地空两用农业信息采集机器人设计研究
2018-03-21彭凤英
彭凤英
(重庆科创职业学院,重庆,402160)
0 引言
为了获取更为准确的农业生产信息,国内外针对农业信息的采集方式以及采集设施做出了各种研究。日本研制出了六足机器人,在其中搭载了二氧化碳传感器以及风向仪等来实现针对农业信息的有效采集。而美国有专家研发出了watching-dog robot,其中配备了摄像头以及GPS接收器,同时设置了联动悬架结构,从而对比较复杂的地形形成良好的适应。
1 地空两用农业信息采集机器人设计
1.1 机械结构设计
1.1.1 地面行走机构
对地空两用农业信息采集机器人的地面行走机构进行结构设计。
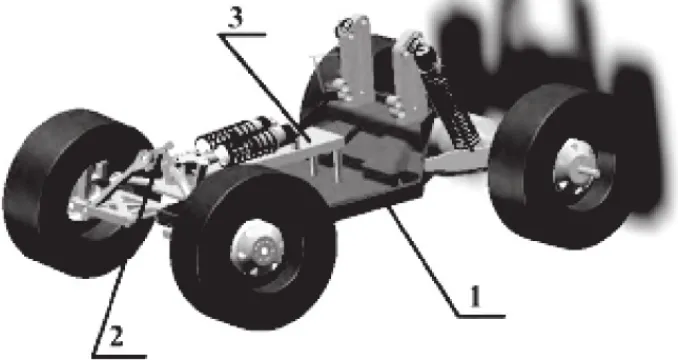
图1 整体结构图
这个结构主要利用到了独立式的悬架,让行走机构所呈现的减震性能得到明显提升,继而实现其越障能力的拓展。在地面行走机构当中,我们还设置了舵机控制系统,让机器人在运动过程中显得更加灵活。结合AT9遥控器实现对电极以及舵机的控制,让机器人能够自主行驶,从而更好的完成对信息进行采集的任务。而地面行走机构主要是结合中置马达的四轮驱动方法让机器人实现在地面的行走,而且在马达上配备了散热片,从而避免马达过热的情况出现。利用这样的设置方式能够有效提升机器人在地面行走过程中的灵活性以及越野性。
本次研究的机器人地面行走机构给实际应用形成了一定的支持,因为大多数设计方式所形成的农业信息采集机械在越野以及越障方面的能力都具有一定的欠缺,而该次研究所设计的行走机构正好可以对这个问题形成良好的解决。该设计方式所形成的行走结构不仅能够实现对飞行机构的有效搭载,还能够对那些由各种传感器所构成的地面信息采集车进行搭载,实现对地面农业信息的有效采集。
1.1.2 空中飞行机构
飞行机构的主要材料是碳素材料,它的特征主要在于重量比较轻,而且强度较大。而空中飞行机构的中心板设置实现了对控制系统以及信息采集系统的有效搭载。利用空中飞行机构能够让机器人整体实现对空中信息的有效采集。
1.2 飞控系统
1.2.1 结构整体
本次研究主要利用地空两用形式的机器人针对农田信息进行采集。结合四旋翼有效提升机器人整体的越障性能,实现对农业信息更为全方位的采集。给农业发展的机械化以及信息化形成良好的技术支持,针对农业信息形成一种实时形式的掌握和控制。本研究所利用的飞控系统是一体化形式的飞控系统,其具备飞行稳定、体积较小、安装方便以及信号干扰较小的优点。
1.2.2 四旋翼马力
马达结合扇叶之后,所具备的推理跟攻角之间的关系为:

其中n表示马达的扇叶数,Tt是单片扇叶所能够提供的推力,Kv是马达系统,Vm表示马达所输出的电压,Ct是扇叶尖端的长度,CLo是零升力的攻角系数,CLα是升力斜率,α则是扇叶的攻角。
本次研究所利用的电机为U3508,经过实验以及设计之后可以得出这个马达能够供给的升力大概是20N,也就是说该飞行机构能够带动总重量是两千克的机器人。对这个电机的应用能够让地空两用信息采集机器人实现正常起飞,并且能够在空中实现对各种规定动作的完成。
1.2.3 四旋翼的控制算法
该研究当中的四旋翼机器人主要是利用对MPU6050的搭载,实现针对四旋翼位置以及姿态的调整和控制。结合笔者所设置的反馈控制算法能够让四旋翼实现对稳定姿态的自动调整,让四旋翼机器人完成翻滚和俯仰之类的动作。同时,结合对AT9遥控器当中的档位开关加以控制,从而针对机器人内部的行走机构实现控制,利用一个遥控器可以实现对机器人两项功能的控制。融入卡尔曼滤波法能够针对四旋翼形成更为平稳的控制。本次研究主要是将经典PID控制算法跟卡尔曼滤波之间相互结合的方式形成对四旋翼的有效控制。
1.3 信息采集系统
1.3.1 系统设计
该次研究当中的地空两用信息采集机器人所搭载的信息采集系统有摄像头、湿度传感器、温度传感器、PM2.5传感器以及光照强度传感器。结合蓝牙模块利用无线传输的形式实现向信息采集终端的输送,形成了针对农业信息实时形式的监控。针对采集的数据加以处理,能够给今后的农业生产活动供给出优质的参考。
1.3.2 系统测试
我们在实验室当中针对信息采集系统做出相应的测试。本次研究能够实现针对光照强度以及PM2.5数据的实时采集,继而将其传输到计算机终端,从而给农业生产活动供给可靠的数据信息支持。工作人员能够对计算机当中所采集到的农业信息,针对农田实施更为有效的监控。经过测验之后确定该系统能够给农业物联网的相关系统供给优质的数据信息。
2 农业信息物联网的构建
目前所应用的农业物联网通常是结合感知层、应用层以及传输层实现对物联网体系整体的构建。在节点位置对传感器进行设置,从而获取相关信息,通过节点对信息进行传输,实现对信息感知系统的建设。利用这样的方式对农业物联网加以构建能够实现信息采集以及传输过程的精准化以及实时化。而目前对于农业物联网所实施的研究工作主要是将农业信息存储于相应的服务器当中,继而对网络加以利用实现向终端的上传。农业物联网相关的各种技术正在逐渐跟云计算之间相互融合,从而在农业信息采集工作当中加以应用,提供更为优质的服务。农业信息的物联网目前正在朝着信息采集的实时化、精准化以及全面化方向发展。
3 结束语
总而言之,对地空两用农业信息采集机器人的设计以及实现能够有效推动我国农业的信息化以及自动化发展,从而给各行业的发展形成更好的支撑,促进国家经济建设。
[1]王玉山,王伟,王智琦,李超艺,李仲阳,宋家洛,吴海超,曲春宇.地空两用农业信息采集机器人设计[J].机电工程技术 ,2017,(11):67-70.
[2]杨洪坤,周保平,王亚明,赵群喜.农业信息采集技术研究综述[J].安徽农学通报,2016,22(22):109-112.
[3]孙凤青,康雷,吴晓莲,李雪燕,柯楠.理顺农业信息采集机制加快农产品市场预警建设[J]. 南方农业,2012,6(03):80-84.
[4]徐刚,陈天恩,陈立平,王彦集,郜允兵.基于ARIS的农业信息采集平台需求分析方法[J]. 农业工程学报,2009,25(08):136-140.
