基于多跳无线网络和机器视觉的新式采摘机器人设计
2018-03-28谷利芬
谷利芬,谢 芳
(焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454000)
0 引言
随着农业采摘需求日益增长,国内外的专家和学者早在20世纪80年代就开始投入到采摘机器人的研究热潮中,到目前为止,多款机器人已经研发出来,如西红柿、黄瓜、猕猴桃等对采摘要求较高的机器人;但是,这些机器人尚未实现商品化生产[1-2]。我国是农业大国,对采摘机器人的需求量较大,在采摘机器人没有实现商品化前,对其研究具有重要的意义[3-5]。目前,影响采摘机器人自主作业的关键问题是机器人的通信和定位识别技术,因为在实际作业环境下会受到各种因素的干扰,机器人的定位和果实识别的准确度受到限制;而将多跳网络和机器视觉技术相结合,可以有效地提高采摘机器人的通行能力和定位识别精度,对于新式采摘机器人的研究具有重要的指导意义。
1 基于多跳网络节点定位的采摘机器人
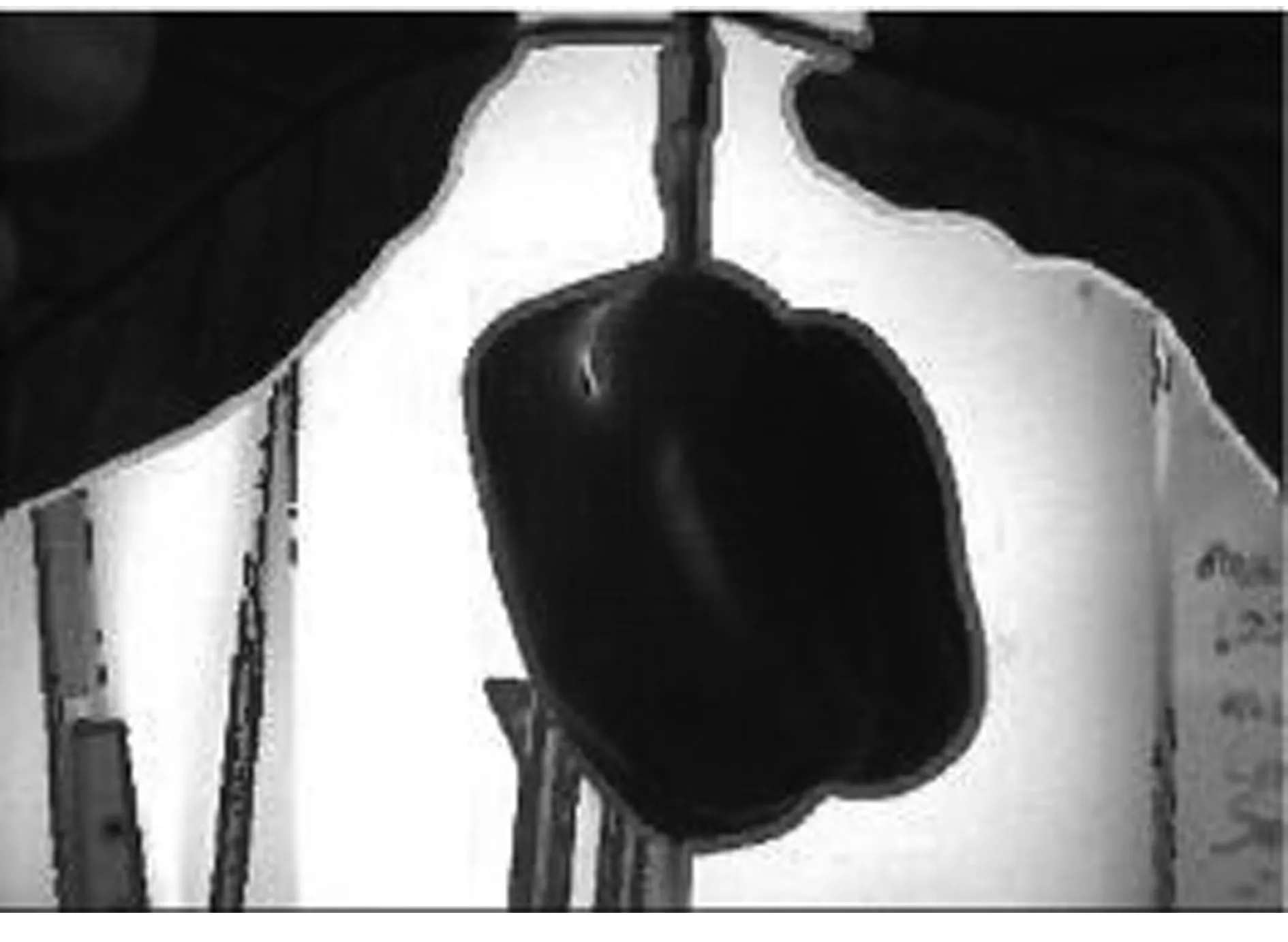
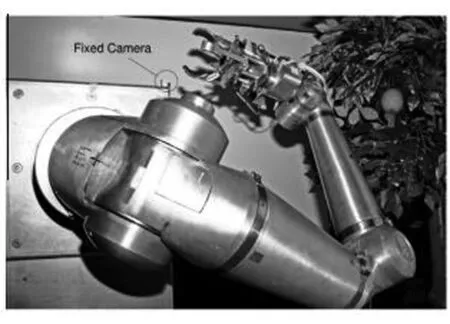
在采摘机器人果实识别时,常用的方法是对果实的特征进行识别,在获取果实图像后需要对果实图像进行处理,得到完整的边界,这便需要采用机器视觉技术[6-7]。在机器视觉方面,国内的很多专家和学者对其进行了大量的研究,也取得了一定的成果,如中国农业大学的黄瓜采摘机器人(见图1),可以利用光源补光的方法提高机器视觉的定位识别精度,但该款机器人在补光时消耗的能源较多,削弱了其性能[8-11]。

图1 黄瓜采摘机器人Fig.1 Cucumber harvesting robot
在大面积作业时,为了降低采摘机器人能源消耗,提高其整体性能,可以在识别果实前首先对待采摘果实进行定位,将传感器定位节点分布在待采摘区域可以实现待采摘区域的定位识别。在有局域网和基站分布的农作物场地,可以采用单跳网络,如图2所示。
无线单跳网络将源节点的数据集中发布到一个基站,然后通过转发的方式发布给转接点;但一般农田作业环境下,传感器节点的数量较多,覆盖范围广,而农作物作业场地很多都没有局域网覆盖,而节点又需要长时间的供电和长时间监测,这就需要引入多跳网络[12]。多跳网络模型如图3所示。
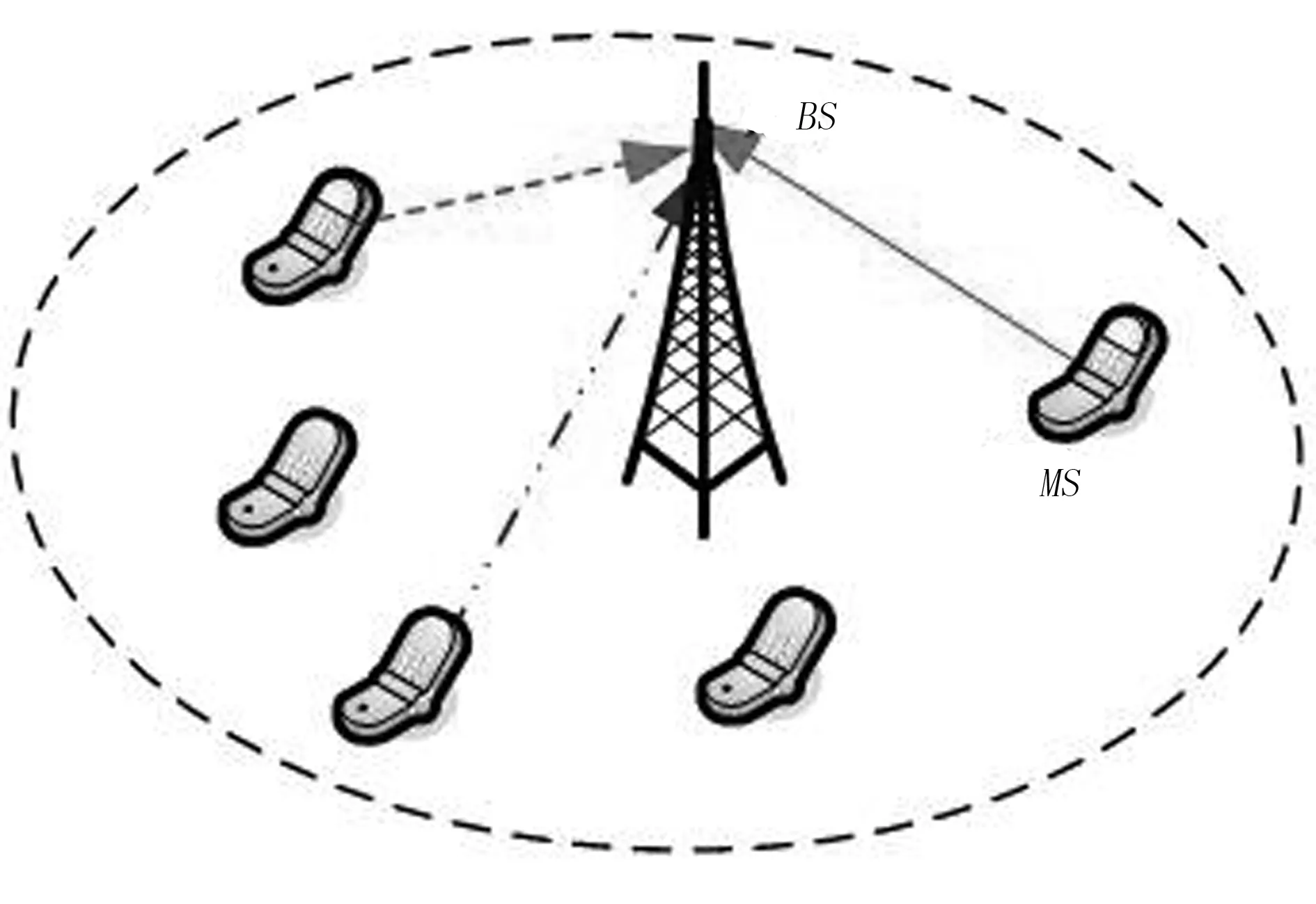
图2 无线单跳网络Fig.2 Wireless single hop network
图3 无线多跳网络Fig.3 Wireless multi hop network
无线多跳网络可以通过多个无线路由对接受数据进行转发,其部署简单,节省能量,采用无线多跳传输、节点,可以使定位节点周期性睡眠,从而保证了能源的供应;将其使用在采摘机器人定位系统中,有效地提高了系统的整体性能[6]。
2 采摘机器人定位算法
采摘机器人进行定位时,为使机器人能够快速做出响应,可以在使用机器视觉的同时,采用多跳自组织无线网节点定位模型算法,并可预先得到采摘目标或待采摘果实的信息,这些位置信息可以预先使用传感器节点标记[13]。假设采摘作业区域是一个二维空间区域平面,该区域平面存在着传感网络,该网络可以表示为S={S1,S2,…,Sm+n}。其中,m表示已标记的位置节点;n表示未标记的位置节点。定位坐标可以用公式表示为
pos(Sa)=(xa,ya)Tp=1,…,m+n
(1)
其中,Si∈B的位置是已经标记的,其余的节点Sj∈U位置是未知的;B={Si|i=1,2,…,m},U={Si|i=m+1,…,m+n},已标记位置采集到的最小跳数和距离分别被存储到两组数据集合中。节点Si到Sj的跳数为
h(Si,Sj)=H={0,1,2…}
(2)
节点Si到Sj的欧式距离为
(3)
将采摘机器人的定位节点分别分布在多跳自组织网络中,形成动态分布的实时定位虚拟环境,可以锁定待采摘果实的位置。本次设计采用树形网络结构,自组织网络相当于树干,而定位节点相当于树枝。其中,多媒体信息主体部分相当于树叶,而数据冗余部分别动态的分配到树叶结构中,对于树型结构函数用F表示,一般采用如下的结构树公式为
H(e,f,K)=
(4)
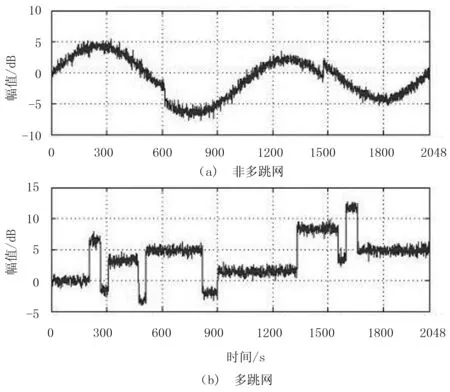
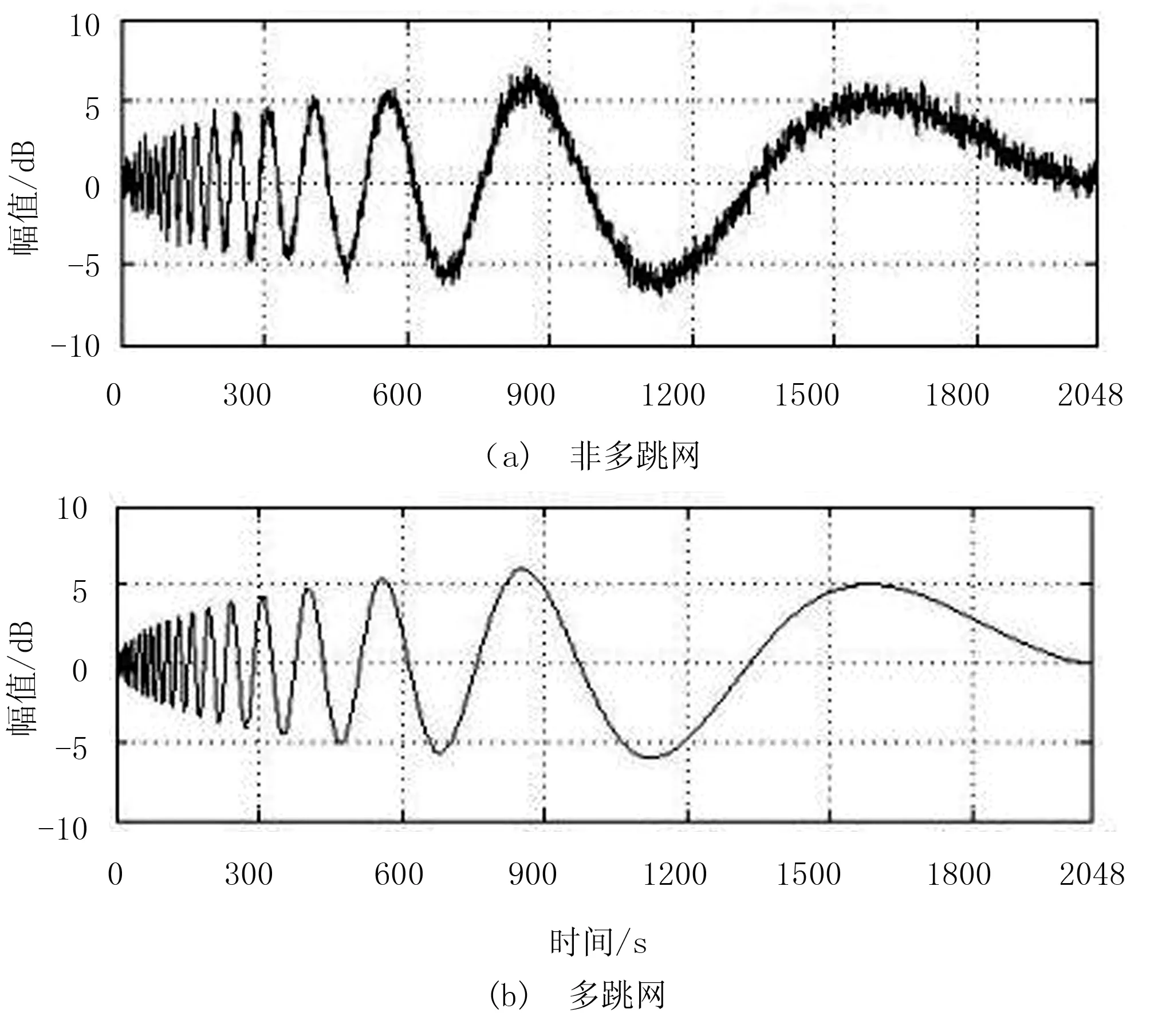
其中,e、f分别表示有无干扰时的信号强度,当e=f时,通信能力最好;当e (5) 采摘机器人在定位过程中多跳自组织网络会消耗大量能量,其功率损耗最大允许距离为 (6) 其中,Ym表示完全损耗功率;Yn表示干扰时的接收敏感度;Yc表示无线速率;λa、λb分别表示无线耗系数;Kp表示接口处的损耗;Lp表示多跳自组织网最大通信率。其中,自组织网络通信限制距离为 (7) 将获取的估计项获得预测模型,在进行定位时,除了对已知定位节点可以直接定位,还可以对未知节点进行坐标计算,其流程如图4所示。将已知的定位节点代入到测距模型中,可以获取相应的距离信息,结合已知节点的位置坐标和距离信息,可以对未知节点的位置区域进行估算,最终锁定待采摘区域。 多跳自组织网络可克服在复杂的采摘作业条件下,因为没有网络覆盖而无法完成各种网络功能的缺点,采用自组织网络,有效地实现了局部网络通信功能,且具有较好协同作业能力。下面主要对采摘机器人的多跳网络和机器视觉定位技术进行实验测试。 如图 5所示:为了验证多跳网络定位在采摘机器人上使用的可行性,以青椒采摘的作业环境为研究对象,通过对待采摘区域布置多跳网络定位节点,来验证多跳网络定位的可行性和定位通信能力。 图4 采摘机器人定位节点确定流程Fig.4 Determining process of positioning nodes of picking robot 图5 多跳网络定位节点布置Fig.5 Multi hop network positioning node arrangement 图6是采摘机器人高清相机实际捕捉到的待采摘青椒的果实图像,这种图像不能够被机器人直接识别,需要利用机器视觉技术对图像进行处理来锁定实际目标,处理后的结果如图7所示。由图7可以看出:采用视觉处理技术可以较为明显地提取果实的具体轮廓,为采摘机器人的精确定位提供可靠的定位数据。 为了验证其通信能力,分别对不同的定位方法引入了噪声源,通过测试降噪后的各项参数指标,评估其通信能力,如图8所示。其中,测试的项目主要包括误差、信噪比及互相关系数。均方差表示降噪前后的方差的平均值,该数值越小,则降噪和通信能力越好;信噪比表示噪声残留的程度,其值越高,表示信号残留的噪声越小,其通信效果越好;相关系数表示原始信号和降噪信号的相似程度,其值越大,通信效果越好。 图6 实际果实图像采集Fig.6 Real fruit image acquisition 图7 机器视觉图像处理Fig.7 Machine vision image processing 图8 采摘机器人实际采摘实验Fig.8 The actual picking experiment of picking robot 图9为噪声源信号的波形。为了验证采摘机器人多跳自组网的通信和抗干扰能力,在局部自组织网络中使用了干扰信号,通过测试不同定位方法的信号波形,得到了如图10所示的测试图。 图9 噪声源信号Fig.9 Noise source signal 图10 不同定位方法的降噪后通信结果Fig.10 Communication results after noise reduction in different positioning methods 采用不同的节点定位方法,降噪后得到的通信波形有所不同,对各组数据进行统计,得到了如表1所示的通信能力测试结果。 表1 通信能力测试结果Table 1 The test results of communication capability 由测试结果可以看出:采用多跳网络节点定位降噪后得到的SNR和ρ值要明显比普通传感器节点定位的高,而RMS值要比EDM低,从而验证了多跳网络节点定位方法的优越性。在噪声干扰的环境下,采摘机器人依然具有较好的通信能力,可以对待采摘区域实际较为精确的定位。 在采摘机器人定位系统的设计中引入了多跳无线网络,解决了农田作业条件下传感器定位节点数量多、范围广、能耗大、缺少局域网覆盖的问题,有效地提高了采摘机器人的整体性能。设计了采摘机器人的果实目标定位机器视觉系统,并对其进行了测试,结果表明:采摘机器人在待采摘区域准确定位后,可以有效识别青椒的轮廓边界,从而完成定位过程。对采摘机器人无线多跳网络进行了抗干扰和通信能力测试,结果表明:在噪声干扰条件下,采用多跳网络设计的采摘机器人定位系统可以保持良好的通信能力,可以完成准确的定位识别功能。 [1] 魏祥麟,胡永扬,王晓波,等.基于度分布的多跳无线网络干扰节点部署方法[J].南京理工大学学报, 2015,39(5):590-595. [2] 王艳,唐秀芳.基于昆虫协作机理的分布式无线传感器网络节能方法[J].南京理工大学学报,2013, 37(6):826-832. [3] 张迎胜,单志龙.线性回归在无线传感器网络定位中的应用研究[J].小型微型计算机系统,2014, 35(7):1500-1504. [4] 赵景堂,杜国明,李秀海.基于总体最小二乘法的二维坐标转换方法[J].黑龙江工程学院学报,2015, 29(1):21-22. [5] 陈荣,管吉兴,张喜明.数字Costas环的设计与实现[J].无线电工程,2010,40(3):24-26. [6] 孙言强,王晓东,周兴铭.无线网络中的干扰攻击[J].软件学报,2012,23(5):1207-1221. [7] 孙言强,王晓东,周兴铭.无线传感器网络中基于几何覆盖的Jamming攻击定位算法[J].通信学报,2010, 31(11):10-16. [8] 周世兵,徐振源,唐旭清.K-means算法最佳聚类数确定方法[J].计算机应用,2010,30(8):1995-1998. [9] 卢军,王贤锋,候德家.水果采摘机器人视觉系统研究进展[J].湖北农业科学,2012,51(21):4705-4708. [10] 熊俊涛,叶敏,邹湘军,等.多类型水果采摘机器人系统设计与性能分析[J].农业机械学报,2013,44(S1): 231-235. [11] 毕昆,赵馨,侯瑞锋,等.机器人技术在农业中的应用方向和发展趋势[J].中国农学通报,2011,27(4):469- 473. [12] 黄岩岩,李庆,张斌珍.鱼眼镜头的标定和畸变校正研究[J],计算机工程与设计,2014,35(9):3132-3135. [13] 周世兵,徐振源,唐旭清.K-means算法最佳聚类数确定方法[J].计算机应用,2010,30(8):1995-1998.3 多跳无线网络和机器视觉定位技术测试




4 结论