自升式平台升降系统同步控制策略研究
2018-03-23党存禄
党存禄 ,刘 静
(1.兰州理工大学 电气工程与信息工程学院,兰州 730050;2.甘肃省先进工业过程控制重点实验室,兰州730050;3.兰州理工大学 国家级电气与控制工程实验教学中心,兰州 730050)
海洋自升式平台是深海区域油气开发的主要设备,我国对海上石油勘探和开采起步较晚,技术相对国外比较薄弱。大部分关键设备都是进口的,尤其是自动控制系统和主要设备。因此开展这一领域关键理论和技术的研究,对提升我国竞争能力具有重大的经济和政治意义[1]。
由于自升式海洋平台在深水作业且重量大、起升高度高,单个电动机的功率很难驱动。在现代大功率、大惯性控制要求下,必须采用多电机联动来满足大功率需求。为了提高平台升降系统的跟踪精度和控制性能,必须保证多驱动电机的同步性能。事实上,由于传动轴的驱动特性、电机对物体的传输特性、负载的扰动等因素的影响,使多电机的同步性能产生恶化。因此,多电机同步控制成为平台升降系统研究的热点和难点。
1 升降系统同步控制研究
在正常升降过程的工况下,如果齿轮之间的负载是平衡的,升降齿轮将会以相同的负载量稳定地进行上升和下降。然而在实际中,例如平台电机单元的速度不同步,或倾斜等各种因素,都会使齿轮的负载不平衡。一般有2种状况:由于马达转速过快而导致的负载过大,以及由于马达转速过慢导致的负载过小,无论哪种状况,在平台升降过程中如果不进行调整,都将不可避免地导致平台事故。因此,电机协调同步升降控制效果将直接影响升降系统使用寿命及升降过程的安全性[2]。
1.1 机械同步方式
机械同步的控制方式,该系统由一台大功率的异步电机驱动传动轴,系统的机械传动轴的速度作为共同的给定信号,系统的驱动装置通过齿轮在主轴上啮合,当外部因素发生变化时,某个驱动单元也随之变化时,转矩信号被传送到机器的主轴上,这导致主轴的转速改变,由于主轴的旋转速度是给定的,这会使其余的驱动装置跟随主轴变化。这种控制方式容易实现,但它只采用一台大功率的电机来拖动整个系统,使单元的负载因电机容量的有限受到了限制,并且驱动单元是经过齿轮箱来与机械总轴进行啮合,因此增加了齿轮箱的加工和维修费用[2]。
1.2 并联控制同步方式
在并联控制系统中,各电机给定的转速信号相同,同步控制方法简单,易于实现。其系统结构如图1所示。
并联给定速度控制方式,从理论上讲,所有电机都使用相同的给定信号,电机在启停阶段的同步性能会更好。由于系统在运行过程中,每个电机都独立工作,任意2台电机之间没有耦合作用,当某台电机因为干扰而波动时,无法影响到其他电机,电机之间形成同步误差,所以这种控制方式只适用于系统无外界干扰、同步性能不高的场合。
1.3 主从控制同步方式
主从控制同步方式是指系统的给定速度作主电机的输入信号,从电机的输入速度信号是主电动机的输出速度。其控制结构如图2所示。

图2 主从控制结构Fig.2 Master-slave control structure diagram
该系统中某台电机,因为负载扰动等因素引起电机的速度波动只能影响到后面电机,系统的跟随性具有单向性。此外,每台电机的速度给定值并不是相同时间接收到,所以此控制方式在系统启停阶段时的同步效果不是很好。
1.4 误差耦合控制同步方式
误差耦合控制方式是通过对电机除了自身的转速度误差计算外,还对电机之间的运行速度偏差进行补偿,其控制结构如图3所示。
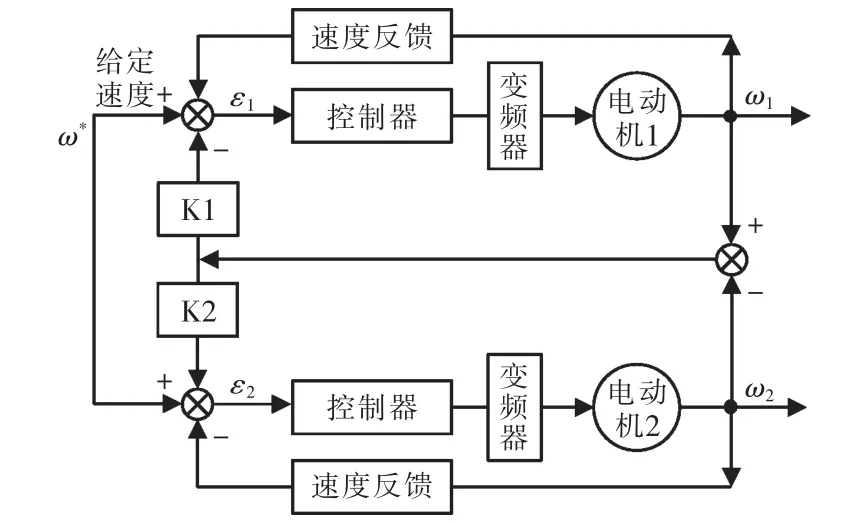
图3 误差耦合同步结构Fig.3 Deviation coupling synchronous control structure diagram
该控制方式没有主从之分,每个电机初始给定速度一致,在系统启停阶段不存在速度滞后问题,且每台电机都是相互关联的,当电动机受到外部干扰时,控制器根据每个电机的转速自动计算所需要的补偿量,然后对每台电动机进行补偿控制并作用于各电机,电机输出速度实时跟踪系统设定速度,具有较好的同步控制性能。
通过对比分析上述控制方案的优缺点,结合该系统的同步控制的特点,我们不难发现并联控制结构和主从控制结构达到的同步控制效果并不是很好,为了进一步提高同步控制系统的同步性能,本文采用基于偏差耦合的同步控制方法作为本系统的多电机同步控制方案。
2 基于偏差耦合的同步控制算法
2.1 基于相邻耦合误差的多电机同步控制算法
对于具有多台电机的同步系统,假定系统中各电机之间的速度关系为[3]ω1=ω2=ω3=…ωi=…ωn,并且定义第i台电机的跟踪误差:

式中:ωi(t)为第 i 台电机的输出速度;ω*(t)为第 i台电机的设定速度。
根据相邻交叉耦合控制思想,定义相邻电机的同步误差为
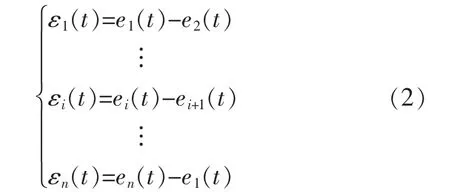
当系统启动或遭受外部干扰,在正常情况下多个电机系统将产生较大的同步误差时,只有当系统满足 εi(t)→0条件时,所有电机的同步误差收敛到零。根据上述误差的定义,控制器可以设计为使误差收敛趋于零,具体控制原理如图4所示。
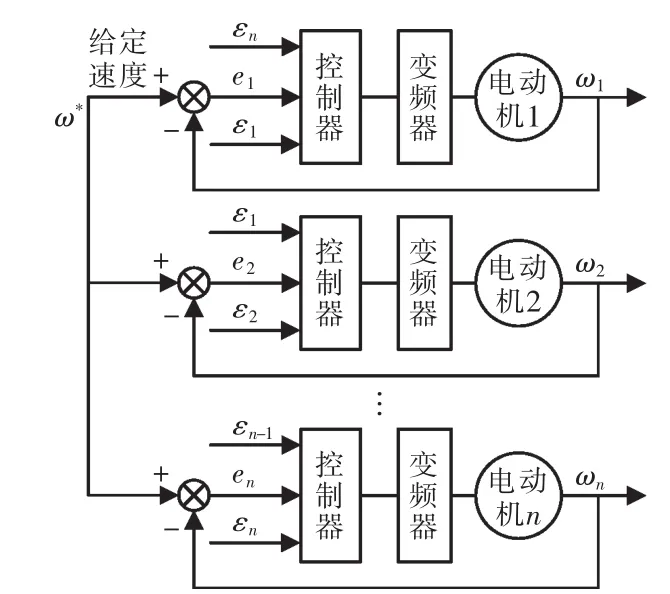
图4 相邻交叉耦合同步控制结构Fig.4 Adjacent cross-coupling synchronous control structure diagram
基于相邻交叉耦合误差的同步控制系统的优点是在启动和停止阶段的同步效果显然相当出色,不足之处是如果系统中有一台电机受到干扰,它纠正同步误差的方式是只能依靠相邻的电机逐个来影响其余的电机。
根据升降系统的控制特点,以及对比分析上述控制方案的优缺点,本文在相邻耦合误差控制算法基础上进行改进,提出了加权耦合误差控制算法。
2.2 基于加权交叉耦合的多电机同步控制算法
在实际控制系统中,桩腿会受到平台不同作用力,故对电机设定了不同的权重,承受作用力大的电机设置高权重,反之作用力小的设置低权重。当高权重的电动机被干扰时,系统中的大多数电动机可以一起工作,以获得更快的恢复速度;而当次要电机受到干扰时,只由少数电机来补偿扰动[4]。
同步误差ei*(t)定义为第i台电机与与其它电机之间的误差的加权求和:

式中:耦合系数p和q是正常数,p≠q。
式(3)可以很容易地重写为

在矩阵A上进行等价变换,我们可以得到如下
的上三角矩阵

可以明显地看到,当pn≠qn,A是一个满秩矩阵。因此,我们可以得出结论,Aε=E有唯一解。当满足 E=0n×1,有 ε=0n×1,故多电机同步误差渐近收敛到零。
系统中第i台电机的速度控制量为

式中:ui0(t)为第i台电机跟踪误差补偿器输出;(t)为第i台电机的两个同步误差补偿器输出。
通过改善相邻耦合同步控制方案,设定了每个电机之间的影响关系,针对不同权重的电机,采取了不同的控制参数。此方案既满足了多个电机之间的同步,也增加了电机主从控制关系,系统控制框图如图5所示。
图5 加权交叉耦合控制Fig.5 Weighted cross-coupling control diagram
3 仿真研究
根据平台升降控制系统搭建3台交流电机同步系统模型如图6、图7所示,基于加权相邻耦合控制策略进行Simulink仿真验证。针对同步效果进行了仿真实验,并且在2 s时添加负载转矩为80 N·M的扰动信号,加权相邻交叉耦合控制曲线如图8所示。

图6 Vector Control原理Fig.6 Vector Control schematic diagram

图7 加权交叉耦合仿真模型Fig.7 Weighted cross coupling simulation model

图8 电机控制仿真曲线Fig.8 Simulation curves of motor control
Simulink仿真表明,升降系统采用基于加权相邻耦合控制方法,在启动阶段速度能够快速跟随,不存在滞后问题,在出现干扰信号时,能够快速抑制干扰信号,具有很好的抗干扰能力。综上所述,基于加权相邻耦合控制具有很好的起动性能和抗扰动性能,能够较好地实现多电动机同步控制。
4 结语
通过对升降系统控制策略的研究分析,提出了相邻耦合控制方式,解决了自升式平台存在的多电机同步控制问题。并在此基础上进行了改进,提出了加权交叉耦合控制方法的多电机同步控方案。
基于Matlab对加权耦合控制同步算法进行仿真研究,仿真结果表明:基于加权相邻耦合同步控制方式具有更好的同步控制性能,更能满足系统的控制要求。
参考文献:
[1]齐继阳,王凌云,李金燕,等.海洋平台嵌入式升降控制系统的开发[J].机械设计与制造,2016(7):142-145.
[2]万双妮.自升式海洋平台升降系统监控方法及应用研究 [D].青岛:中国石油大学,2012.
[3]何新霞.自升式海洋钻井平台升降系统多电机同步控制研究[J].电气应用,2013(19):54-57.
[4]谷雨,马钺.基于加权交叉耦合的多电机同步控制研究[J].电气传动,2016,45(9):58-61.
