滑模控制船舶动力定位控制系统研究
2018-03-27关克平张新放
关克平,张新放
(上海海事大学 商船学院,上海 201306)
0 引 言
随着海洋经济的快速发展,人类对海洋的探索越来越重视,而深海环境的复杂多变,使得作业的船舶或平台需要更高的定位精度,传统的作业工具由于其自身的局限性,如锚泊操作复杂、机动性能差等缺点,已经不能满足现代定位精度的要求,因此,具有智能控制的动力定位系统应运而生[1]。
动力定位系统(Dynamic Positioning System,DPS)是指在不借助外界的辅助下,依靠自身的动力装置来对船舶进行定位的控制系统;主要有测量系统、控制系统和推进系统3部分组成,其中控制系统是核心[2],其工作原理如图1所示。
工作原理为:DPS根据测量系统获得的船舶运动信息及当前环境参数,将船舶当前的位置和首向与设定值比较,经过信号处理剔除噪声、船舶干扰信号;控制器根据得到的偏差和控制算法计算出所需推力;船舶的推进器形成一个足以抵消外界环境干扰的主动力和转矩,最终使船舶保持目标位置或设定的航迹[3]。
本文在前人研究的基础上,对动力定位船舶的控制系统进行研究,采用滑模变结构控制(Sliding Model Control,SMC)方法设计一种新型的控制器,使其具有较好的控制效果,具有更好的稳定性和鲁棒性。
1 船舶动力定位系统的数学模型
船舶在海上的运动极其复杂,包括横摇(Rolling)、纵摇(Pitching)、首摇(Yawing)、横荡(Swaying)、纵荡(Surging)和垂荡(Heaving)六自由度的运动[4]。本文为了简化船舶运动的数学模型,只考虑水平面上横荡、纵荡和首摇三自由度的运动。

图1 船舶动力定位系统框图Fig.1 Block diagram of DPS
1.1 建立坐标系
首先建立坐标系,包括大地坐标系EON和随船坐标系XOY,如图2所示,船舶的位置和首向的矢量式为,船舶的速度矢量式为

图2 大地坐标系和随船坐标系Fig.2 Earth-fixed frame and body frame
2种坐标系的转换关系为[5]:

式中,转换矩阵:

1.2 船舶运动的数学模型
船舶运动包括低频运动和高频运动,高频运动仅表现为周期性的振荡而不会引起平均位置的改变,一般从测得的综合信息分离出低频信号加以控制,而不对高频信号进行控制;为便于描述船舶运动,本文假设船舶质量分布均匀、左右对称且视为刚体,忽略海洋环境的高频干扰,只考虑风、流、浪等引起的低频干扰,得到经简化的三自由度船舶低频运动的数学模型[6]:


式中:m为船舶质量,IZ为船舶转动惯量;,。为船舶在纵荡,横荡,首摇方向上产生的附加质量;Xu,Yv,Nr为船舶在三自由度方向上的线性阻尼系数[7]。
2 船舶动力定位系统滑模控制器的设计
传统的DPS控制器很难满足现代船舶定位精度的要求,故要采用更加适宜的控制方法来设计控制器。滑模变结构控制理论的提出,对解决系统的不确定性问题具有很强的鲁棒性,对非线性系统的控制具有良好的控制效果。滑模控制理论以其独特的优点,广泛应用于各类控制器的设计当中[8]。
2.1 滑模变结构控制理论
变结构控制是一类特殊的非线性控制,其非线性表现为控制的不连续性;其控制原理为,根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束;系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制;其优点是能够克服系统的不确定性,对干扰和未建模动态具有很强的鲁棒性,尤其是对非线性系统具有良好的控制效果;该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向平衡点滑动,而是在滑模面两侧来回穿梭,从而产生抖振[9]。
2.2 滑模变结构控制器的设计
本文采用双环滑模控制的方法来设计控制律,采用积分器来设计切换函数。外环控制是将船舶的实际位置和首向对期望值进行跟踪,并产生期望速度Vd传递给内环;内环控制是将船舶的实际速度V对期望速度Vd进行跟踪,由内环产生的实际速度V通过积分器转化为船舶的位置和首向η。其外环为位置和首向环,内环为速度环[10]。控制系统的框图如图3所示。
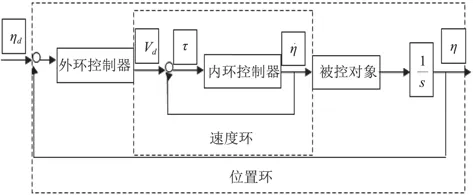
图3 双环滑模动力定位系统框图Fig.3 Block diagram of bicyclic SMC system
本文设计的控制目标:设计控制向量τc,使船舶的实际位置和首向η保持在期望的位置和首向ηd上。
设系统的位置和首向误差为e,定义:


对其求一阶导数得:

定义系统的外环滑模面so:

其中,对角矩阵Λ1特征值为正。
对式(7)求一阶导数得:

将式(3)、式(5)代入式(7)得:

定义期望值vd:

式中:ρ1>0,将vd代入式(8)得

定义系统的内环滑模面si:

其中,对角矩阵Λ2特征值为正。
对式(12)求一阶导数得:

将式(3)、式(6)代入式(12)得:

得控制律τc:


其中ρ2>0。
则控制律τc:

2.3 稳定性分析
Lyapunov函数常作为判断系统稳定性的重要工具,本文用来判断所设计控制器的稳定性[11]。
对外环滑模面so,构造Lyapunov函数Vo:

对上式求一阶导数:

将式(11)代入式(19)得:


根据Lyapunov函数的稳定性理论可知,所设计的外环滑模的控制系统趋于稳定。
对内环滑模面si,构造Lyapunov函数Vi:

对上式求一阶导数:

将式(16)代入上式得:

根据Lyapunov函数的稳定性理论可知,所设计的内环滑模的控制系统趋于稳定[12]。
3 仿真试验
为了验证所设计的滑模变结构控制器的控制效果,采用的船舶模型为经简化的动力定位船舶三自由度模型,为了便于仿真,将式(3)进一步简化得:


本文以某动力定位船舶为对象进行仿真研究[13],该动力定位船舶的主要参数如表1所示。

表1 动力定位船舶的主要参数Tab.1 Main parameters of dynamic position ship
由计算出的惯性矩阵M,线性阻尼矩阵 D(υ),进一步计算出系数矩阵A和矩阵B:
从仿真结果来看,所设计的滑模变结构控制器表现出了良好的控制效果。由图4船舶位置和首向的变化曲线可知,所设计的控制律能使船舶位置和首向渐进稳定到期望值;由图5船舶速度的变化曲线可知,所设计的控制律能使船舶速度渐进稳定到目标值,并保持该状态;由图6控制律的变化曲线可知,所设计的控制律在经过一段时候,能趋于稳定状态,说明该控制律具有较好的控制效果。
4 结 语
本文基于动力定位船舶简化的三自由度数学模型,借助滑模变结构控制方法,设计一种滑模变结构控制的动力定位控制器,并对所设计的控制器进行了稳定性分析,最后借助某动力定位船舶作为仿真对象,通过Matlab编程对控制器进行仿真验证,结果表明,在有外界环境的干扰下,该控制器能较好地保持稳定性和鲁棒性,控制精度较高,对今后进行动力定位控制器的设计研究具有一定的参考意义。

图4 船舶位置和艏向的变化曲线Fig.4 Curve of ship positioning and heading
[1]赵志高, 杨建民, 王磊.动力定位系统发展状况及研究方法[J].海洋工程, 2002, 20(1): 91–97.
[2]史斌杰, 吴辙莹.动力定位系统的最新技术进展分析[J].上海造船, 2011, 87(3): 43–45.
[3]边信黔, 付明玉, 王元慧.船舶动力定位[M].科学出版社,2011, 5.
[4]童进军, 何黎明, 田作华.船舶动力定位系统的数学模型[J].船舶工程, 2002, 5: 27–29.
[5]LIN Yong-yi, DU Jia-lu, HU Xin, et al.Design of neural network observer for ship dynamic positioning system[C]//Proceedings of the 33rd Chinese Control Conference.2014.7:28-30.
[6]E A TANNURI, A C AGOSTINHO, H M MORISHITA, et al.Dynamic positioning systems: an experimental analysis of sliding mode control[J].EI Control Engineering Practice.2010(18) : 1121–1132.
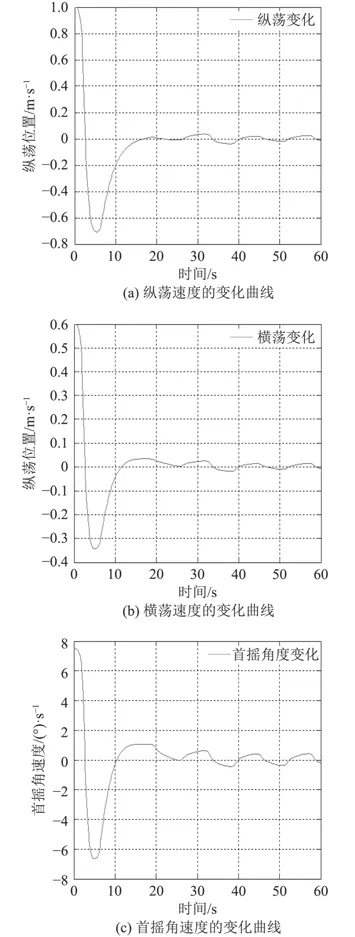
图5 船舶速度的变化曲线
Fig.5 Curve of ship speed
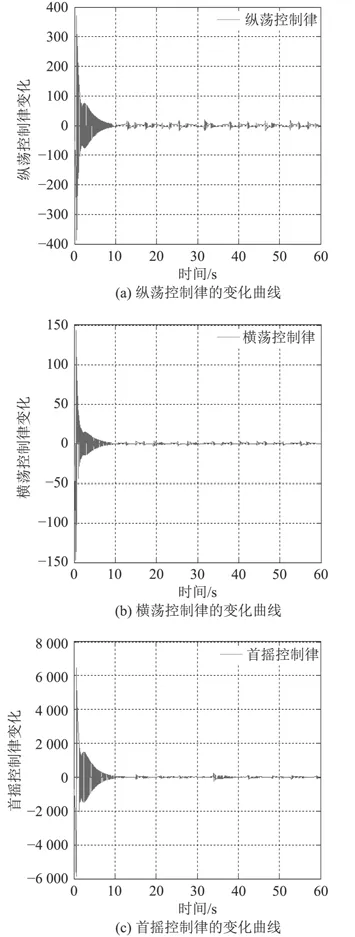
图6 控制律的变化曲线Fig.6 Curve of control law
[7]郭娟.不同海况条件下船舶动力定位混合控制系统设计[D].上海: 上海交通大学, 2012.
[8]王祝炯.滑模变结构控制系统设计研究[D].杭州: 浙江工业大学, 2003.
[9]刘金琨.滑模变结构控制MATLAB仿真[M].北京: 清华大学出版社, 2005.
[10]刘洋.船舶动力定位的智能控制及推力分配研究[D].大连:大连海事大学, 2013.
[11]罗利军, 李银山, 李彤.李雅普诺夫指数谱的研究与仿真[J].计算机仿真, 2005, 22(12): 285–288.
[12]YAN Ming, YI Jin-hui, LIU Yang, et al.Sliding mode control algorithm based on T-S fuzzy model for a class of nonlinear systems[C]// IEEE International Conference on Automation and Logistics Shenyang, China.2009, 8.
[13]T I FOSSEN, S I SAGATUN, A J SRENSRN.Identification of dynamically positioned ships [J].Journal Control Engineering Practice.1996, 4 (3): 369–376.
[14]刘胜.现代船舶控制工程[M].北京: 科学出版社, 2010:32–33.
[15]管自新, 温智宁.基于MATLAB常微分算子ode45的RLC电路状态轨迹的描绘[J].中国科技信息, 2008, 13:34–35.
