基于电机直驱的玉米播种机控制系统的设计
2018-03-28刁培松程卫东
贾 昊,刁培松,程卫东,张 将
(山东理工大学 农业工程与食品科学学院,山东 淄博 255049)
0 引言
从目前已通过省部级鉴定和大量推广应用的播种机看,主要分为气力式和机械式两大类。从结构形式来看,气力式排种器有气吸式、气压式、气吹式及气力与机械组合式达10 余种之多;机械式排种器更是种类繁多,常用的有垂直圆盘侧充式、水平圆盘、倾斜圆盘、窝眼轮式和窝眼刷种轮式等30余种。国外发达国家对精密播种机播种的研究起步比较早,20世纪80年代中期,国外农业研究人员便开始研究电子控制的排种装置,目前国外关于电子控制的排种装置的研究日益成熟,已经开始广泛推广。现阶段国内对于精密播种机的研究与发达国家相比还有一定差距,且大部分研究多集中在故障监测及报警方面,而精密播种机因地轮打滑造成的不均匀播种问题仍未得到解决。虽然已经研发了部分排种控制系统,但其在实用化方面还存在很多问题,特别是基于电机驱动的播种机排种控制和基于计算机系统的排种器性能监测成为提高播种机作业质量的关键,也是今后对播种机研究的主要方向。
目前,国内传动变速结构落后,调节使用不便:一是大多数播种机仍采用铁制刚性地轮驱动,且直径偏小,滑移率高; 二是传动轴支撑多采用普通轴承或滑动轴承,传动不灵活,阻力大; 三是传动变速( 株距调节) 多采用更换链轮方式,变速调节不便。电动执行机构特点:①体积小、动作快反应快、过载能力大、调速范围宽;②低速力矩大, 波动小,运行平稳;③低噪音,高效率;④后端编码器反馈(选配)构成直流伺服等优点;⑤变压范围大,频率可调[1-3]。
1 控制系统总体方案设计
本株距自适应玉米免耕播种机由车载触控、导航移动站、控制盒、终端盒、伺服无极变速器和播种单体构成,如图1所示。
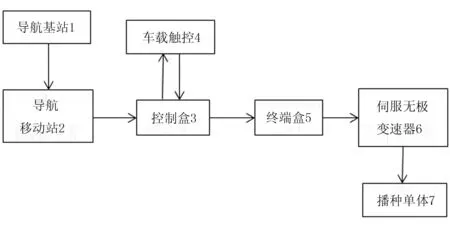
图1 方案设计Fig.1 Scheme and design
工作时,由移动站接受来自基站的报文,并将报文传递到控制盒内的可编程控制器(PLC);PLC将报文中的位置与速度信息读取并存储,通过车载触控输入的数据与控制器不同的算法向终端盒发送指令;同时,PLC将各种信息传回车载触控显示给用户,可编程控制器(PLC)控制伺服无极变速器依据行进速度改变播种单体的播种盘转速,从而达到变量播种的目的。本播种机具有体积小、动作快反应快、过载能力大、调速范围宽、波动小、运行平稳、低噪音,以及高效率等特点。播种机的有益效果是能够通过现有的导航确定播种机的播种速度与位置,实现播种株距自适应的目的,大大提高了农业现代化水平,方案设计如图1所示。
1.1 控制系统方案
控制系统包括车载触控、移动站、控制盒与伺服无极变速系统。
基站发来的报文信息通过移动站接受并发送给控制盒,控制盒内的可编程控制器(PLC)进行读取并存储在响应的寄存器内;车载触控读取对应寄存器内的数据并显示在界面,可编程控制器(PLC)将速度信号进行处理得出电机转速,传递到各个播种单体上的驱动盒进而调节电机转速,实现株距自适应播种。
1.2 主要性能指标和工作参数
控制系统主要性能指标和工作参数,如表1所示。
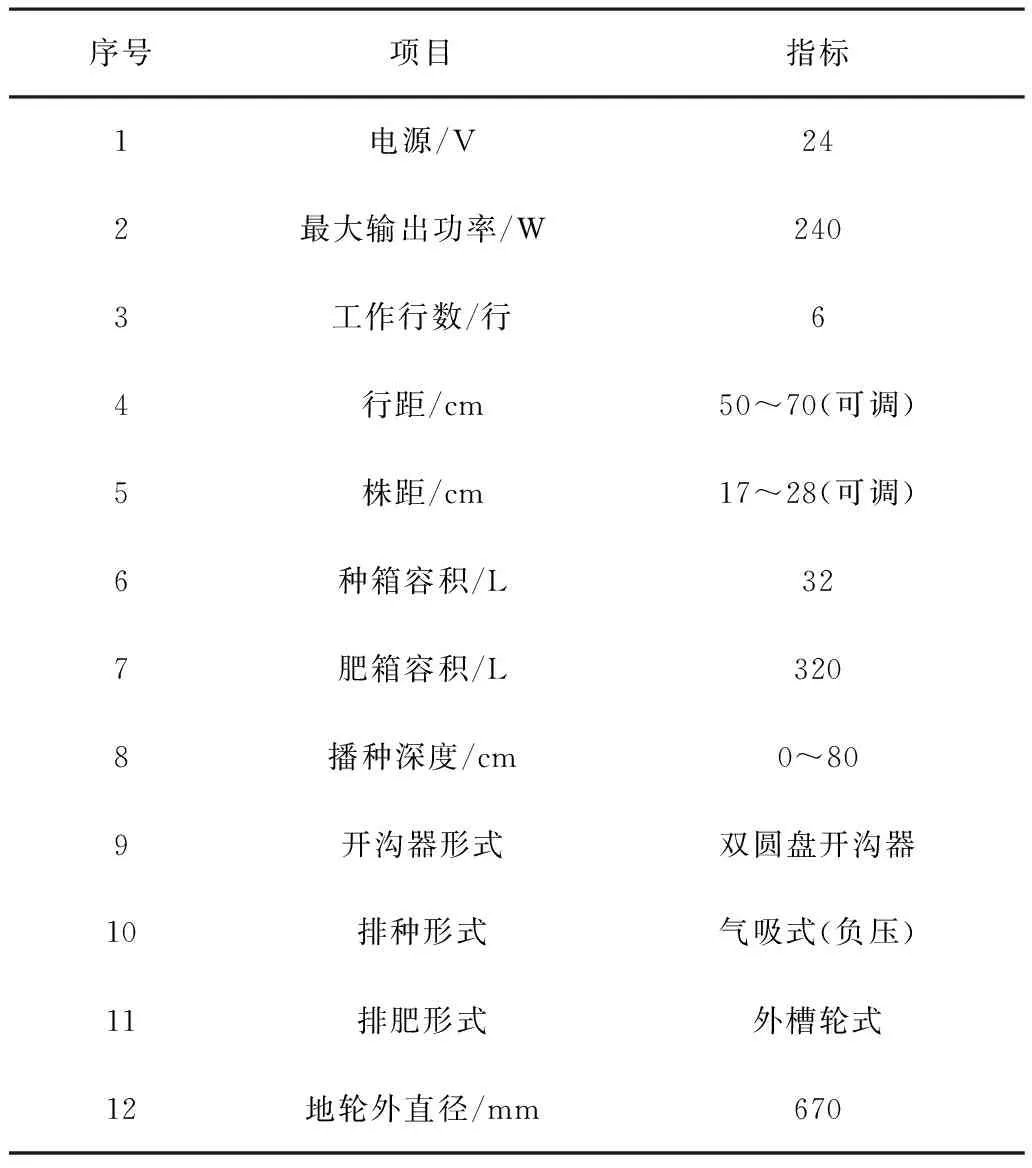
表1 主要性能指标和工作参数Table 1 Main performance and operating parameters
2 基于电机直驱的排种方案设计
对于单个气吸式排种器,由独立的伺服电机驱动,伺服电机转速与拖拉机行驶速度动态匹配,同时根据亩播量,保证播种株距恒定。方案布置图如图2所示。
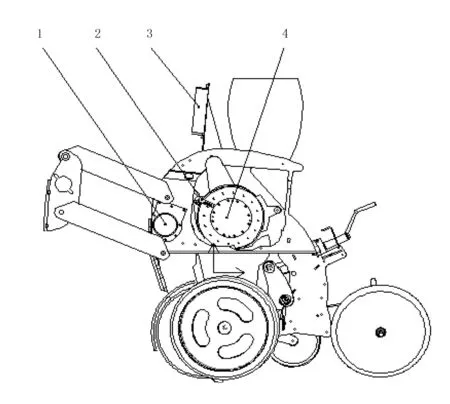
1.伺服电机 2.光电传感器 3.电机驱动器 4.排种盘 图2 玉米播种机单体Fig.2 Units of corn planter
2.1 电机驱动基本原理
该株距自适应系统,采用“北斗+地轮”双通道互补测速系统测速,拖拉机速度信号通过可编程控制器(PLC)转换为伺服电机的脉冲信号,在伺服电机转速与拖拉机行驶速度之间建立一定的关系模型,使伺服电机的转速随着拖拉机速度的变化而变化;伺服电机驱动排种盘,使排种盘转速随拖拉机行驶速度动态变化,从而保证株距不随拖拉机行驶速度的变化而变化,实现株距的动态自适应。
PLC在每行的起点与终点分别读取经纬度信号,并将其存储在响应的寄存器中,进行数据转换并结合作业幅宽计算相应的播种面积。安装在排种盘上的光电传感器,将光电信号转换成电信号通过可编程控制器传递到触控屏,在触控屏上显示相应的信息与报警,实现智能漏播监控报警。
2.2 速度信号的获取
旧驱动方式主要采用地轮驱动,在低速行驶下滑移率较小、可靠度高;在高速作业下滑移率较大,易产生漏播等现象。而通过导航测速可以避免由地轮滑移率较高造成的漏播等现象;因导航精度所限,在低速行驶的情况下,误差略大。
综合两种形式的优缺点,设计了“北斗+地轮”双通道互补测速系统:在低速行驶时采用地轮测速,当作业速度达到一定速度以上时,切换到北斗测速。这样既避免了地轮高速作业的滑移率较大的问题,也改善了低速作业下精度不够的问题。方案如图3所示。
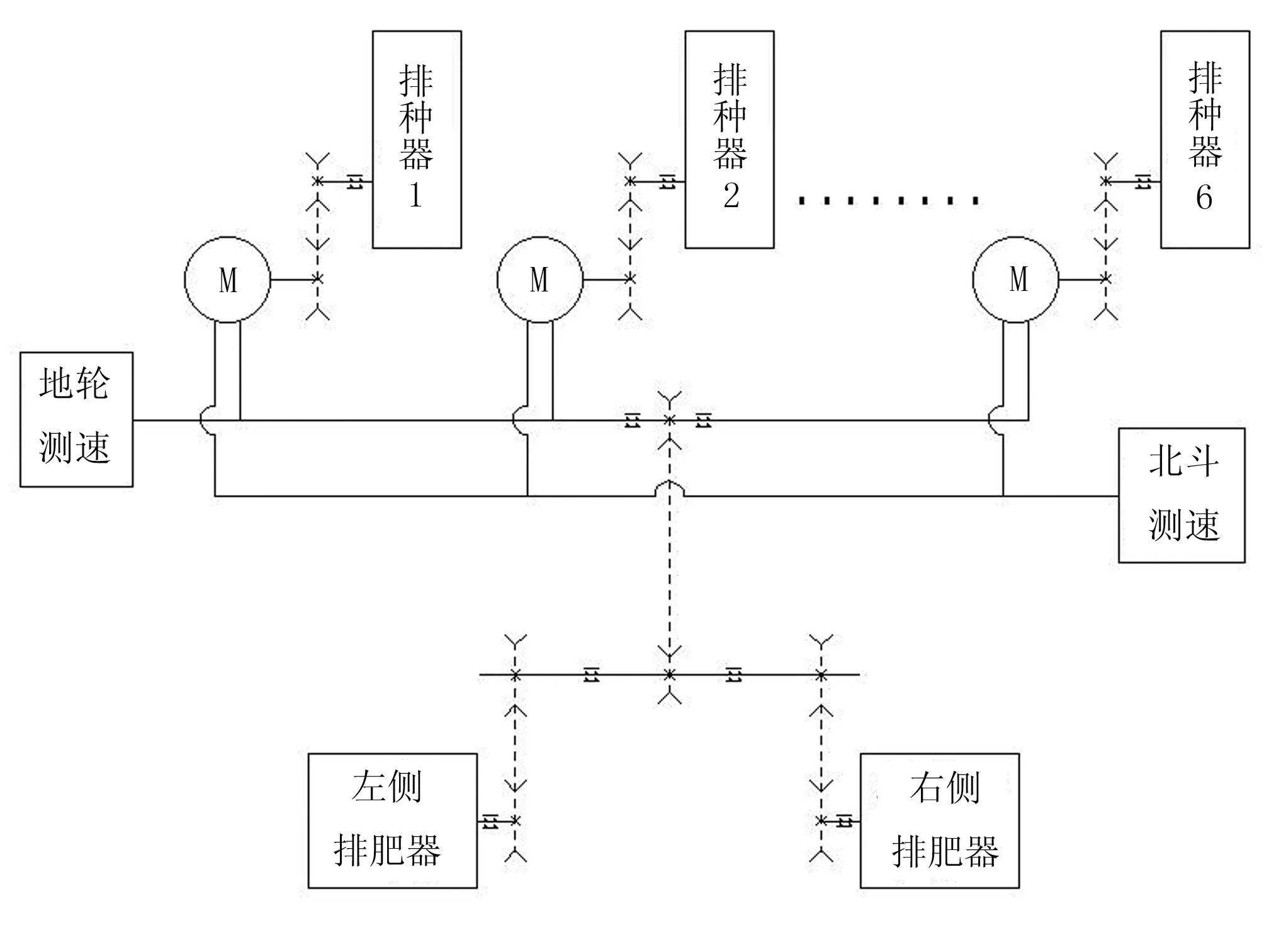
图3 基于电机直驱的排种器驱动方案Fig.3 The seed metering based on driver by servo motor
通过地轮读取速度信息,在地轮的传动轴上装有旋转编码器,作业时地轮着地带动传动轴旋转,旋转编码器读取到传动轴的转速传到控制盒中的可编程控制器(PLC)中。当通过导航系统读取速度信息时,先获取报文信息。报文格式如下:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx
$GPGGA:起始引导符及语句格式说明;
<1> UTC时间,格式为hhmmss.sss;
<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);
<3> 纬度半球,N或S(北纬或南纬);
<4> 经度,格式为dddmm.mmmm(第一位零也将传送);
<5> 经度半球,E或W(东经或西经);
<6> GPS状态,0初始化,1单点定位,2码差分,3无效PPS,4固定解,5浮点解,6正在估算,7人工输入固定值,8模拟模式,9WAAS查分;
<7> 使用卫星数量,从00到12(第一个零也将传送);
<8> 水平精度因子,0.5到99.9;
<9> 天线离海平面的高度,-9999.9到9999.9米,M 指单位米;
<10> 大地水准面高度,-9999.9到9999.9米M 指单位米;
<11> 差分GPS数据期限(RTCM SC-104),最后设立RTCM传送的秒数量,如不是差分定位则为空;
<12> 差分参考基站标号,从0000到1023(首位0也将传送)。地面速度信息。
(GPVTG)$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh
<1> 以真北为参考基准的地面航向(000~359度,前面的0也将被传输);
<2> 以磁北为参考基准的地面航向(000~359度,前面的0也将被传输);
<3> 地面速率(000.0~999.9节,前面的0也将被传输);
<4> 地面速率(0000.0~1851.8公里/小时,前面的0也将被传输);
<5> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效可编程控制器将接受到的报文格式存储到指定的寄存器中,再从特定的寄存器中读取数据。
2.3 株距建模
播种机是由电机带动播种盘转动的,株距跟行进速度应保持一定关系,以达到在速度变化时株距恒定不变。则
(1)
式中D—播种行距(cm);
L—每亩(667m2)宽为D的地块长度。
(2)
式中d—播种株距(cm);
N—每亩(667m2)地的播种株数。
(3)
式中v—拖拉机行进速度(km/h);
n—伺服电机转速。
由上式可知
(4)
经过上述计算可得出在亩株数一定的情况下,行进速度与电机转速对应关系,如表2所示。
控制器将转速信号传递到播种单体电机的控制盒内,以达到播种转速随行进速度变化而变化,从而达到播种株距恒定不变。
2.4 上位机与车载触控
车载触控在前车驾驶室内,通过RS485总线与控制盒相连。触控屏上可以输入播种量、行距与施肥量,从寄存器内读取株距和行进速度等,再在触控屏上显示。触控屏界面设计如图4所示。
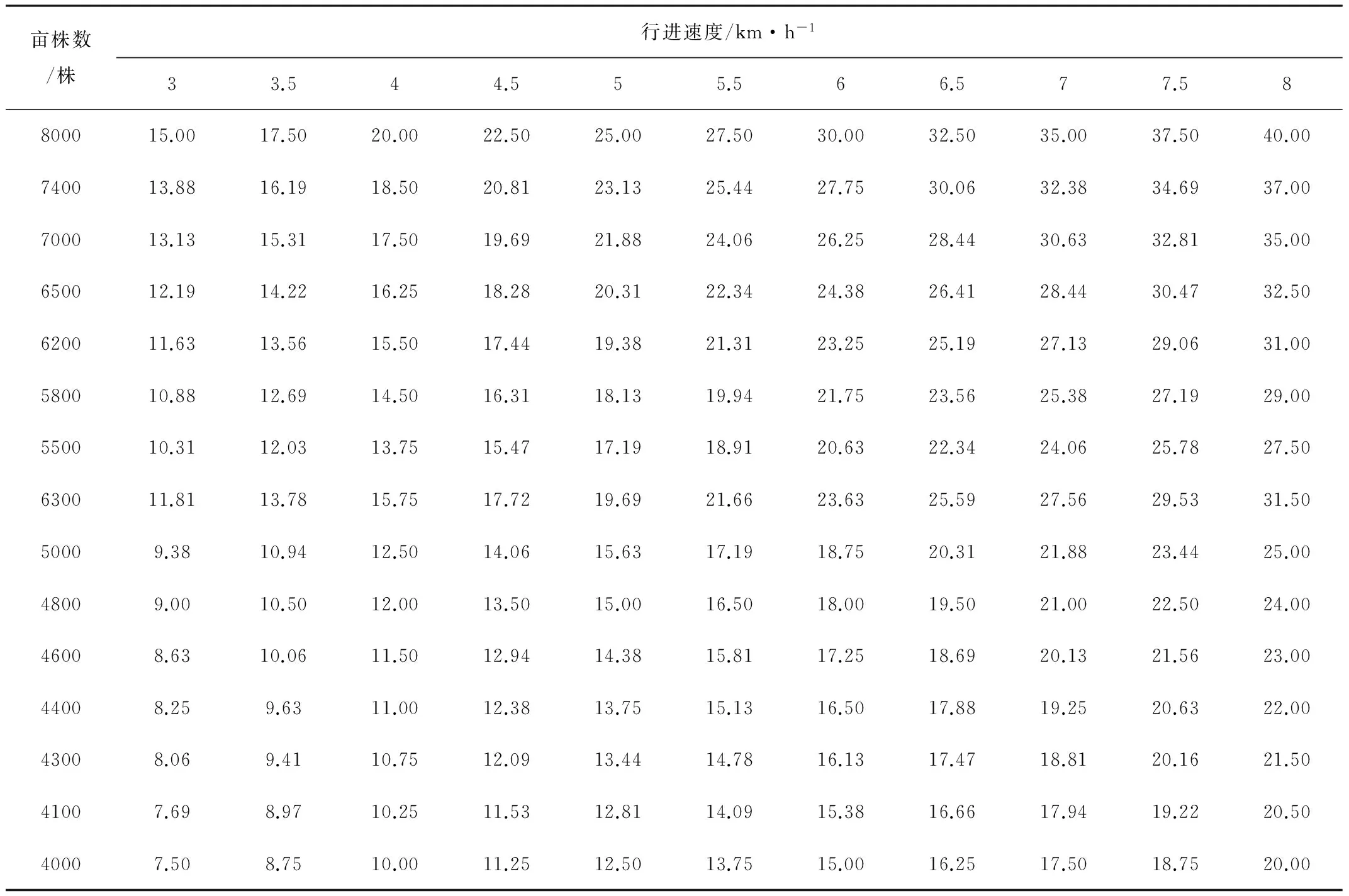
表2 不同行进速度与播量条件下电机对应转速 Tab.2 Motor speed corresponding to different speed and sowing rate r/min
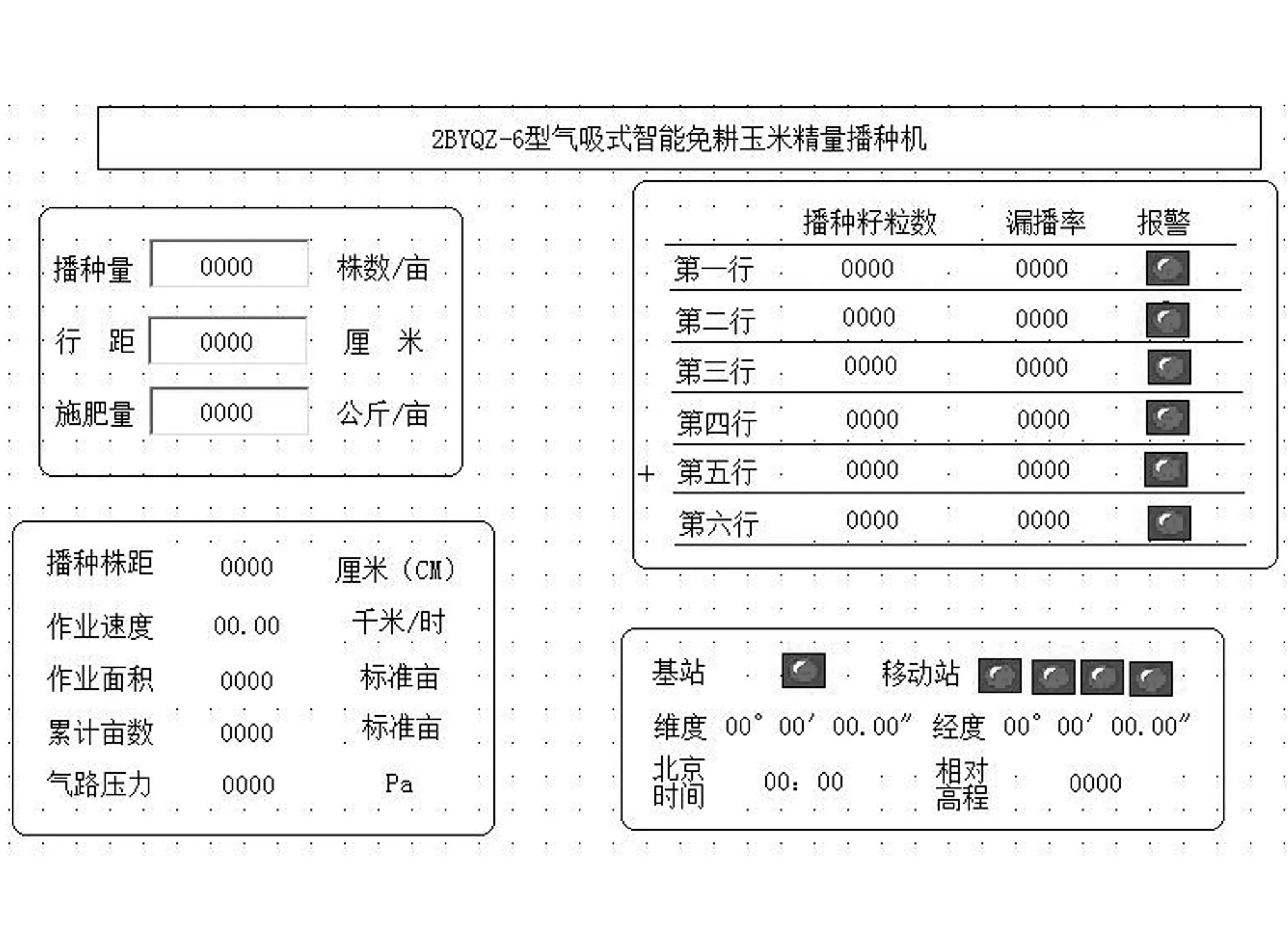
图4 触控屏界面Fig.4 Touch screen interface
3 田间试验
3.1 试验条件
间性能试验分别在淄博临淄凤凰镇富群农机合作社进行,秸秆覆盖量≥40%,秸秆切碎长度合格率≥85%、残茬覆盖量为0.3~0.6kg/m2(秸秆含水率≤25%),配套动力≥89kW。
3.2 试验结果
通过上文的设计方法得出的精密播种机相关参数,按照所得参数对精密播种机进行样机制作,如图5所示。

图5 株距自适应播种机样机Fig.5 Adaptive spacing corn planter prototype
淄博市农业机械科学研究院对该机的粒距合格指数、合格粒距变异系数、漏播率及偏离距离等主要性能指标进行了检测,均优于行业标准指标。试验检测结果如表3所示。
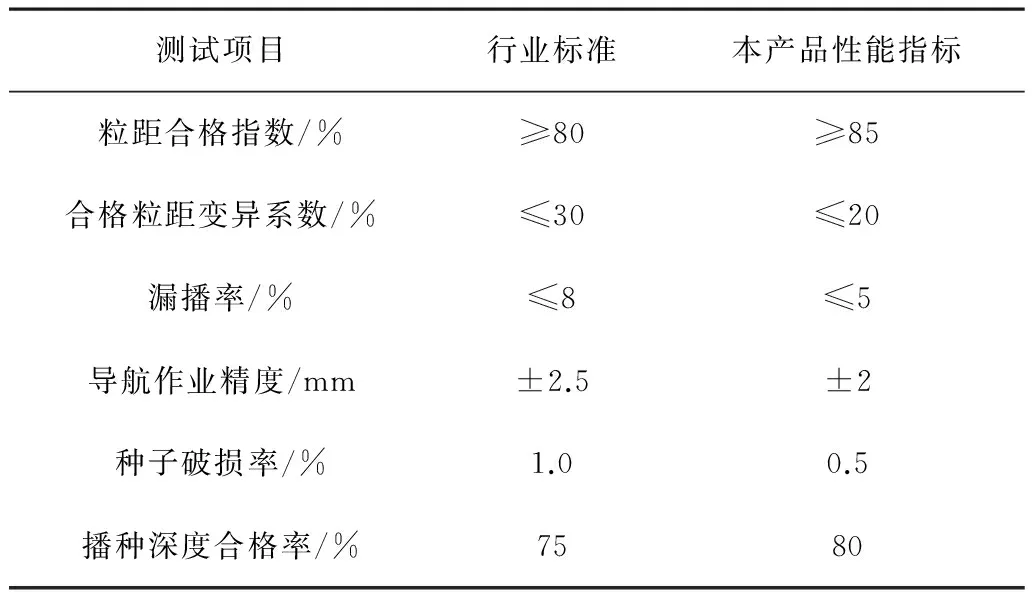
表3 试验检测结果Table 3 Testing results of the corn planter
4 结论
试验证明:采用气吸式精量玉米免耕播种机,播种株距稳定,行进直线度高,产量可提高5%~10%,减少了作业量,大大提高了效率,解决了作业行进直线度不高,株距不稳定等问题。其主要技术指标达到国外同类产品先进水平,具有广阔的发展前景,推动了我国电动式气吸精量玉米免耕播种机技术的发展。
[1] 张波屏.播种机械设计原理[M].北京:机械工业出版社,1982:288-291.
[2] 张德文,李林,王惠民.精密播种机械[M].北京:中国农业出版社,1982:42-53.
[3] 马成林,陈晓光,左春柽,等.播种机械土壤工作部件基本特性的研究[J].农业工程学报,1992,12(4):41-42.
[4] 高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):14.
[5] 朱光明,杨林,李洪文.2BQMF5型气吸式施肥免耕播种机的设计与试验[J].农机化研究,2008(7):84- 86.
[6] 尤晓东,张旭,刘忠泽,等.2BQM-2型免耕气吸播种施肥机的研制与试验[J].农机化研究, 2009,31(7):38-40.
[7] 李林.气吸式排种器理论及试验的初步研究[J].农业机械学报,1979,10(3):56-63.
[8] GB/T 19392-2013车载卫星导航设备通用规范[S].
[9] 陈志.农业机械设计手册[K].北京:中国农业科学技术出版社,2007:303-314.