronic Science and Technology, 2016, 29(1): 131-135.
[16] 申屠留芳,张洪宇,杨刚, 等. 温室大棚电动自走式撒肥机的设计[J]. 农机化研究, 2013, 35(9): 145-147, 155.Shen T L F. Zhang H Y, Yang G, et al. Design of greenhouse electric self-propelled fertilizer distributor[J]. Journal of Agricultural Mechanization Research, 2013, 35(9): 145-147, 155.
[17] 王广丰, 赵东标. 基于ARM处理器的嵌入式数控系统[J]. 机械与电子, 2007, 25(2): 26-28.Wang G F, Zhao D B. Embedded CNC system using ARM processor[J]. Machinery and Electronics, 2007, 25(2): 26-28.
[18] 余欢, 刘勇, 郑秀国, 等. 基于STM32的农业环境数据采集终端设计与开发[J]. 上海农业学报, 2016, 32(4): 140-146.Yu H, Liu Y, Zheng X G, et al. Design and development of agricultural environment data collection terminal based on STM32[J]. Acta Agriculturae Shanghai, 2016, 32(4): 140-146.
[19] 钟泽宇. 基于STM32的农田土壤信息采集系统[J]. 农业与技术, 2016, 36(14): 24-24.Zhong Z Y. Study on farmland soil Information collection system based on STM32[J]. Agriculture and Technology, 2016, 36(14):24-24.
[20] 陈进, 季园园, 李耀明. 基于PLC和触摸屏的联合收割机监控系统设计[J]. 仪表技术与传感器, 2014(7): 78-81.Chen J, Ji Y Y, Li Y M. Monitoring system of combine harvester based on PLC and touch-screen[J]. Instrument Technique and Sensor, 2014(7): 78-81.
[21] 翟顺, 王卫红, 张衎, 等. 基于SIM900A的物联网短信报警系统[J]. 现代电子技术, 2012, 35(5): 86-89.Zhai S, Wang W H, Zhang K, et al. IOT SMS alarm system based on SIM900A[J]. Modern Electronics Technique, 2012, 35(5): 86-89.
[22] 刘善林. 曲柄滑块机构中滑块最大速度的位置探讨[J]. 机械,2008, 35(7): 18-19.Liu S L. Research on position of maximum slider velocity in slider-crank mechanism[J]. Machinery, 2008, 35(7): 18-19.
[23] 乔玉蓉, 张星, 程建云. 基于ZigBee的小型温室环境信息控制系统[J].电子科技, 2016(2): 99-101.Qiao Y R, Zhang X, Cheng J Y. Environmental information control system for small greenhouse based on ZigBee[J]. Electronic Science and Technology, 2016(2): 99-101.