海岸线亚像元定位技术研究进展
2018-03-15陈飞宇胡友彬施恩
陈飞宇,胡友彬,施恩
(国防科技大学气象海洋学院,南京 211101)
0 引言
海岸线是海水与陆地相互交汇的部位,是海岸带的重要标志之一[1]。海岸线作为海岸带测绘、自然灾害监测以及环境要素动态变化趋势研究的一项基础性工作,在海水漫滩运动监测、潮滩地形推算、岛礁检测以及海岸泥沙冲淤分析等方面具有十分重要的研究意义和实用价值。
海岸线的位置受多种因素的影响:一方面,每天海水的潮涨潮落会导致海岸线的短期变化;另一方面,海平面及地壳的升降、海陆的分布变化等会导致海岸线发生长期的变动。海岸线的高度动态性使其难以用静态的数据准确地予以表达[2],因此常规的海岸调查存在着人力物力耗费较大、数据获取不方便、观测周期长等诸多局限性,难以满足实时监测、辅助决策的需要。20世纪90年代以来,随着国际高新技术与信息技术的迅速发展,遥感技术以其观测范围广、条件限制少、观测频度高、节省投资等诸多优点,成为海岸线观测的重要手段。
混合像元是指在传感器的瞬时视场中包含多种地物类别的像元[3](如图1所示),是遥感影像所固有的特征[4]。遥感影像受空间分辨率的限制,其像元大多是混合像元,很少是由单一地物类型构成的纯像元。混合像元的存在对海岸线提取的精度有着重要的影响,边缘检测、遥感分类等经典的海岸线提取方法将混合像元完全归为某一种地物类型,会导致海岸线提取结果误差较大、精度不高。如何对遥感影像中这种广泛存在的混合像元问题进行处理已经成为定量遥感分析中最为关键的问题[5]。
1 海岸线的亚像元定位
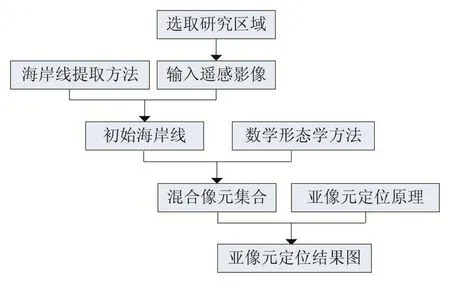
图2 海岸线亚像元定位流程图
从遥感影像的数据源分析来看,低分辨率遥感影像覆盖范围大、获取周期短、成本低、数量多,高分辨率遥感影像覆盖范围小、获取周期长、成本高、数量少。在实际应用过程中,仅仅依靠高分辨率遥感影像,往往难以满足对观测范围、时效性等方面的要求,还需要大量依靠中、低分辨率遥感影像进行海岸线提取,弥补高分辨率图像数据源的不足。具体来说,利用中、低分辨率遥感影像进行海岸线提取主要有以下四个方面的必要性:(1)中、低分辨率的遥感影像(如AVHRR数据、MODIS数据、SPOT数据、Landsat数据等)覆盖范围广(例如,一幅SPOT HRG影像的覆盖范围是IKONOS影像的36倍),更适合大范围的海岸线提取和监测;(2)中、低分辨率遥感影像数据连续性强,空间分辨率较低的遥感影像通常时间分辨率较高[6]。例如,Landsat系列遥感影像能够以30m的空间分辨率定位海岸线,但其重访周期为16天,难以快速、准确地监测到海岸线的变化,而MODIS遥感影像覆盖范围大,每天1-2次的重访周期,能够实现海岸线的连续观测[7];(3)中、低分辨率遥感影像成本较低,文献[8]提到,即便是高分辨率遥感影像衍生出的初等图像产品通常也要花费$20/km2,处理程度更高的产品价格可能还要高出几倍,而空间分辨率稍低的遥感影像,以SPOT HRG(分辨率为4-10m)为例,仅需$3-5/km2;(4)中、低分辨率遥感影像历史资料丰富,便于进行长期的观测、统计和分析。
在中、低分辨率的遥感影像中,存在着大量的混合像元,这些混合像元严重制约了海岸线的提取精度,亚像元定位是目前解决混合像元问题的常用手段。亚像元定位技术以低分辨率的遥感影像为数据源,以获取高分辨率的地物分类制图为目的,采用亚像元定位原理,确定混合像元中不同地物类型的具体空间分布。因此,亚像元定位也可看作是一种在亚像元尺度上进行硬分类的技术。
对海岸线进行亚像元定位,主要分为三步(如图2所示):首先,通过海岸线提取方法或模型得到初始海岸线;其次,根据水、陆的空间位置关系,利用初始海岸线可初步确定需要进行亚像元定位的混合像元集合;最后,利用亚像元定位方法或模型对混合像元集合中的混合像元进行亚像元定位,最终得到海岸线的亚像元定位结果。对于初始海岸线的提取,可采用阈值分割、边缘检测等硬分类方法,简单易操作。根据水、陆的空间位置关系易知,需要处理的混合像元主要位于水陆交界附近,即初始海岸线的两侧。通过数学形态学中的腐蚀和膨胀操作,可进一步得到以初始海岸线为中心向两侧延展一定宽度的带状区域,该带状区域中的像元即被认为是需要处理的混合像元集合。最后,利用亚像元定位原理对该带状区域中的混合像元进行亚像元定位,即可得到海岸线的亚像元定位结果图。
如图3所示,图3(a)中的研究区域是一个小岛,提取初始海岸线后,将得到的二值化图像进行膨胀和腐蚀,中间的带状区域(图3(b))即为需要进行亚像元定位的混合像元的集合,再根据海陆之间的空间关系,易知混合像元带状区域往里的部分是纯陆像元的集合,往外的部分是纯水像元的集合。
2 海岸线亚像元定位方法分类
根据不同的分类标准,亚像元定位技术有不同的分类方法:
(1)根据输入数据类型的不同,亚像元定位技术可分为以丰度图像作为输入数据的方法和以遥感影像作为输入数据的方法两类(如表1所示)。以丰度图像作为输入的方法可以看作是混合像元分解和软分类技术的后处理过程[9],是利用各地物类型的组分约束进行亚像元定位的方法。相关算法包括像元交换算法、亚像元/像元吸引力模型、遗传算法、基于SPM的Hopfield神经网络、线性优化、基于SPM的插值方法和基于学习的SPM算法。这类方法过度依赖混合像元分解或软分类的结果,丰度图像的误差不可避免地传递到亚像元定位结果中[10]。直接将遥感影像作为输入数据的方法,是利用光谱约束进行亚像元定位的方法。相关算法包括基于SPM的马尔科夫随机场法、基于SPM的线性分解模型和基于SPM的模糊C均值法。这类方法不受限于混合分解模型和软分类结果的精度,应用更为广泛。

表1 不同输入数据类型的对比
(2)根据空间模式信息分类,亚像元定位方法可分为两类:一是仅考虑地物之间的空间相关性。由空间相关性原理可知,空间上接近的地物相较于空间距离较远的地物关联程度更高,属于同一种地物类型的可能性也更高。因此,即便不知道地物空间分布的任何具体信息,地物的分布也不是随机的,而是存在着一定的空间相关性,将这种空间相关性最大化即可得到一种可能的地物空间分布。二是通过辅助数据获取更小尺度上的先验空间分布信息。亚像元定位是一个欠定反演问题,其约束条件远远少于求解参数,因此满足约束条件的求解可能很多,定位结果不稳定、不唯一,定位精度受到限制。利用辅助训练数据,能够得到先验的空间模式信息,进而引导各类地物按照先验的空间模式进行分布,以此提高亚像元定位结果的准确性。目前,常用的辅助数据包括全色波段图像、高程数据、矢量边界、高分辨率遥感影像和LIDAR数据等。
(3)根据地物尺寸与像元分辨率之间的大小关系,遥感影像分为H型(地物尺寸大于像元分辨率)和L型(地物尺寸小于像元分辨率)两种(如表2所示)。在H型遥感影像中,混合像元大多出现在地物相交的边界区域,这时地物空间分布特征一般可用空间相关性最大来描述。在L型遥感影像中,不同地物斑块零散地分布于遥感影像的像元内部,在得到混合像元分解结果后,如果仍然采用空间相关性最大作为亚像元定位的目标,其结果必然使相同地物类型聚集在一起,不能准确描述地物空间分布特征。在这种情况下,不能再利用空间相关性原理进行亚像元定位,需要获取更多的先验信息来确定像元中地物的空间分布,比如周长、面积、距离、形状等结构参数,然后通过空间模式拟合的方法进行亚像元定位。地统计学方法通过描述各种地物空间结构来进行亚像元定位,已经得到了广泛应用,主要包括半变异函数模型、两点直方图法和随机模拟方法等。

表2 依据地物尺寸与像元分辨率关系分类的亚像元定位方法比较
(4)根据求解过程分类,亚像元定位方法可分为直接求解和迭代求解两种。直接求解在计算过程中不需要经过多次迭代,而是直接确定每个亚像元的地物类别,主要算法包括线性规划、吸引度排序以及Ge等人[11]提出的根据端元组分直接定位的方法。直接求解的方法不需要迭代计算,算法效率高,运行速度快。与直接求解算法不同,迭代求解一般首先随机初始化亚像元定位制图,然后通过相应的规则在一次次迭代过程中改变亚像元的地物类型,逐渐达到稳定状态,得到最终结果,相关算法主要包括遗传算法、Hopfield神经网络、正则MAP模型等。除此以外,基于神经网络的亚像元定位模型,包括BP神经网络、模糊ARTMAP神经网络和神经网络/元胞自动机模型,既包含迭代求解过程也包含直接求解过程。在训练阶段,神经网络的权重参数通过不断地迭代计算达到最优;在应用阶段,将遥感影像带入训练好的模型,直接求解即可得到亚像元定位结果。迭代求解的亚像元定位算法通过不断的迭代运算,多次优化,通常能够得到较好的解,但计算代价大,因此运行速度偏慢。
除上述四种分类方法外,根据采用的遥感影像的数目,可分为单幅遥感影像的亚像元定位和多幅遥感影像的亚像元定位;根据SPM模型采用的分类方法,可分为监督分类的SPM模型和非监督分类的SPM模型;根据采用的分类方法的数量,可分为采用单一分类方法的亚像元定位和组合式(多类)分类方法的亚像元定位。
3 研究展望
亚像元定位技术从提出到现在已经经历了近20年的发展,在国内外学者的共同努力下,已经取得了长足的进步,但目前提出的方法都不同程度的存在着一些问题。从目前来看,针对海岸线的亚像元定位技术,未来进一步的研究和发展方向主要有以下几个方面:
(1)亚像元定位是一个欠定反演问题,其约束条件远远少于求解参数,因此满足约束条件的解可能很多,定位结果不稳定、不唯一,定位精度受到限制。为提高模型求解结果的精度,需要获取更多信息来描述混合像元内部各地物类型的空间分布特征。因此,各种分辨率的遥感影像和各种类型的辅助数据将越来越多地应用于海岸线的亚像元定位。
(2)研究表明,相同的中低分辨率遥感影像通过不同的亚像元定位算法可能产生不同的地类分布结果,并且各类算法均有其各自的优缺点,在进行亚像元定位之前确定哪种算法最优十分困难[12]。因此,综合利用多种算法,取长补短,是一种可以尝试的提高海岸线亚像元定位精度的方法。
(3)海岸线有不同于其他地物的特点(如呈线性、动态变化频繁等),如何尽可能多地利用海岸线自身特性,提高定位精度,降低求解难度,是研究重点和关键。
(4)由于亚像元定位是用低分辨率遥感影像得到高分辨率硬分类结果,具有跨尺度的特殊性,制图结果不确定性的影响因素不同关于传统分类,至今尚无公认的精度评价方法[13],如何合理、有效地评价海岸线亚像元定位结果也是未来研究的重点之一。
[1]赵建华.海岸带管理与GIS技术应用[J].海洋开发与管理,2001,18(4):51-56.
[2]刘鹏.海岸线影像特征提取方法与实证研究[D].福建师范大学,2008.
[3]Li X,Ling F,Du Y,et al.A Spatial-Temporal Hopfield Neural Network Approach for Super-Resolution Land Cover Mapping with Multi-Temporal Different Resolution Remotely Sensed Images[J].Isprs Journal of Photogrammetry&Remote Sensing,2014,93(7):76-87.
[4]凌峰,吴胜军,肖飞,等.遥感影像亚像元定位研究综述[J].中国图象图形学报,2011,16(8):1335-1345.
[5]Campbell J B.Introduction to Remote Sensing,3rd Edition[J].Crc Press,2002.
[6]Huang C,Chen Y,Wu J.DEM-based Modification of Pixel-Swapping Algorithm for Enhancing Floodplain Inundation Mapping[J].International Journal of Remote Sensing,2014,35(1):365-381.
[7]Li W,Zhang X,Ling F,et al.Locally Adaptive Super-Resolution Waterline Mapping with MODIS Imagery[J].Remote Sensing Letters,2016(12).
[8]Toutin,T.2009.Fine Spatial Resolution Optical Sensors.In:Warner,T.A.,Nellis,M.D.,Foody,G.M.(Eds.),The SAGE Handbook of Remote Sensing.Sage,London,pp.139-150.
[9]Atkinson P M.Sub-pixel Target Mapping from Soft-Classified,Remotely Sensed Imagery[J].Photogrammetric Engineering&Remote Sensing,2005,71(7):839-846.
[10]Xiaodong Li,Feng Ling,Yun Du.Super-Resolution Mapping Based on the Supervised Fuzzy C-means Approach[J].Remote Sensing Letters,2012,3(6):501-510.
[11]Jin H,Mountrakis G,Li P.super-Resolution Mapping Method Using Local Indicator Variograms[J].International Journal of Remote Sensing,2012,33(24):7747-7773.
[12]Li X,Ling F,Foody G M,et al.Improving Super-Resolution Mapping Through Combining Multiple Super-Resolution Land-Cover Maps[J].International Journal of Remote Sensing,2016,37(10):2415-2432.
[13]K.C.Mertens Corresponding Author,L.P.C.Verbeke,E.I.Ducheyne,et al.Using Genetic Algorithms in Sub-Pixel Mapping[J].International Journal of Remote Sensing,2003,24(21):4241-4247.
