一种高经济性的疲劳驾驶预警系统设计
2018-03-14杨锦岳意娥杨丽莎
杨锦 岳意娥 杨丽莎


摘要:因疲劳驾驶造成的交通事故逐渐增多,疲劳驾驶预警系统研究有着重要的意义和应用价值。本文提出了一种高经济性的疲劳驾驶预警系统没计,该系统使用汽车CAN网络上已有信号进行分析处理并及时预警,只需增加一个疲劳预警系统控制模块,提高了系统经济性的同时也为疲劳驾驶预警系统研究提供了一种新的思路。
关键词:疲劳驾驶;预警系统;高经济性;CAN网络
随着机动车保有量的快速增加以及道路通车里程的逐年增长,大量发生的交通事故给世界各周造成了巨大的财产损失和人员伤亡[1]。在引发交通事故的原因中,疲劳驾驶和酒后驾驶占有很大比例,尤其是疲劳驾驶,已成为令驾驶员头痛的潜在杀手。因此,有效的疲劳驾驶榆测和预警对预防交通事故起着至关重要的作用[2]。
1 疲劳驾驶预警系统定义
疲劳驾驶预警系统是一种时刻监测驾驶员精神状态,一旦驾驶员精神状态下滑或进入浅层睡眠时会给出语音提示、振动提醒等警告指示的主动安全系统。目前,常见的疲劳驾驶预警系统有以下几类[3]:
1.基于计算机视觉系统的通过检测驾驶员瞳孔、眼睑和面部表情等变化来检测疲劳驾驶的系统;
2.基于生理特征的疲劳驾驶检测及预警系统,常见的有脑电图检测、心电图检测、心率变化检测等;
3.基于车辆行驶特征的预警系统,常见有车道偏离报警系统和转向盘监测系统;
4.基于信息融合技术的监测系统,典型的是欧盟进行的名为“AWAKE”的驾驶行为综合监控系统。
本文在基于车辆行驶特征预警系统的基础上,提出了一种使用汽车CAN网络上已有信号进行分析处理并及时预警的疲劳驾驶预警系统。使用该系统,只需增加一个疲劳预警系统控制模块,大大提高了系统的经济性。
2 疲劳驾驶预警系统设计
疲劳驾驶预警系统利用汽车CAN网络已有信号实时分析驾驶员驾驶状态,当系统感知驾驶员疲劳,即发出报警提示驾驶员应当休息。
2.1系统结构
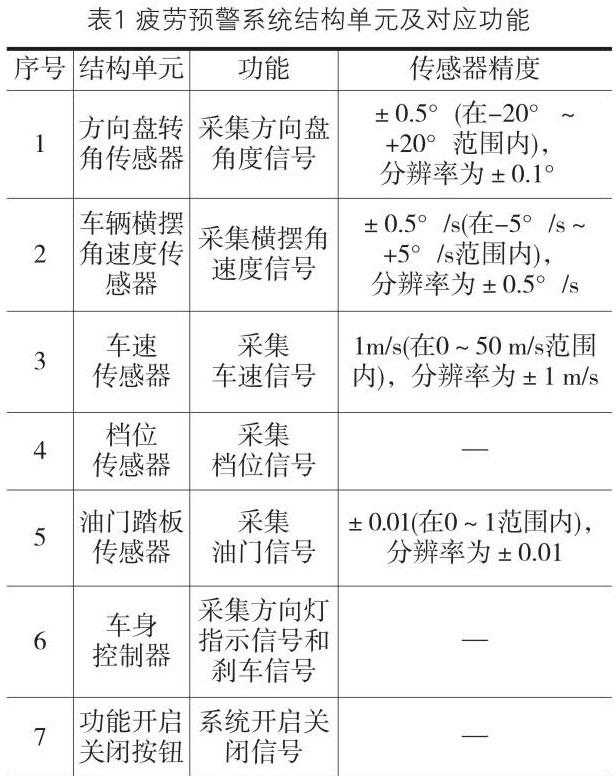
疲劳预警系统由信号采集单元、算法执行单元和系统显示单元组成。其中,信号采集单元包括方向盘转角传感器、车辆横摆角速度传感器、车速传感器、档位传感器、油门踏板传感器、车身控制器和功能开启关闭按钮[4];算法执行单元为疲劳预警系统控制模块;系统显示单元为报警人机界面,具体结构如图1所示:
其中,信号采集单元用于采集所需信号作为疲劳预警系统控制模块输入;算法执行单元用于运行疲劳检测算法,判断驾驶员疲劳状态;系统显示单元用于显示驾驶员疲劳状态,当系统感知驾驶员疲劳时发出报警,提示驾驶员休息。
2.2 信号采集单元
信号采集单元包括方向盘转角传感器、车辆横摆角速度传感器、车速传感器、档位传感器、油门踏板传感器、车身控制器和功能开启关闭按钮。具体传感器及对应功能如表1所示:
信号采集单元将采集到的信号通过CAN总线传送给算法执行单元。
2.3 算法执行单元
算法执行单元即为疲劳预警系统控制模块,用于运行疲劳榆测算法,判断驾驶员疲劳状态。
系统控制模块在初始化之后,将信号采集单元采集到的参数作为输入,执行疲劳检测算法,得到疲劳状态参数值,作为系统控制模块輸出传递到显示单元,具体如图2所示:
2.31 参数输入
疲劳检测算法对输入参数具有数值边界要求,因此在算法运行之初需要对输入信号进行调整,具体的输入参数边界要求如表2所示:
2.3.2算法运行
本论文疲劳检测算法采用的是一种串形结构的多层前向模糊神经网络算法[5],该网络由两部分组成,前一部分为模糊量化部分,后一部分为神经网络部分,图3所示为该模糊神经网络的结构框图:
图3中,第一层为输入层,输入层节点数由输入信号决定。假设输入信号为m个,每一个节点对应一个输入变量si(i=l,2,……,m),则输入向量为S=[s1,s2,……,sm]T。
第二层为量化层,其作用是将输入变量进行模糊量化,即先对输入变量定义一些模糊子集,通过相应的模糊子集上的隶属函数,使输入变量转换成相应的模糊子集上的隶属度,假设对于输入变量si=l,2,……,m)定义了qi个模糊子集,对应于输入变量可以取得qi个模糊隶属度值。对于si在第i个模糊子集上的隶属度函数为:
其中x为si在第j个模糊子集上的隶属度,隶属度函数是
根据对信号的模糊聚类的方法或者依靠经验取得,每一函数都可能不一样。量化层的节点数
量化层的输出向量
第三层为隐含层,其节点数k是在网络学习中根据实际情况来确定的,对于隐含层的第i个节点,设该节点与量化层各节点的连接权向量
则它的输出为:
第四层为输出层,fi(i=1,2,……,n),对于输出层的第i个节点,每一个节点对应一个输出变量,设该节点与隐含层各节点的连接权向量
式中:
Oi为该节点的阈值,g为对数S型(Sigmoid)函数,g
,输出层神经元函数取对数s型函数的目的也是为了使网络输出值落在[O,1]之间,以便进行疲劳诊断。输出层的输出向量为F=
。
由上面四层模糊神经网络,通过神经网络的学习可以实现疲劳驾驶征兆到驾驶状态的映射。
2.3.3参数输出
疲劳检测算法对输出参数也具有数值边界要求,如表3所示。
2.4系统显示单元
系统显示单元用于显示驾驶员疲劳状态,它从算法执行单元接收疲劳状态信号,当疲劳状态信号为1时,表明系统感知驾驶员已疲劳,提示驾驶员应该休息。
系统显示单元由仪表盘指示和声音报警组成:
1.仪表盘指示包含咖啡杯图表和提示语,如图4所示。当没有报警时,报警指示区域可被其它图标占用;当发生报警时,报警指示图标闪烁,频率为2Hz。
2.声音报警为“滴滴”声提示报警。当发生报警时,声音报警启动,频率为500Hz。
3 疲劳驾驶预警系统测试
上文介绍了疲劳驾驶预警系统的设计,为验证疲劳驾驶预警系统的有效性,须对该预警系统进行实车测试,记录驾驶员从清醒驾驶到疲劳驾驶的变化过程,获得测试数据,进行分析验证。
3.1 测试方法及原理
疲劳预警系统的测试方法如下所示:
1.规划测试要求、驾驶路线、驾驶时间以及驾驶场景等内容。
2.使用视频记录仪对驾驶员面部及车辆前方状况进行视频记录。
3.跟车工程师对驾驶员状态进行观察并记录成表格。
4.利用CANcase对车辆CAN信息进行采集。
5.最终结合所记录的视频、驾驶员状态表和CAN信息进行分析,验证疲劳驾驶预警系统有效性。
3.2测试条件
1.测试方法:黑盒测试。
2.测试总里程:1万公里
3.测试T况:
天气条件一雨天、阴天测试时间一早晨、正午、深夜、黄昏
4.测试路况:高速公路为主,圉道为辅;
5.测试人员需求:
测试人员由驾驶员和跟车工程师组成;驾驶员每次驾驶持续4小时;跟车工程师负责调整及记录驾驶员状态
6.测试设备:
装有疲劳驾驶预警系统的测试车辆;可以记录车前及驾驶员状态的视频采集系统;可以采集车辆CAN信息的CANase;
7.测试用例:
从清醒到疲劳:驾驶员开始测试时处于清醒状态,持续4个小时驾驶,观察驾驶员状态及采集数据;
从疲勞到更疲劳:驾驶员开始测试时处于疲劳状态,持续3-4小时驾驶,观察驾驶员状态及采集数据。
3.3测试数据
测试数据包括了驾驶员面部及车辆前方状况记录视频、车辆行驶过程中采集CAN信息和驾驶员状态记录表格,如表4所示。
3.4测试结果
通过分析驾驶员面部及车辆前方状况记录视频和采集到的CAN信息,结合驾驶员状态记录表,可以得出疲劳驾驶预警系统能够及时监测到驾驶员处于疲劳驾驶状态并发出报警,满足设计要求。
4结论
本文在基于车辆行驶特征预警系统的基础上,提出了一种高经济性的疲劳驾驶预警系统设计,创造性地提出使用汽车CAN网络上已有的信号进行分析处理并及时预警,提高了汽车的行驶安全性。使用该方法,只需增加一个疲劳预警系统控制模块,大大提高了系统的经济性,也为疲劳驾驶预警系统研究提供了一种新的思路。
参考文献:
[1]孙显彬,唐洪伟,文妍.疲劳驾驶预警系统的研究现状和发展趋势[J].青岛理工大学学报,2007,2S(3):91-94
[2]孙伟,张为公,张小瑞,陈刚.疲劳驾驶预警系统的研究进展[J].汽车电器,2009,1 4 8
[3]王贞,孙传辉,曹阳,王立辉.基于MEMS技术的疲劳驾驶预警系统设计[J].机电产品开发与创新,2010,23(1):125-126
[4]窭文娟基于LIN总线的疲劳驾驶综合测试系统的研究及设计[D].吉林大学,2006
[5]毛喆.机动车疲劳驾驶行为识别方法研究[D].武汉理工大学,2009