光电伺服系统传感器精度补偿方法研究*
2018-03-16丁海锦贺文涛
丁海锦,贺文涛
(北京遥感设备研究所 随动控制研究室,北京 100854)
0 引言
伺服系统广泛应用于军事和工业生产中,可以通过闭环控制使被控对象准确、快速复现输入信号的指令。
伺服系统角位置通过传感器测得,并通过角位置编码器将测得的位置信号反馈到控制器中。因此,传感器的测量精度对伺服系统的整体性能有重要的影响。常用的角度测量元件有电位计、差动变压器、自整角机、旋转变压器和感应同步器等,其中旋转变压器因其体积小、稳定性好、寿命长等优点广泛应用于伺服系统中。旋转变压器同普通变压器一样具有一次侧和二次侧,当在一次侧施加一定频率和幅值的交变电压时,二次侧产生的电压信号与定子、转子的相对角位置有关,利用此原理可以进行角度的测量。
一般而言,角度测量元件的价格与其测量精度成正比,传感器测量精度越高,伺服系统的整体价格也会相应提高。而角度传感器的测量误差由两部分构成,一是传感器的固定误差,二是测量的随机误差。通过对传感器的位置精度进行多次测量,对固定误差部分进行建模和描述,寻找大致的误差函数,并对角度测量值进行补偿,可以在不增加成本的情况下提高传感器的测量精度[1-2]。
1 旋转变压器测角原理
图1所示为典型的单轴伺服系统的控制框图,其中包括控制器、功率放大、电机输出、角位置测量等环节[3-6]。
旋转变压器利用输出电压随转子机械转角的变化规律来进行角度的测量。如图2所示,转子绕组输入的激磁电压为

图1 典型伺服系统结构Fig.1 Structure of classical servo system
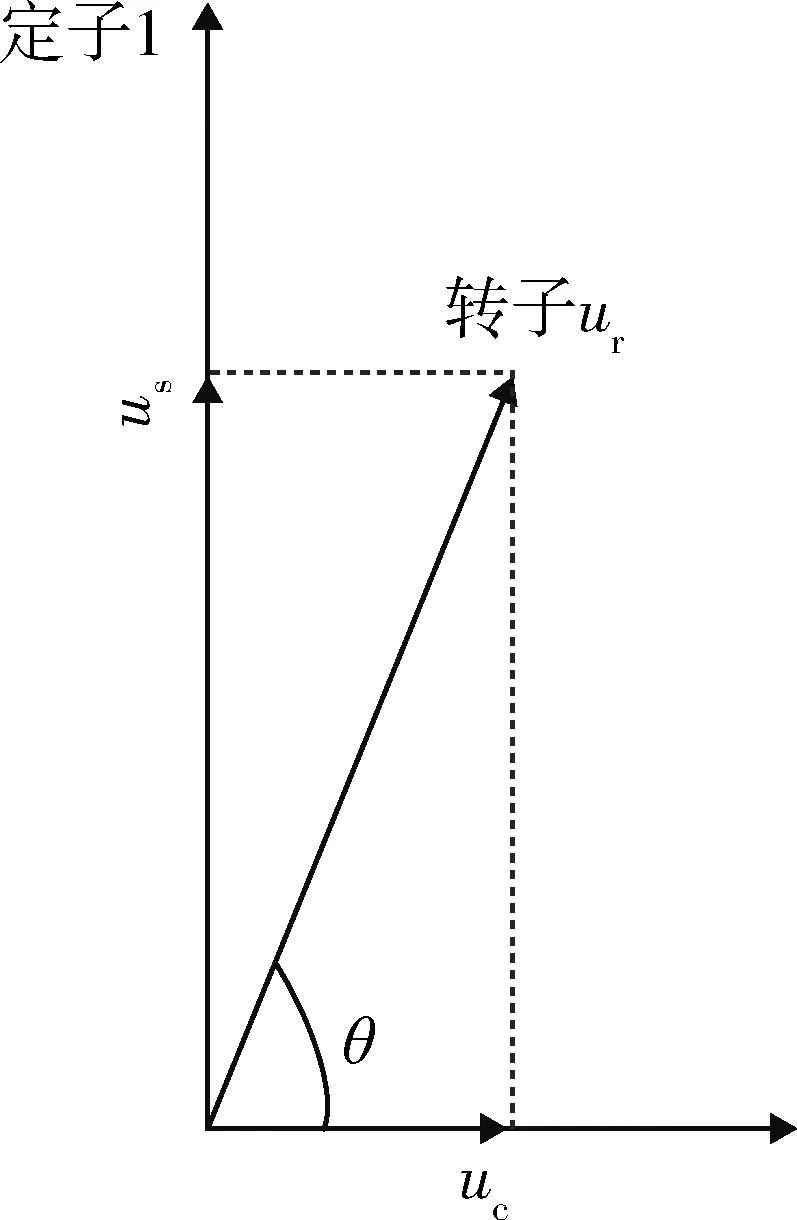
图2 旋转变压器测角原理Fig.2 Diagram of measuring principle of resolver
(1)
两定子绕着输出的正、余弦电压为
us=Umsin(ωt)sin(Pθ),
(2)
uc=Umsin(ωt)cos(Pθ),
(3)
式中:Um为正、余弦绕着感应交流电压的幅值;θ为转子机械角;P为极对数。由此可求得θ
(4)
2 旋转变压器测角误差分析
旋转变压器的测量误差主要由2部分构成,即制造工艺水平引起的误差和硬件解码方式造成的误差。其中旋转变压器转子两相绕组在槽内的位置不对称、两相绕组线圈电阻的差异,都会导致正、余弦两相绕组输出电压幅值存在差异;铁芯的齿槽分度不好、制造工艺水平有限,会导致正、余弦两相绕组存在非正交性。
实际中,若正弦绕组的输出电压为
us=Umsin(ωt)sin(Pθ),
(5)
余弦绕组的输出电压可表示为
uc=(Um+ΔU)sin(ωt)cos(Pθ+Δθ)
,
(6)
式中:ΔU为输出信号电压偏差值;Δθ为两相绕组正交偏差角。
如图3所示为旋转变压器的角度跟踪模型,其中Pθ′=Pθ+ΔΩ,θ′为旋转变压器的实际输出角,ΔΩ为输出信号幅值不对称及空间两相绕组正交偏差所引起的电气误差。在闭环反馈条件下,当跟踪稳定时可得

图3 角度跟踪模型Fig.3 Angle tracking model of resolver
(7)
代入:Pθ′=Pθ+ΔΩ,得
Umsin(Pθ)cos(Pθ+ΔΩ)-(Um+
ΔU)cos(Pθ+Δθ)sin(Pθ+ΔΩ)=0,
(8)
式中:ΔΩ由2部分组成,一部分为ΔU引起的变压比均衡性误差ΔΩp,另一部分为Δθ引起的交轴误差ΔΩq。
令Δθ=0,得
Umsin(Pθ)cos(Pθ+ΔΩp)-(Um+
ΔU)cos(Pθ)sin(Pθ+ΔΩp)=0,
(9)
解得
(10)
(11)
由此可见,输出信号幅值不对称引起的电气误差为2P次谐波误差。
令ΔU=0,得
Umsin(Pθ)cos(Pθ+ΔΩq)-
Umcos(Pθ+Δθ)sin(Pθ+ΔΩq)=0
,
(12)
解得
(13)
简化得
(14)
由此可见,输出绕组非正交引起的交轴误差ΔΩq也是2P次谐波。
综上知,旋转变压器的测量误差主要为2P次谐波[7]。
3 伺服系统传感器精度的测量
精度是传感器测量中准确度和精密度的综合表征,光电伺服系统中的角度测量元件采用旋转变压器,可靠性高,能够适应高温、潮湿等恶劣环境。通过在实验条件下,在原有的控制算法基础上,通过对伺服系统等间隔地输入不同的指令角,测量其实际输出角,通过多次测量,统计旋转变压器的测量误差。当测量范围为[-12°,12°]时,测量结果如图4所示。
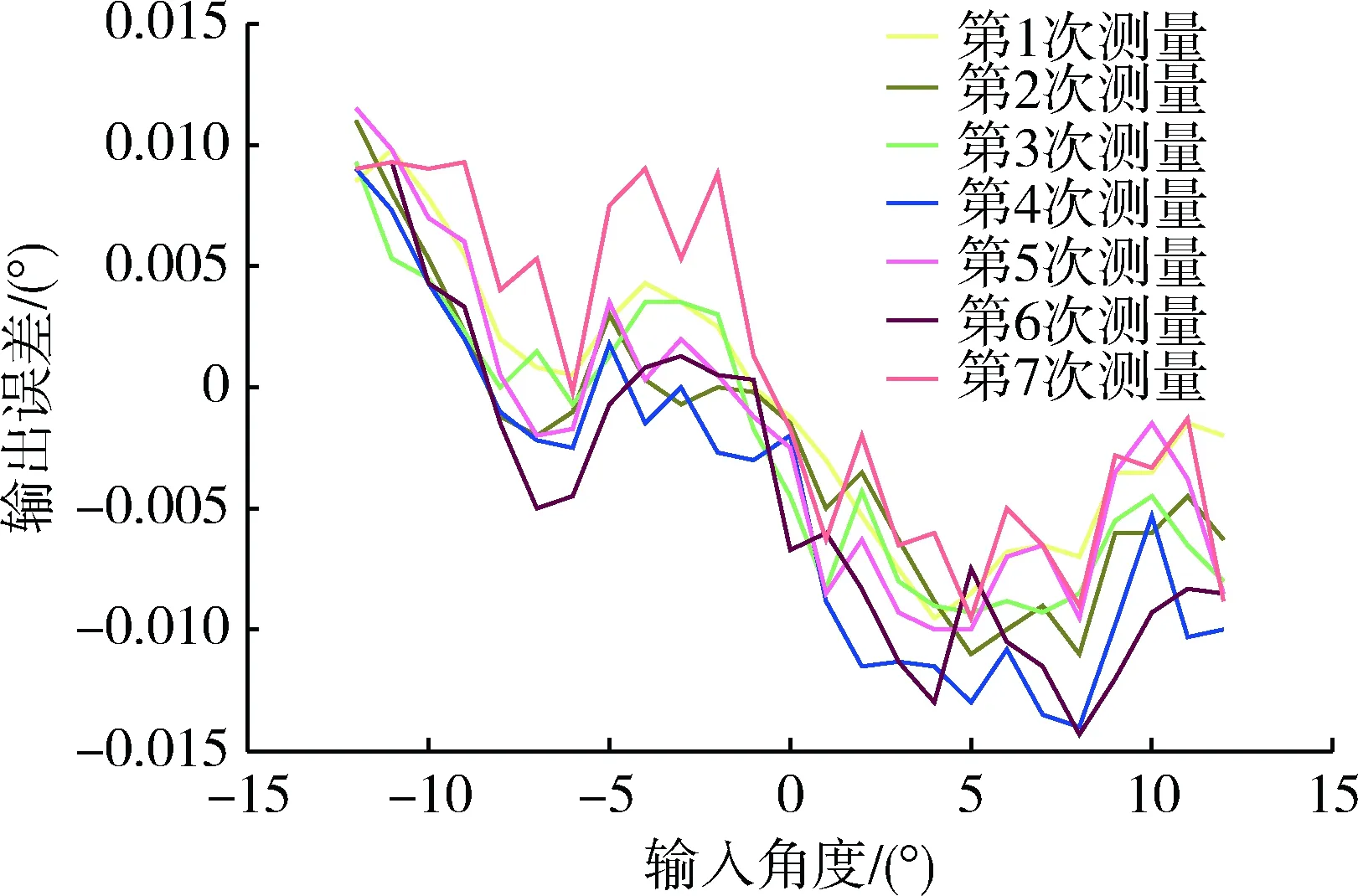
图4 旋转变压器误差测量曲线 Fig.4 Error curve of resolver
从伺服系统误差多次测量结果可以看出,旋转变压器测量的固定误差具有明显的规律性,根据测量结果,适当地对控制量进行补偿,可以弥补传感器的测量固定误差,提高伺服系统的控制精度。由于误差曲线具有明显的三角函数特征,可以通过多项式拟合和傅里叶分解等方法进行补偿。工程上为了缩短计算时间,提高伺服系统的快速性,可以通过查表法对角度控制量进行补偿。
4 利用插值—多项式拟合对传感器精度进行补偿
4.1 常用的插值方法
在实际测量中,通过对光电伺服系统输入不同的角度测量值,测量其实际输出值。对测量数据进行插值,常用的插值方法有拉格朗日插值、牛顿多项式插值和样条插值等方法。
其中,样条插值的离散化数据来源包括以下3种:
(1) 根据原始曲线方程计算出坐标点;
(2) 由实验方式取得;
(3) 由测绘方法取得。
若函数S(x)∈C2[a,b],且在每个小区间[xj,xj+1]上是三次多项式,其中a=x0 S(xj)=yj,j=0,1,…,n, 则称S(x)为三次样条函数。 若S(x)在区间[a,b]上四阶导数连续,则S(x)为五次样条函数。 在多项式拟合中,由于传感器误差测量中输入指令角的间隔为1°,可以对误差测量结果进行样条插值和多项式拟合,实现补偿效果。当插值间隔为0.25°,多项式次数为五次时的补偿效果如图5所示。 图5 N=5,d=0.25时误差补偿效果Fig.5 Error compensation results when N=5, d=0.25 查表法因其方法简单、计算量小,广泛地应用于工程实践中,具有较好的效果。在伺服系统的改进中,对不同指令角范围内的误差进行量化,计算出该范围内对应的误差补偿值,设计误差补偿表,在实际工作中通过查表的方法对旋转变压器的测量误差进行补偿。 基于多项式拟合的补偿结果,对各离散的测量值之间进行一次线性插值,可以求得各区间内的一次补偿函数: xi=-12,-11,…,0,1,2,…,12,i=1,2,…,25. 当xi≤x≤xi+1时,补偿量为 (15) 由于查表法基于多项式拟合的补偿结果,不改变在测量整数值处的补偿效果。将五次多项式插值转化为分段一次线性插值,在伺服系统实际控制中,采用查表的方法,对控制指令所在区间内用一次函数进行补偿,在保证补偿精度的同时,计算量大大简化,执行周期数远少于多项式插值补偿。 由于误差测量结果具有三角函数的变化规律,故可以通过傅里叶分解的方法求得传感器误差的主要部分,并将其作为补偿量对控制量进行补偿。 对于如图4所示的传感器误差测量曲线,具有明显的正弦曲线特性(如图6所示),利用Matlab软件对其进行傅里叶分解,求解出其低频的傅里叶分量为 y=a0+a1cosω+b1sinω+a2cos 2ω+ b2sin 2ω+a3cos 3ω+b3sin 3ω. 用此函数对测量误差进行补偿,结果如图7所示。 如图8所示,如果测量误差具有典型的正弦函数特性,原始误差为[-2°,+2°]的传感器经过傅里叶分解的方法进行补偿后,测量误差大幅减小,理想条件下具有很好的补偿效果[8-15]。 如图9所示,在实际中应用傅里叶分解法对光电伺服系统的传感器进行补偿,也能达到一定的补偿效果。 图6 理想条件下误差曲线Fig.6 Error curve in ideal condition 图7 利用傅里叶分解求得补偿曲线Fig.7 Error compensation curve using Fourier progressional dissolution 图8 补偿后的误差曲线Fig.8 Error curve after compensating 图9 利用傅里叶分解对传感器补偿后的测量误差曲线Fig.9 Error compensation results using Fourier progressional dissolution 通过应用不同阶次、不同插值间隔的多项式拟合方法、查表法和傅里叶分解法对光电伺服系统的传感器测量精度进行补偿,发现各种补偿方法在补偿准确度和计算时间等方面具有较大的差异,现比较如表1所示。 表1 不同方法补偿效果对比表 综上所述,采用多项式拟合、查表法和傅里叶分解等方法都能实现传感器测量精度补偿。其中,采用多项式拟合的执行周期数随着拟合函数阶数的增加而增加,采用不同的插值间隔也会影响补偿效果,综合这2个因素的影响,当N=5,D=0.25时的补偿效果最优。采用傅里叶分解的方法也能达到一定的补偿效果,但由于传感器的测量误差曲线与理想情况相差较远,实际的补偿效果有限,而且该方法的执行周期数远高于多项式拟合。查表法基于最优的多项式补偿效果,能够保证补偿后的测量精度,同时执行周期数也远低于其他方法,具有很好的工程实用性。 [1] Robert W Mitchell,Jay Marchetti.Improved Position Accuracies of Multi-Axis Motion Test Simulators[R].AIAA 2006-6361. [2] 孙华丽,张政治,胡思才.五次样条插值在GPS卫星轨道标准化中的应用[J].大地测量与地球动力学,2012,32(1):76-79. SUN Hua-li,ZHANG Zheng-zhi,HU Si-cai.Application of Quintic Spline Interpolation to GPS Satellite Orbit Standardization[J].Journal of Geodesy and Geodynamics,2012,32(1):76-79. [3] 李明.导引头捷联稳定技术的研究及应用[D].北京:中国航天科工集团公司二院,2010:25-30. LI Ming.Study on the Stabilization of Seeker Servo System[D]. Beijing:The Second Academy of CASIC,2010:25-30. [4] 陈国栋.双T滤波器在导引头伺服系统中的应用技术研究[D].北京:中国航天科工集团公司二院,2014:80-81. CHEN Guo-dong.Study on the Application of Notch Filter in Seeker Servo System[D].Beijing:The Second Academy of CASIC,2014:80-81. [5] 贺文涛.结构非线性对伺服系统性能影响的研究[D].北京:中国航天科工集团公司二院,2012:78-79. HE Wen-tao.Study on the Influence of Structural Nonlinear on Mechanical Servo System[D].Beijing:The Second Academy of CASIC,2012:78-79. [6] 文哲.捷联伺服系统稳定与跟踪技术的研究[D].北京:中国航天科工集团公司二院,2013:2-4. WEN Zhe.Study on the Stabilization and Tracking Technology of Mechanical Servo[D].Beijing:The Second Academy of CASIC,2013:2-4. [7] 帅浩.基于旋转变压器的角位移测量技术研究[D].太原:中北大学,2015. SHUAI Hao.Study on Angular Displacement Measurement Technology Based on Resolver[D].Taiyuan:North University of China,2015. [8] 李庆扬,王能超,易大义.数值分析[M].北京:清华大学出版社,2008. LI Qing-yang,WANG Neng-chao,YI Da-yi.Numerical Analysis[M].Beijing:Tsinghua University Press,2008. [9] Robert W Mitchell,Jay Marchetti.Improved Position Accuracies of Multi-Axis Motion Test Simulators[C]∥AIAA Modeling and Simulation Technologies Conference and Exhibit 21-24,AIAA 2006-6361,August 2006. [10] Michael A Warden,Robin Hauser,Peter Hofstetter,et al.Keeping up with Dynamics of Next Generation Missiles[C]∥SPIE Vol 6942,694203,2008. [11] 潘承洞.Spline函数的理论及其应用[J].数学的实践与认识,1975(3):64-75. PAN Cheng-dong.Theory and Application Spline Function[J].Mathematics in Practice and Theory,1975(3):64-75. [12] 廖良闯,徐大林,程蜀炜,等.一种提高全数字式RDC系统输出实时性的方法[C]∥2008江苏自动化学会学术年会论文集. LIAO Liang-chuang,XU Da-lin,CHEN Shu-wei,et al.A Method of Enhanced Real-Time Characteristic about Output of Complete-Digital RDC System[C]∥Jiangsu Automation Research Institute of CSIC,2008. [13] Louis A DeMore,Paul R Mackin,Michael Swamp,et al.Improvements in Flight Table Dynamic Transparency for Hardware-in-the-Loop Facilities[C]∥Proceedings of SPIE,2000,4027,0277-786X:101-112. [14] Michael Swamp,Colin Stevens,Peter Hoffstetter.Improvements in Transient Fidelity of HWIL Flight Tables Using Acceleration Feedback[C]∥Preceedings of SPIE,2002,4717,0277-786X:32-45. [15] RUDIN R T.Strapdown Stabilization for Imaging Seekers[R].AIAA-93-2660,1993.
4.2 对旋转变压器角度测量数据进行样条插值,比较补偿效果

5 基于查表法对传感器精度进行补偿
6 基于傅里叶分解对方位通道进行补偿
6.1 理想条件下运用傅里叶分解法对传感器误差进行补偿
6.2 利用傅里叶分解法对光电伺服系统进行位置补偿




7 不同补偿方法比较

8 结束语
