一种电磁感应式位移传感器设计*
2018-03-26田旭峰董全林郭景昊
田旭峰, 董全林, 郭景昊
(1.微纳测控与低维物理教育部重点实验室,北京 100191;2.北京航空航天大学 仪器科学与光电工程学院,北京 100191)
0 引 言
位移传感器用于测量相对位置,又称线性传感器[1]。位移测量技术广泛应用于工业生产和过程控制等领域。最常使用的伺服反馈位移传感器有电位计式位移传感器,差动变压器式位移传感器、光电式位移传感器等[2]。电位计式位移传感器[3]由于其接触式测量的原因,导致其具有易磨损、易氧化、易老化、机械使用寿命短、分辨力和可靠性低等缺点。差动变压器式位移传感器[4]实现了非接触式测量,但是由于其测量特点,导致了其线性区小,结构尺寸较大,因此,在空间受限时很难发挥优势。而光电式位移传感器[5,6]虽然能实现高精度测量,但易受油污、粉尘等环境条件的影响,且生产、维护成本较高。
本文在智能阀门定位控制系统中,设计了一种新的电磁感应式位移传感器,其精度较高,抗干扰能力强,生产维护成本低,能够满足阀门定位控制系统各项指标要求。
1 工作原理与各模块设计
根据法拉第电磁感应定律设计,以天线与谐振器电磁感应技术为基础。其简化系统框图如图1所示,由激励信号发生单元产生激励信号,施加到发射线圈上,发射线圈周围会产生变化的磁场,谐振器在该磁场中运动,由于涡流效应[7]产生减弱原磁场的磁场,该磁场随着谐振器的位置变化而变化,因此,在感应线圈中会产生相应的电信号,建立谐振器位置和感应信号的关系。经过信号处理单元进行处理,输入到微处理器单元,即可解算出位移信息。
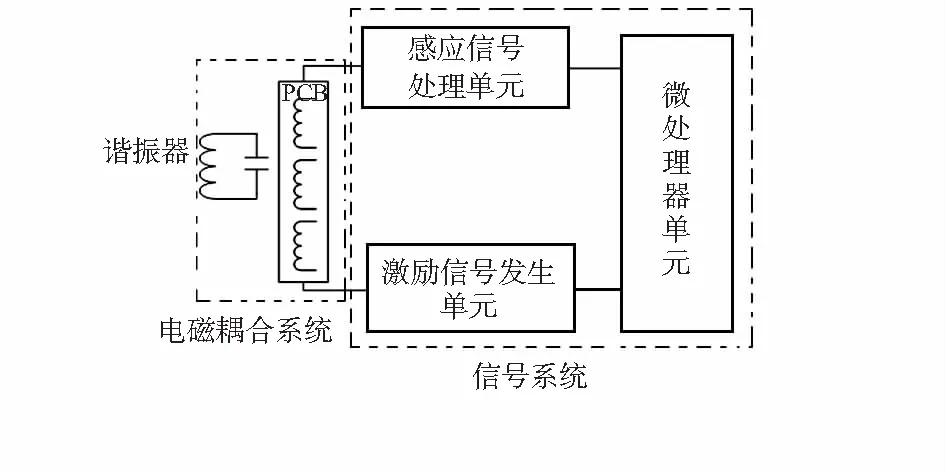
图1 电磁感应位移传感器结构
1.1 电磁耦合线圈设计
电磁耦合线圈为该传感器的敏感元件,其结构如图2所示。其由固定部件和可移动部件2部分组成。固定部件上包含三组线圈,分别为:正弦激励线圈,余弦激励线圈和感应线圈。可移动部件为LC谐振电路。
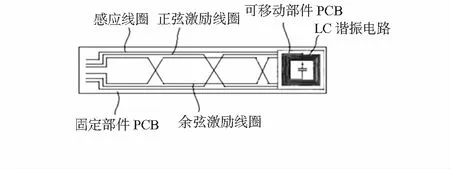
图2 电磁耦合线圈结构
各线圈形状如图3所示。正弦激励线圈形成2个大小相等方向相反的电流环,传感器施加在正弦激励线圈上的电流表达式为
I(t)=Asin(2πf1t)cos(2πf0t)
(1)
式中f1为调制频率,为3.9 kHz;f0为载波频率,为2 MHz;A为常数。
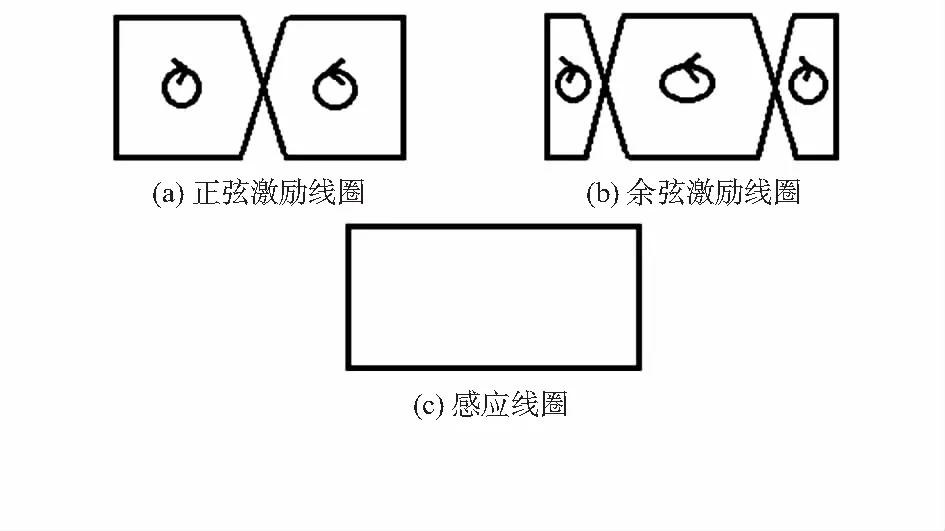
图3 线圈形状
此时在线圈轴线上形成的磁场表达式为
Bsin=K1sin(2πf1t)cos(2πf0t)sin(2πx/L)
(2)
式中K1为常数;x为沿线圈轴线的位置;L为整个线圈轴线长度。
当无谐振器作用时,由于正弦激励线圈的2个电流环大小相等,方向相反,产生的磁场相互抵消,所以,感应线圈中无感应电信号。
余弦激励线圈中形成3个电流环,2个小环与大环的方向相反,大小相等。施加在余弦线圈上的电流表达式为
Q(t)=Acos(2πf1t)cos(2πf0t)
(3)
同理,可得其在轴线上的磁场分布为
Bcos=K2cos(2πf1t)cos(2πf0t)cos(2πx/L)
(4)
无谐振器作用时,余弦激励线圈同样不会在感应线圈中产生感应电信号。
当存在谐振器作用时,谐振器会在正余弦激励线圈产生的磁场中产生涡流效应,减弱原磁场的作用。此时,原有的平衡被破坏,感应线圈中产生随谐振器位置变化而变化的感应电信号,经推导,该电信号的表达式为
EMF=K3cos(2πf0t)cos(2πf1t-2πx/L)
(5)
因此,检测出该信号的包络波形相位值,即可将其转换为对应时刻的位置值。
1.2 激励信号发生单元设计
激励信号发生单元主要用于产生振幅调制的线圈激励信号,具体电路如图4所示。其中,U1为2个D触发器,选用芯片SN54AHC74,实现移相与分频。由单片机编程产生频率为4 MHz的方波,将该方波输入U1,经过移相分频得到频率为2 MHz的I,-I和Q三个脉冲信号。其中,Q与I相位相差90°,Q用于数字载波信号,对单片机产生的正余弦脉宽调制信号进行调制,即图4中的SIN和COS。经过与门后,将脉宽调制信号与数字载波信号进行混频,得到数字调制的正余弦激励信号,再分别将其输入到半桥驱动芯片U2A和U2B,选用AAT4900芯片,最后通过LC滤波得到模拟的振幅调制激励信号,即式(1)和式(3)所示的信号,将其分别施加到正弦线圈和余弦线圈上即可产生期望的电磁场分布。
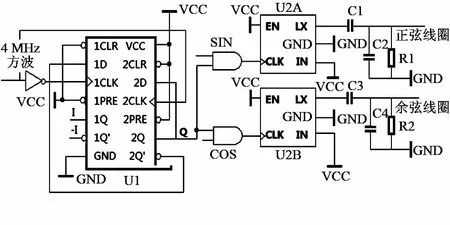
图4 激励信号发生单元电路
1.3 感应信号处理单元设计
感应信号处理单元主要用于对感应信号进行解调滤波,以及在不丢失相位信息的前提下进行模/数转换,将其转换为便于单片机处理的脉冲信号,其具体电路如图5所示。其中,S(x)为电磁线圈耦合系统输出的感应信号,GNDB为设置的参考地电压,为2.5 V。首先,将感应信号S(x)输入到一个高通滤波器,主要为滤除50~60 Hz的工频干扰。然后,将其通过由4个模拟开关组成的交叉模拟开关同步检波电路,其开关信号为之前在激励信号发生电路中产生的同相信号I和方向信号-I,其频率为2 MHz。选用MC74HC4066A芯片,其内部集成了4个能满足快速通断的模拟开关,很好地满足本电路的要求。在同步检波完成之后,将信号输入到由U3组成的低通滤波器,滤除同步检波后信号中的高频成分。再将其通过由U4组成的带通滤波器,滤除掉低频分量和直流分量,可成功提取出感应信号的包络波形,此外,还需要对其进行模/数转换,将该信号通过U5构成了一个过零比较器,即可实现模/数转换。为了提高相位检测精度,再将该信号与感应信号发生单元产生的正交信号Q进行混频,即可得到可供单片机处理。
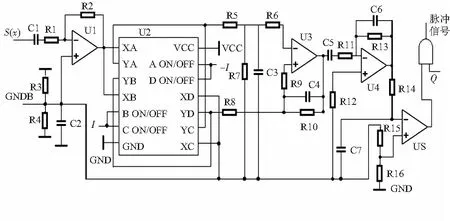
图5 感应信号处理单元电路
1.4 微处理器单元设计
选用PIC系列单片机作为微处理器单元,该系列单片机具有功耗低,成本低,稳定性好等优点[8],很好地满足了系统的要求。芯片用于输出4 MHz的方波,以及3.9 kHz的正余弦脉宽调制信号,同时对经过处理的感应信号进行计数,提取出其中的相位信息,通过相应的解算将该相位信息转换为相应的位置信息。另外,还可以实现显示、通信等附加功能,实现传感器智能化。
2 实验与结果
根据相应电路模块的设计,制作了实验电路板,其中包括谐振器电路板、电磁耦合线圈电路板以及主要起信号处理作用的主板。将谐振器和电磁耦合线圈安装在一个2自由度高精密光机座上。当移动高精度光机座位移平台时,每移动一个位移值,分别读出光机座和位移传感器的位移值,两者的差值即为传感器的误差。通过测量,得到传感器的误差曲线如图6所示,位移误差在-0.06~0.04 mm范围内,精度较高。
3 结束语
设计了一种应用于智能阀门定位控制系统中伺服反馈位移传感器。从实验结果可以看出:传感器精度较高,同时其实现了非接触式测量,延长使用时间,大幅提高了工作可靠性。在实际应用中,具有较强的抗干扰能力,在恶劣环境下仍能正常工作,具有较强的工程实用性和较高的性价比。
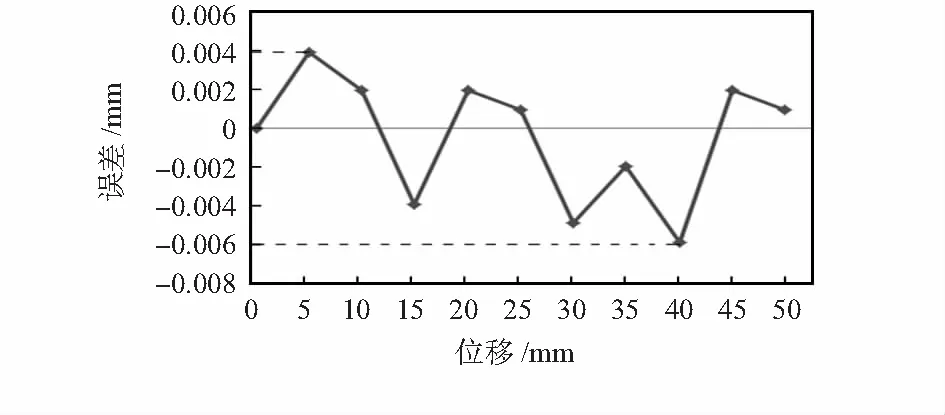
图6 传感器的误差曲线
[1] 昌学年,姚 毅,闫 玲.位移传感器的发展及研究[J].计量与测试技术,2009,36(9):42-44.
[2] 崔玉江,王 伟,杨 明,等.伺服反馈位移传感器的现状及发展趋势[J].宇航计测技术,2012,32(4):65-68.
[3] 郭华玲,孟立凡,冯 伟.电位计式角位移传感器测试系统的动态性能研究[J].陕西科技大学学报,2010,28(6):87-89.
[4] 杨朝英,徐龙祥.磁轴承系统中差动变压器式位移传感器的研究[J].传感器技术,2005,24(9):8-12.
[5] 石庚辰.新型光电式微位移传感器[J].传感器技术,1998,17(2):38-39.
[6] 苏 珊,侯钰龙,刘文怡,等.光纤位移传感器综述[J].传感器与微系统,2015,34(10):1-3.
[7] 王春兰,张 钢,董鲁宁,等.电涡流传感器的有限元仿真分析与研究[J].传感器与微系统,2006,25(2):41-46.
[8] 任志平,李 貅,党 博.基于PIC单片机的找水系统设计[J].传感器与微系统,2016,35(10):73-75.
