大型河工模型分布式表面流场测量系统研制及应用
2018-03-16夏云峰黄海龙周良平
陈 诚, 夏云峰, 黄海龙, 王 驰, 金 捷, 周良平
(南京水利科学研究院 水文水资源及水利工程科学国家重点实验室, 江苏 南京 210029)
在河工模型试验中,采用粒子图像测速技术(PIV,Particle Image Velocimetry)测量表面流场,可以获取河流泥沙工程中的流速分布信息,从而对河流水动力结构进行研究,为工程方案提供科学依据,该技术已广泛应用于河工及港工模型大范围瞬时表面流场的测量[1-4]。河工模型试验中的PIV技术与水槽试验中的常规PIV技术的区别主要在于:①测量区域比常规PIV大得多,通常摄像头架设的位置离测量区域较远,为了满足图像处理的要求,所采用的示踪粒子粒径较大;②照明系统通常采用普通光源(甚至可以是自然光)照明,而常规PIV需要专门的激光片光源进行照明。
目前表面流场测量系统能够多次自动测量大范围的表面流场,较好地解决模型试验的流场测量问题,但也存在需要进一步改进的地方:如安装及标定过程较复杂;布线麻烦;测量过程中需对每个通道的图像进行手动阈值调整;流场错误矢量剔除费时费力。为了解决上述难题,本文研制了一种新型分布式表面流场测量系统,并成功应用于模型试验研究。
为了分析研究模型试验中的粒子图像测速技术,便于不断完善和提升表面流场测量系统的各项性能指标,从而促进河流泥沙科学研究水平不断提高,有必要研究表面流场测量系统测量精度的检测方法。示踪粒子跟随性、摄像机分辨率、镜头畸变、安装高度、图像采集时间控制精度及流场提取算法等都直接影响系统测量精度,在流场系统实际使用过程中,粒子图像跟踪算法(PTV,Particle Tracking Velocimetry)中粒子图像阈值及PIV互相关算法中相关窗口大小的确定也会直接导致测量误差[5-9]。目前常用的检测方法主要是在模型试验中使用常用的流速仪包括旋桨流速仪、ADV声学多普勒流速仪等进行对比测量,但这些流速仪都需要放置于一定水深才能测量,无法直接测出表面流速,会直接影响检测结果。为了解决上述问题,提出了一种对模型试验中粒子图像表面流场测量系统进行精度检测的新方法。
1 分布式表面流场测量系统研制
1.1 研制原理
基于粒子图像测速技术(PIV)研制大范围表面流场测量系统。采用千万像素高清智能一体化工业摄像机,通过无线网络与电脑连接,采用互相关算法[10-11]进行粒子图像匹配来计算表面流场,应用粒子图像跟踪算法(PTV)[12-13]测量粒子迹线并生成动态可视化流迹线,结合流体力学连续性原理对流场中错误矢量进行剔除。系统可同步测量大范围多通道的表面流场及流迹线,具有较高的测量效率和精度,适用于大型物理模型试验表面流速分布的测量。
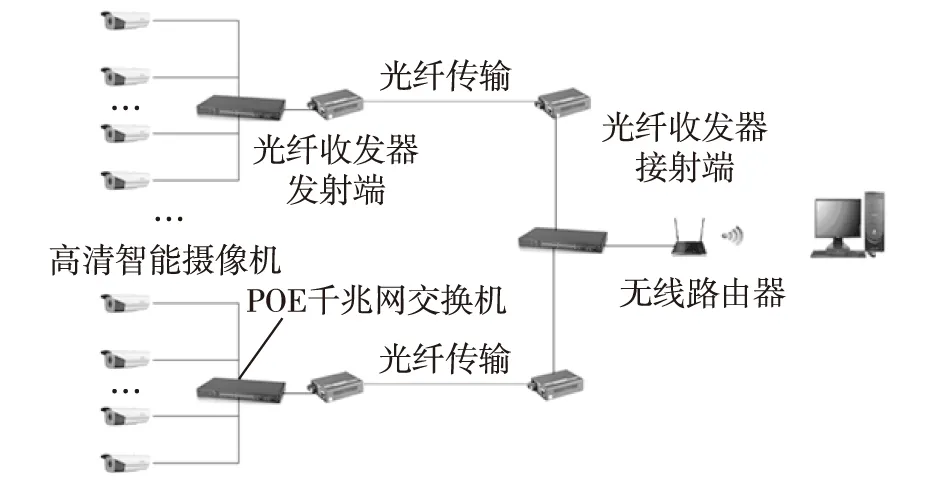
图1 系统组网示意Fig.1 Schematic diagram of system networking
1.2 硬件系统组成
系统采用局域网组网与光纤传输相结合,如图1所示,通过POE(Power Over Ethernet)千兆交换机与高清智能一体化工业摄像机相连,供电同时传输图像,完成摄像机局域网组网后,通过光纤收发器进行长距离图像传输,满足远距离、高速、高宽带的快速以太网工作的需要,达到长距离的高速远程互连。然后通过交换机与无线路由器传输,实现计算机终端的无线连接。由于采用了POE供电,显著降低了布线复杂度,系统传输距离远,布设简单,集成度高,可扩展性强。
采用1 200万像素高分辨率智能一体化工业摄像机,图像分辨率4 000×3 000像素,配置红外自动增益,自适应光线调节,自动变焦(2.8~12 mm),安装高度12 m,终端拍摄范围为20 m×18 m。
可实时拍摄彩色高清照片,配置红外自动增益,自适应光线调节,背光补偿,数字宽动态,特别适用于大型河工模型长时间测量,自动消除光线变化影响。标准型工作温度-30℃~60℃,一体化IP67防护等级护罩,有效解决模型试验中温度、湿度等问题,保证系统长期稳定运行。另外,支持智能化嵌入图像处理算法,显著提高图像处理速度,可保证多通道瞬时同步采集。
智能一体化工业摄像机具有千兆网接口,并采用POE供电,通过POE千兆网交换机,仅用一根网线便可同时完成图像传输和摄像机供电,无须另外再配供电线路,显著降低了布线的复杂度,扩展简单,节能环保。另外,在摄像机上设置了水准气泡,在安装过程中可以方便、快速准确地将摄像机调成水平,在标定过程中每个摄像机拍摄范围内只需要选择2个标定点即可完成图像坐标与模型坐标的转换。

图2 可视化全自动采集Fig.2 Visual and automatic acquisition
1.3 软件系统功能
软件系统基于Visual Studio平台,结合数字图像处理技术与河流动力学理论,主要包括图像采集模块、图像处理模块及流场数据后处理模块。主要功能如下:
(1)可视化全自动采集:无需手动设置图像阈值等进行粒子识别,采集时可实时监控多通道粒子分布情况。采用互相关算法与流体力学基本理论相结合,自动进行粒子匹配,同步采集大范围多通道的流场数据,如图2所示。
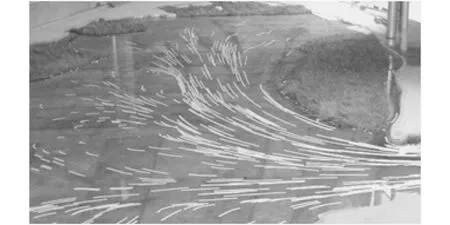
图3 迹线可视化Fig.3 Streamline visualization
(2)采用可视化错误矢量剔除方法:基于流体连续性原理,选择局部流场区域,通过滑动条控件调整流速大小及方向阈值,超过此范围的流速矢量自动差别为错误矢量,进行实时突出显示后可直接剔除,处理速度快。并可进行网格插值、断面流速插值、定点插值等,数据后处理快速方便。
(3)流场数据可直接导出为TXT,CAD,TECPLOT和BMP等多种格式,可生成流场等值线图、流线等。
(4)采用粒子跟踪图像处理算法,识别并提取粒子图像,动态地叠加到背景图像,生成动态可视化流迹线图像及视频,如图3所示。
2 系统精度检测方法
模型试验中水流运动通常较为复杂,在边界突变等情况下容易产生旋转流等,为了尽量接近模型试验中真实流动情况,同时便于提取对比测量数据,设计匀速旋转平台来模拟水流运动。用计算机精确生成随机粒子图像(粒子大小与分布可调),然后打印固定在旋转平台上,以恒定的角速度ω旋转来模拟模型试验中表面流场的粒子运动。由于旋转平台上的粒子是由计算机精确生成,在平台的坐标位置可以精确测定。将表面流场测量系统摄像机拍摄的平台中心与平台中心精确对应,旋转平台上任意位置的速度大小可通过v=ωr精确测定,速度方向为该点的切线方向。将表面流场测量系统实测流场数据与旋转平台精确值进行对比,便可直接测出系统测量误差。

图4 检测装置组成Fig.4 Composition of detection device
检测装置主要包括:圆形旋转平台、步进电机、控制器、传动机构等(见图4)。圆形旋转平台为直径30 cm的光滑平整铝制转盘。步进电机分辨率为0.001°,最大转速可达50°/s。驱动模式采用蜗轮蜗杆结构,传动比为90:1。旋转轴系采用多道工艺精密加工而成,配合精度高。转盘刻度圈是激光刻划标尺,方便初始定位和读数,采用精密研配的蜗轮蜗杆结构,可以任意正向和反向旋转且空回极小。步进电机和蜗杆通过弹性联轴节连接,传动同步,消偏性能好,大大降低了偏心扰动且噪音小。控制器总是工作在4种状态之一:自动状态、手动状态、程序编辑状态、参数设定状态。控制器通电后,控制器处于手动状态且坐标值自动清零,可进行手动/自动模式切换,设置旋转速度、旋转时间、旋转方向等参数。
系统检测时,将旋转平台旋转在拍摄图像中心位置,分别设置旋转平台旋转速度为1,5,10,20和30°/s,在平台平稳运行过程中使用表面流场系统进行测量,保存测量数据;为了检测系统的畸变校正性能,可在拍摄图像中心位置与图像边缘间分别放置旋转平台进行检测。为了检测系统在不同高度的测量性能,可变换安装高度进行检测。经过多次检测,研制的表面流场测量系统测量误差小于5%。
3 系统应用
将研制的分布式表面流场测量系统应用在长江河口段模型中,用于常熟港区规划模型试验研究,系统安装了30个高清智能一体化摄像机,其布置见图5。
图6为测得的工程河段流场。由图6可见,流场图反映了工程河段的落急流场情况,以及该工程河段滩槽的流态分布规律。根据系统测得的粒子数据计算工程河段指定点的表面流速过程线,进而可分析工程实施前后流速过程变化、涨落急流速或平均流速的变化,模型验证时则可以用来验证模型测点与原型实测测点的流速相似性。在试验过程中,选取了6个流速测点进行了对比验证,由图7可见,系统测得的流速数据,与原型实测数据相比,各流速测点的流速过程线模型与天然吻合程度较好,既表明表面流场测量系统测量流速具有较高精确性,又表明了模型与原型有较好相似性。
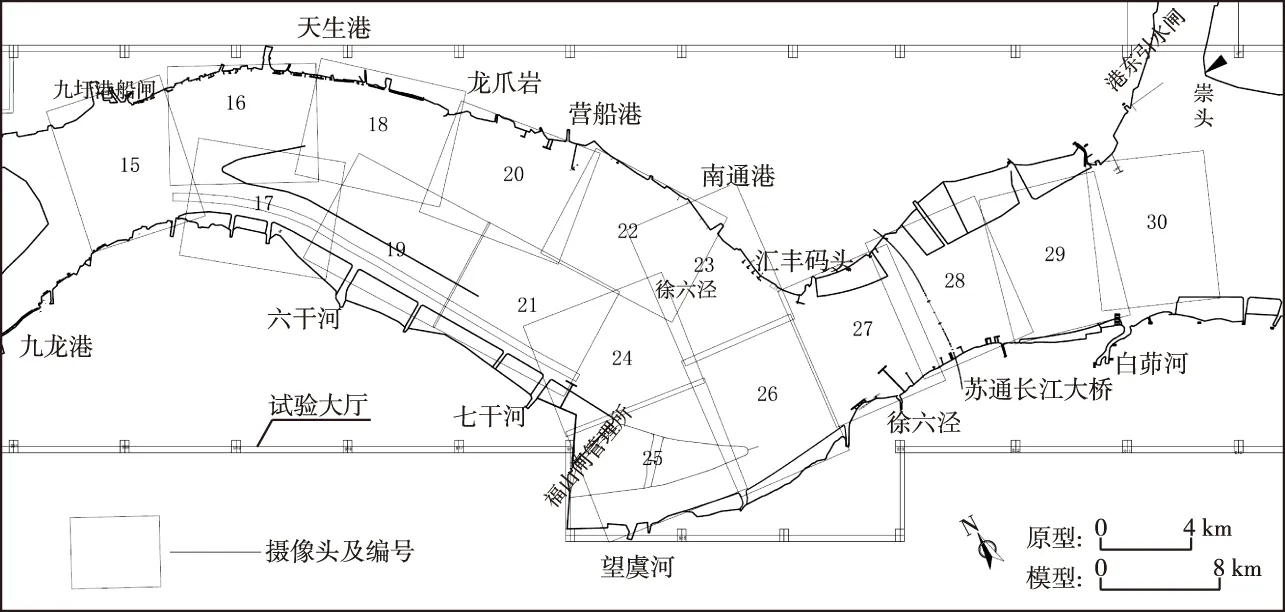
图5 长江河口段模型中摄像机布置Fig.5 Camera placed in Yangtze River estuary model

图6 表面流场测量系统测得的工程河段流场Fig.6 Flow field of engineering reach measured by surface flow measurement system
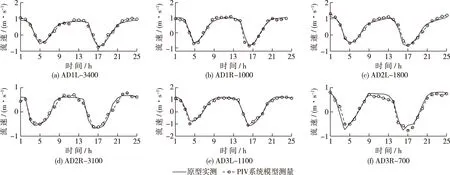
图7 模型试验流速验证Fig.7 Flow velocity verification in model tests
4 结 语
(1)本文研制了一种分布式表面流场测量系统,该系统采用局域网组网与光纤传输相结合,通过POE千兆交换机与高清智能一体化工业摄像机相连,显著降低了布线复杂度,系统传输距离远,布设简单,集成度高,可扩展性强,并在长江河口段模型等多个大型河工模型中得到了成功应用。
(2)设计制作了一种对模型试验中粒子图像表面流场测量系统进行精度检测的检测装置,通过精确控制匀速旋转平台模拟水流运动,可将流场测量系统实测数据与旋转平台上各点精确数据进行对比检测,通过多次检测,研制的表面流场测量系统测量误差小于5%。
(3)该系统精度检测方法是基于示踪粒子完全跟随水流运动的情况下进行检测的,没有考虑示踪粒子跟随性对系统测量误差的影响,在今后的工作中需进一步补充完善。
[1] 唐洪武. 复杂水流模拟问题及图像测速技术的研究[D]. 南京: 河海大学, 1996. (TANG Hongwu. Research on complex flow simulation and image velocimetry[D]. Nanjing: Hohai University, 1996. (in Chinese))
[2] 王兴奎, 庞东明, 王桂仙, 等. 图像处理技术在河工模型试验流场量测中的应用[J]. 泥沙研究, 1996(4): 21-26. (WANG Xingkui, PANG Dongming, WANG Guixian, et al. Application of image processing technics to velocity field measurement in physical model[J]. Journal of Sediment Research, 1996(4): 21-26. (in Chinese))
[3] 田晓东, 陈嘉范, 李云生, 等. DPIV技术及其应用于潮汐流动表面流速的测量[J]. 清华大学学报(自然科学版), 1998, 38(1): 103-106. (TIAN Xiaodong, CHEN Jiafan, LI Yunsheng, et al. DPIV technique and its application of velocity measuring tidal flow[J]. Journal of Tsinghua University (Sciences Technological), 1998, 38(1): 103-106. (in Chinese))
[4] 唐洪武, 陈诚, 陈红, 等. 实体模型表面流场、河势测量中图像技术应用研究进展[J]. 河海大学学报(自然科学版), 2007, 35(5): 567-572. (TANG Hongwu, CHEN Cheng, CHEN Hong, et al. Review of image processing technique applied to measurement of surface flow field and river regime of physical model[J]. Journal of Hohai University(Natural Sciences), 2007, 35(5): 567-572. (in Chinese))
[5] 吴龙华, 严忠民, 唐洪武. DPIV相关分析中相关窗口大小的确定[J]. 水科学进展, 2002, 13(5): 594-598. (WU Longhua, YAN Zhongmin, TANG Hongwu. Determination of the correlation window sizes in correlation analysis of DPIV[J]. Advances in Water Sicence, 2002, 13(5): 594-598. (in Chinese))
[6] SUTARTO T E. Application of large scale particle image velocimetry (LSPIV) to identify flow pattern in a channel[J]. Procedia Engineering, 2015, 125: 213-219.
[7] KANTOUSH S A, SCHLEISS A J. Large-Scale PIV Surface Flow Measurements in Shallow Basins with Different Geometries[J]. Journal of Visualization, 2009, 12(4): 361-373.
[8] FOX J F, PATRICK A. Large-scale eddies measured with large scale particle image velocimetry[J]. Flow Measurement and Instrumentation, 2008, 19(5): 283-291.
[9] FUJITA I, KUNITA Y. Application of aerial LSPIV to the 2002 flood of the Yodo River using a helicopter mounted high density video camera[J]. Journal of Hydro-Environment Research, 2011, 5(4): 323-331.
[10] SHI S, CHEN D. The development of an automated PIV image processing software—SmartPIV[J]. Flow Measurement and Instrumentation, 2011, 22(3): 181-189.
[11] CHIN D, SANG J L. Evaluation of recursive PIV algorithm with correlation based correction method using various flow images[J]. KSME International Journal, 2003, 17(3): 409-421.
[12] TANG H W, CHEN C, CHEN H, et al. An improved PTV system for large-scale physical river model[J]. Journal of Hydraulics, 2008, 20(6): 669-678.
[13] NEZU I, SANJOU M. PIV and PTV measurements in hydro-sciences with focus on turbulent open-channel flows[J]. Journal of Hydro-environment Research, 2011, 5(4): 215-230.
