基于卡尔曼滤波的无人机动力电池容量估算方法
2018-03-19田全左鹏飞
田全 左鹏飞
摘要:电动无人机由于噪音小、携带方便、受海拔影响较小等优点,广泛应用于单兵作业、高海拔作业环境中。但电动无人机动力电池对温度影响较为敏感,并且当温度低于0℃时,放电能力急速下降,因此在低温环境作业过程中准确估算电池SOC(state of charge)是保障安全飞行的关键。该文提出基于卡尔曼滤波算法的电池SOC估算方法,并结合电池充放电倍率、温度和充放电循环次数等因素对SOC估算的影响,调整卡尔曼滤波算法关键参数。研究结果表明,本方法能有效降低传统方法产生的模型误差以及累积误差,提高了SOC估算的模型准确性与估算精度。
关键词:电动无人机;SOC;扩展卡尔曼滤波
中图分类号:TP3 文献标识码:A 文章编号:1009-3044(2018)04-0218-02
A Estimation Method of Power Battery Capacity of UAV Based on Kalman Filtering
TIAN Quan, ZUO Peng-fei
Abstract: Electric UAV is widely used in individual job and operating environment of high altitude because of the advantages of low noise, portability and less influence of altitude. However, the power battery of electric UAVs is sensitive to temperature and the discharge capacity is decreasing rapidly if the weather temperature is under 0℃. Therefore, accurate estimation of battery SOC (state of charge) in low temperature environment is the key to ensure the safety of flight. This paper proposes a battery SOC estimation method Based on kalman filter algorithm. Combining with the influence of battery charge and discharge rate, temperature and charge and discharge cycle times on SOC estimation, the key parameters of kalman filter algorithm are adjusted. The research results show that, the proposed method can effectively reduce the model errors and cumulative errors caused by traditional methods, and improve the accuracy and pricision of SOC estimation.
Key words: electric UAV; SOC; extended Kalman filtering
1 概述
无人机机体平台由机体部分和动力部分组成,主要动力类型包括油动、电动等。其中电动无人机的动力电池常为锂电池类型。锂电池具有能量密度高、循环寿命长、自放电率小、无記忆效应和绿色环保等突出优势。因此,自索尼公司于1990年首次开发出锂离子电池后,由于其具有电压高、体积小、质量轻、比能量高、无记忆效应、无污染、自放电小、寿命长等优点,已经取得了飞速的发展。
在无人机飞行过程中,目前较为常用的电池剩余容量估算方法是电压观测法,根据飞控手或地面工作人员经验,进行剩余电量预判,从而掌控无人机飞行时间。此方法简单、直观、方便,但估算精度低,且受估算人员经验能力影响。为此,提出一种基于自适应扩展卡尔曼滤波的无人机动力电池SOC估算方法,该方法能提高估算精度的同时,受温度变化影响较小,有效保证了电动无人机的飞行安全。
2 SOC估算方法
锂离子电池的SOC的定义一般从电量和容量角度出发。从电量的角度将其定义为:电池在一定放电倍率下,剩余电量与相同条件额定容量的比值。
用数学公式表示为:
SOC=Qc/Ci (1)
Qc——电池的剩余容量;
Ci——电池以恒定电流I放电时具有的容量[2]。
锂离子电池SOC的测量一般分为直接量测法和间接量测法。直接法从分析电池的电化学反应原理出发,通过量测锂离子电池中锂离子和锂离子氧化物的mol含量以及温度来计算化合物化学反应释放出的化学能量,推断出反应所产生的电能,进而监控内部各个离子的状态来研究其剩余电量,但电池内阻的反应迅速剧烈,过程因素繁多复杂,难以准确监控,所以此方法并没有获得成功的实际应用[1]。另一类是通过外部间接参数的量测来推算电池剩余容量的方法,其不关注电池内阻电化学反应情况,通过外部测量电池的电压、电流、温度、内阻等参数来寻找其余电池容量变化的规律,从而估算电池SOC。该方法目前研究较多,但准确估算电池SOC还有很多地方需要进一步研究和细化[3]。
3 基于卡尔曼滤波算法的锂电池SOC估计
3.1 等效电路模型
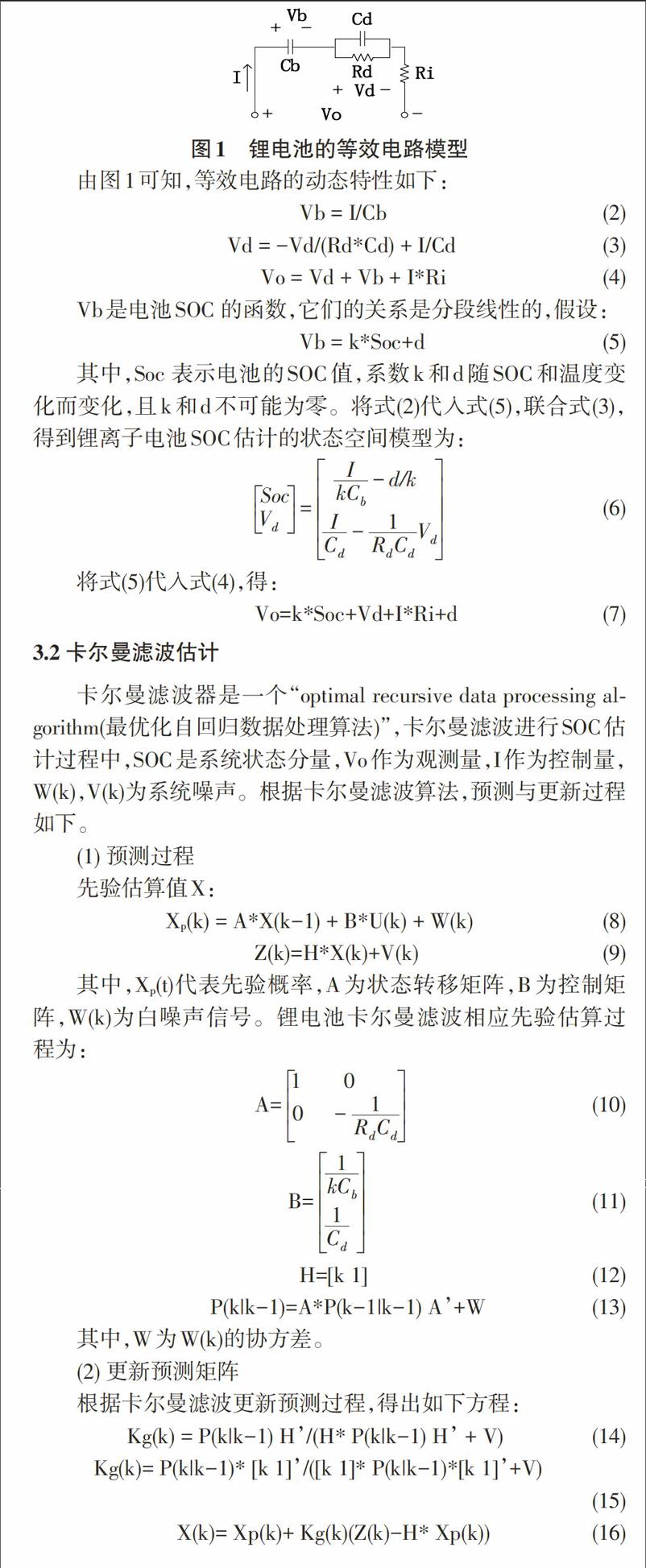
锂电池的等效电路模型,如图1所示[4]。其中,电阻Ri表示电池内阻; Rd和Cd分别表示电池表面电阻和电容;电容Cb表示电池的存储容量;电容Cb和Cd的两端电压分别为Vb和Vd;Vb表示电池开路电压(open circuit voltage, OCV);电池的端电压和端电流分别表示为Vo和I。
由图1可知,等效电路的动态特性如下:
Vb = I/Cb (2)
Vd = -Vd/(Rd*Cd) + I/Cd (3)
Vo = Vd + Vb + I*Ri (4)
Vb是电池SOC 的函数,它们的关系是分段线性的,假设:
Vb = k*Soc+d (5)
其中,Soc 表示电池的SOC值,系数k和d随SOC和温度变化而变化,且k和d不可能为零。将式(2)代入式(5),联合式(3),得到锂离子电池SOC估计的状态空间模型为:
(6)
将式(5)代入式(4),得:
Vo=k*Soc+Vd+I*Ri+d (7)
3.2 卡尔曼滤波估计
卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”,卡尔曼滤波进行SOC估计过程中,SOC是系统状态分量,Vo作为观测量,I作为控制量,W(k),V(k)为系统噪声。根据卡尔曼滤波算法,预测与更新过程如下。
(1) 预测过程
先验估算值X:
Xp(k) = A*X(k-1) + B*U(k) + W(k) (8)
Z(k)=H*X(k)+V(k) (9)
其中,Xp(t)代表先验概率,A为状态转移矩阵,B为控制矩阵,W(k)为白噪声信号。锂电池卡尔曼滤波相应先验估算过程为:
A= (10)
B= (11)
H=[k 1] (12)
P(k|k-1)=A*P(k-1|k-1) A+W (13)
其中,W为W(k)的协方差。
(2) 更新预测矩阵
根据卡尔曼滤波更新预测过程,得出如下方程:
Kg(k) = P(k|k-1) H/(H* P(k|k-1) H + V) (14)
Kg(k)= P(k|k-1)* [k 1]/([k 1]* P(k|k-1)*[k 1]+V)
(15)
X(k)= Xp(k)+ Kg(k)(Z(k)-H* Xp(k)) (16)
P(k|k)=(I- Kg(k) *H)P(k|k-1) (17)
4 試验验证
为验证卡尔曼滤波对锂电池SOC的估算精度,进行了MATLAB仿真验证,对比估算精度和偏差统计。
5 结论
本文提出了基于卡尔曼滤波的无人机动力电池SOC估算法方法,并通过MATLAB软件进行了仿真试验验证。本文SOC估算方法所计算法的估计值与实际真实值偏差较小,能够提高无人机电池使用的安全性。但卡尔曼滤波对噪声和初始状态的初始化过程会影响估计精度,并且建模模型的准确性对估计精度起着关键作用,因此实时调整系统模型方法是下一步的研究方向。
参考文献:
[1] 肖雪峰. 锂电池荷电状态(SOC)自适应卡尔曼滤波估算及实现[D]. 株洲:湖南工业大学,2014.
[2] 张玉晖. 基于改进强跟踪滤波器的锂电池SOC估计算法的研究[D].天津:天津大学,2012.
[3] 孙婷. 基于状态噪声去相关卡尔曼滤波的视频目标跟踪技术研究[D].南京:南京理工大学,2009.
[4] 何灵娜. 基于卡尔曼滤波的动力电池SOC估计算法设计[D].杭州:浙江工业大学,2014.
