电传动履带装甲车辆基本运动性能仿真
2018-03-21廖自力阳贵兵张晓峰
廖自力,张 杰,阳贵兵,张晓峰
(装甲兵工程学院 控制工程系,北京 100072)
1 引言
随着电力技术的发展,电传动由于响应速度快和可以实现动力的无级传递等优点在履带装甲车辆上的应用受到了广泛的重视[1]。目前在国外,军用装甲车辆电传动的仿真研究非常活跃,如文献[2]利用Matlab/Simulink对整车电传动系统的建模和仿真以及美国军队研究实验室为全电战斗车辆设计的一种综合仿真平台等[2]。在整车动力学的建模和仿真上,各国均采用多体动力学分析软件对装甲车辆的动力学进行仿真和研究。而利用虚拟样机技术可以将多个领域的的模型进行联合仿真,能够更好地为原理样机的研制提供技术支撑,同时可以减小风险投入,提前对系统的性能进行预测和评估,更好地为研发人员改进样机的设计提供参考[3]。利用Matlab和RecurDyn软件构建了电传动履带装甲车辆虚拟样机模型,通过对该模型进行联合仿真,评估并验证了电传动履带装甲车辆的基本运动性能。
2 电传动方案及总体性能指标

表1 样车的总体参数与性能指标Tab.1 The Overall Parameters and Performance Index of Sample Vehicle
履带车辆主要应用在复杂路况条件下,因此必须具有良好的运动性能。而采用何种电传动方案对车辆的运动性能影响很大。目前,应用在履带车辆中的电传动系统方案结构主要有以下四种:串联式双侧电机方案、串联式双电机综合电传动方案、混联式混合驱动方案以及整体式混合驱动方案。由于串联式双侧电机方案具有结构简单、节省空间、车内布局灵活和系统可靠性高等优点,因此选取串联式双侧电机方案。按照电传动履带装甲车辆的功能,同时以目前国内外现有的履带装甲车辆的性能参数作为依据,根据实际应用情况,设计并提出了样车的总体参数和性能指标,如表1所示。
3 虚拟样机建模
虚拟样机建模主要包括:电机控制系统建模、车辆动力学建模和联合仿真建模。
3.1 电机控制系统建模
直流无刷电机具有良好的调速能力、启动转矩大以及控制方便等优点。因此,在车辆的电驱动系统中电机选择无刷直流电机[4]。电机的性能参数选择,如表2所示。

表2 电机的性能参数Tab.2 The Performance Parameters of Motor
3.1 .1电机建模
直流无刷电机的数学模型为:
(1)电压方程

式中:ua、ub、uc—三相定子电压;R—定子每相绕组的电阻;ia、ib、ic—三相定子电流;L—三相定子的自感;M—三相定子之间的互感;ea、eb、ec—三相定子的反电动势。
(2)转矩的特性方程:

式中:Te—电磁转矩;ω—电机的机械角速度。
(3)电机运动方程

式中:TL—电机加载的转矩;J—转动惯量;Bv—黏滞摩擦系数。
式(1)、式(2)和式(3)共同组成了直流无刷电机的数学模型。
3.1 .2直流无刷电机控制系统模型
直流无刷电机在现代社会的各个领域应用都比较广泛,同时目前在直流无刷电机速度控制系统的研究上也有大量的成果,按照控制方法的不同基本分为开环控制和闭环控制两大类[4-7]。其中最常用的就是双闭环速度控制,内环一般是电流环或者转矩环,外环一般为速度环或者电压环。
根据直流无刷电机的基本特性和数学模型,设计了其双闭环控制系统模型,该模型基本框图,如图1所示。在系统中外环的速度环和内环的电流环都采用了典型的PID调节器。
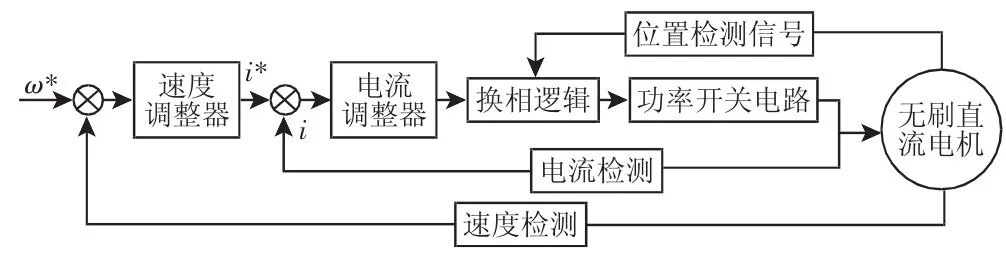
图1 直流无刷电机控制系统基本框图Fig.1 The Basic Skeleton Diagram of Brushless DC Motor Control System
3.2 车辆动力学建模
利用RecurDyn软件搭建了样车的动力学模型,主要由车体、推进部分以及悬挂部分组成。其中车体以某型履带式装甲车辆为参考,利用Solidworks软件建立车辆的3D实体模型,然后导入RecurDyn中进行动力学建模;推进部分由主动轮、负重轮、履带和履带调节器等组成;悬挂装置由减震器、平衡肘和连杆等组成[8]。两个直流无刷电机通过固定约束连在车体上,主动轮通过旋转副与电机的输出轴相连,只要给主动轮上的旋转副施加力矩就可以驱动车辆运动进行相关的仿真。采用三角片元素法生成路面模型,形成车辆—路面系统[9]。最后建立的样车动力学模型,如图2所示。

图2 履带装甲车辆动力学模型Fig.2 The Dynamic Model of Tracked Armored Vehicle
3.3 联合仿真建模
利用RecurDyn提供的软件接口技术,可以将上述两个模型进行联合,组建初步的虚拟样机模型来模拟车辆的运动情况[10-11]。联合仿真的结果,如图3所示。其中“drive”模块的输入分别为两侧电机的功率;模块“motor_L”和“motor_R”分别为两侧的电机驱动系统;模块“Gain1”、“Gain2”、“Gain3”和“Gain4”为电机减速器的传动比;模块“RecurDyn Plant Block”为车辆的多体动力学模型,将电机的输出转矩定义为该模块的输入变量,主动轮的角速度定义为输出变量。
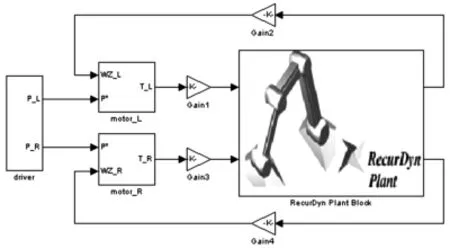
图3 联合仿真模型Fig.3 The Co-Simulation Model
4 联合仿真分析
4.1 (0~32)km/h加速性能仿真
车辆改变速度的能力就是加速性能,能够很好地体现出车辆的驱动性能。在战场上,车辆的加速性越好,其作战能力和生存能力就越强。根据我国装甲车辆通用规范,主要对样车(0~32)km/h的加速时间、加速度和加速距离进行仿真。
在附着系数为0.72、行驶阻力系数为0.04的水平良好坚硬路面上,忽略空气阻力的影响,将加速踏板踩至最大,即给定驱动电机最大功率185kW,仿真结果,如图4~图6所示。
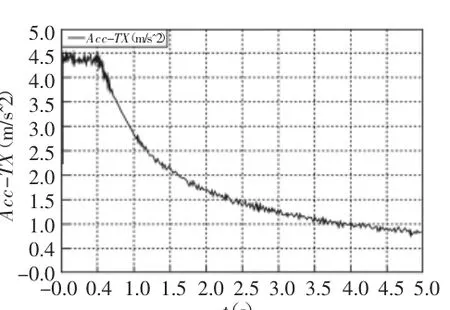
图 5(0~32)km/h加速度曲线Fig.5 The Acceleration Curve of(0~32)km/h
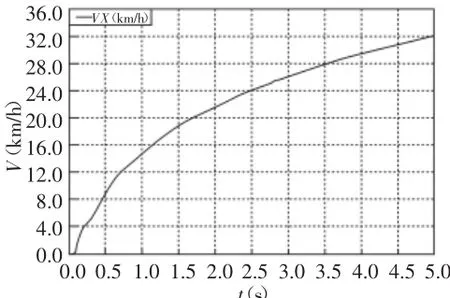
图4 (0~32)km/h车速曲线Fig.4 The Speed Curve of(0~32)km/h

图6 (0~32)km/h加速距离曲线Fig.6 The Accelerate Distance Curve of(0~32)km/h
由加速曲线得到车辆加速到32km/h的时间是5s,加速度最大可以达到是4.4m/s2,加速距离是30m。因为在实际中,还需要综合路面以及驱动效率等情况,车辆(0~32)km/h的加速时间为8s是符合实际的。传统机械传动履带车辆(0~32)km/h的加速时间约为11.5s,相比之下电传动车辆的加速性能具有明显的优势。
在相同的功率条件下,随着路面滚动阻力系数的增大,车辆(0~32)km/h的加速时间和加速距离相应增加。
4.2 最高车速仿真
对样车的最高车速进行仿真,可以验证样车的最高速度指标和极限速度下行驶的能力。
给定驱动电机最大功率185kW,分别在附着系数为0.72、行驶阻力系数为0.04的坚硬路面和附着系数为0.68、行驶阻力系数为0.07的水平良好坚硬路面良好土路上仿真得到样车的最高车速,如图7所示。
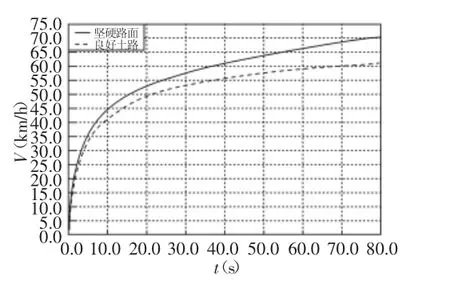
图7 最高车速仿真曲线Fig.7 The Simulated Curve of Maximum Speed
车辆在坚硬路面上的最高车速为70.2km/h,在土路上受到的阻力增大,因此维持车辆平稳高速运行的牵引力也较大,最高车速能够达到60.8km/h。
4.3 爬32°坡性能仿真
在坡度为32°、坡高为10m、附着系数为0.72且行驶阻力系数为0.04的良好坚硬路面上,给定最大功率为185kW,车辆起动后开始爬坡,仿真结果,如图8~图10所示。
图8 爬坡过程Fig.8 The Process of Climbing

图9 车辆爬坡过程车速曲线Fig.9 The Speed Curve in Process of Climbing

图10车辆爬坡过程质心轨迹曲线Fig.10 The Centroid Trajectory Curve in Process of Climbing
由图9可知,车辆从起动到完全爬上坡顶需要8s的时间,起动阶段车辆在平坦路面上行驶,车速逐渐增加;t=0.45s时,履带刚刚与坡面接触,阻力突然增大造成车速的波动;(0.45~1.6)s期间,是履带与坡面从刚刚开始接触到完全接触的过渡阶段,车辆受到的阻力逐渐增大,由于车辆的牵引力大于地面阻力,所以车速仍然缓慢上升;在(1.6~6)s期间,履带与坡面完全接触,车辆开始爬坡,车辆牵引力和地面阻力趋于相等,车辆以11.5km/h的速度匀速爬坡;在(6~7.9)s期间,履带前端离开坡面到样车重新落到地面上,因为阻力减小,车速逐渐增加;但是7.9s之后履带和地面产生剧烈碰撞,悬挂装置起缓冲作用,造成车速有小幅下降;在车辆恢复平稳之后,在平坦路面上继续加速行驶。
车辆的质心轨迹,如图10所示。与坡面的轮廓相似,凸起部分是车辆即将到达坡顶履带和坡面分离时,由于继续加速,车辆由上升至落到坡顶地面的过程。
5 结论
通过联合仿真分析,可以得到以下结论:(1)采用虚拟样机技术对电传动履带装甲车辆的基本运动性能进行仿真是行之有效的。(2)仿真结果表明,样车的基本运动性能与提出的性能指标基本一致,为下一步实车的研制提供了技术支撑。
[1]Werner Romhild.Thermal Model Analysis of Diesel-electric Powertrain with Fasimat Based on MatlabSimulink[C].4th International AECV Conference,2002.
[2]孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008.(Sun Feng-chun,Zhang Cheng-ning.Technologies for the Hybrid Electric Drive System of Armored Vehicle[M].Beijing:National Defence Industry Press,2008.)
[3]郑建荣.ADAMS—虚拟样机技术的入门与提高[M].北京:机械工业出版社,2001.(Zheng Jian-rong.Adams—Virtual Prototyping Technology Introduction and Rise[M].Beijing:Machinery Industry Press,2001.)
[4]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.(Xia Chang-liang.Brushless DC Motor Control System[M].Beijing:Science Press,2009.)
[5]Pillay P,Krishnan R.Modeling simulation and analysis of permanentmagnet motor drivers(I):the permanent-magnet synchronous motor drives[J].IEEE Industry Applications,1989,25(2):265-273.
[6]Pillay P,Krishnan R.Modeling simulation and analysis of permanentmagnet motor drives(II):the brushless DC motor drive[J].IEEE Industry Applications,1989,25(2):274-279.
[7]Lehuy H.Modeling and simulation of electrical drives using matlab simulink and power system blockset[J].IEEE Proceeding from Industrial Electronic Society,2001,3(2):1603-1611.
[8]刘维平,孙伟.坦克装甲车辆构造学[M].北京:兵器工业出版社,2001.(Liu Wei-ping,Sun Wei.Tectonicsof Tank and Armored Force Vehicle[M].Beijing:Armament Industry Press,2001.)
[9]王双双,张豫南,颜南明.基于虚拟样机技术的电传动履带车辆特殊运动性能仿真[J].兵工学报,2009,30(11):1418-1423.(Wang Shuang-shuang,Zhang Yu-nan,Yan Nan-ming.Simulation on performance of special movement of electric transmission tracked vehicle based on virtual prototyping[J].Acta Armamentarii,2009,30(11):1418-1423.)
[10]赵玉慧,刘春光,臧克茂.基于Matlab与RecurDyn的电传动履带车辆的联合仿真[J].车辆与动力技术,2007(3):24-27.(Zhao Yu-hui,Liu Chun-guang,Zang Ke-mao.Co-simulation of the electric drived armored vehicle based on matlab and recurdyn [J].Vehicle&Power Technolog,2007(3):24-27.)
[11]张建翔,魏燕明.主从履带复合式越障机器人Recurdyn行走研究[J].机械设计与制造,2013(2):107-109.(Zhang Jian-xiang,Wei Yan-ming.Walk research of master-slave crawlerobstaclesrobotinrecurdyn[J].MachineryDesign&Manufacture,2013(2):107-109.)