带视线角约束的多导弹有限时间协同制导律
2018-03-20吕腾吕跃勇李传江郭延宁
吕腾, 吕跃勇, 李传江, 郭延宁
(哈尔滨工业大学 航天学院, 黑龙江 哈尔滨 150001)
0 引言
随着反导技术的快速发展,面对敌方地面或海面目标配备的密集导弹防御系统,单一导弹突防变得愈发困难,而多导弹协同作战借助于通信系统将多枚导弹构成一个作战网络,通过信息共享实现配合与协作,共同完成打击任务,极大地提高了导弹的突防概率[1-3]。因而对多导弹协同制导的研究具有非常重要的实用价值,特别是在带末端视线角约束、能打击机动目标和有限时间协同等3个方面具有重要的研究意义,具体体现在:1)带有末端视线角约束可使多导弹从期望方向对目标进行打击,从而大大提高导弹的突防能力和打击效果;2)可打击机动目标能够极大地扩展导弹的适用场合;3)基于多智能体协同控制理论设计的有限时间协同制导律,可使多导弹打击时刻在有限时间内达到一致,有利于加快系统响应速度,提高整体突防概率。因此,本文针对考虑上述3个方面的多导弹协同制导进行研究。
多导弹协同制导的特点是在发射前并不需要指定统一的打击时刻,而是在发射后的飞行过程中通过弹间通信使得多导弹的打击时刻趋于一致,从而实现同时击中目标[4]。针对只考虑上述3个方面中一个方面的协同制导问题,Wang等[5]通过在比例导引律和带角度约束导引律的基础上附加一项本导弹与相邻导弹打击时刻误差控制项,设计了一种分布式协同制导律。张春妍等[6]利用各导弹的剩余飞行时间之差,对带视线角约束的偏置比例导引律中的比例系数进行调节,提出了一种协同偏置比例导引律。赵启伦等[7]提出了一种异类导弹协同制导律。文献[5-7]所提出的协同制导律,虽然带有末端视线角约束,但是未考虑有限时间协同且只能打击静止目标。Zhao等[8]通过在传统比例制导律基础上增加目标机动项和时间协同项设计了一种偏置比例协同制导律,可使得多导弹协同打击机动目标。孙雪娇等[9]在分布式通信和增广比例导引的基础上,基于网络同步原理提出了一种多导弹分布式协同制导律。赵启伦等[10]基于改进比例导引法和2阶一致性算法提出了一种具有领弹- 从弹拓扑结构的异类导弹协同制导律。文献[8-10]所提出的协同制导律,虽然能打击机动目标,但是未带末端视线角约束且未考虑有限时间协同问题。Hou等[11]基于时变比例导引法提出了一种协同制导律,该导引率虽然能实现有限时间协同,但是未带末端视线角约束且只能打击固定目标。针对同时考虑上述3个方面中两个方面的协同制导问题,惠耀洛等[12]通过设计扩张状态观测器来对目标加速度进行估计,然后基于滑模控制理论提出了一种协同制导律,该制导律虽然带视线角约束且可打击机动目标,但是未考虑有限时间协同。Zhang等[13]基于1阶多智能体系统协同控制理论,提出了一种既可打击机动目标又可实现有限时间协同的制导律,但是该制导律未考虑末端视线角约束。
目前,国内外学者针对同时考虑上述3个方面的协同制导研究成果相对较少,又由于其有着十分重要的实用价值,因而本文针对同时考虑这3个方面的协同制导律进行研究。在视线方向,基于多智能体协同控制理论和积分滑模控制理论设计了可使多导弹打击时刻有限时间内达到一致的分布式协同制导律,并给出了相应的稳定性证明。在视线法向方向,基于有限时间滑模控制理论和干扰观测器理论设计了带末端视线角约束且能打击机动目标的制导律,并给出了相应的稳定性证明。通过仿真验证了所设计的协同制导律可使多导弹从各自的期望方向同时击中机动目标。
现对本文所提方法的优势和必要性进行进一步说明。本文所提方法除了考虑多导弹的有限时间协同问题之外,还同时考虑了带有末端视线角约束和可打击机动目标这两个重要问题。目前国内外学者所设计的协同制导律主要针对的是静止目标且大部分未带末端视线角约束。针对有限时间问题,本文所提方法不仅可使多导弹打击时刻在有限时间内达到一致,还可使视线角在有限时间内收敛到期望值,有利于加快视线角收敛速度。本文所提方法无需明确了解目标加速度的信息,有利于工程应用。另外,所设计的视线法向制导律采用了干扰观测器对干扰进行了估计并补偿,使得切换增益幅值大大减小,进而减弱了符号函数项给制导律带来的抖振。值得一提的是,本文协同制导律采用的是分布式通信,使得每枚导弹只需要知道其相邻导弹的信息,从而降低了对弹间通信距离的要求,同时还提高了弹群的整体突防能力,即使弹群中部分导弹被击毁,只要剩余导弹通信拓扑仍然是无向且连通的,则其打击时刻依然可以达到一致。
1 协同制导模型
为了简化研究,本文采用运动学分析方法并基于以下假设[8,14]:
1) 导弹和目标的运动视为二维平面内质点运动;
2) 导弹的导引头和自动驾驶仪动力学与制导回路相比响应足够快;
3) 每枚导弹的速度可控。
针对多导弹在平面内从不同方向同时打击机动目标问题,给出导弹与目标的相对运动几何关系,如图1所示。
图1中:Mi和T分别代表第i枚导弹和目标,ri代表Mi与T之间的相对距离,qi代表Mi的视线角,vmi和vt分别代表Mi和T的速度,θmi和θt分别代表Mi和T的弹道角,ami和at分别代表Mi和T的法向加速度,其中i=1,2,…,n,n为导弹总枚数。
由图1得到Mi与T的相对运动方程如下:
(1)
(2)
(3)
(4)
将(1)式和(2)式分别对时间进行求导,并与(3)式和(4)式相结合可得
(5)
(6)
(7)
(8)
(9)
(10)
(11)
本文针对(11)式,首先,在视线方向设计uri使x1i及x2i在有限时间内达到一致;然后,在视线法向方向设计uqi使x3i及x4i在有限时间内收敛到0;最后,将得到的uri和uqi都代入到(11)式中,并通过仿真验证所设计制导律的有效性。
2 协同制导律设计
2.1 视线方向制导律设计
2.1.1 无向图的相关知识
在多导弹协同制导中,导弹通过与其相邻导弹之间的相互通信交换各自的状态信息。相互间通信拓扑关系可由无向图G(A)=(v,ξ,A)来描述,其中v代表节点组成的集合,ξ代表节点之间的连线,矩阵A=[aij]∈Rn×n代表权系数矩阵,若导弹i和导弹j之间能够进行信息交换,则aij=1,否则aij=0,特别地,aii=0,i∈{1,2,…,n},由于G(A)是无向图,因而有aij=aji. 如果G(A)中任意两个节点间都存在至少一条通路,则整个图是连通的。定义多导弹间无向图G(A)对应的拉普拉斯矩阵为L=[lij]∈Rn×n,其中矩阵的元素为
(12)
2.1.2 视线方向协同制导模型和设计目标
由(11)式可得Mi视线方向协同制导模型如下:
(13)
Mi的打击时刻tfi可表示为
tfi=tgoi+t,
(14)
式中:tgoi为Mi的剩余飞行时间。则有
tfi-tfj=tgoi-tgoj.
(15)
由(15)式可知,如果能控制多导弹的tgoi达到一致,就可使其tfi达到一致,从而实现同时击中目标,tgoi可由(16)式估计得到:
(16)
本节的设计目标是针对每枚Mi的视线方向制导模型(13)式,通过设计视线方向协同制导律uri来控制x1i及x2i在有限时间Tr内达到一致,即
(17)
从而使所有导弹的tgoi在有限时间内达到一致。
2.1.3 视线方向制导律设计及其稳定性证明
受文献[15]和文献[16]启发,下面以定理的方式给出视线方向协同制导律。
定理1针对系统(13)式,如果存在常数lr>0,使得‖dr‖∞≤lr,同时,通信拓扑结构图G无向且连通,则视线方向可使得状态x1i和x2i在有限时间内达到一致的分布式协同制导律设计如下:
(18)
(19)
(20)
式中:k1r>0,k2r>0,0<αr<1,k3ri>lr且k4ri>0,以保证sri在有限时间内收敛到0;sig(ξ)α=|ξ|α·sgn(ξ).
证明针对系统(13)式,首先,将积分滑模面(19)式对时间求导并与(13)式和(18)式结合可得
(21)
选取Lyapunov函数
(22)
将(22)式对时间求导可得

(23)
由于k3ri>lr,由有限时间稳定性理论可知滑模面sri可在有限时间Tri内收敛到0,取Tr=max{Tr1,Tr2,…,Trn},则有
sri=0,t≥Tr.
(24)
对(24)式求导并与(19)式和(20)式相结合可得
(25)
令x1=[x11,x12,…,x1n]T,x2=[x21,x22,…,x2n]T,则(25)式可写成如下矩阵形式:
(26)
(27)
由于当且仅当X1=0且X2=0时,x11=x12=…=x1n且x21=x22=…=x2n,因而系统(25)式的状态x1i和x2i各自在有限时间内达到一致,等价于系统(27)式的状态X1和X2各自在有限时间内收敛于0.
选取Lyapunov函数形式如下:

(28)
由于LM=L=ML且LT=L,将V1对时间求导可得

(29)
由LaSalle不变集原理可知系统(27)式的平衡点是全局渐近稳定的,同时,通过选择0<αr<1可得系统具有负齐次度κ=(αr-1)/(αr+1),因而由齐次系统理论可知系统(27)式的原点是有限时间稳定的,进而可知系统(25)式的状态x1i和x2i各自在有限时间内达到一致。
定理1中uri的第1项用于调整多导弹的x1i和x2i使其在有限时间内达到一致,第2项和第3项用于补偿dri对系统带来的影响。uri的优势在于:首先,uri采用的是分布式通信拓扑,可防止集中式通信所遇到的单点失效问题的产生,有效提高导弹群的整体生存能力;其次,uri所需要的状态x1i和x2i均可通过弹上导引头直接测量得到,而且目标加速度信息无需明确了解;最后,uri可使多导弹打击时刻在有限时间内达到一致,有利于加快系统响应速度,保证打击时刻达到一致的时间。
2.2 视线法向制导律设计
2.2.1 视线法向方向制导模型和设计目标
由(11)式可得Mi视线法向制导模型形式如下:
(30)
式中:dqi=wqi/x1i.
本节的设计目标是针对每枚Mi的视线法向制导系统(30)式设计制导律uqi,使每枚Mi的x3i及x4i在有限时间Tq内收敛到0,即

(31)

2.2.2 采用的干扰观测器
为消除系统(30)式中目标机动对系统产生的影响,可将dqi视作外部干扰,然后利用干扰观测器来对dqi进行估计,并将得到的干扰估计值qi加入到制导律中对dqi进行补偿,所采用的非线性干扰观测器如下:
(32)

2.2.3 视线法向制导律设计及其稳定性证明
受文献[18]启发,以定理的方式给出视线法向制导律。

(33)
则带有非线性干扰观测器(32)式且可使系统状态x3i和x4i在有限时间内收敛到0的视线法向制导律uqi设计如下:

(34)

(35)

证明将方程(35)式对时间求导可得
(36)
然后由(30)式、(34)式和(36)式可得

(37)
选取Lyapunov函数形式如下:
(38)
则有

(39)
(40)
由文献[18]中引理2可知,系统状态x3i和x4i可在有限时间内收敛到0.

3 仿真分析
为了验证本文所提出的带视线角约束的有限时间协同制导律的有效性和鲁棒性,下面考虑3枚导弹在平面内同时攻击一个机动目标的情形,在相同的制导律参数、通信拓扑结构及不同的导弹初始条件下,共进行2组仿真,分别称为工况1和工况2. 为减弱符号函数带来的制导指令抖动,将制导律中符号函数换成饱和函数。仿真步长取定步长5 ms.
视线方向制导律参数取为k1r=10,k2r=10,k3ri=2,k4ri=1,αr=3/10,视线法向制导律参数取为k1qi=1,k2qi=6,k3qi=1,k4qi=1,αqi=0.8,非线性干扰观测器参数取为Lqi=0.1,其中i=1,2,3.
3.1 工况1
目标和3枚导弹的初始条件分别如表1和表2所示。
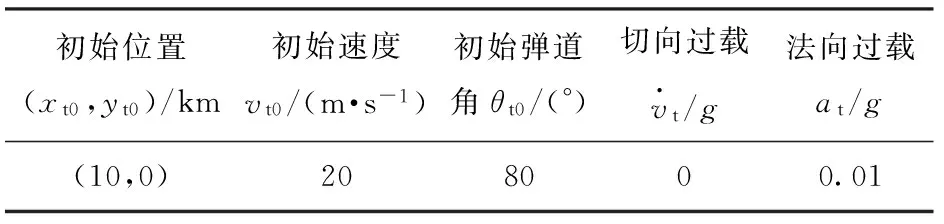
表1 目标初始条件(工况1)
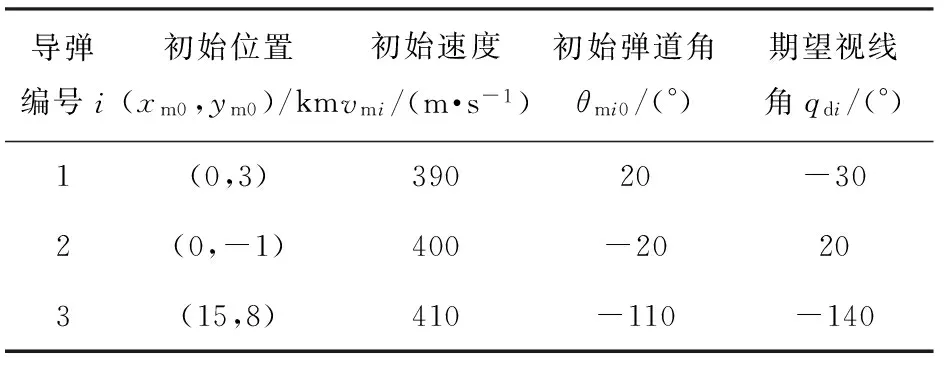
表2 导弹初始条件(工况1)

工况1下,3枚导弹的脱靶量、打击时刻和视线角误差由表3给出。它们的脱靶量都保持在0.9 m范围之内,说明本文方法提供了一种可以直接杀伤的毁伤方式。制导时间均达到一致,视线角误差均保持在0.14°范围之内,说明本文方法可使所有导弹从期望方向同时击中目标,从而实现了饱和打击。
3.2 工况2
目标和3枚导弹的初始条件分别如表4和表5所示。

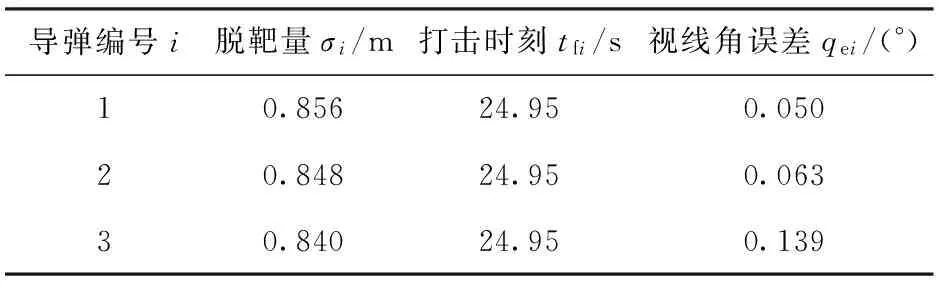
表3 协同制导仿真结果(工况1)
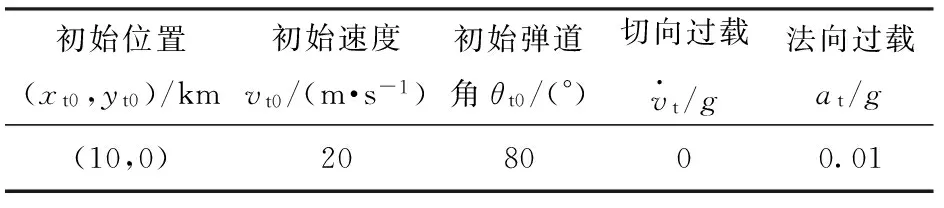
表4 目标初始条件(工况2)

表5 导弹初始条件(工况2)
工况2下,3枚导弹的脱靶量、打击时刻和视线角误差由表6给出。由表6可知,工况2下对应的脱靶量、打击时刻和视线角误差同样满足相应的要求。
由工况1和工况2的仿真结果可以看出,虽然2组仿真的导弹初始条件不同,但在同一组参数的制导律作用下,2组仿真中多导弹的打击时刻都在有限时间内达到一致,视线角都在有限时间内收敛到期望值且所有导弹都能击中机动目标。这说明本文方法的有效性,同时还说明该方法具有一定的鲁棒性,对导弹初始条件的变化有一定的适应能力。值得一提的是,2种工况下各导弹与目标间的距离均在11 km以内,均在导弹弹载雷达的最大探测范围之内。
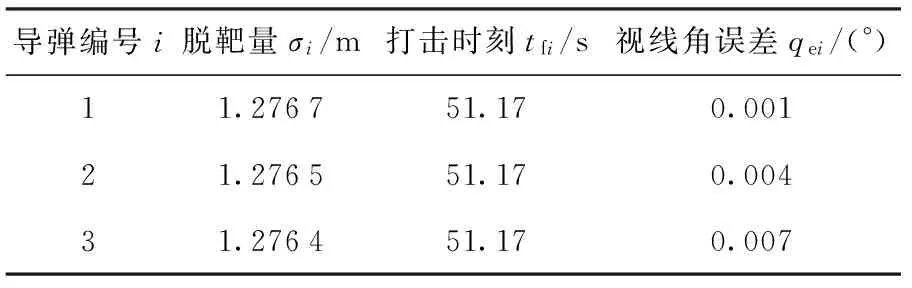
表6 协同制导仿真结果(工况2)
4 结论
本文针对多导弹以期望的视线角协同打击机动目标问题进行了研究。首先,在视线方向,设计了有限时间协同制导律,可使所有导弹打击时刻在有限时间内达到一致。然后,在视线法向方向,将目标机动当作外部干扰,采用非线性有限时间干扰观测器实现了对外部干扰的有限时间估计。接着,设计了带视线角约束的有限时间制导律,可使所有导弹的视线角在有限时间内收敛到期望视线角,且视线角速率在有限时间内收敛到0. 最后,通过仿真验证了所设计的协同制导律可使多导弹以各自期望的视线角同时击中机动目标。未来,将在考虑导弹动力学特性约束和导弹间通信拓扑时变的协同制导律设计,以及各导弹末端期望攻击方向可行域分析与制导律收敛时间定量设计等方面进行深入研究。
[1] 王青,后德龙,李君,等. 存在时延和拓扑不确定的多弹分散化协同制导时间一致性分析[J]. 兵工学报, 2014, 35(7): 982-989.
WANG Qing, HOU De-long, LI Jun, et al. Consensus analysis of multi-missile decentralized cooperative guidance time with time-delays and topologies uncertainty[J]. Acta Armamentarii, 2014, 35(7): 982-989. (in Chinese)
[2] 贾翔,吴森堂,文永明,等. 导弹自主编队综合作战效能评估方法[J]. 北京航空航天大学学报, 2017, 43(5): 1013-1022.
JIA Xiang, WU Sen-tang, WEN Yong-ming, et al. Assessment method for comprehensive combat effectiveness of missile autonomous formation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(5): 1013-1022. (in Chinese)
[3] 周德云,杨振,张堃. 多UCAV超视距协同空战中的交接制导方法[J]. 弹道学报, 2017, 29(2): 1-7.
ZHOU De-yun, YANG Zhen, ZHANG Kun. Method of guidance handover in beyond-visual-range coordinated air-combat for multi-UCAVs[J]. Journal of Ballistics, 2017, 29(2): 1-7. (in Chinese)
[4] 赵建博,杨树兴. 多导弹协同制导研究综述[J]. 航空学报, 2017, 38(1): 1-13.
ZHAO Jian-bo, YANG Shu-xing. Review of multi-missile cooperative guidance[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(1): 1-13. (in Chinese)
[5] Wang X L, Zhang Y A, Wu H L. Distributed cooperative guidance of multiple anti-ship missiles with arbitrary impact angle constraint[J]. Aerospace Science and Technology, 2015, 46:299-311.
[6] 张春妍,宋建梅,侯博,等. 带落角和时间约束的网络化导弹协同制导律[J]. 兵工学报, 2016, 37(3): 431-438.
ZHANG Chun-yan, SONG Jian-mei, HOU Bo, et al. Cooperative guidance law with impact angle and impact time constraints for networked missiles[J]. Acta Armamentarii, 2016, 37(3):431-438. (in Chinese)
[7] 赵启伦, 陈建, 李清东, 等. 高超武器与常规导弹协同攻击策略可行域研究[J]. 航空学报, 2015, 36(7): 2291-2300.
ZHAO Qi-lun, CHEN Jian, LI Qing-dong, et al. Feasible region of heterogeneous missiles coordinated guidance strategy[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(7):2291-2300. (in Chinese)
[8] Zhao J, Zhou R. Unified approach to cooperative guidance laws against stationary and maneuvering targets[J]. Nonlinear Dynamics, 2015, 81(4):1635-1647.
[9] 孙雪娇, 周锐, 吴江, 等. 攻击机动目标的多导弹分布式协同制导律[J]. 北京航空航天大学学报, 2013, 39(10): 1403-1407.
SUN Xue-jiao, ZHOU Rui, WU Jiang, et al. Distributed cooperative guidance law for multiple missiles attacking maneuver target[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10):1403-1407. (in Chinese)
[10] 赵启伦,陈建,董希旺,等. 拦截高超声速目标的异类导弹协同制导律[J]. 航空学报, 2016, 37(3):936-948
ZHAO Qi-lun, CHEN Jian, DONG Xi-wang, et al. Cooperative guidance law for heterogeneous missiles intercepting hypersonic weapon[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3):936-948. (in Chinese)
[11] Hou D L, Wang Q, Sun X J, et al. Finite-time cooperative guidance laws for multiple missiles with acceleration saturation constraints[J]. IET Control Theory & Applications, 2015, 9(10):1525-1535.
[12] 惠耀洛,南英,陈哨东,等. 带末端角度约束的多导弹协同制导律设计[J]. 弹道学报, 2015, 27(3): 41-46.
HUI Yao-luo, NAN Ying, CHEN Shao-dong, et al. Cooperative guidance law for multiple missiles with terminal impact angle constraint[J]. Journal of Ballistics, 2015, 27(3):41-46. (in Chinese)
[13] Zhang P, Liu H T, Li X B, et al. Fault tolerance of cooperative interception using multiple flight vehicles[J]. Journal of the Franklin Institute, 2013, 350(9):2373-2395.
[14] 周锐, 孙雪娇, 吴江, 等. 多导弹分布式协同制导与反步滑模控制方法[J]. 控制与决策, 2014, 29(9): 1617-1622.
ZHOU Rui, SUN Xue-jiao, WU Jiang, et al. Multi-missile distributed cooperative guidance integrating backstepping sliding mode control[J]. Control and Decision, 2014, 29(9): 1617-1622.(in Chinese)
[15] Zhao Y, Duan Z S, Wen G H. Finite-time consensus for second-order multi-agent systems with saturated control protocols[J]. IET Control Theory & Applications, 2015, 9(3):312-319.
[16] Yu S H, Long X J. Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode[J]. Automatica, 2015, 54:158-165.
[17] Levant A. Higher-order sliding modes, differentiation and output-feedback control[J]. International Journal of Control, 2003, 76(9):924-942.
[18] Zhang Z X, Li S H, Luo S. Terminal guidance laws of missile based on ISMC and NDOB with impact angle constraint[J]. Aerospace Science and Technology, 2013, 31:30-41.