基于LabVIEW的力觉检测系统*
2018-03-26杨重骏黄金力朱璧合
杨重骏, 黄金力,薛 丽, 朱璧合, 谢 瑜
(1.厦门大学 公共卫生学院,福建 厦门 361102;2.厦门大学 航空航天学院,福建 厦门 361005)
0 引 言
虚拟手术机器人是一个新兴的、涉及多种学科的领域,包括机器人技术、生物组织建模、电机控制等,是当前国际上生物医疗器械领域的前沿课题[1~5]。应用力觉反馈技术,医务人员可以在搭建的虚拟手术操作平台上感受到如真实手术一样的触感,使手术训练更加准确和真实,进而迅速提高手术技能[6~8]。为了实现对手术操作的精确力反馈,需要对生物组织进行力学特性建模,精确穿刺模型可以帮助医生制定穿刺操作方案,设计机器人辅助手术控制单元,还可以为模拟手术训练设备奠定良好的基础[9~14]。
本文以穿刺操作为研究内容进行穿刺力建模,获得穿刺力与针的位移之间的关系,建立生物组织的力学模型,并研究了力与有关影响因素的关系。
1 系统总体结构设计
如图1所示,选用德国PI公司设计制造的直流电机(ML403.4DG-PWM)线性位移平台,由计算机通过单通道直流电机控制器C-863进行控制,并通过LabVIEW电机控制程序对电机实现速度、位移的控制。电阻式应变传感器固定于电机上、安装于针尾处,可以实时采集力信号,通过数据采集卡(NI ELVIS)模块化平台将其转换为电压信号并储存,最后通过由计算机程序输出。
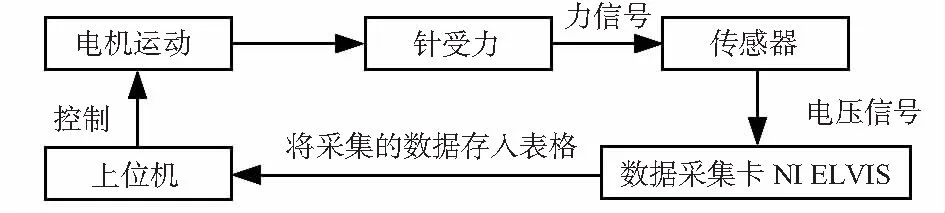
图1 穿刺力测量过程
2 系统软硬件设计
在总体结构设计的基础上,搭建完成了力觉检测系统,包括位移运动和力检测2个部分。电机与固定传感器的槽型结构通过螺钉连接,保证了传感器在实验测量中的稳定性。针固定在传感器上,在电机的带动下直线运动,模拟穿刺行为。直线运动的最小增量位移为0.2 μm,保证了穿刺过程中对位移控制的准确性和灵活性。随着针在生物组织中前进,受到的反馈力会被力传感器实时采集,并转换为电压信号传递给数据采集卡,最终通过计算机完成存储和输出。软件操作平台包括电机运动控制和力信号采集2个部分。在参数设置程序完成后,2个模块可以同时运行,即在针穿刺行为开始的瞬间即采集实时的穿刺力信号,消除了由运行开始时间的微小差别带来的后续数据处理过程的误差。两个模块在分别编程后,用一个While循环,可以在程序运行过程中不断处理各种事件,实现功能。
3 穿刺力测量与数据处理
对于猪肝穿刺力的测量,选用了点胶针头和不锈钢穿刺针进行实验,并分别观察了在2.5,2,1.5 mm/s 3种穿刺速度下的力曲线。在穿刺力实验中,选用6#,8#,12#和14#不锈钢穿刺针,穿刺速度为2.5 mm/s,穿刺过程如图2所示。将传感器输出的电压信号转换为力数据,即得到力随位移变化的信号,并以波形图为输出,由于原始的测量数据抖动很大,不便于进行深入分析讨论,需要对原始测量信号进行平滑处理,再对处理过的数据进行分析和建模。
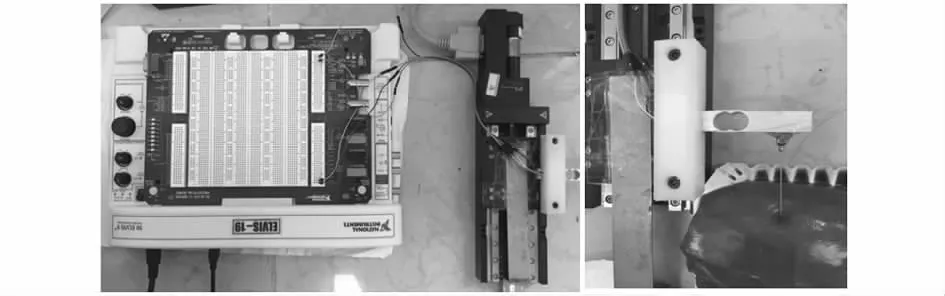
图2 针穿刺力觉检测系统与猪肝穿刺过程
由于采集的力信号受到很大的噪声干扰,因此,除了采集穿刺力的数据,又另外对环境参数进行了检测,即电机携带穿刺针做直线运动而不进行穿刺时采集信号。通过对原始信号和噪声信号进行快速傅立叶变换(fast Fourier transform,FFT),可以看出,噪声信号分布较为广泛,但相较于原始信号,干扰频率主要为高频分量。通过对信号的频谱分析可知,需要滤除原始信号中的高频分量,达到还原数据真实性和可靠性的目的。据此,设计了巴特沃斯低通滤波器,其特点是在通带内的频率响应曲线可以实现最大程度的平坦,而在阻带的曲线则能够逐渐下降为零。巴特沃斯滤波器的幅度平方函数可由式(1)表示
(1)
式中N为滤波器阶数;ω为频率;ωc为3 dB的截止频率。阶数N的大小主要影响通带幅频特性的平坦程度和过渡带、阻带的幅度下降速度。
4 实验结果与数据分析
以图3(a)中力的突降为标志,可以明显看出,针刺破组织背膜的过程,实心点之后穿刺力发生了锐减,由2.24 N降至0.77 N。随后,针刺入组织,受力不断增大。图3均为在2.5 mm/s的运动速度下的波形,差别在于点胶针的直径不同,按照图片的排列顺序,从上至下点胶针的直径依次减小,外径分别为2.1,0.52,0.42 mm,对应地可以看出:刺破猪肝时的力依次为2.24,0.89,0.75 N,其中橄榄色针头与橘色针头外径相差1.6 mm,穿刺力相差1.35 N,而由于橘色针和红色针的外径只相差0.1 mm,因此,这两种针头穿刺力的比较并不十分明显,仅相差0.14 N。除此之外,穿刺力—位移曲线趋势大致相同。
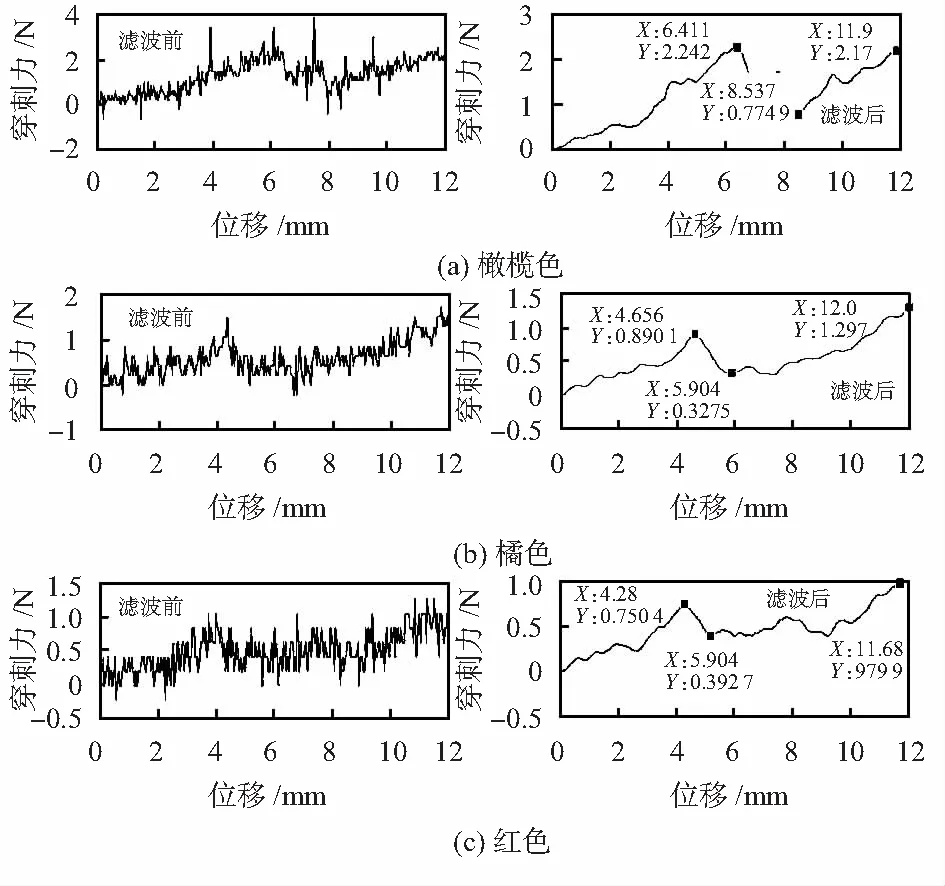
图3 滤波前后不同点胶针的穿刺力
针穿刺入组织后,其受到的摩擦力大小与穿刺针和组织间的相对速度有关,因此,对同一针头在不同速度下的穿刺力进行测量和比较,可以发现,随着速度的减小,针刺入后所受穿刺力减小,选取的速度由上至下依次为1,1.5,2.5 mm/s,针在组织中受力的峰值分别为1.7,1.9,3.7 N。波形如图4。

图4 在不同穿刺速度下14#穿刺针穿刺猪肝的力曲线
为了明确针穿刺力的变化趋势和特点是否同样适用于其他动物组织,另外对猪肉进行了同样的实验操作。从图5(a)中可以看出,针穿刺猪肉的力变化过程与穿刺猪肝的过程大体类似,即在位移10 mm左右的位置发生一次力的突降,表示表面膜刺破,此后,穿刺力不断攀升直至刺出组织后下降。而且穿刺力随着针直径的增加而增大。
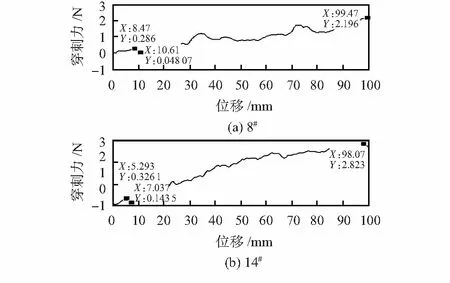
图5 不同型号穿刺针穿刺猪肉力曲线
虽然穿刺猪肉与穿刺猪肝的力—位移曲线从总体趋势看大致接近,但对比两种实验材料在同样直径的穿刺针以相同穿刺速度的穿刺力—位移曲线可以发现:针与猪肉间的相互作用力略小于猪肝,而且穿刺猪肉过程出现的力的突降点也少于猪肝。这是由于猪肉与猪肝的组织结构不同造成的。
5 穿刺力模型的建立与分析
用8#穿刺针在穿刺速度为2.5 mm/s的条件下进行多组实验,利用MATLAB的曲线拟合工具箱对处理后的数据进行曲线拟合,分别利用二次函数和指数函数拟合预穿刺时猪肝组织的力—位移曲线,整理实验结果,如表1所示。
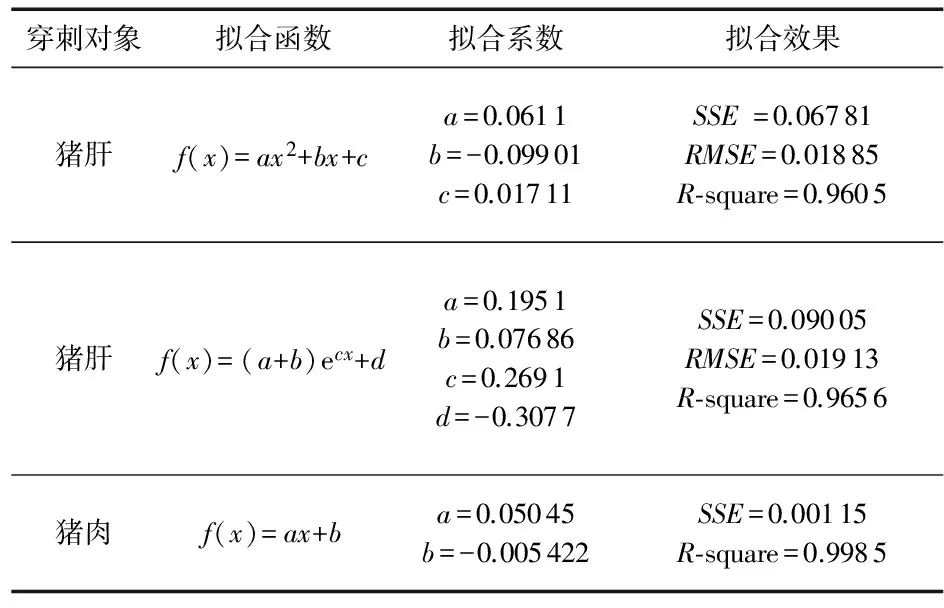
表1 8#穿刺针在穿刺速度为2.5 mm/s条件下穿刺力建模
其中,误差平方和SSE计算的是拟合数据和原始数据对应点的误差的平方和,SSE越接近于0,说明模型的选择和拟合越好,对数据的预测也越成功。均方根误差(root mean square error,RMSE)与SSE效果一样。确定系数R-square的正常取值范围为[0,1],越接近1,则说明该方程的变量对f(x)的解释能力越强,即该模型对数据拟合越好。通过比较穿刺猪肝的二次函数和幂函数两种模型发现,两种拟合方法的准确度相差较小,均可以作为穿刺猪肝时弹性力的拟合模型。而在准确度相差较小的条件下,从控制的角度来讲,二次函数更利于实现控制。
对于猪肉穿刺力建模时,由于选用不带皮的猪肉,因此,其纤维组织直接裸露在外面而且较为细软,穿刺过程中的变形较猪肝要小一些,故可认为是线弹性,利用一次方程进行建模。
由前述的数据分析可知,针的直径对穿刺力的大小有直接的影响,拟合得到的模型为
f(x)=0.873 7x+0.408 8
(2)
SSE为0.001 373,RMSE为0.030 75,确定系数为0.999。穿刺力与直径的线性变化关系,如图6(a)所示。
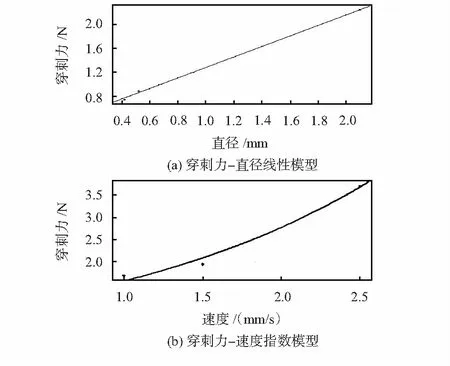
图6 穿刺力与直径及速度关系
除了直径对穿刺力的影响,对于破膜后的穿刺力来说,不同的速度对穿刺力的影响也比较明显,这是由于生物组织内部的粘弹性导致的,表现为穿刺速度对针轴的摩擦力产生影响。可以得到穿刺力随速度变化的指数增长模型
f(x)=aebx
(3)
图6(b)所示为穿刺力峰值随速度变化的拟合模型,模型系数为a=0.090 64,b=0.560 4。拟合效果SSE为0.033 92,R-square为0.971 3,可见该模型可以比较准确地拟合穿刺力与速度的关系。鉴于所选电机的直线运动最大速度为2.5 mm/s,因此,对于更高速度下的穿刺力变化是否符合该指数模型还需要进一步地研究。
6 结 论
1)在穿刺的变形阶段,穿刺力主要由弹性力组成,即由于组织发生弹性形变而产生对针头的阻力。在穿刺阶段,穿刺力由摩擦力和剪切力构成,摩擦力与速度相关。
2)对变形阶段的弹性力建模可以根据组织形变的大小而选择不同的模型,在较小形变时,弹性力可认为是穿刺位移的一次函数;当发生较大形变时,弹性力不再呈线性变化,与位移的关系可视为二次函数或是指数函数。
3)穿刺针的直径对穿刺力有影响,表现为穿刺力随直径的增大而线性增大。
4)速度对穿刺力的影响表现在穿刺阶段,穿刺力随速度呈现指数型增长。
致谢:
感谢福建省传感技术重点实验室和厦门市传感器技术重点实验室经费的支持。
[1] 付玉锦,原 魁,杜清秀,等.基于手术刀的虚拟外科手术系统的设计[J].中国体视学与图像分析,2005,10(2):94-98.
[2] 郭柏录.主从异构手术机器人误差匹配性研究[D].天津:天津大学,2009.
[3] 汤旭日.心脑血管微创手术辅助装置的研究[D].哈尔滨:哈尔滨工程大学,2009.
[4] 宋卫国,原 魁.用于触觉建模的生物组织切割特征多参量采集[J].系统仿真学报,2006,18(1):204-206.
[5] 陈孝凯,徐晶晶,曾庆军.生物软组织力反馈触觉建模测试系统研制[J].传感器与微系统,2009,28(4):76-78.
[6] 胡中伟,张 璧.生物软组织切割过程建模[J].中国机械工程,2011(17):2043-2047.
[7] 尹 航.柔性针软组织穿刺相互作用建模与仿真研究[D].北京:北京交通大学,2013.
[8] Okamura A M,Simone C,O’Leary M D.Force modeling for needle insertion into soft tissue[J].IEEE Transactions on Biomedical Engineering 2004,51(10):1707.
[9] Maurin B,Barbe L,Bayle B,et al.In vivo study of forces during needle insertions[C]∥Perspective in Image-Guided Surgery,2004:415-422.
[10] 宿志亮.柔性针穿刺软组织的力学建模及变形测量[D].天津:天津大学,2013.
[11] 赵新刚,杨唐文,韩建达,等.机器人辅助针穿刺技术[J].科学通报,2013,58(S2):20-27.
[12] 曾小兰.基于虚拟裂纹扩展组织针穿刺的有限元仿真及分析[D].杭州:浙江大学,2013.
[13] Misra S,Reed K B,Schafer B W,et al.Mechanics of flexible needles robotically steered through soft tissue[J].International Journal of Robotics Research,2010,29(13):1640-1660.
[14] Majewicz A,Marra S P,van Vledder M G,et al.Behavior of tip-steerable needles in ex vivo and in vivo tissue[J].IEEE Transactions on Biomedical Engineering,2012,59(10):2705-2715.
