坦克行驶扬尘浓度分布特性数值模拟研究
2018-03-20陈慧敏冯星泰王凤杰刘伟博
陈慧敏, 冯星泰, 王凤杰, 刘伟博
(北京理工大学 机电动态控制重点实验室, 北京 100081)
0 引言
激光引信由于具有方向性好和抗电磁干扰能力强的优点,成为国内外研究的热点。目前激光引信已在空空导弹、反辐射导弹及反坦克导弹等领域得到广泛应用[1]。激光在云雾、扬尘等气溶胶环境传输时,会发生不同程度的吸收和散射,导致激光引信探测性能下降[2-3]。陆地战场环境中,由坦克行驶带起的大量扬尘严重制约了激光引信在陆地战场环境中的应用。为了研究激光引信在扬尘环境中的作用机理与抗扬尘干扰方法,有必要对典型战场环境中的扬尘浓度分布特性进行研究。
关于坦克行驶扬尘浓度分布研究方面,国内外尚未见公开报道。机动车扬尘研究方面,张承中等[4]采用现场定点采样实验方法,定量分析了路面积尘负荷、车速和车型与扬尘浓度的关系,但该方法不能描述整个空间的扬尘动态分布。董子文等[5]使用多物理场仿真COMSOL软件对矿井中受限巷道内无轨胶轮车行驶产生的扬尘进行仿真,对比分析了顺风和逆风条件下车辆行驶产生的扬尘浓度分布规律,仿真为静态仿真,没有考虑扬尘随时间的变化。张瑶等[6]采用瞬态仿真方法,研究了车辆在不同车速和不同质量流率条件下扬尘浓度随时间的变化,仿真假设颗粒入射方法为单位时间内全部入射,实际情况是扬尘在初始阶段会逐渐积累,与模拟结果有所出入。李招武等[7]根据风沙理论,推导了扬尘颗粒的入射条件并在不同车速下进行扬尘分布模拟,但对扬尘的动态变化过程没有进行描述。
本文对坦克行驶扬尘的浓度分布特性进行研究,由于坦克行驶现场试验工程量大、成本高,而计算流体力学方法对复杂流体流动和气体与固体两相流模拟具有较高的仿真精度,因此本文采用计算流体力学方法,基于ANSYS Fluent软件对坦克行驶扬尘浓度分布进行数值模拟。
1 仿真模型及仿真条件
1.1 数值模型
1.1.1 湍流模型
湍流模型中,重正化群(RNG)k-ε模型较标准k-ε模型可以更好地模拟高应变率、大曲率和强旋流流动,对于不可压缩流体,忽略浮力作用,其湍动能和湍流耗散方程描述[8-9]如下:

(1)

(2)
式中:k、ε、ρ、ui、μeff分别为湍动能、湍流耗散率、气相密度、气相速度、湍流黏度,i=1,2,3代表x、y、z3个不同方向;Gk为由层流速度梯度产生的湍流动能;Sk、Sε为自定义源相;C1ε、C2ε为常数,分别为1.42和1.68;xi、xj为湍流模型的张量形式表示,i,j=1,2,3代表x、y、z3个不同方向。相对于标准k-ε模型,RNGk-ε模型包含了湍流普朗特数αk和αε,并通过修正湍流黏度,考虑了湍流旋涡的情况,同时在ε方程中增加了附加项Rε来反映主流的时均应变率。因此RNGk-ε模型ε更适合坦克车辆行驶外流场的数值模拟。
1.1.2 离散相模型
离散相模型(DPM)是遵循欧拉- 拉格朗日法的两相流数值模型,该模型将流体视为连续相,在拉格朗日坐标下对颗粒作用力微分方程进行积分来求解颗粒的运动轨道[10]。笛卡尔坐标系下,颗粒的作用力平衡方程和轨迹方程(x方向)描述如下:
(3)

(4)
式中:u1、up、ρp分别为流体相速度、颗粒速度、颗粒密度;FD(u1-up)为颗粒的单位质量曳力函数;gx(ρp-ρ)/ρp为颗粒的单位质量重力与浮力之差;Fx为单位质量的其他作用力。对(3)式在离散的时间步长上逐步积分就得到颗粒轨道上每一个位置上的颗粒速度,对(4)式沿每个坐标方向积分求解即得到颗粒相的轨迹。
1.1.3 随机轨道模型
上述颗粒运动模型得出的颗粒轨迹是固定的,当流体为湍流流动时,必须考虑湍流扩散对颗粒轨迹的影响,此时颗粒运动轨迹具有随机性。随机轨道模型可以对颗粒的湍流扩散进行描述,其在颗粒的作用力平衡方程中使用瞬时流体速度[11]为
(5)
采用离散随机游走(DRW)模型[12]对u′i(t)进行描述,该模型将颗粒穿过一系列离散化湍流涡旋的运动特征进行迭代计算,每个湍流涡旋特征包括一组高斯分布的随机脉动速度在x、y、z3个方向的速度分量u′1、u′2、u′3和一个涡旋生存时间尺度τe.u′1、u′2、u′3的值根据高斯概率分布做随机取样:
(6)

颗粒沿x方向的轨迹计算如下:

(7)
同理可得到颗粒在y方向、z方向上的轨迹。通过计算大量具有代表性颗粒的随机轨迹,即可得到湍流对颗粒扩散的影响。
涡旋生存时间尺度τe与流体拉格朗日积分时间尺度TL有关,对k-ε模型及其派生模型TL=0.15k/ε,τe可定义为常数τe=2TL或更接近实际的随机τe=-TLlnr,其中r为[0,1]之间的均匀随机数。当颗粒与涡旋的作用时间达到该时间尺度时,正态分布随机数ζ被重新赋值以获得新的随机脉动速度。
1.2 物理模型
以59式中型坦克为原型建立坦克三维模型及其计算域,坦克车体大小为6 m×3.3 m×2.4 m(不考虑炮筒),取计算域大小为65 m×16 m×7 m,在保证仿真精度的同时尽量减小计算量,如图1所示。
计算域网格划分采用ICEM CFD软件进行四面体非结构网格划分,并在Fluent软件中转化为多面体网格。多面体网格的优势在于其在大大减少网格数量的同时能保证相当的计算精度,且网格质量更高,收敛更快[13]。四面体网格经多面体转化后数量由250万减少为50万,其中网格质量优于0.71和0.64的网格分别占95%和99%,高质量的网格保证了求解的收敛性与精度。坦克表面附近由于速度梯度大,对其网格进行了加密,在远离坦克的区域对计算精度要求不高,网格以一定的增长率逐渐变疏以减小计算量。计算域网格沿x轴和z轴方向的截面图如图2所示。
1.3 仿真条件
坦克运动采用多参考系(MRF)模型[14]描述,坦克参考系相对于绝对参考系的运动即为坦克运动。对于坦克履带,通过设置移动壁面模拟履带传动,其下表面相对地面静止,其他面在坦克参考系中运动如图3所示。
考虑坦克自身重量对扬尘分布的影响,其影响因素主要表现在履带与地面之间产生的静摩擦力使地面扬尘颗粒附着在履带表面上,因此在颗粒入射起始位置中加入履带表面,颗粒质量流率取值与地面相等,以示坦克与地面充分接触。对于地面条件,可在Fluent软件中启用粗糙壁面模型,并设置地面粗糙度参数来表征地面粗糙程度。粗糙壁面模型示意图如图4所示。
图4中,ML为平均线,h为粗糙面表面高度(以ML为参考),L为采样长度,S1、S2、S3为轮廓单元宽度。
壁面粗糙度由以下3个参数描述:
壁面平均粗糙度
(8)
粗糙度标准差
(9)
采样长度内轮廓单元平均宽度
(10)
式中:n为采样长度L内轮廓单元的个数。仿真中设置地面粗糙度参数Ra,m=Ra,s=Sm=0.01 m. 其他主要仿真条件设置如表1所示。
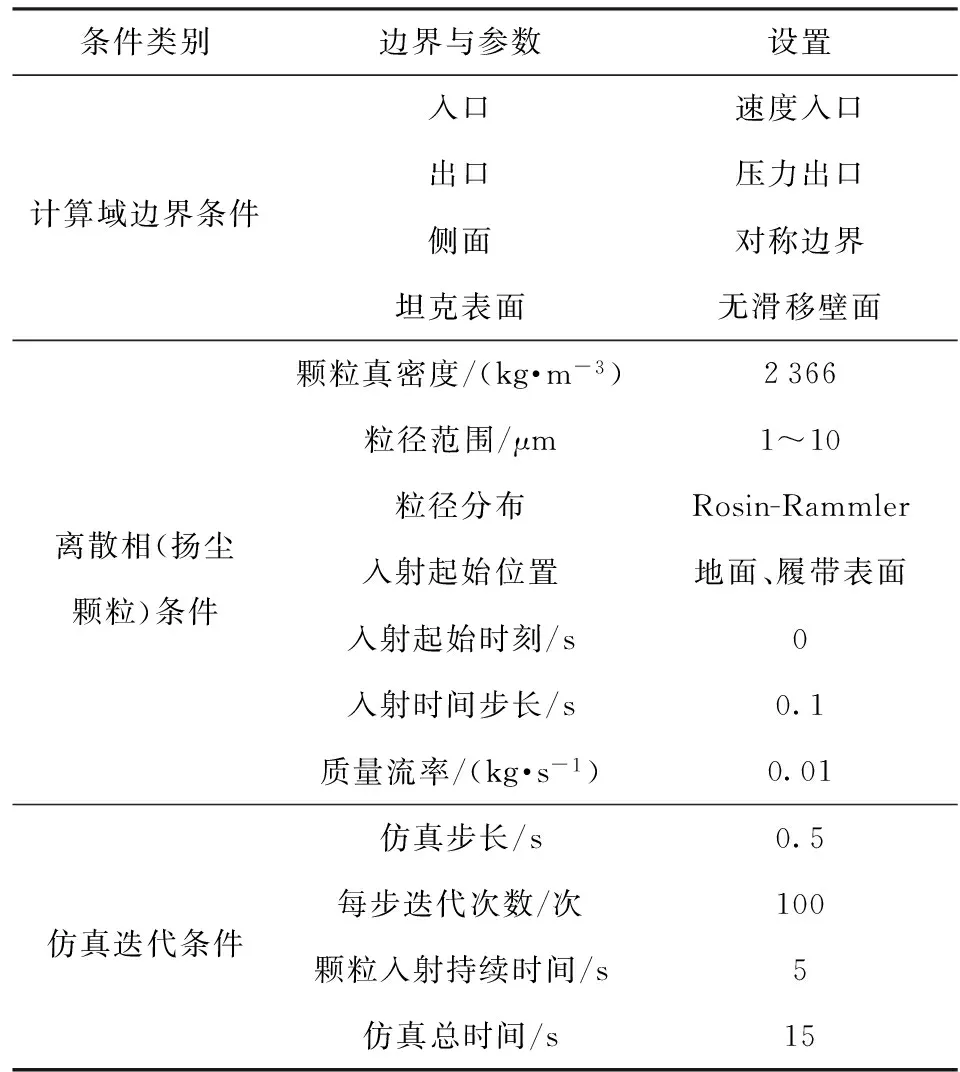
表1 仿真条件设置
2 仿真结果与分析
2.1 单一速度下扬尘浓度分布
坦克以45 km/h行驶速度下的扬尘分布云图如图5(a)、图5(b)所示,为了更清楚地观察扬尘分布情况,将显示图例最大值设为10-5kg/m3. 提取坦克中心对称面z=-1.61 m截面和平行于地面的y=1.00 m截面,在t=2 s、t=5 s、t=8 s、t=11 s和t=15 s 5个特征时间节点观察扬尘浓度分布随时间的变化情况。
从图5的仿真结果可以得到:扬尘颗粒在从地面入射后的初始阶段,颗粒在坦克行驶产生的剪切气流作用下,沿斜后上方运动,分布较为集中,从y=1.00 m截面可以看出在车身正后方形成与车身宽度相当的扬尘带;在t=5 s时,扬尘颗粒全部入射,扬尘分布范围明显增加,在坦克行驶产生的气流作用下向后方扩散明显,并开始向计算域上方和两侧扩散;根据仿真条件设置,t=5 s后再无新的颗粒入射,因此计算域内颗粒随着坦克行驶从计算域出口逃逸,使坦克周围扬尘浓度逐渐下降;同时扬尘在湍流扩散的作用下分布范围更加广泛,尤其扩散到坦克后上方的扬尘更为明显,这是由于坦克行驶造成后上方流体速度梯度变化剧烈所致。从y截面可以看到扬尘向两侧的扩散范围亦逐渐增大,同时由于颗粒从坦克履带表面入射,在车身前部由于车轮对气流的剪切作用形成剪切气流,带动周围颗粒向两侧扩散,从颗粒分布形态可以看到扬尘相对坦克向后运动的趋势。
为了对扬尘浓度变化趋势进行量化,在计算域内截取不同的平面计算每个平面的平均浓度来研究扬尘浓度的变化,如图6(a)、图6(b)、图6(c)所示,分别为沿x方向、y方向、z方向不同截面平均浓度随时间的变化。
从图6仿真结果可以得到:
1)x截面,扬尘在坦克后方远离尾部的区域(x≤-11 m)浓度变化范围明显大于近坦克尾部区域(-4 m≤x≤-2 m),在x=-18 m截面达到最高浓度24 mg/m3,并且距坦克尾部越远,扬尘浓度下降越缓慢,这正是由于扬尘随时间向后扩散的结果,这一点从t=5 s颗粒入射停止后,x≤-11 m区域浓度依然持续增加亦能看出。其次在坦克车身所在截面x=2 m处浓度最大值明显大于x=-2 m和x=-4 m两个截面,最大浓度达到18 mg/m3,这是由于在x=2 m截面处,车体与空气摩擦面积更大导致气流速度变化更剧烈,从而带起更多的扬尘;在t=2.5 s后,颗粒的持续入射对x=2 m、x=-2 m、x=-4 m 3个截面的浓度变化影响变小并趋于稳定,说明坦克附近区域扬尘浓度接近最大值,不再受颗粒持续入射的影响。
2)y截面,随着高度增加,扬尘平均浓度明显下降,在颗粒停止入射后的10 s内其平均浓度保持平衡,说明在湍流作用下颗粒长时间悬浮在空中,且重力对颗粒的沉降影响甚小。
3)z截面,比较坦克中心对称面z=-1.61 m和履带所在截面z=-0.50 m两个典型截面,可以看出在颗粒停止入射后扬尘平均浓度下降明显,且z=-1.61 m截面下降速度更快,这是由于扬尘颗粒在流场作用下向坦克两侧扩散的结果,并且在坦克中心处扩散速度更快。
2.2 不同速度对扬尘浓度分布的影响
不同的坦克行驶速度造成不同的流场速度梯度,从而影响区域内扬尘颗粒的运动轨迹和分布情况。本文对4种典型坦克行驶速度下的扬尘浓度分布进行仿真,对同一时刻不同典型截面的扬尘浓度分布进行对比分析,结果如图7(a)、图7(b)所示。
从图7可以得到:随着速度的增加,扬尘分布范围逐渐扩大,扬尘颗粒在坦克尾部沿x轴反方向运动的距离更长,同时扬尘高度逐渐增加,当坦克行驶速度大于45 km/h时,扬尘沿垂直方向的扩散明显加剧,坦克上方扬尘分布更加明显。同时在y截面可以看到,随着速度的增加,扬尘向计算域两侧的扩散更加明显,当行驶速度为60 km/h时,坦克尾部扬尘分布的宽度到达计算域两侧边界。由此说明随着坦克行驶速度的增大,坦克车身与周围空气相互作用产生的剪切气流和拖曳涡对扬尘分布的影响更为明显,扬尘颗粒运动更为剧烈,扬尘分布高度与宽度也随之增加。进一步分析不同速度下沿垂直方向扬尘平均浓度的分布,对平均浓度数据进行曲线拟合,结果如图8所示。表2为不同指数拟合曲线的参数值。从曲线拟合结果可知,在垂直方向上扬尘平均浓度呈指数规律衰减,坦克行驶速度越大,扬尘平均浓度越高,但不同速度下的平均浓度之差随着y值的增大而减小,说明随着高度的增加,行驶速度对扬尘浓度的影响变小。
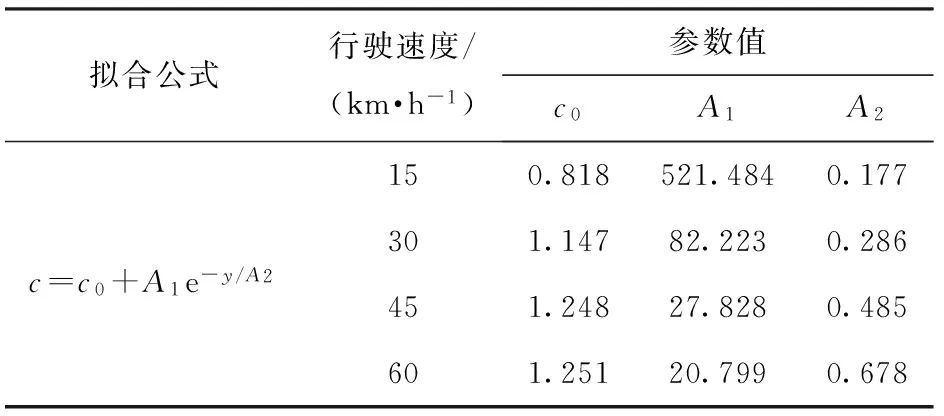
表2 曲线拟合参数
注:c为扬尘浓度;c0为扬尘浓度按指数衰减后最终达到的稳定扬尘浓度;A1、A2为指数形式曲线拟合时新出现的参数,无具体含义。
3 结论
本文基于Fluent软件,对单辆坦克行驶扬尘的浓度分布规律进行数值模拟,以59式坦克为模型,在计算域内以4种典型速度(15 km/h、30 km/h、45 km/h、60 km/h)行驶,扬尘从地面和坦克履带表面入射,质量流率0.01 kg/s,仿真时间15 s,其中前5 s内颗粒持续入射。得出的主要结论如下:
1)匀速行驶时,坦克尾部扬尘在远离尾部区域(x≤-11 m)浓度随时间变化范围更大,最大值达24 mg/m3;在颗粒持续入射阶段,坦克车身附近(x≥-4 m)扬尘浓度在t=2.5 s后趋于饱和稳定,不再随颗粒入射而持续增加。
2)重力对扬尘的分布影响可忽略不计,在无颗粒入射条件下,垂直方向上扬尘浓度变化缓慢,说明扬尘在空中悬浮持续时间较长。
3)坦克行驶速度对扬尘分布具有重要影响,速度越快,扬尘分布范围越广泛,扬尘高度与宽度都随之增加;在垂直方向上扬尘平均浓度呈指数规律衰减,高度越高,行驶速度对扬尘浓度分布的影响越小。
以上仿真结果未考虑坦克发动机尾烟、地面状况以及坦克自重等因素对扬尘浓度分布的影响,因此仿真还需进一步改进,以更贴近坦克行驶时的实际情况。本文所述仿真方法及结果对战场扬尘的实验室模拟具有一定的参考价值。
)
[1] 李枭. 激光引信高精度高频率脉冲测距技术[D].南京: 南京理工大学, 2013.
LI Xiao. High precision and high frequency pulse ranging technique for laser fuze[D].Nanjing: Nanjing University of Science and Technology, 2013. (in Chinese)
[2] 李东根. 空空导弹激光引信面临的干扰及抗干扰浅析[J]. 航空兵器, 2008(5): 38-40.
LI Dong-gen. Jamming and anti-jamming technology of air-to-air missile laser fuze[J].Aero Weaponry, 2008(5): 38-40. (in Chinese)
[3] 王惠琴, 姚宇, 曹明华. 沙尘天气下激光信号的传输特性[J].发光学报, 2017, 38(4): 521-529.
WANG Hui-qin, YAO Yu, CAO Ming-hua.Transmission characteristics of laser signal in sand and dust weather[J]. Chinese Journal of Luminescence, 2017, 38(4): 521-529. (in Chinese)
[4] 张承中, 刘立忠, 李涛. 单辆机动车二次扬尘量化计算的实验研究[J].环境工程, 2002, 20(5): 38-40.
ZHANG Cheng-zhong, LIU Li-zhong, LI Tao. Experimental study on quantitative calculation of secondary dust of single vehicle[J].Environmental Engineering, 2002, 20(5): 38-40. (in Chinese)
[5] 董子文, 齐庆杰, 于文惠, 等. 无轨胶轮车行驶巷扬尘影响因素数值模拟[J].中国安全科学学报, 2015, 25(10): 146-152.
DONG Zi-wen, QI Qing-jie, YU Wen-hui, et al. Numerical simulation of factors influencing fugitive dust caused by trackless rubber tire vehicle running in roadway[J].China Safety Science Journal, 2015, 25(10): 146-152. (in Chinese)
[6] 张瑶, 张鸿雁, 崔海航, 等. 机动车单车扬尘浓度分布规律的模拟[J].环境工程学报, 2013, 7(8): 3094-3098.
ZHANG Yao, ZHANG Hong-yan, CUI Hai-hang, et al. Numerical simulation about concentration distribution of raising dust caused by a travling vehicle[J].Chinese Journal of Environmental Engineering, 2013, 7(8): 3094-3098. (in Chinese)
[7] 李招武, 张鸿雁, 崔海航. 基于一般浓度入射条件的汽车扬尘数值模拟研究[J].环境工程, 2015, 33(1): 85-89.
LI Zhao-wu, ZHANG Hong-yan, CUI Hai-hang. Study of numerical simulation about automotive dusting based on the general inflow concentration conditions[J].Environmental Engineering, 2015, 33(1): 85-89. (in Chinese)
[8] 谭业发, 董贵杨, 谭浩广, 等. 基于计算流体力学的旋转自洁式空气预滤器数值模拟研究[J].兵工学报, 2014, 35(3): 409-414.
TAN Ye-fa, DONG Gui-yang, TAN Hao-guang, et al. Numerical simulation of rotary self-cleaning air pre-filter based on CFD[J].Acta Armamentarii, 2014, 35(3): 409-414. (in Chinese)
[9] 王福军. 计算流体动力学分析——CFD软件原理与应用[M].北京: 清华大学出版社, 2010.
WANG Fu-jun. Analysis of computational fluid dynamics—CFD software principle and application[M]. Beijing: Tsinghua University Press, 2010. (in Chinese)
[10] 马发跃. 离散相模型下公路风沙流数值模拟[D].兰州: 兰州大学, 2015.
MA Fa-yue. Numerical simulation of wind-blown sand movement around the highway by using discrete phase model[D].Lanzhou: Lanzhou University, 2015. (in Chinese)
[11] 余徽, 陈思含, 魏文韫, 等. 应用随机轨道模型研究湍流扩散对气液交叉流脱除PM2.5的影响[J].四川大学学报:工程科学版, 2015, 47(5): 178-184.
YU Hui, CHEN Si-han, WEI Wen-wen, et al. Research of diffusion of gas-liquid cross flow for PM2.5 separation by stochastic trajectory model[J].Journal of Sichuan University:Engineering Science Edition, 2015, 47(5): 178-184. (in Chinese)
[12] Rybalko M, Loth E, Lankford D. A Lagrangian particle random walk model for hybrid RANS/LES turbulent flows[J]. Powder Technology, 2012, 221:105-113.
[13] 魏成柱, 李英辉, 易宏. 多面体网格在船体绕流计算中的应用[J].上海交通大学学报, 2016, 50(8): 1144-1151.
WEI Cheng-zhu, LI Ying-hui, YI Hong.Application of polyhedral mesh in numerical simulations of flow around hulls[J].Journal of Shanghai Jiaotong University, 2016, 50(8): 1144-1151. (in Chinese)
[14] 董小倩. 吊舱推进器水动力性能数值研究[D].上海: 上海交通大学, 2013.
DONG Xiao-qian. Numerical study of the hydrodynamic perfor-mance of podded propulsor[D].Shanghai: Shanghai Jiao Tong University, 2013. (in Chinese)