飞翼布局飞机低阶等效拟配方法
2018-03-28丛斌王立新
丛斌,王立新
(北京航空航天大学 航空科学与工程学院,北京 100083)
飞翼布局飞机取消了水平和垂直安定面,三轴稳定性明显下降;且多采用升降副翼、阻力式方向舵等新型操纵舵面,操纵特性存在较强的非线性以及多轴耦合性[1-2]。为确保飞行安全,其控制系统更加复杂,在进行飞行品质评定时往往需通过低阶等效拟配方法来获取相应的评定参数。由于飞翼布局飞机在气动特性、操纵特性、控制系统设计等方面与常规飞机差异较大,在实际工程应用中,常规高增稳飞机常用的低阶等效拟配方法并不完全适用,易导致低阶等效拟配的准确性与成功率下降。
目前,国外[3-5]与国内[6-9]不乏对常规高增稳飞机低阶等效方法与飞翼布局飞机飞行品质方面[10-13]的相关研究,但目前尚未见有针对飞翼布局飞机低阶等效拟配方法方面的研究成果报道,导致开展飞翼布局飞机低阶等效拟配时缺少相应的理论参考。针对上述情形,本文对飞翼布局飞机的特性进行了分析,进而开展了适用于飞翼布局飞机的低阶等效系统拟配方法研究,针对其与常规飞机的区别对拟配方法提出了相应的修正建议。
1 低阶等效拟配原理
高阶系统的低阶等效系统是指,当2个系统在相同的初始条件下,受到同样的外界激励作用,在一定的频率范围或时间区段内,相应输出量的差值在某个指标下达到最小,则称该低阶系统是满足某些条件的高阶系统的低阶等效系统[14]。
飞翼布局飞机经控制增稳后通常不会出现明显的长周期模态运动特性,飞机飞行品质评定时无需对其长周期运动模态特性进行评定,因此,对飞翼布局飞机进行飞行品质评定时可仅对短周期运动模态进行分析。根据 MIL-STD-1797[15],评价短周期俯仰响应的飞行品质时,采用如下拟配模型:
式中:F为纵向杆力或杆位移;q为俯仰角速率;nz为法向过载;Kq和KNz为等效传递函数的增益;ωsp与ζsp分别为短周期自然频率与阻尼;Tθ为等效短周期分子时间常数;τeθ和τNz为传递函数等效延迟时间;s为拉氏变换后的变量符号。
横航向采用如下低阶等效模型进行拟配:
式中:Fa为横向杆力或杆位移;Fr为偏航轴操纵力或位移;φ为滚转角;β为侧滑角;Kφ和Kβ为等效传递函数的增益;τep和τeβ为传递函数的等效延迟时间;ζφ为滚转轴等效分子阻尼比;ωφ为滚转轴等效分子自然频率;Tβ1、Tβ2、Tβ3为航向轴等效分子时间常数;TR为滚转模态时间常数;Ts为螺旋模态时间常数;ζd为荷兰滚模态阻尼比;ωd为荷兰滚模态自然频率。
低阶等效模型的参数可以通过频域或时域拟配方法得到。飞机在特定频率范围内的特性对飞行品质等级的影响非常明显,采用频域方法可以突出高阶闭环飞翼飞机在主要频率范围内的特性表征;且飞机频率特性的图形(如伯德图)与拟配参数间的关系较直观,能够比较方便地确定参数并形成低阶等效模型,故飞行品质规范与诸多文献都建议优先采用频域方法来求取飞机等效系统的参数[14]。
频域方法的主要思路为,假设高阶系统的频率特性的幅值和相角分别为GHOS(jωi)和φHOS(jωi),求解出的低阶等效系统频率特性的幅值和相角分别为GLOES(jωi)和 φLOES(jωi),寻求低阶等效系统中的相关参数,使下述指标函数最小:

式中:ΔG(jωi)为给定离散点上高阶系统与低阶系统频率特性的幅值差,dB;Δφ(jωi)为相应的相角差,rad;K为幅值误差和相角误差之间的加权系数;M为失配参数,用来表征低阶等效系统与高阶系统的近似程度。一般而言,失配参数越小,近似程度越高,反之,近似程度越低。在评价低阶等效系统的拟配效果时,通常若失配参数M≤20,则认为拟配效果良好[14];若失配参数 20<M≤100,则建议采用失配包络方法进行进一步的评价,如果各离散点处的误差均在失配包络线内,可认为拟配效果较好,而若存在离散点的误差超出包络线范围的情况,则认为拟配效果不佳,求得的系统不适合作为高阶系统的低阶等效系统;如果M>100,则通常认为拟配效果不好。
失配参数用于对低阶等效系统与高阶系统间的整体误差进行评价,而失配包络法则用于对各离散点的误差进行综合评价。图1中的点划线为失配包络线,通常飞行员对飞机系统动态响应最敏感的频段(1~4 rad/s)包络线范围较窄,而在其他频段包络线范围较宽。采用失配包络法时,如果在各离散点处误差处于包络范围内,则认为拟配结果是合理的。

图1 失配包络曲线Fig.1 M ismatched envelope curves
2 飞翼布局飞机运动特性
本文以某中等展弦比的飞翼布局飞机作为算例,计算所用原始数据均来源于中国空气动力研究与发展中心的风洞试验结果。
飞翼布局飞机的主要特点如下:
1)横航向稳定性较差
横航向静稳定性主要由机翼与垂尾提供,飞翼布局飞机横向静稳定性与常规飞机相近,但因没有垂尾,其横向静稳定导数Clβ值略小于常规飞机;由于取消了垂尾,飞翼布局飞机的航向静稳定导数Cnβ的值远小于常规飞机,且航向呈弱静不稳定特性;此外,其的数值远小于常规飞机,横航向稳定参数适配性较差,导致飞翼布局飞机的横航向响应特性与常规飞机相比有较大差别。进行横航向低阶等效拟配时,为了较好地激发飞机的运动模态,需结合飞翼布局飞机的响应特性开展激励指令信号联合适配设计。
2)三轴转动惯量较大
飞翼布局飞机采用全翼设计,机身质量分布相对分散,其三轴转动惯量相对同等尺寸、质量的常规飞机较大,对运动激励指令信号的响应能力相对较差,易导致低阶等效指令无法较好地激励出相应的运动模态。进行低阶等效拟配时应选取可充分激发飞翼布局飞机运动模态的指令信号。
3)舵面操纵分配
飞翼布局飞机通常采用多组升降副翼控制俯仰与滚转轴运动,升降副翼联动偏转实现俯仰操纵,差动偏转实现滚转操纵,完成同一操纵任务时可能具有多组操纵方案;阻力式方向舵偏转时会产生操纵耦合力矩,进行操纵时需升降副翼进行补偿[16],操纵布局如图2所示。为实现对飞机的有效控制,通常需设计控制分配模块。飞翼布局飞机的三轴操纵输入与三轴操纵舵面偏角不再成对应关系,其操纵输入指令通过控制系统直接控制对应轴的运动参数。

图2 算例飞翼布局飞机Fig.2 Example aircraftwith flying wing
为保证飞翼布局飞机符合飞行员的操纵习惯,算例飞机纵向杆指令对应飞机迎角指令,横向杆指令对应滚转角速率指令,偏航轴输入指令对应侧滑角指令,操纵输入指令与飞行状态指令近似呈线性关系。在下文中,为便于开展时域特性分析,绘图时统一将操纵输入指令转化为对应的运动状态指令。
4)气动与控制系统非线性
飞翼布局飞机气动力和舵面操纵效能非线性特性明显,一般多采用滑模、动态逆等非线性控制系统实现飞翼布局飞机的飞行控制[17]。
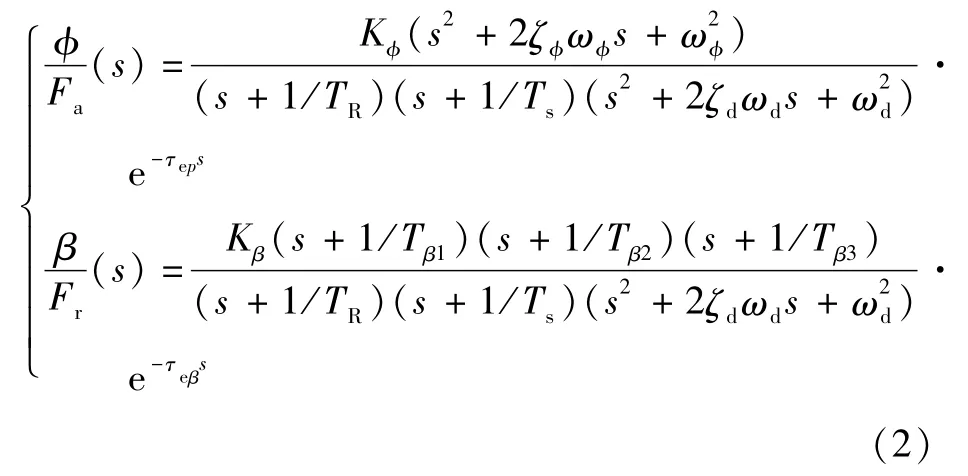
算例飞机采用非线性动态逆飞行控制系统设计方法的总体结构如图3所示,图中:Yr为指令实际响应;ωr为实际角速度响应;˙ωc为指令对应角加速度指令;Bm×n为控制矩阵。整个飞行控制系统分为指令生成、指令解算、指令分配3个模块。指令生成模块将操纵指令Yc通过期望参考模型生成适合飞行品质要求的参考指令Y·c;指令解算模块根据飞行状态、飞机的运动特性和刚体转动特性解算生成任务所需的三轴力矩Mc;指令分配模块由相关优化方法将解算所得三轴力矩分配到相应的操纵舵面δc。
图3 非线性动态逆飞行控制系统结构Fig.3 Architecture of nonlinear dynam ic inverse flight control system
为满足飞行品质的要求,令迎角、侧滑角的期望响应与指令之间的关系应符合二阶动态特性,滚转角速率期望响应与指令之间的关系应满足相应快速性指标的一阶动态特性,系统的期望模型如下所示:

式中:α为迎角;αc为迎角指令;βc为侧滑角指令;p与pc分别为滚转角速率响应与指令;ζα与ωα分别为迎角响应的阻尼与自然频率;ζβ与 ωβ分别为侧滑角响应的阻尼与自然频率;Tp为滚转角速率响应的一阶时间常数。本文中迎角响应参考模型的阻尼取为0.7,自然频率取为4 rad/s;侧滑角响应参考模型的阻尼取为0.7,自然频率取为3 rad/s;滚转角速率响应参考模型的一阶时间常数取为0.33 s。非线性控制系统根据飞机响应与参考模型响应的差值解算控制指令,使飞翼布局飞机高阶系统的时域响应呈现与低阶等数参考模型相近的特性。
与线性控制系统在参考状态点附近控制系统参数相对固定不同,非线性控制系统在响应过程中根据不同时刻飞机运动参数与参考模型运动之差实时解算,等价于控制参数实时改变,系统非线性更强,运动特性更为复杂,导致飞翼布局飞机对拟配指令的强度更为敏感。此外,飞翼布局飞机纵横向操纵耦合也会为运动响应引入不期望的附加运动模态,对系统的频域响应特性产生明显的影响,使其在特定频段内拟配的准确性与成功率下降。
3 拟配频率范围选取
在进行飞机纵向短周期与横航向低阶等效拟配时,MIL-STD-1797[15]建议拟配的频率范围选为0.1~10 rad/s[17],而在实际工程应用中,拟配频率范围可根据飞机的特点进行适当地调整[9,11]。
飞翼布局飞机的非线性控制系统会对飞机的运动响应引入附加模态。图4为算例飞机在高度5000m、飞行速度0.6Ma飞行状态下的纵向时域响应经傅里叶变换后在0.1~10 rad/s频率范围内的q/F伯德图。从图中可以看出,其幅值曲线在大于0.5 rad/s的频率范围内与典型二阶系统频域特性相近,而低频段有不规则的突起。算例飞机在高增稳控制系统作用下并无明显长周期运动,该段凸起并非长周期运动引起,而是非线性系统在跟踪参考模型过程的附加模态产生的。拟配的本质为通过参数优化方法求取一组参数使优化目标(失配参数)为极小值,低频区域的不规则段使0.1~10 rad/s频率范围内高阶系统的频域特性与典型二阶频域特性相差较大,如式(1)中的q/F低阶等效模型在0.1~10 rad/s频率范围拟配结果与实际相差较大,以该拟配结果作为评定参数所得的飞行品质评定结果会与实际的响应特性及操纵感受有较大偏差。
针对上述情形有2种解决方法:一种是根据高阶系统频域特性修改低阶等效拟配模型,另一种是修正拟配频率范围。MIL-STD-1797[15]中短周期飞行品质评定的CAP准则与等效参数准则均以短周期自然频率 ωsp、阻尼 ζsp与等效短周期分子时间常数Tθ等作为反映短周期飞行品质的主要参数,而通常飞机的短周期自然频率设计范围也接近1~4 rad/s,评定准则中对于飞行员不敏感的低频段与高频段特性的关注度不高。针对低频段或高频段模态特性建立阶次更高的等效模型对于开展飞行品质的评定研究实用性意义不大,且该方法通用性较差、过程复杂;而修正拟配频率方法可在不改变系统频域特性的基础上较为准确地求取关注段的特性参数,实现简单,工程实用性相对更高。因此,建议在拟配计算时根据频域曲线对拟配频率范围进行取舍,去除受附加模态影响导致非线性明显的频段,求取飞行品质评定关注段的等效参数。将拟配频率范围缩小为0.5~10 rad/s后,算例飞机的q/F伯德图如图5所示。可以看出,摒除了低频段附加模态的干扰后,图中的曲线更符合典型二阶模型的频域特性。

图4 算例飞机q/F伯德图Fig.4 q/F Bode diagrams of example aircraft
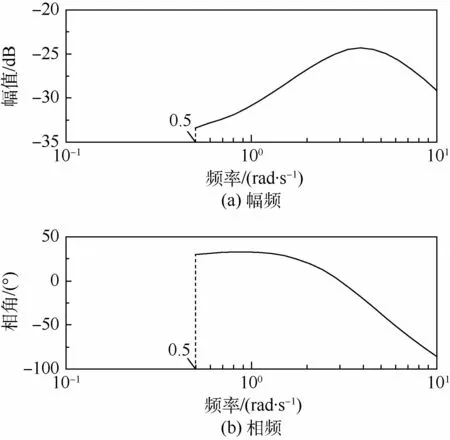
图5 缩小拟配频率范围后的算例飞机q/F伯德图Fig.5 q/F Bode diagrams of example aircraft after frequency range reduction
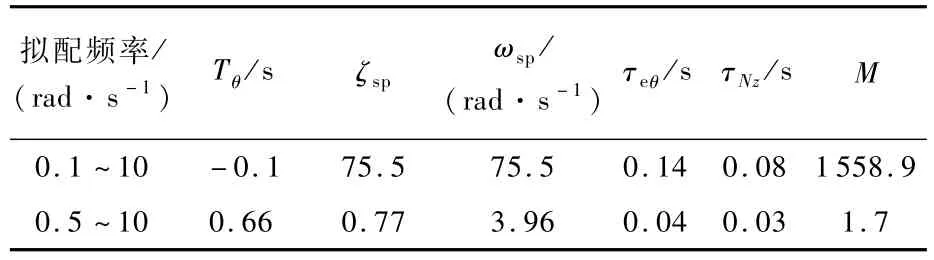
表1 算例飞机不同拟配频率范围下的纵向低阶等效拟配结果Table 1 Longitudinal low-order equivalent matching results of example aircraft under different matching frequency ranges
表1为以上述2种频率范围进行纵向低阶等效拟配所得结果的对比,从表中可以看出,修正拟配频率后所得的失配参数更小;将拟配结果中的短周期自然频率和阻尼与控制系统参考模型的设计值对比后可以看出,修正拟配频率范围后的结果与参考模型更接近,准确性与可靠性相对更高。
飞机横航向低阶等效模型的传递函数阶次较高,包含比例、惯性、一阶微分、二阶微分、振荡等众多环节,拟配过程可调整的参数多,较容易得到合适的拟配结果,因而其拟配结果受拟配频率范围影响较小;而纵向短周期低阶等效模型传递函数阶次较低,仅包括比例、振荡、一阶微分等环节,可调整的参数较少,附加模态的影响会导致系统失配参数明显增大,因而其拟配结果受拟配频率范围影响明显。
综上,在对飞翼布局飞机的纵向拟配过程中,应首先对飞机的频域特性进行分析,在保证驾驶员最敏感、最为关注的1~4 rad/s频段内拟配准确度的前提下,选出符合二阶特性的区段,确定合理的拟配频率范围。
4 激励指令信号设计
4.1 指令信号形式选择
常规飞机常用的指令信号包括方波、“3211”及扫频信号,其中方波信号属于短时指令信号,“3211”与扫频信号属于长时指令信号[7]。为分析3种指令信号对飞翼布局飞机的适用性,分别对算例飞机在上述3种指令信号作用下的响应进行仿真及低阶等效拟配。
图6为算例飞机高度5 000 m、飞行速度0.6Ma飞行状态下对3种指令信号的迎角响应曲线。由于飞翼布局飞机对指令信号的响应能力相对常规飞机较差,其对短时指令信号的响应相对较好。从图中可以看出,算例飞机对于方波信号的响应曲线最接近参考模型,二者间主要区别在于响应时延;“3211”信号响应曲线的极值略小于参考模型曲线,飞机未能充分跟踪参考模型;对于扫频信号,其响应曲线与参考模型的响应曲线差异较显著。
表2为3种指令信号响应低阶等效拟配的结果,从表中可以看出,对于飞翼布局飞机,以方波、“3211”信号作为指令可得出拟配结果,失配参数均小于20,其中方波信号得到的失配参数较小;将短周期自然频率与阻尼拟配结果与参考模型参数对比后可看出,方波信号的拟配结果更接近控制系统的参考模型参数;而采用扫频信号由于时域响应差异过大,其拟配结果失配度非常大,且所得拟配参数不合理。

图6 算例飞机对3种指令信号的迎角响应曲线Fig.6 Angle of attack response curves of example aircraft to three types of command signals
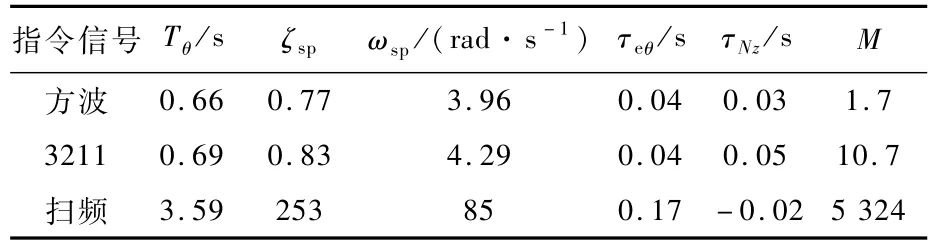
表2 算例飞机不同指令信号下的纵向低阶等效拟配结果Table 2 Longitudinal low-order equivalent matching results of example aircraft under different comm and signals
综上,由于飞翼布局飞机响应能力较差,对属于短时指令的方波信号的跟踪效果相对最好,采用方波信号更有利于实现对飞翼布局飞机运动模态的充分激励,因此,方波信号对于飞翼布局飞机低阶等效拟配的适用性较强。
4.2 指令信号强度设计
对于线性程度较高的系统,指令信号强度对运动响应的影响相对较小,而对于系统非线性程度较高的飞翼布局飞机,指令信号强度过强对拟配过程会产生不利影响。
指令信号的强度主要由信号幅值与时长决定。以纵向为例,分别对算例飞机在高度5 000m、飞行速度0.6Ma飞行状态下以不同幅值与不同时长的方波指令信号激励下的飞行进行了数学仿真及拟配。
图7为算例飞机对等效指令幅值为1°与3°的纵向方波指令信号的迎角响应曲线。从图中可以看出,等效指令幅值为1°时,算例飞机的响应曲线与参考模型的响应曲线较为接近;当等效指令幅值为3°时,飞机的响应与参考模型的响应曲线相比出现了明显的超调,响应的延迟也显著增强。过强的指令会导致飞翼布局飞机的运动状态有较大的变化,造成各时段内飞机的响应特性间相差较大,增大了以统一的低阶等效模型反映高阶系统全部特性的难度,不利于完成低阶等效拟配。
表3为算例飞机采用不同强度方波指令信号进行低阶等效拟配的结果,从表中可看出,指令幅值过大会导致失配参数超出100,拟配效果较差。
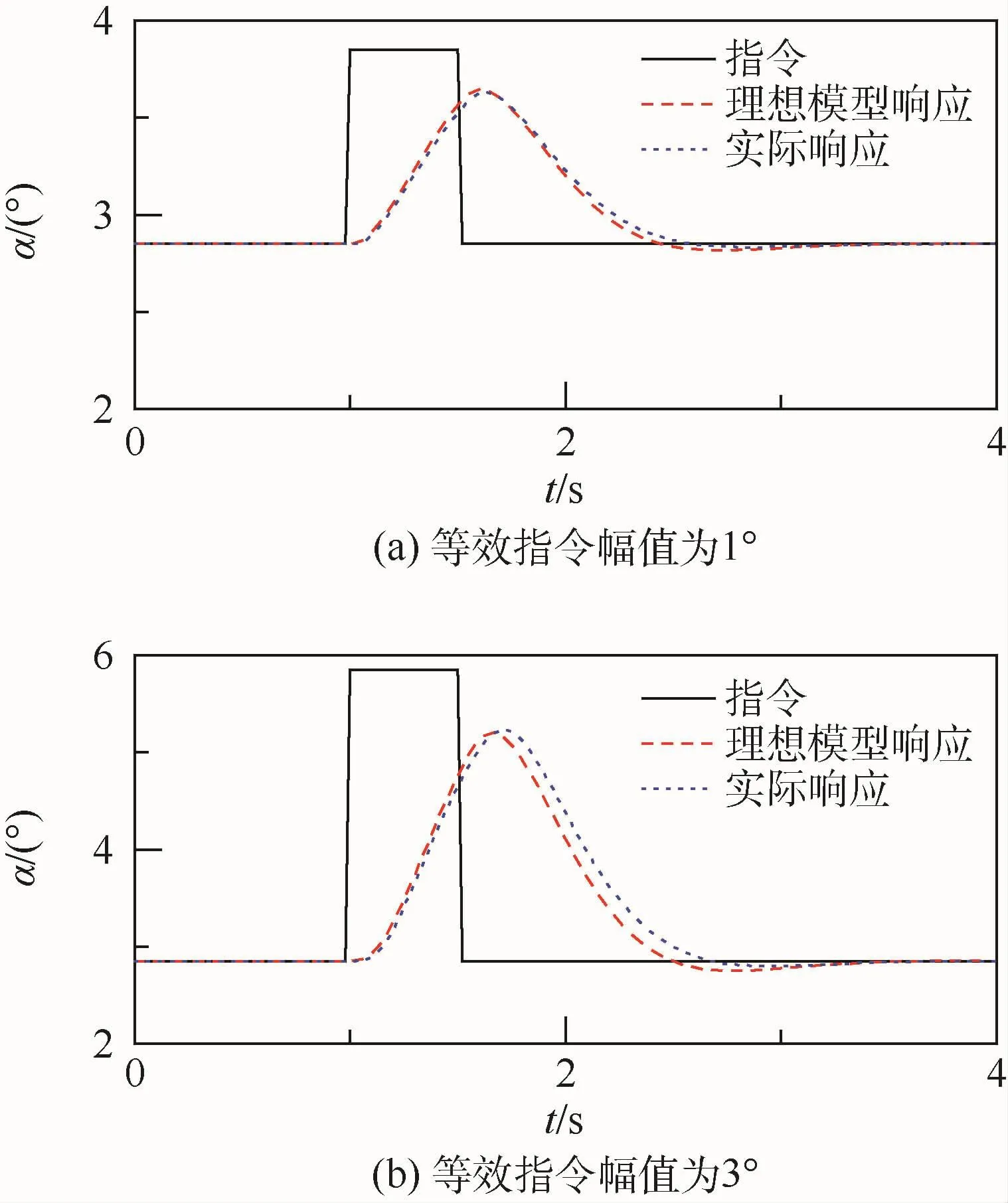
图7 算例飞机不同强度下方波指令信号的迎角响应曲线Fig.7 Angle of attack response curves of example aircraft at different strength of square wave command signal
表4为算例飞机采用不同指令时长时方波指令信号进行低阶等效拟配的结果。同样地,指令时长过长会导致失配参数超出100,拟配效果较差。
因此,在对飞翼布局飞机进行低阶等效拟配时,应结合飞机的响应特性对指令幅值与时长进行综合设计,指令强度不宜设计得过强。
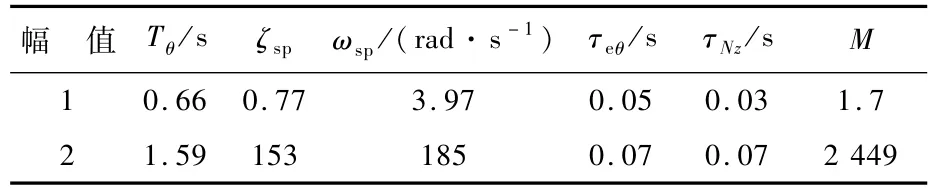
表3 算例飞机不同强度下方波指令信号的纵向低阶等效拟配结果Table 3 Longitudinal low-order equivalent matching results of example aircraft under different strength of square wave comm and signal

表4 算例飞机不同指令时长下方波指令信号的纵向低阶等效拟配结果Table 4 Longitudinal low-order equivalent matching results of example aircraft under different frequency comm ands of square wave signal
4.3 横航向激励指令信号联合适配设计
飞机横航向运动存在耦合,即飞机执行滚转轴指令时会引起偏航轴的运动,反之亦然。在进行低阶等效的双拟配过程中,飞机同时在偏航与滚转指令下运动,两指令的响应之间存在相互干扰,不利于横航向拟配的准确性。因此,在进行横航向拟配时,需对拟配指令进行设计,尽量保证飞机在滚转轴和偏航轴均有较好的响应特性。
图8为算例飞机在高度5 000 m、飞行速度0.6Ma飞行状态下,正滚转轴输入指令与正偏航轴输入指令(等效为 βc=3°,pc=0.15 rad/s)作用下的响应曲线。正滚转会引发正侧滑,从图中可以看出,在正滚转轴响应引发的耦合效应影响下,飞机的侧滑角响应相对理想模型产生了超调,拟配所得低阶等效系统的失配参数超过100,拟配结果较差(见表5)。而从图9中看出,在负滚转轴输入与正偏航轴输入指令(等效为 βc=3°,pc=-0.15 rad/s)作用下,两轴响应均较好,拟配所得低阶等效系统的失配参数较小;将拟配结果的滚转时间常数、荷兰滚阻尼和自然频率与横航向响应理想模型设计值比较后可看出,同号指令结果要更接近理想模型设计值(见表5)。这是由于飞翼布局飞机本体航向弱静不稳定,滚转响应引起的耦合侧滑角不易及时消除,滚转轴指令与偏航轴指令同号会引起侧滑角响应产生较大的超调。因此,飞翼布局飞机横航向低阶等效拟配时,建议使用滚转轴与偏航轴反号的指令,以保证飞机在滚转轴和偏航轴均有较好的响应特性。

图8 算例飞机同号指令响应曲线Fig.8 Response curves of same-sign commands of example aircraft

表5 算例飞机不同指令下横航向低阶等效拟配结果Table 5 Lateral and directional low-order equivalent matching results of example aircraft under different comm ands

图9 算例飞机异号指令响应曲线Fig.9 Response curves of contrary-sign commands of example aircraft
此外,由于飞翼布局飞机横向静稳定性弱于常规飞机,侧滑角引起的滚转力矩相对较小;而其航向静稳定系数与阻尼远小于常规飞机,滚转轴指令对偏航轴的影响相对较强。因此,飞翼布局飞机的偏航轴指令强度不宜过低,以保证滚转轴指令对偏航轴产生的耦合效应不会对偏航轴的指令响应产生过大的干扰。图10为算例飞机在小幅值的偏航轴指令(等效为 βc=0.5°,pc=-0.15 rad/s)作用下的响应曲线。负滚转指令会引发左侧滑趋势,算例飞机的侧滑角指令的响应受滚转轴耦合作用抑制,与参考模型响应相比幅值明显减小。不同强度偏航轴指令下的拟配结果如表6所示,可以看出当偏航轴指令过弱时,其所得低阶等效系统的失配参数超过100,拟配结果较差。

图10 算例飞机小幅值偏航轴指令响应曲线Fig.10 Response curves of small-amplitude yaw axis commands of example aircraft
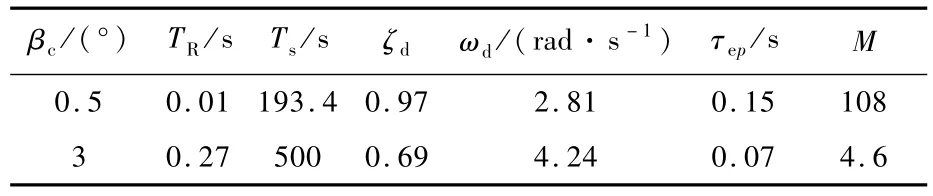
表6 算例飞机不同偏航轴指令下横航向低阶等效拟配结果Table 6 Lateral and directional low-order equivalent matching results of example aircraft under different yaw axis comm ands
综上,在设计横航向拟配指令时,应针对飞翼布局飞机的横航向响应特性开展联合适配设计,使滚转轴与偏航轴的指令反号,且设计偏航轴指令有足够的强度,以保证飞机在滚转轴和偏航轴均有较好的响应特性。
5 结 论
1)飞翼布局飞机的纵向频域特性会显著地受到系统非线性特性的影响,实际纵向拟配过程中,应对其频域特性进行分析,确定合理的拟配频域区段。
2)飞翼布局飞机响应能力较差,对属于短时指令方波信号的跟踪效果相对较好,方波信号对于飞翼布局飞机低阶等效拟配适用性最强。
3)飞翼布局飞机气动特性与控制系统均呈非线性特点,指令信号的指令强度不宜过强。
4)飞翼布局飞机横航向拟配时,建议使滚转轴与偏航轴的指令反号,且设计偏航轴指令有足够的强度,以保证飞机在滚转轴和偏航轴均具有较好的响应特性。
(References)
[1]马松辉,吴成富,陈怀民.飞翼飞机稳定性与操纵性研究[J].飞行力学,2006,24(3):19-21.MA S H,WU C F,CHEN H M.Study on stability and maneuverability of flying wing aircraft[J].Flight Dynamics,2006,24(3):19-21(in Chinese).
[2]李林,马超,王立新.大展弦比飞翼构型的横航向操纵特性[J].北京航空航天大学学报,2007,33(10):1186-1190.LI L,MA C,WANG L X.Lateral-directional control characteristics of high aspect-ratio flying wings configurations[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(10):1186-1190(in Chinese).
[3]JOHN H.History of low-order equivalent systems for aircraft flying qualities[J].Journal of Guidance,Control,and Dynamics,2005,28(4):577-583.
[4]EUGENE A.Low-order equivalent system identification for the Tu-144LL supersonic transport aircraft[J].Journal of Guidance,Control,and Dynamics,2003,26(2):354-362.
[5]JOHN H,PALOS V.History of low order equivalent systems for aircraft hand ling qualities analysis and design[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit.Reston:AIAA,2003:1-13.
[6]谭文倩,张曙光.飞机横航向等效拟配模型的对比研究[J].飞行力学,2003,21(4):14-18.TAN W Q,ZHANG SG.Research on the models of lateral and directional equivalent matching for an aircraft[J].Flight Dynamics,2003,21(4):14-18(in Chinese).
[7]崔益华,韩意新,陈永亮.电传飞机低阶等效系统频域辨识新方法[J].南京航空航天大学学报,2 01 6,4 8(3):432-437.CUIY H,HAN Y X,CHEN Y L.New frequency domain identification method for FBW aircraft based on low order equivalent system[J].Journal of Nanjing University of Aeronautics and Astronautics,2016,48(3):432-437(in Chinese).
[8]冀翔,夏洁.基于短时傅里叶变换的飞控纵向频域等效拟配[J].北京航空航天大学学报,2011,37(7):872-876.JI X,XIA J.Longitudinal frequency-domain equivalent matching method for flight control system based on short time Fourier transform[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(7):872-876(in Chinese).
[9]张勇.低阶等效系统方法的发展历史[J].飞行力学,2011,29(6):1-3.ZHANG Y.Development history of low order equivalent systems for aircraft handling qualities analysis and design[J].Flight Dynamics,2011,29(6):1-3(in Chinese).
[10]何明胜.飞行品质分析中的低阶等效模型研究[D].西安:西安电子科技大学,2006:1-8.HE M S.Research on low-order equivalent model in aircraft handling qualities[D].Xi’an:Xidian University,2006:1-8(in Chinese).
[11]田海燕.飞行品质中低阶等效系统的研究[D].西安:西安电子科技大学,2008:1-12.TIAN H Y.Research on low-order equivalent system in aircraft handling qualities[D].Xi’an:Xidian University,2008:1-12(in Chinese).
[12]李淼,王立新,李林.小展弦比飞翼构型作战飞机短周期品质评定方法[J].飞行力学,2009,27(5):21-27.LIM,WANG L X,LIL.Qualities assesses criterion of short period mode for flying wings with low aspect-ratio[J].Flight Dynamics,2009,27(5):21-27(in Chinese).
[13]李林,王立新.大展弦比飞翼作战飞机横航向飞行品质特性[J].北京航空航天大学学报,2009,35(6):661-664.LI L,WANG L X.Lateral-directional flying quality characteristics of high aspect-ratio combat flying wings[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(6):661-664(in Chinese).
[14]高金源,李陆豫,冯亚昌,等.飞机飞行品质[M].北京:国防工业出版社,2003:261-264.GAO J Y,LI L Y,FENG Y C,et al.Aircraft flying qualities[M].Beijing:National Defense Industry Press,2003:261-264(in Chinese).
[15]Department of Defence.Flying qualities of piloted aircraft:MILSTD-1797[S].Washington,D.C.:Department of Defence,1990.
[16]王磊,王立新,贾重任.飞翼布局飞机开裂式方向舵作用特性和使用特点[J].航空学报,2011,32(8):1392-1399.WANG L,WANG L X,JIA Z R.Control features and application characteristics of split drag rudder utilized by flying wing[J].Acta Aeronautica et Astronautica Sinica,2011,32(8):1392-1399(in Chinese).
[17] MA C,WANG L X.Flying-wing aircraft control allocation[C]∥47th AIAA Aerospace Sciences Meeting and Exhibit.Reston:AIAA,2009.