一种井下铲运机无线遥控系统
2018-03-23王亚东田立勇谢广峰
王亚东 田立勇 李 胜 谢广峰
(1.河北钢铁集团矿山设计有限公司 河北 滦县 063700;2.河北钢铁集团矿业有限公司石人沟铁矿,河北 遵化 064200)
生产安全历来受到人们的关注,并且随着经济技术的发展,更加受到人们的重视,与此同时提高生产安全的技术也获得了广泛的发展。井下铲运机无线遥控系统就是随着通信技术的发展应运而生。井下采矿历来是危险程度较高的作业,尤其是进入矿房铲取矿石的过程。在铲取矿石的过程中,爆破后的矿石会产生移动,而矿石的移动则对于铲运机及其驾驶员产生极大的安全威胁。如果采用遥控系统控制铲运机,操作人员可以不用随铲运机进入矿房,在矿房外面操作铲运机即可完成铲料作业。使操作人员远离危险区域,这无疑在很大程度上保证了操作人员的安全。遥控操作系统属于视距内作业,铲运机改造起来相对简单,无需建设网络系统,没有网络延迟,实时性好,工作可靠,投入低见效快。可以显著地提高安全效益,并可以在一定程度上提高经济效益。
1 硬件部分
遥控操作系统主要由2部分组成:其一为遥控器,负责发送控制命令,显示车辆及遥控器的状态信息。其二为车载控制器,负责接收遥控器及车载手柄、按钮发出的命令,并将接收到的命令进行解析,实现对车辆的控制。同时其兼具车辆状态的监督及连锁保护,防止错误的操作对车辆造成损害。
1.1 遥控器
遥控器主要由以下几部分组成:①操作部分,包括操作手柄、按钮、换挡开关、拨动开关;②显示报警部分,包括1个OLED显示模块及1个蜂鸣器;③无线收发部分,包括1个无线收发模块及其天线;④电源部分,包括电池、DC-DC电源模块、电压模拟量输出部分;⑤核心控制部分,包括1个核心控制板。
结构框图如图1所示。
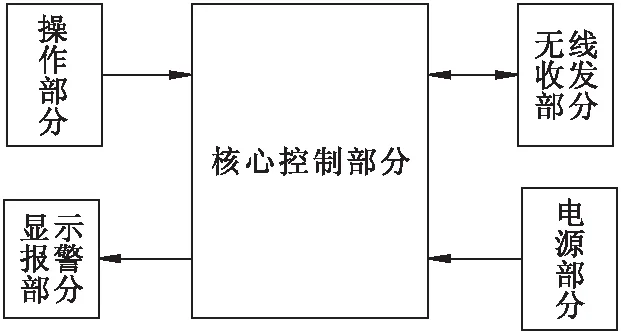
图1 遥控器结构框图
数字量的输入主要集中在操作部分,其中的按钮、拨动开关等部件采用按键扫描程序读取其开关状态。模拟量的输入主要为操作手柄及电源电压的输出,电压输出范围0~3.3 V。模拟量的输入采用AD转换器进行扫描读取。核心控制器与无线收发模块的数据交换是通过串口实现的,数据的收发采用DMA控制器控制,提高了数据收发的可靠度并减轻了CPU的工作量。电源部分负责为其余部分提供合适的工作电压。
1.2 车载控制器
车载控制器主要由以下部分组成:①IO部分,主要包括传感器、车载控制手柄、电子油门、开关等数字模拟量输入及电磁阀、变矩器、灯、喇叭等的控制输出。② CAN通信接口,CAN通信接口作为预留端口,可以与其他CAN通信设备通信实现功能的拓展。③无线收发部分,包括无线收发模块及其配套天线。④电源部分,主要包括DC-DC电源模块、电压模拟量输出,电池采用原车自带的蓄电池。⑤核心控制部分,系为ARM处理器的最小核心系统。结构框图如图2所示。
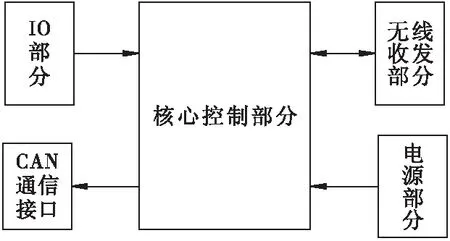
图2 车载控制器结构框图
IO部分是车载控制器与铲运机交互的信息接口。负责采集机油压力、机油温度、缸盖温度、蓄电池电压、发电机工作状态、皮带断裂、回油堵塞、蓄能器压力等信息,控制转向、铲斗装卸料、铲臂升降、熄火、刹车、驻车等电磁阀及喇叭、灯、油门等设备的动作。IO部分同样可以采集车载控制手柄、电子油门、开关按钮等信息,使得铲运机不光能够实现遥控控制,也可以本地操作。IO部分是整个系统非常重要的部分。控制核心一方面根据传感器采集到的车辆状态信息、通信状态信息,产生相应的标志位。另一方面接收控制命令,解析命令,并与车辆控制策略及车辆状态对比产生正确的输出。
2 软件部分
2.1 遥控器
遥控器主程序的工作流程如图3所示。

图3 遥控器主程序流程
图3中初始化程序实现GPIO、DMA、USART、SPI等端口功能的配置,自检程序主要检查手柄的位置是否处于中间的位置,如果不是则停止运行并发出警告。OLED程序实现各种状态数据的OLED显示。按键扫描程序扫描按键的开合状态并消除抖动的干扰。
图4中有2个中断子程序:DMA1-ADC1通道中断子程序和DMA1-USART2发送通道中断子程序。DMA1-ADC1通道中断子程序是在ADC1扫描端口、完成ADC转换、DMA控制数据存储并且存储的数据个数达到设定值后,DMA- ADC1触发数据传输完成中断,清除中断标志位。在判断自检结束的前提下,DMA1-ADC1通道中断子程序启动开启DMA1-USART2发送通道发送数据。DMA1-USART2通道发送完毕后触发发送完毕的中断关闭DMA1-USART2发送通道。如果没有关闭的这一个过程,数据将不停地发送。这2个中断子程序相互配合完成了模拟量数据采集,控制命令的发送。

图4 DMA中断程序
图5中DMA1-USART2发送通道开启USART2空闲中断子程序的作用主要有2方面:一是在DMA-USART接收通道接收的数据完整时对整帧进行CRC校验,以判断接收的数据是否正确,正确后即可使用;二是在DMA-USART接收通道接收的数据不完整时,重置DMA-USART接收通道的计数器,以确保下一帧数据能够正常接收,这是一个自我纠正的程序。
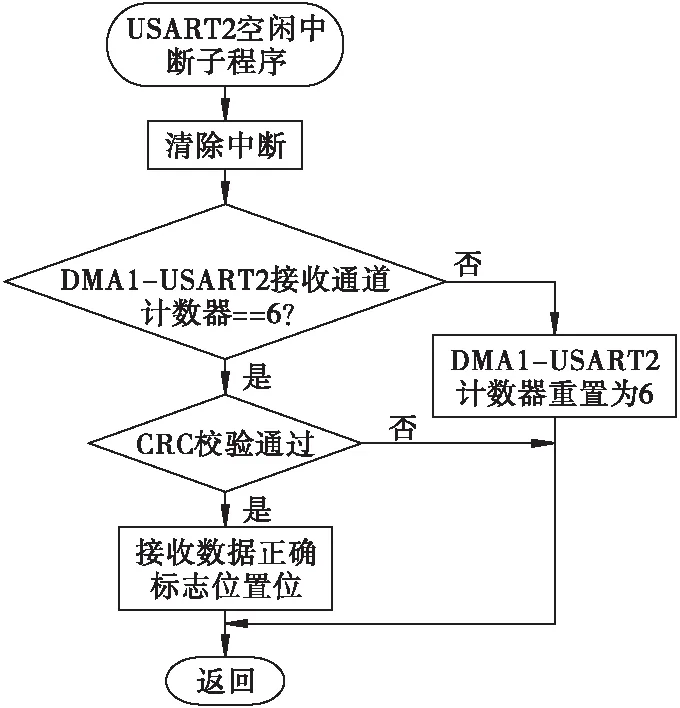
图5 USART2 空闲中断子程序
2.2 车载控制器
图6是车载控制器的主要程序流程图。
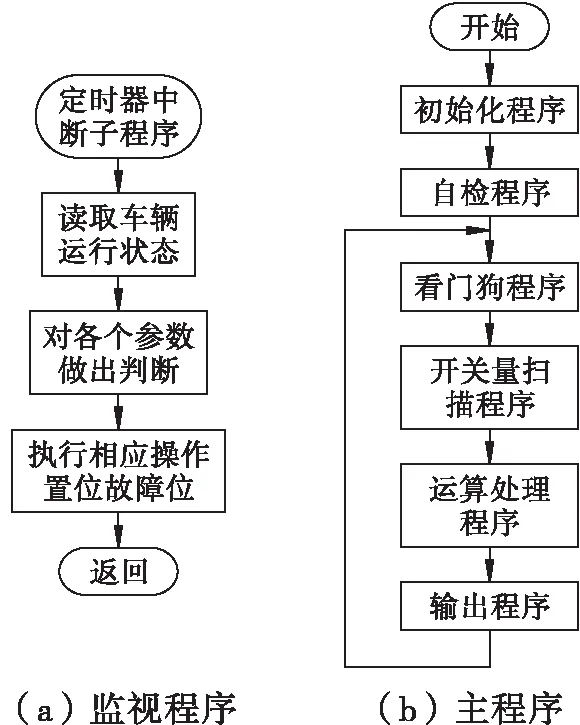
图6 车载控制器主要程序流程
定时器中断子程序作为一个监视程序,独立于主程序。当出现故障状态时在规定的时间处理完毕。运算处理程序把接收到的控制信息,依据控制策略、车辆状态、输出形式转换成所需的数据,统一放到输出缓存器中,最后由输出程序进行统一输出。
车载控制器同样具有遥控器中所列的中断程序,以便完成模拟量采集、通信数据帧的收发等功能。
3 系统应用
该系统先应用于井下铲运机,由于我们改造的铲运机本身是机械操控的,所以需要对其进行电控系统改造,将机械控制的阀门改造成电磁控制的阀门,并根据需要增加一些传感器,如转速传感器,轴编码器等。车载控制器采集车辆传感器的信息,依据传感器的状态及遥控器信息或车载控制手柄的信息控制车辆的运行。车辆有2种运行模式,一是遥控模式,在视距范围内通过在车外操纵遥控器来控制车辆作业;二是本地控制模式,人在车内通过车上的控制手柄来控制车辆的运行。遥控模式适合铲运机进入危险程度高的处所作业,如矿房内,当车辆退出危险处所后,操作人员上车作业。这样既保证了人员的安全,也保证了操控的灵活高效。
对于更加先进的电控系统铲运机,可以将输出控制、信息采集与原有系统进行并联,遥控作业采用本遥控系统,本地作业可采用原有的操控系统,改造的工作量会更小一些。
4 结 论
该遥控系统在实际运行中,工作稳定可靠,有效实现了对铲运机的控制。在矿房外操控铲运机进入矿房铲取矿石,运至矿房外面;切换到本地操作,驾驶车辆行进至溜井卸料处,将矿石卸入溜井之中,再驾驶回到矿房外,依次循环往复。该系统改造投入小、见效快、建设周期短,对于复杂的地下环境尤为适合,可以在最大程度上保障人身安全的前提下,提高作业的效率。
[1] 杜春雷.ARM体系结构与编程[M].北京:清华大学出版社,2003.
Du Chunlei.ARM Architecture and Programming[M].Beijing:Tsinghua University Press,2003.
[2] 宋 岩,译.Cortex-M3权威指南[M].北京:北京航空航天大学出版社,2009.
Song Yan translation.Cortex-M3 Authoritative Guide[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2009.
[3] 蒙博宇.STM32自学笔记[M].北京:北京航空航天大学出版社,2012.
Meng Boyu.STM32 Self-study Notes[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2012.
[4] 冯新宇.ARM Cortex-M3体系结构与编程[M].2版.北京:清华大学出版社,2017.
Feng Xinyu.ARM Cortex-M3 Architecture and Programming[M].2nd Edit.Beijing:Tsinghua University Press,2017.
[5] 黄志凌.一种装载机的无线遥控系统设计[J].机电工程,2011,28(2):235-242.
Huang Zhiling.Design of wireless remote control system in loaders[J].Journal of Mechanical & Electrical Engineering,2011,28(2):235-242.
[6] 何 宏.基于单片机的工业无线遥控系统[J].化工自动化及仪表,2016(5):513-516.
He Hong.Industrial remote control system based on MCU[J].Control and Instruments in Chemical Industry,2016(5):513-516.
[7] 李 枳.无线遥控地下铲运机的发展及液压系统的改进[J].冶金设备,2008(2):54-57.
Li Zhi.Reform on hydraulic system and development of radio remote controlled LHD[J].Metallurgical Equipment,2008(2):54-57.
[8] 杨 超.基于CAN总线的地下铲运机遥控系统的研究[J].矿山机械,2011,39(3):30-32.
Yang Chao.Research on remote control system for underground scrapers based on CAN bus[J].Mining & Processing Equipment,2011,39(3):30-32.