一种教学用六轴工业机器人的研制
2018-03-27彭建新黄伟朝
彭建新,黄伟朝
(肇庆市技师学院,广东 肇庆 526060)
六轴工业机器人在工业生产中应用最广泛,技工院校教学中也采用最多。由于厂家机器人的价格较高,实训教学中数量有限。为增加机器人的实训台位,需要开发一种具有一定替代性的六轴工业机器人。
1 机器人本体的设计
本文设计了一种负载0.5kg的六轴机器人本体,其机械结构采用工业中广泛应用的通用六轴工业机器人结构,如图1。
(1)机器人本体设计主要包括传动系统、电机选型和减速器的选型设计。本机器人本体采用六轴串联关节式结构型式。
为简化结构,机器人的6个关节均采用步进电机和减速器相结合的机械结构。如表1是各关节电机及减速器的型号、参数。
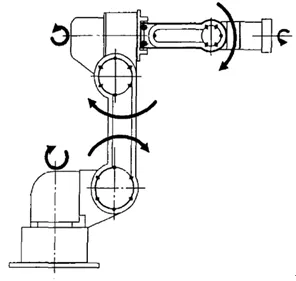
图1 六轴工业机器人结构
该机器人的主要性能指标有:本体重量:10g,最大回转半径 :646mm;负载能力:0.5g;末端定位精度:2mm。既可在PC机界面上操控,也可用手轮操作,PC机示教再现。

表1 电机与减速器的型号与参数
(2)步进电机选型的计算。电机保持力矩必须大于静态负载扭矩;惯量匹配,即使负载等效惯量不超过电机转子惯量的12倍;电机保持力矩减去静态负载扭矩的差值必须足够大。以上3点是选型步进电机应该满足的要求。下面以第二轴步进电机为例,说明选型过程。
首先,计算静态负载扭矩。当大臂和小臂呈直线且水平,手臂端点负载0.5kg,此种情况将产生最大的静态负载扭矩。用Pro/E软件的质量计算和重心测量的功能,测量大小臂加负载的总重量M是2.5kg,等效重心到第一轴的距离L是384mm。
静态负载扭矩T:T=M×g×L。
将负载重量和距离代入上式,计算得到静态负载扭矩:
T=2.5×9.8×0.384=9.6N·m。
已知减速器减速比i为45,则等效到电机轴的负载:Tz=T/i。
将负载重量和距离代入上式,计算得:Tz=9.6/45=0.213N·m。可见电机的最大静态扭矩必须大于0.213N·m。
其次,计算等效转动惯量。已知减速器减速比i为45,等效转动惯量:
Jd=Jm/i2=M×L2/i2
将重量和长度代入上式,计算得:
Jd=2.5×3842/452=182.04 kg·mm2。
根据惯量匹配原则,要求电机的转动惯量:
Jm> Jd/12=182.04/12=15.17 kg·mm2。
再次,初步选取电机。电机的最大静态转矩Tsm必须大于0.213N·m,且转动惯量大于15.17 kg·mm2。57BYG76-2.8A电机的最大静态转矩1.89N·m,转动惯量为48kg·mm2,满足上述2个要求,且有一定余量。
(3)减速器选型计算。最大静态转矩和运动精度是减速器选型的主要依据。本文设计的机器人对重复定位的精度要求小于2mm,等效转换到减速器的回程间隙是4弧分,为简化结构,采用自制涡轮蜗杆减速器。减速器的极限扭矩大于所传递的极限扭矩。本机器人所用减速器按上述要求选择,如表1所示。
(4)同步带选型计算。本文所设计的机器人的第一轴采用了同步带传动,已知所要传递的额定扭矩等于步进电机的保持扭矩1.89N·m。先选择带型XL梯形同步带,再选择皮带宽度5mm,皮带长200,选定皮带轮的齿数20。如果不满足要求,可以调整皮带宽度、带轮齿数、带型参数,然后计算校核,这样循环反复,最终找到合适的目标。
2 运动控制器的选择
本文所研制的机器人采用现成的nMotion-v5.0运动控制卡。该卡支持Mach3所有的版本,使用USB接口,无需驱动,支持热插。USB总线采用高档芯片磁耦隔离,是真正有价值的隔离。双核超高速CPU(单核最高主频204MHz)。6轴联动的脉冲输出频率最高达300kHz,可接伺服/步进电机。拥有16路隔离输入口,输入接口更简单,端口干湿接点均可。带有256字节NVRAM空间,可保存6个轴的座标值,下次上电无需找零点。
该运动控制卡的接线框图见图2。PC机通过USB接口与运动控制卡通讯,可完成运动规划、高速实时插补、伺服滤波控制和伺服控制,同时随控制器还提供功能强大的运动控制软件库,可供用户根据不同的需要开发应用软件,组成各种控制系统。
3 机器人控制系统
机器人控制系统用于对机器人的控制,以完成特定的工作任务。由于采用nMotion-v5.0运动控制卡,所以上位机控制系统采用Mach3 Mill程序。上位机选取通用PC机,以较低的成本组成较强性能的系统,而且还方便进行二次开发。
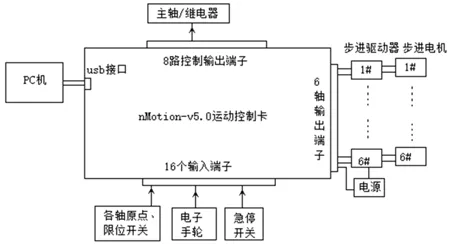
图2 nMotion-V5.0运动控制卡接线框图
(1)关于运动学逆解。Mach3 Mill是控制铣床的机床控制系统,最多可控制3个旋转、3个移动共6个自由度的运动,如用来控制六轴工业机器人的动作,必须进行空间坐标转换,即将目标点的空间坐标转换成6个轴的转动角度。为此,要进行运动学求解和逆解。
首先,建立一个固定的空间坐标系,然后通过坐标参数描述物体在该参考坐标系中的位置和姿态(简称位姿)。利用位姿矩阵实现不同坐标系中的空间坐标变换。设空间一点P在坐标系{A}和{B}中的齐次坐标分别为AP=(APX,APY,APZ,1)T和BP=(BPX,BPY,BPZ,1)T;则有关系式:AP=BAT.BP,其中BAT是坐标系B到坐标系A的变换矩阵。
工业机器人的旋转关节一般分成2种:转轴平行于连杆的(P型)和转轴垂直于连杆的(V型),见图3。1个关节单元由互相垂直的P型和V型关节连接而成。单元i的P型关节记为Pi,轴线方向(指向V型关节的方向)记为Pi;V型关节记为Vi,轴线方向记为Vi。
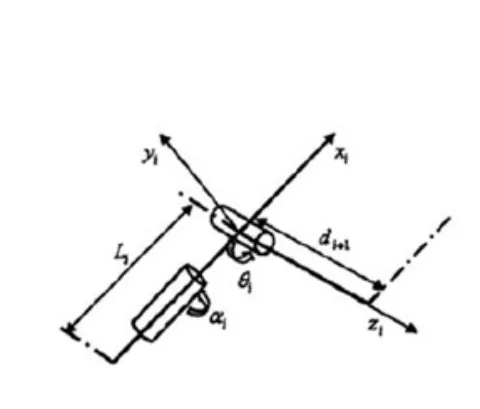
图3 关节单元模型
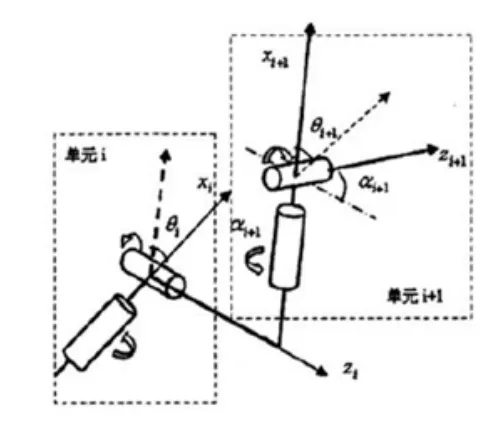
图4 相邻关节单元的关系
如图4,从关节单元i的坐标系到关节单元i+1的坐标系变换如下。
①绕着zi轴逆时针旋转θi,使得xi轴和xi+1轴平行。
②沿着zi轴平移di,使得xi轴和xi+1共线。
③沿着xi+1平移Li+1,使得zi轴和zi+1共面。
④绕着xi+1轴逆时针旋转аi+1,使得zi轴和zi+1共线。
因此,变换矩阵为:
i+1iT=Rot(z,θi)·trans(0,0,di)·trans(Li+1,0,0)·Rot(x,аi+1)
其中Rot(z,θi)是绕z轴旋转θi的旋转矩阵,trans(0,0,di)是在z轴平移di的平移矩阵,其它矩阵均类似。
经过整理,最后得到变换矩阵是:
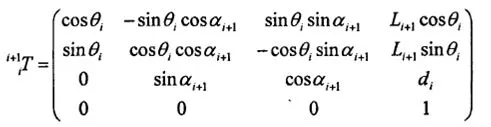
机械臂运动学方程就是要建立机械臂末端坐标系{n}关于基坐标系{0}的变换方程,只需将n个关节的变换矩阵依次相乘即可。

本文机器人有6个自由度,可以灵活地在三维空间中运动。该机械臂系统由4个关节单元连接而成,各个关节单元的参数见表2。

表2 机械臂结构参数
求解运动学方程也就是所谓机械臂的运动学逆问题,已知末端位置EG(或末端位姿EAT),求а1,θ1,а2, …а4。 设 P=(0,0,0,1)T, 则 有关系式 EG=EAT.P,求解方程:BAT(а1).CBT(θ1).DCT(θ2,а3).EDT(θ3,а4)=EG 则可得到各关节角度а1,θ1,а2,…а4。求解的方法有很多,限于篇幅这里不赘述。
(2)关于控制系统有关参数设置。①电机单位当量脉冲数。本机器人使用是二相步进电机,单位脉冲当量=200×驱动器细分数×减速比/丝杆导程(螺距),如驱动器细分数=16,丝杆导程=4mm,减速比=45,则单位当量=200×16×45/4=36000。对于转动,则角度脉冲当量=200×16×45/360=400,即每400脉冲转过1°。②Mach3中输入信号的配置。本运动卡的输入信号编号从1到16,在Mach3中配置为低电平有效,端口号(Port Number)为2。
(3)爪手的控制。利用运动控制卡对主轴电机的控制功能来控制爪手的动作。用对主轴电机驱动的PWM信号来控制舵机,用舵机来直接控制爪手。一般脉宽在1~2ms,所以PWM信号频率500~1kHz。用主轴继电器通断(M3M5)控制舵机信号的通断。
4 效果
该六轴机器人相对于企业成熟的机器人,具有以下优势:价格低廉,能配备较多的实训工位;便于学生观察机器人的结构,深入体会其工作原理。
便于学生直接参与机器人的装配,通过对各关节机械传动的理解,为机器人的维修保养课程打基础;开源软件能让学生深入理解、编写控制程序;取材容易,结构简单,易于操作,性能稳定,安全可靠。当然,与企业成熟的机器人相比,它的功能相对简单。
[1]仲晓帆.基于CODESYS 的六关节机器人运动控制方法研究[D].浙江工业大学,2015.
[2]范叔炬.机械臂运动学算法设计[D].浙江大学,2008.
[3]王才东.六自由度教学机器人控制系统设计及实验研究[D].哈尔滨工业大学,2008.
[4]张涛.机器人引论[M].机械工业出版社,2010.
[5]黄政杰.六自由度FOXBOT机械手臂动力学之探讨[D].国立勤益科技大学,2011.
