基于Flash和3D动画渲染技术的育苗机器人设计
2018-03-28叶凤华
叶凤华,叶 欢
(1.广东工业大学,广州 510090;2.广州美术学院,广州 510260)
0 引言
随着3D动画渲染技术的革新和市场需求的逐渐扩大,3D动画渲染技术被广泛的应用在许多领域,包括工业、农业、建筑业、化工和医疗等行业,因此更多的研究人员投入到了3D引擎技术的开发上,特别是Flash三维引擎技术。由于技术瓶颈,Flash和3D引擎技术在农机设计中的使用还较少,而采用该技术可以将真实的农机作业场景通过数字化处理后,利用计算机终端,使设计者将农机置身于真实的作业场景中,实现农机和作业场景的交互功能,对于农机的硬件改善和创新设计具有重要的意义。基于现代化农机的需求性和功能性分析,将Flash和3D引擎技术引入到农机数字化系统中,将会有效地提高设计的动态效果,从而提高农机设计的可视化水平。
1 基于Flash三维引擎的农机可视化技术
在农机3D场景的渲染过程中,一般而言,一个3D场景会包含多个几何单元,每个几何单元都是由真实图像通过离散提取出来的关键点,这些关键点可以由三角形组成,每个三角形由3个顶点组成。因此,在进行渲染时,一般需要定义一些顶点的集合,通过这些顶点来定义相关的场景信息,如贴图或顶点颜色,从而完成场景的渲染过程,如图1所示。
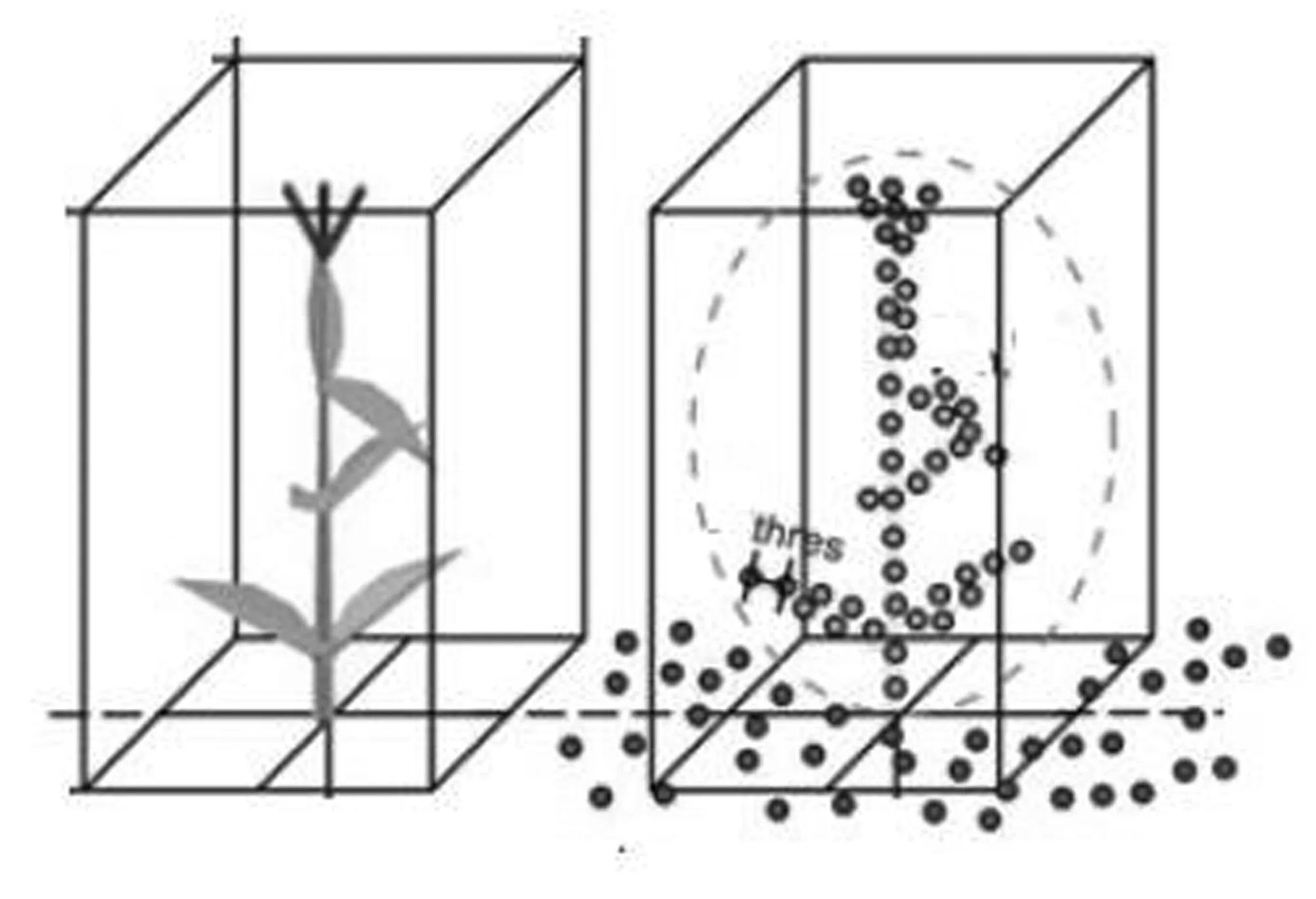
图1 三维场景渲染示意图Fig.1 Sketch diagram of 3D scene rendering
三维引擎的开发非常复杂,因为三维引擎系统的组成模块较多,包括各种渲染器、界面操作和输入输出文件管理系统等;另外,还有很多辅助性的工具箱,如脚本和场景编辑器等,这也需要大量的程序开发人员来设计。API是三维引擎设计和开发的主要技术支持,对三维引擎技术的研究主要是为了使程序开发设计人员以最短的时间设计出高效引擎系统,从而减少系统开发的开支。
图 2为农机三维引擎的层次结构。该结构基于Flash界面模块,将逻辑类型和管理输入封装为农机三维引擎类库,具有精灵、场景和摄像等功能,通过资源的管理,实现农机三维场景的渲染。

图2 三维引擎层次结构Fig.2 Three-dimensional engine hierarchy
2 基于小波重构的3D场景渲染

(1)
而离散化小波变换系数则可表示为
(2)
其重构公式为
(3)
其中,C是一个与信号无关的常数。假设一个二维信号f(x1,x2),x1,x2表示信号在空间内的横坐标和纵坐标,基本小波函数为ψ(x1,x2),若ψ(x1,x2)=φ(x1)·φ(x2)。则可以令ψ(x1)是与φ(x1)对应的一维小波函数,于是可以将二维小波函数分离成3个正交小波基函数,即
ψ1(x1,x2)=φ(x1)φ(x2)
(4)
ψ2(x1,x2)=φ(x1)φ(x2)
(5)
ψ3(x1,x2)=φ(x1)φ(x2)
(6)
三维小波重构的方法也以此类推,利用一次小波变换可以将图像分解成一个低频子带LL和3个高频子带。其中,高通水平和低通垂直子带用HL表示,低通水平和高通垂直子带用用LH表示,高通水平和高通垂直子带用HH表示。通过一次小波变换后,分辨率变成原来的一半,频率范围也减半。在进行第二次小波变换时,只对低频子带进行变换,将其分解成LL1、LH1、HL1和HH1,通过第2次小波变换后,其分辨率变为原来的1/4,频率范围进一步减半,以此类推。所以,通过一次小波变换可以得到4个子带,通过M次分解可以得到3M+1个子带,如图3所示。
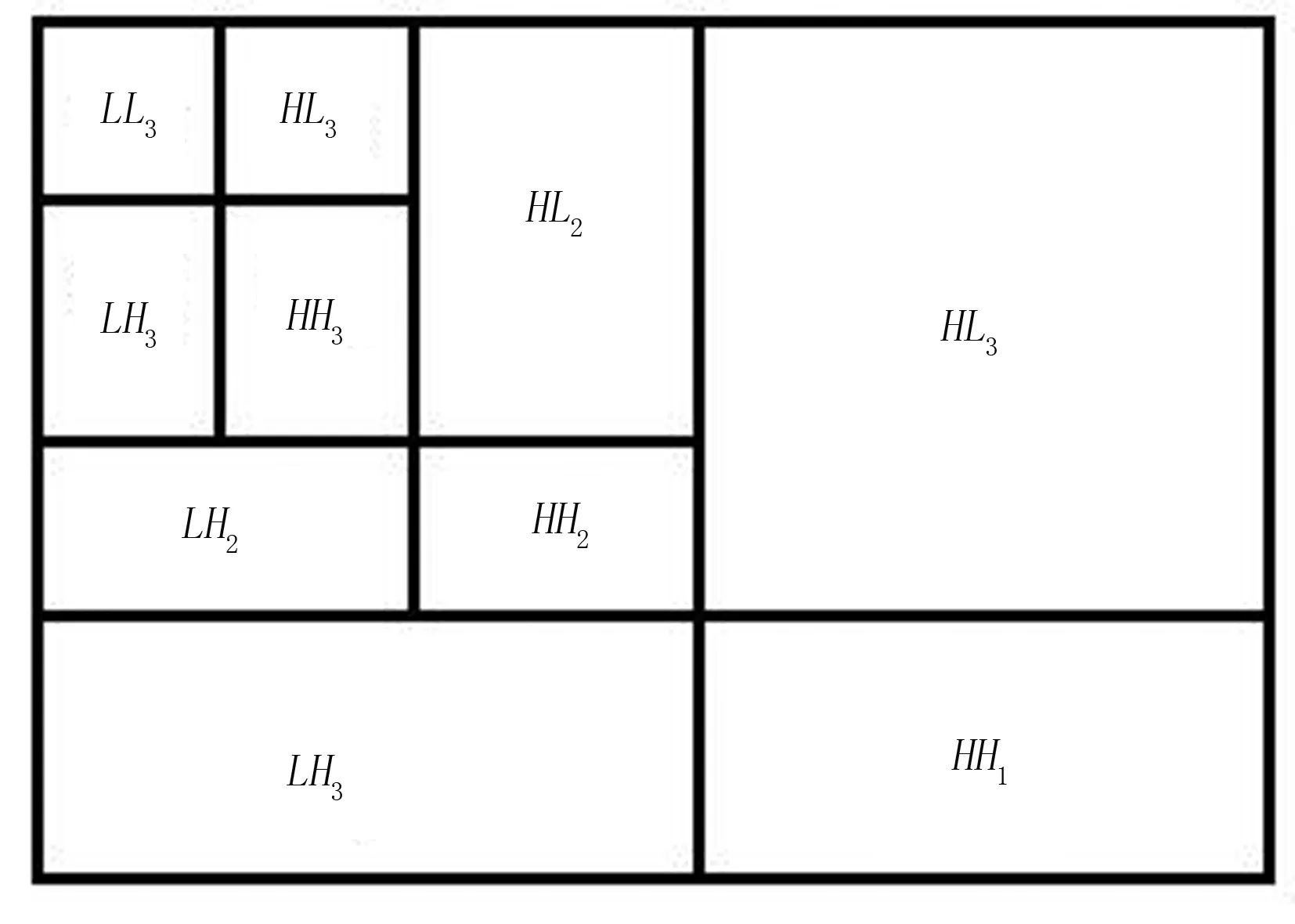
图3 图像的三级小波分解图Fig.3 Three level wavelet decomposition of image
根据小波算法的特点,结合系统的需求和功能,设计了系统的开发流程,最主要的是利用模型和材质建立虚拟仿真模型,然后使用Flash3D引擎,对虚拟系统进行集成开发,其流程如图4所示。
图4 农机在线虚拟渲染流程Fig.4 Online virtual rendering process of farm machinery
首先是场景的拍照,这是作业场景环境渲染的基础;然后,通过图像处理提取环境图像的关键信息,利用关键信息进行3D建模操作。在3D建模过程中可以借助Flash提供的3D引擎,利用其资料库中的材质,并使用压缩技术,提高在线渲染的设计效率,通过在线设计渲染可以输出农机的作业情节,从而为交换式的设计提供参考。
3 基于Flash和3D技术的玉米育苗机器人作业场景渲染
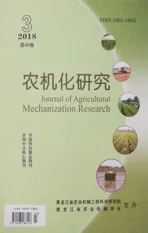
为了使3D渲染场景更加接近于现实场景,在真实的玉米育苗农田环境下,对作业场景进行了图像采集,通过图像的离散化和图像的重构技术,对真实环境进行虚拟化渲染,以达到逼真的效果,实现交互式设计。
图5为农田育苗作业场景的3D图像采集示意图。利用高清摄像头对玉米图像进行采集后,使用机器人上搭载的笔记本电脑对图像进行实时的处理,通过图像离散化得到了如图6所示的处理结果。

图5 农田作业场景3D图像采集Fig.5 The 3D image acquisition of farmland operation scene

图6 农作物图像离散化Fig.6 Crop image discretizati
根据图像的色彩可以将图像离散成许多微小单元,这些单元可以进行修改,从而实现图像的重构,达到环境和农机交换性的设计效果。通过作物三维重构得到了如图7所示的作物渲染效果图。
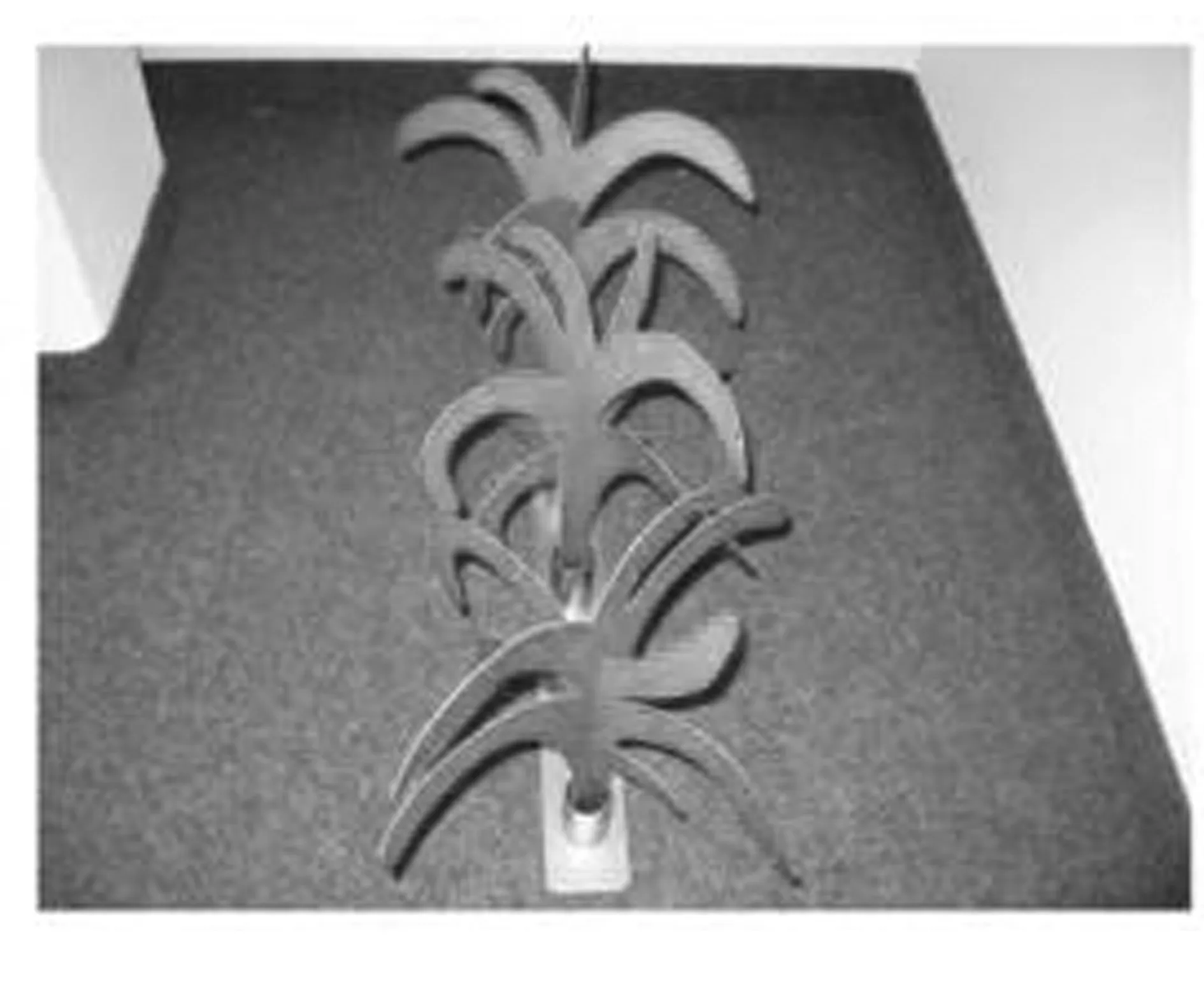
图7 农作物图像渲染效果Fig.7 Crop image rendering effect
利用Flash和3D技术对图像进行重构后得到的3D渲染效果,将作物至于更大的三维空间内,可以实现农机的三维作业场景渲染,通过渲染得到了如图8所示的三维渲染效果。
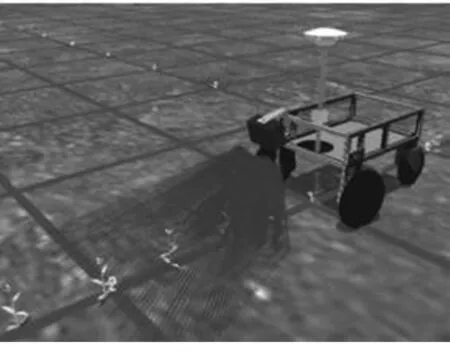
图8 育苗机器人作业场景渲染Fig.8 Working scene rendering of seedling robot
由图8可以看出:利用渲染效果可以虚拟育苗机器人的作业场景,实现设计和产品仿真的交互性效果。3D系统的渲染需要较大的计算开支,而利用小波重构和Flash软件压缩算法可以有效的降低计算开支,利用程序设计可以实现对渲染场景材质的控制和共享操作。
由表1数据可知:利用小波重构技术,以Flash格式存储材质文件,实现了3D场景大文件的压缩,但3D场景的效果并不受影响,从而加快3D动画场景渲染的解析速度,实现了3D资源材质的优化配置。
4 结论
为了提高农机现代化设计的可视化水平,引入了Flash和3D渲染技术,通过3D引擎实现了农机产品作业场景的三维渲染。使用Flash和小波重构方法,在基本不影响效果的情况下,实现了极大程度的压缩,从而使农机3D可视化渲染过程的计算开支更少,保证了系统的流畅性。最后,以育苗机器人为例,展示了农机设计的可视化渲染过程,说明3D动画渲染技术在农机产品可视化设计中应用具有可行性。利用直观、逼真的农机设计交互方式,会大大提高农机产品设计过程的信息含量,从而提高现代化农机设计的水平。
[1] 李逃昌,胡静涛,高雷.基于模糊自适应纯追踪模型的农业机械路径追踪方法[J].农业机械学报,2013, 44(1):205-210.
[2] 许国瑞,崔天时,李晓莉.农业机器人行走方向识别及仿真[J].农机化研究,2013,35(2):181-184.
[3] 侯茗耀,王库,党帅.黄瓜采摘机器人嵌入式系统的设计与实现[J].农机化研究,2009,31(8):57-60.
[4] 刘琼,安涛,金钢,等.基于 DM642 视频采集处理系统硬件设计[J].微计算机信息,2007,11(2):180-182.
[5] 张永光,张晓蕾,徐健健.DM642 图像数据传输的实现和优化[J].科学技术与工程,2007,9(17):4484- 4486.
[6] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3): 163-167.
[7] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170.
[8] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112.
[9] 刘佳,崔涛,张东兴,等.玉米种子分级处理对气力式精量排种器播种效果的影响[J].农业工程学报,2010, 26(9):109-113.
[10] 刘立晶,刘忠军,李长荣,等.玉米精密排种器性能对比试验[J].农机化研究,2011,33(4):155-157.
[11] 王铁固,赵新亮,张怀胜,等.玉米产量的边际效应及与主要农艺性状的相关分析[J].中国农学通报,2012,28(18):122-126.
[12] 王铁固,赵新亮,张怀胜,等.玉米产量及主要农艺性状的边际效应[J].广东农业科学,2012,39(4):22-25.
[13] 曹冬梅,丁明亚,方继友.行端边际效应对玉米品种试验造成的误差[J].中国种业,2008(8):52-53.
[14] 金衡模,高焕文.玉米精播机漏播补偿系统设计[J].农业机械学报,2002,33(5):44-47.
[15] 张晓辉,赵百通.播种机自动补播式监控系统的研究[J].农业工程学报,2008,24(7):119-123.
[16] 韩建国,王金斌,于磊.补偿式玉米精密播种机的研究[J].农业装备与车辆工程,2010(8):10-12.
[17] 周利明,王书茂,张小超,等.基于电容信号的玉米播种机排种性能监测系统[J].农业工程学报,2012, 28(13):16-21.
[18] 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33.
[19] 方莉娜,杨必胜.车载激光扫描数据的结构化道路自动提取方法[J]. 测绘报,2013,42(2):260-267.
[22] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[23] 刘荣军,张长利,张晓雨.基于DM9000的S3C2410嵌入式系统的以太网接口设计[J].中国高新技术企业,2010(7):150-152.
[24] 李军,马蓉.基于多传感器融合的拖拉机自动导航技术[J].农机化研究,2011,33(12):58-60.
[25] 瑛宣.Linux下NFS(网络文件系统)的建立与配置方法[J].计算机与网络,2013,39(21):44-45.
[26] 王冬,王超,韩永,等.iSCSI与NFS的协议开销对比[J].计算机工程与应用,2012,48(36):105-111.
[27] 陈宁,周志峰.一种纯追踪模型改进算法[J].轻工机械,2014(4):69-72.
[28] 张成,王听,史建卫,等.一种亚像素圆检测的新算法[J].理论与研究,2009(3):14-17.
[29] 陈娟,陈乾辉,师路欢,等.军图像跟踪中的边缘检测技术[J].中国光学与应用光学,2009(1):49-52.
[30] 刘昶,朱枫,夏仁波.基于共面二点一线特征的单目视觉定位[J].计算机应用研究,2012,29(8): 3145-3147.
[31] 刘金颂,原思聪,江祥奎.Zernike矩和曲率的圆形中心 亚像素定位 [J].计算机工程与应用,2010,46(29): 153-155.
[32] 佟帅,徐晓刚,易成涛.基于视觉的三维重建技术综述[J].计算机应用与研究,2011,28(7):2412-2417.