信号交叉口自行车和行人混合交通流社会力模型
2018-03-10王占中赵利英焦玉玲曹宁博
王占中, 赵利英, 焦玉玲, 曹宁博
(吉林大学 交通学院,长春 130022)
0 引 言
在中国,自行车出行非常普遍。自行车通常与行人共用人行横道,但因为自行车与行人的相互干扰,共享人行横道不仅会降低行人的运行效率,而且会威胁行人安全。因此,许多国家采取了相应措施来缓解这一状况,其中,日本在人行横道旁设置单独自行车道,将行人与自行车完全分离,这一定程度上降低了自行车与行人的相互干扰,但这种设计方法的安全性和有效性并未得到有效验证。目前,尽管存在成熟的仿真工具服务于传统道路设计,但研究共享空间的仿真模型却并不多见。对行人和自行车运动机制建模对道路行人设施的安全性评价和人行横道的通行能力评估都有至关重要的作用[1]。因此本文利用社会力模型对自行车与行人的运行机制进行建模,分析了自行车与行人分离设施的安全性和有效性。
行人能根据交通环境评估当前行为,并调整下一时刻的行为,移动过程中避免与其他行人和障碍物发生接触。基于此,Helbing等[2]在1995年构建了用于模拟行人在空间运动的社会力模型,该模型将行人与外界的相互作用量化为斥力和引力,最初社会力模型只建立了行人与行人以及行人与障碍物间的作用力;2000年Helbing等[3]考虑行人的随机波动特性对模型的参数进行了修正;2002年Helbing等[4]在基本社会力模型的基础上,引入了行人的空间需求特性,考虑在拥挤条件下行人对其他行人的排斥力以及相互躲避的切向滑动力;2005年Helbing等[5]认为行人期望速度的变化仅由自驱力决定,而实际中,周围行人的速度也影响着行人的期望速度,如果周围行人速度很快,行人期望速度也会改变。在Helbing等[2-5]的研究基础上,Apel[6]、Johansson[7]完善了行人自驱力方向权重方程,引入一个大于0且小于1的各向异性系数来反映行人对周围行人的影响强弱;Moussaid等[8]通过对行人实际运动数据的分析发现,两个行人运动方向的夹角和他们之间的距离严重影响着行人速度的变化,通过数据拟合,建立了行人运动转角大小与行人运动方向夹角及行人间距的经验模型。社会力模型在仿真大型场所行人疏散方面应用广泛,并且形成了较为完整的仿真体系,相关系数也已经过许多研究人员的完善,然而,利用社会力模型模拟路段或者信号交叉口处的行人过街行为并不多见,涉及自行车的行人过街仿真更加少见。Zeng等[9]构建了人行通道上的改进社会力模型,分析得出行人的转角和速度大小改变都服从正态分布,模型考虑了机动车以及信号灯对行人过街的影响,并建立了相关的社会力模型方程。自行车微观仿真建模有助于理解自行车与行人相互干扰机制和评价自行车道设施安全性。
本文尝试对信号交叉口自行车与行人的混合交通进行建模仿真。作为连续空间模型,社会力模型允许行人连续运动。因此本文在社会力模型的基础上,引入自行车道对自行车和行人的作用力以及自行车的跟随力,建立了自行车和行人混合交通流仿真的社会力模型。
1 基本社会力模型
基本社会力模型包括3个基本力:自驱力、个体之间相互作用力和个体与障碍物间的作用力,在这些力的合力作用下,个体(自行车和行人)产生加速度,并时刻调整自己速度大小和方向,以此向目的地移动。文中U=α或U=β为行人;U=i或U=j为自行车。
(1)

1.1 自驱力
个体在自身主观意识作用下,朝着期望位置移动,因此自驱力可以看作是个体对自己施加的力。个体从期望速度完成减速需要一个基本的反应时间τU。在过街过程中,个体根据周围环境调整速度方向和大小,以保证最短路径过街。个体期望速度的方向为:
(2)
自驱力给个体一个作用力,在反应时间内,将个体从当前速度方向调整到期望速度方向,如图1所示,自驱力如式(3)所示。
(3)
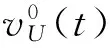
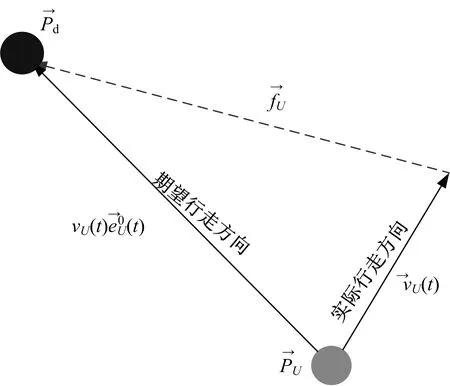
图1 期望速度和自驱力Fig.1 Expected speed and drive force
1.2 个体之间的作用力
个体为自身的舒适和安全会保持一个隐私空间,其他个体不能侵犯这个空间;但是,个体会受到其他个体影响,当接近周围个体时,其他个体就会对它产生作用力。随着群体密度的增大,个体对空间的需求就会降低,甚至出现相互接触的行为,由此个体之间会产生一个接触力。由此可知,个体之间作用力包含心理排斥力和物理力两部分,如式(4)所示。个体质心之间距离如图2所示。
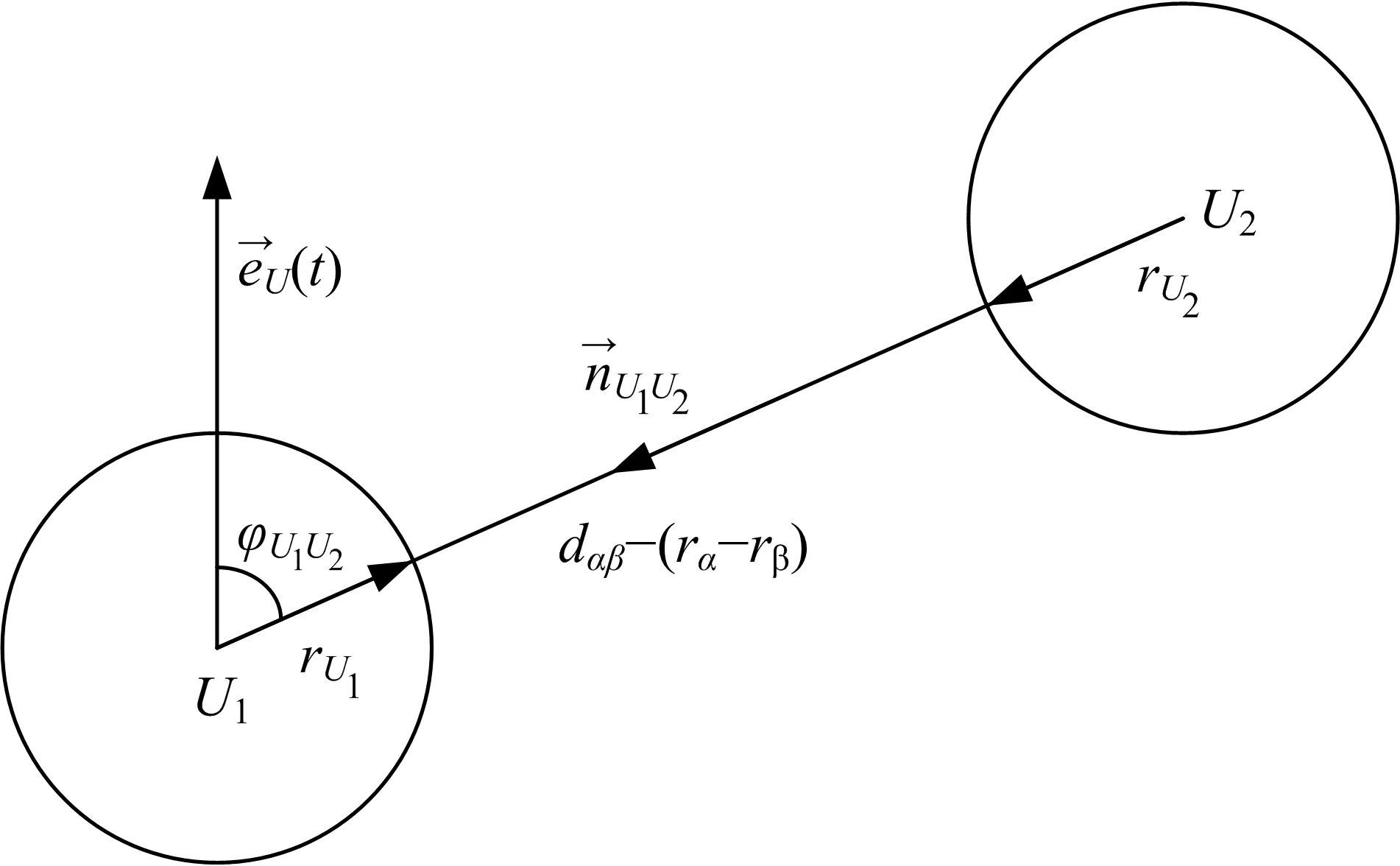
图2 个体间距离Fig.2 Distance between individuals
(4)
(5)

(6)

(7)
式中:λα体现行人运动的各向异性,且0≤λα≤1;φU1U2为个体U1和U2运动方向的夹角;

(8)
(9)
1.3 障碍物的作用力
个体通常会与障碍物保持一定的距离,参照个体之间作用力的表达式,个体与障碍的作用力可用下式表达:
(10)

2 社会力模型修正
2.1 行人到达位置与期望位置分布
行人根据期望位置,实时调整当前速度方向,选择距离期望位置最近的轨迹过街。以往研究中,期望位置是随机的,本文行人期望位置分布采用Zeng等[9]建立的行人期望位置的分布模型,即利用韦布尔分布构建了如下行人期望位置的分布模型:
(11)
式中:f(x,a,b)为韦布尔分布的概率密度;a为形状参数;b为尺度参数。
建立a、b与人行横道宽度、行人密度、行人起始和目的地位置的函数关系,如式(12)和(13)所示:
a=λ1,0+λ1,1y1,1+λ1,2y1,2+λ1,3y1,3
(12)
b=λ2,0+λ2,1y1,1+λ2,2y1,2+λ2,3y1,3
(13)
式中:y1,1、y1,2、y1,3为人行横道宽度、行人密度、行人起始和目的地位置;λ1,0、λ1,1、λ1,2、λ1,3和λ2,0、λ2,1、λ2,2、λ2,3为模型系数。
2.2 自行车与行人的相互作用力
本文类比行人与行人的相互作用,自行车被看作具有一定半径的圆形实体,自行车与行人的相互作用力也由心理力和物理力组成。当行人遇到自行车时,自行车就会对行人产生排斥力以保证自行车的安全行驶空间;当行人和自行车密度很大时,行人可能会与自行车接触,即自行车与行人发生碰撞,此时自行车会对行人产生一个接触力,如式(14)表示:
(14)
2.3 自行车之间的跟随力与排斥力
实际自行车过街时,如果前方存在其他自行车,后方自行车为减小过街阻力,就会跟随着前方自行车移动,而当后方自行车特别靠近前方自行车时,为了自身的安全,后方自行车又会减速行驶,这就是常见的跟随现象。为反映这种常见现象,本文建立了前方自行车对后方自行车的作用力模型。如图3所示,前方自行车对后方自行车的作用力可以这样描述:当两辆自行车之间的距离ε2≤d≤ε1时,后方自行车会加速,以达到跟随前车过街的目的;当两辆自行车之间距离过大或者过小时,这种跟随行为消失。因跟随力只在ε2≤d≤ε1时起作用,当后方自行车超车时,会选择从远离前方自行车的位置完成超车,超车时自行车之间的相互作用力不包含跟随力。自行车之间的这种跟随力可以用式(15)表示。
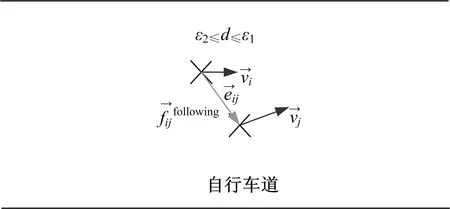
图3 自行车跟随力Fig.3 Bike following force
(15)
(16)
式中:Fij表示前方自行车只对后方自行车产生跟随力,对前方自行车没有影响。Fij的大小随着λα的变化而变化,如图4所示。
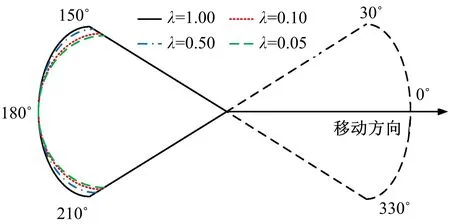
图4 各向异性系数示意图Fig.4 Anisotropic factor diagram
p是调整系数,可以用来确定跟随力的大小和影响范围,p可以用式(17)计算得到:
(17)
2.4 自行车道对行人和自行车的作用力
自行车道将行人和自行车分离。通常情况下,行人遵守交通规则在人行横道内行走,行人会与自行车道和人行横道边界保持安全距离。这意味着,当行人位于人行道内部时,自行车道和人行横道边界对行人有排斥作用,使行人持续在人行横道内行走。而当行人因为拥挤或者偶然因素进入自行车道后,行人在后续的运动过程中会逐步返回人行道内行走,这说明自行车道产生一个引力,将行人拉回人行横道。行人和自行车的受力如图5所示。
学生在实验时配置6种质量分数的杀虫剂溶液:1.25%、2.5%、5%、10%、20%、40%。学生在实验时配置4种质量分数的洗涤剂溶液:2.5%、5%、10%、20%。
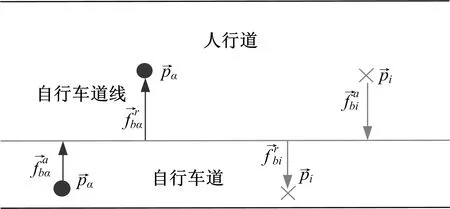
图5 自行车道对行人和自行车的作用力示意图Fig.5 Reaction among cyclist path, pedestrian and cyclists
同样的,自行车道在自行车道内时,自行车道对自行车产生一个斥力,使自行车持续在自行车道内行走;反之,自行车受到边界对它的引力,进而回到自行车道。类似于边界对行人的作用力,用分段函数表示自行车道对行人和自行车的作用力,如式(18)和(19)所示:
(18)
(19)
2.5 行人冲突避让机制
当行人(自行车)与其他行人(自行车)将要发生冲突时,行人(自行车)会采取减速或者停止来避免冲突。准确的冲突避让模型能够有效降低仿真中出现的行(自行车)重叠现象。常见的冲突可以分为两类,如图6(a)所示。然而,并非所有的冲突都会转变成碰撞(即事故),因此应该建立准确的模型判别冲突是否有效。
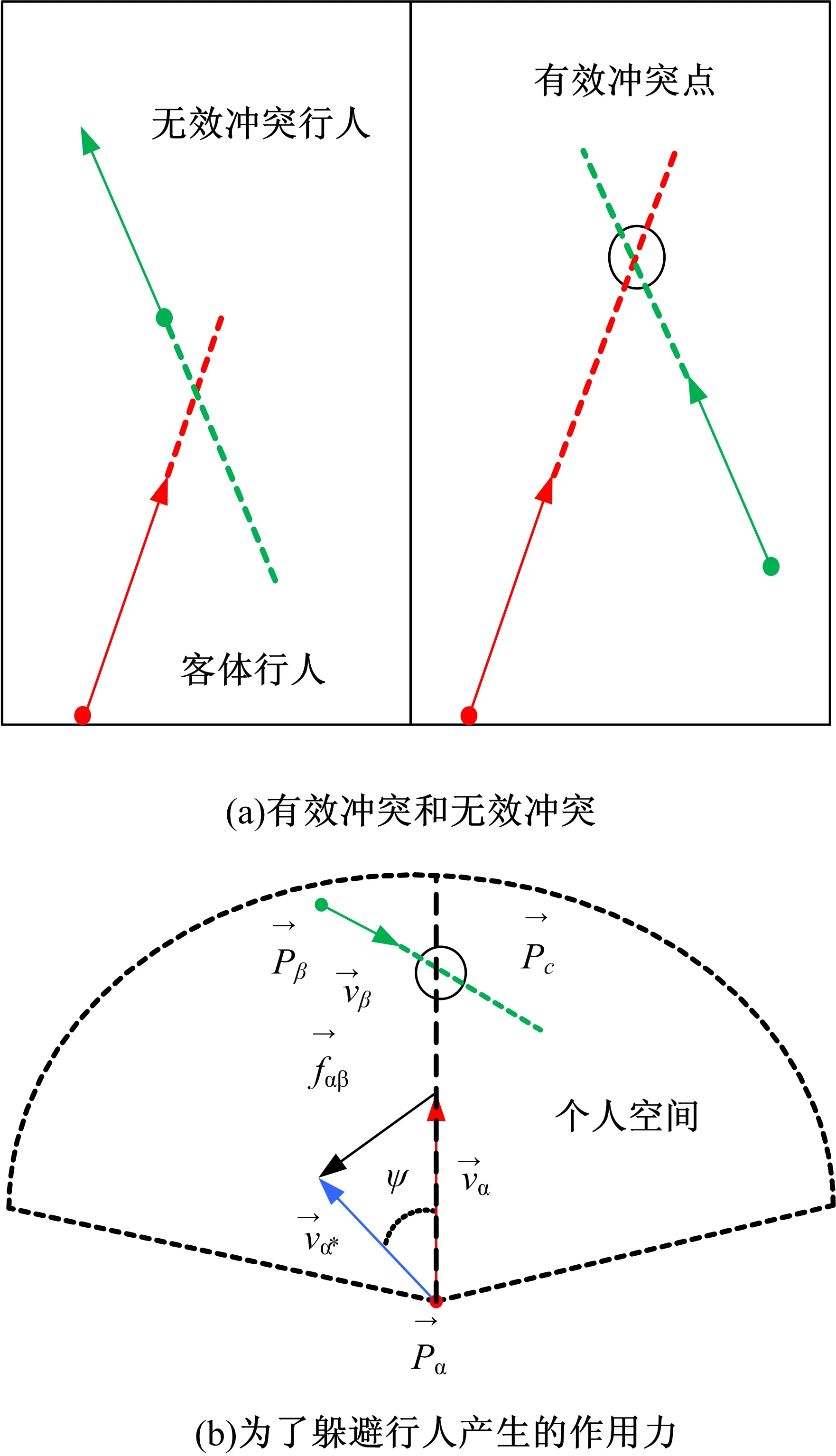
图6 行人(自行车)避免冲突产生的作用力Fig.6 Force of pedestrians (bikes) avoiding conflict
TC表示行人(自行车)以下个仿真步长的速度到达冲突点所需要的时间,TCα和TCβ分别表示行人(自行车i)α和行人(自行车j)β到达冲突点所需要的时间。利用式(20)(21)可以计算得到TCα和TCβ。
(20)
(21)


(22)
(23)
只有当TCα和TCβ均大于0,行人(自行车)α和行人(自行车)β之间的冲突才是有效的。其他条件下,行人(自行车)或者已经通过冲突点,或者不存在潜在的冲突。
如式(24)所示,TCαβ是TCα和TCβ差的绝对值。TCαβ可以用来表示行人(自行车)α和β之间的冲突风险。TCαβ越大表示冲突风险越小。
(24)
当冲突被判定有效时,行人(自行车)α将会采取避让措施来避免与行人(自行车)β的冲突。行人(自行车)α通过调整速度大小和方向来实现避免冲突的目的。冲突避让的流程图如图7所示。
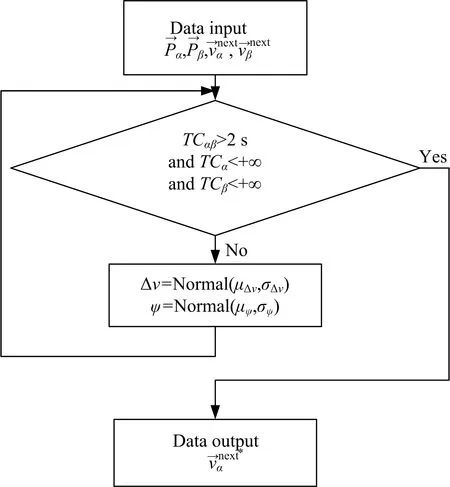
图7 冲突避让流程图Fig.7 Flow chart of individual collision avoidance
(25)
(26)
式中:ψ为逆时针偏移角度;Δv为速度的变化量。
(27)
3 仿真模拟与分析
本文对自行车和行人混合交通流进行了仿真。对比常规人行横道,混行交通流中存在更多的相互作用与冲突,设置自行车道后,行人和自行车的相互作用减少。然而,自行车道的设置能否降低这种相互作用?如果能降低,自行车道又该如何根据交通流组成灵活设置?自行车道宽度大小对行人和自行车的运行又有何影响?因此,本文基于上述行人和自行车的动力学模型,利用Matlab进行了计算机仿真,并对仿真结果进行了分析。在设有/未设自行车道的两种人行横道场景,对行人和自行车混合交通流进行仿真。仿真场景如图5所示,设置的人行横道长为50 m,总宽度为8 m,当存在自行车道时,自行车道宽度在[0,4] m区间变化,仿真时间步为0.6 s。
3.1 仿真参数标定
建立的社会力模型包含许多参数,参数的取值影响仿真的效果。所有参数可以分为两类:可测参数与不可测参数。一些参数如自行车和行人速度可以通过调查数据得到,而作用力强度和影响范围参数无法直接得到,因此本文采用Zeng等[9]的标定方法,并参考相关研究成果确定参数的合理值。标定过程如下:
(1)直接参考Zeng等[9]和Li等[10]的研究结果标定相关参数如视野范围、反应时间等。
(2)最大速度等参数通过调查数据直接标定。
(3)确定可测参数后,利用最大似然估计法(参考Zeng等的方法)标定没有物理意义且无法测量的参数,如作用力强度和范围。参数的标定需要获取自行车和行人的真实运动轨迹,本文利用江晟等[11,12]的轨迹提取方法从视频数据中获取了自行车和行人的真实运动轨迹。
柳莺路和聚业大街交叉口在2015年经过改造成为长春市“绿道”,以满足骑行者锻炼需求,该交叉口在人行横道处设置了自行车道线。以此交叉口作为调查地点,获取行人和自行车运行轨迹,标定模型相关参数。参数的标定结果如表1所示,在置信水平为95%时,p值表明参数估计值是有效的。

表1 参数标定结果Table 1 Calibration results of parameters
3.2 模型验证
为排除偶然因素的影响,并得到准确数据,在同一仿真条件下,进行了100次仿真实验,记录所有行人和自行车的过街平均速度。然后分别对行人和自行车的时间和仿真速度进行对比,如图8所示。根据实际速度和仿真速度(平均速度和方差)的对比发现,修正的模型是有效的。
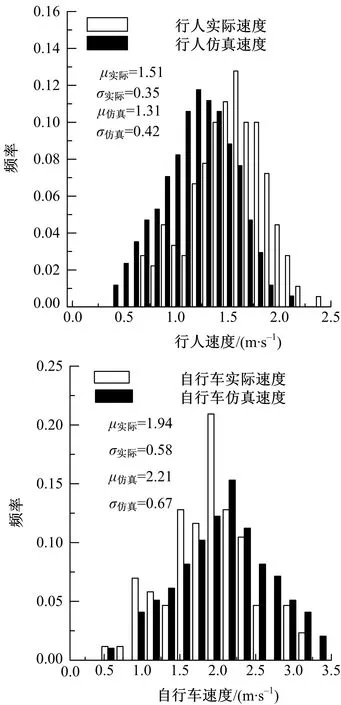
图8 实际速度与仿真速度对比Fig.8 Speed histograms of bikes and pedestriansobserved data and simulation results
3.3 自行车道设置分析
图9描述了自行车道的设置与否对自行车和行人的安全性以及自行车释放规律的影响。为减小自行车与行人比例对仿真的影响,将自行车与行人的比例固定为4∶1,自行车道宽度设为3 m;图9(b)中行人数为40,自行车为10。
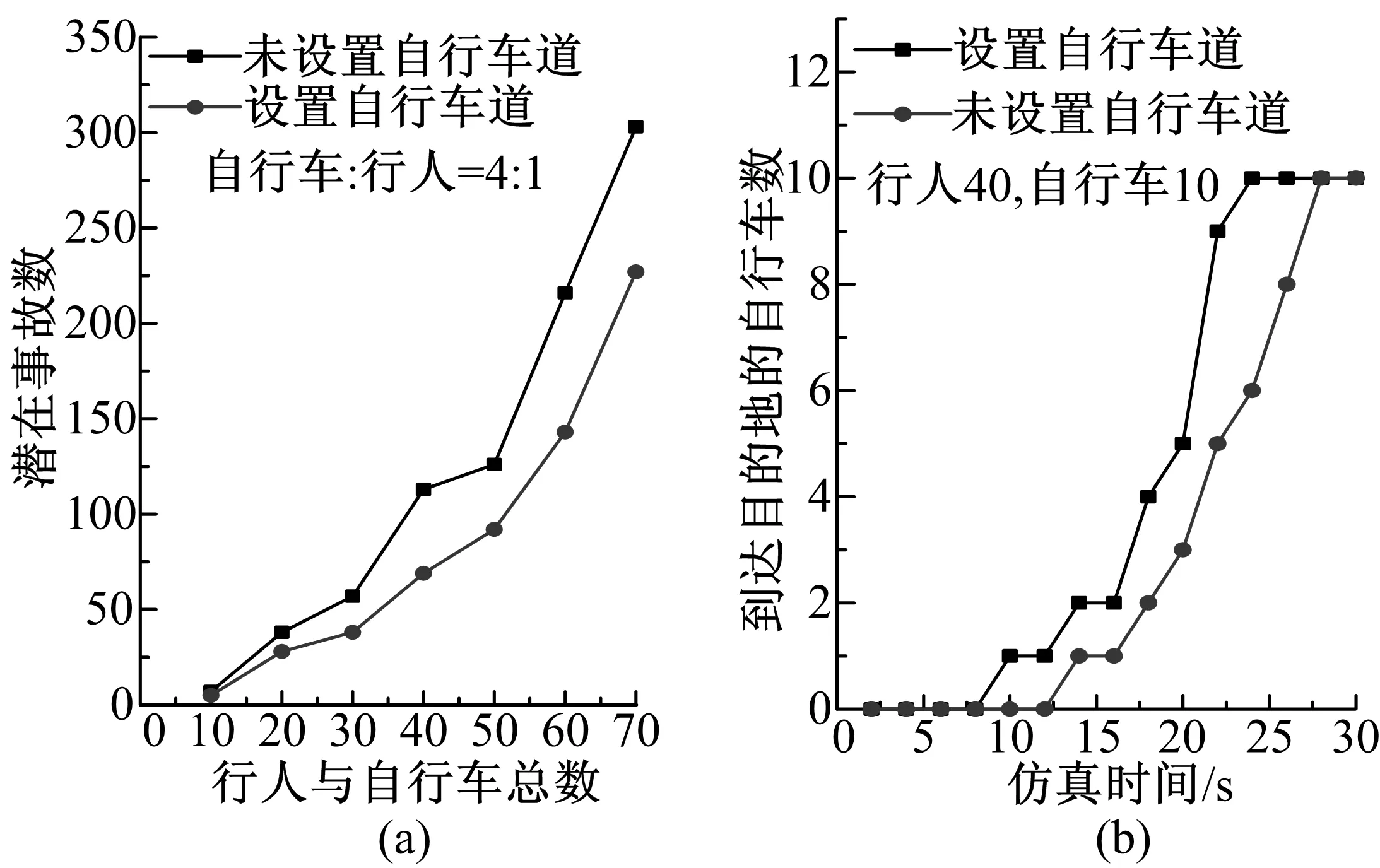
图9 自行车道设置与否对行人和自行车的影响Fig.9 Impact of cyclist path on pedestrian and bike
由图9(a)可知,无论是否设置自行车道,随着行人和自行车总数的增加,行人与自行车之间的潜在事故数都会增加;而设置自行车道后,行人和自行车被有效分离,它们之间的冲突和相互作用降低,混合交通流的潜在事故数随之减少,这说明设置自行车道对于提高行人过街安全性是有效的。图9(b)表明,经过相同的仿真时间,设置自行车道的仿真环境中到达目的地的自行车数大于未设置自行车道中环境中到达目的地的自行车数;并且相同条件下,设置自行车道后,所有自行车到达目的地的时间为23 s,比未设置自行车道时所有自行车的过街时间少(28 s)。这是因为,未设置自行车道的环境下,行人占据混合交通流的主导地位,自行车受行人干扰较大,自行车的过街速度被迫降低到与行人接近的速度,导致自行车过街时间增加。
3.4 自行车道宽度设置分析
为研究自行车道宽度对自行车释放的影响,本次仿真中,自行车与行人总数为50。不同自行车道宽度条件下的自行车道过街时间如图10所示。
由图10可知:自行车道宽度保持不变的条件下,自行车的过街时间随着自行车数目的增加而增加;在自行车数目保持不变的条件下,自行车的过街时间随着自行车道宽度的增加而减少,这是因为当自行车数量固定时,自行车道宽度越大,自行车的行走自由性也愈大,受行人的干扰也越小,自行车能够保持较大的速度过街,到达目的地所需时间就少,这与实际交通流运行相符。此外,当自行车道宽度达到3.2 m时,在自行车数量小于6时,过街时间保持不变;自行车道为4 m时,自行车数量小于8时,自行车过街时间也保持不变,因为这种仿真条件下,自行车有足够的行驶空间,且受到其他个体的干扰较小,能以期望速度过街。
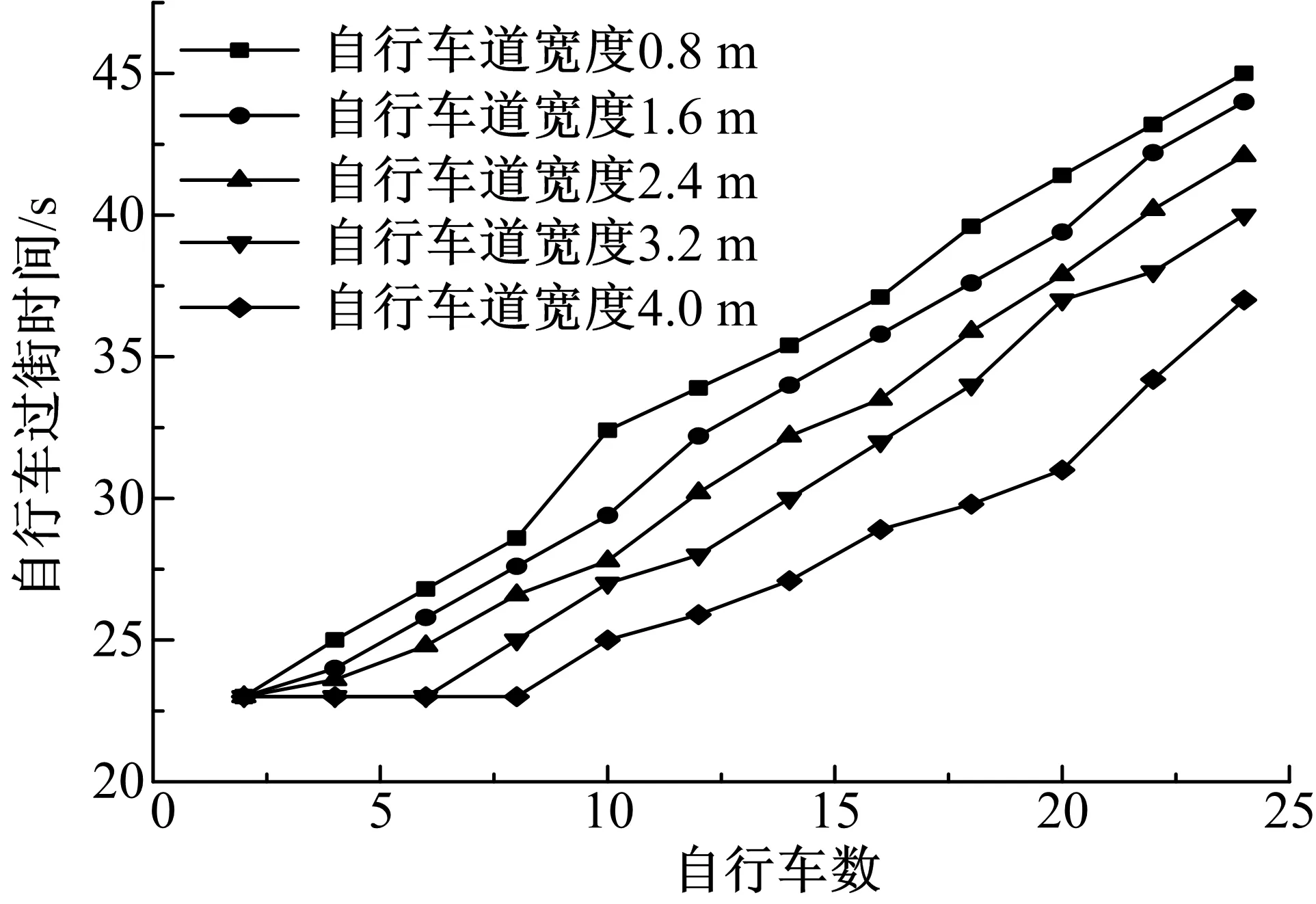
图10 自行车道宽度对自行车过街时间的影响Fig.10 Influence of cyclist's path widthon crossing time
4 结束语
在基本社会力模型的基础上,充分考虑自行车道的设置对行人以及自行车的影响,引入自行车道对自行车和行人的作用力以及自行车之间的跟随力,提出了用于仿真自行车和行人过街混合交通流的改进社会力模型。数值模拟分析发现,设置自行车道能够有效分离行人和自行车,并提高自行车和行人混合交通的运行效率;此外,在自行车流中模拟得到了部分自行车的跟随和自组织现象,与实际交通观测相符;随后,分析了自行车道宽度对自行车过街时间的影响,发现随自行车道宽度增加,自行车过街时间随之减少。是否设置自行车道以及如何设置自行车道既能有效利用人行横道资源又能保证行人和自行车的安全,是重点需要考虑的问题,改进的社会力模型虽然能够重现自行车与行人混合交通流的运行情况,但是本文却并没有得到详细的自行车道设置方法(设置临界流量和设置宽度),也没有考虑超车时自行车之间的相互作用,这将是作者下一步的研究方向。
[1] Papadimitriou E, Yannis G, Golias J. A critical assessment of pedestrianbehavior models [J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2009, 12(3): 242-255.
[2] Helbing D, Molnar P. Social force model for pedestrian dynamics [J]. Physical Review E, 1995, 51(5): 4282.
[3] Helbing D, Farkas I, Vicsek T. Simulating dynamical features of escape panic [J]. Nature, 2000, 407(6803): 487-490.
[4] Helbing D, Farkas I J, Molnar P, et al. Simulation of pedestrian crowds in normal and evacuation situations [J]. Pedestrian and Evacuation Dynamics, 2002, 21(2): 21-58.
[5] Helbing D, Buzna L, Johansson A, et al. Self-organized pedestrian crowd dynamics: Experiments, simulations, and design solutions [J]. Transportation Science, 2005, 39(1): 1-24.
[6] Apel M. Simulation of pedestrian flows based on the social force model using theverlet link cell algorithm [D]. The Republic of Poland:Institute of Computing Science,Poznan University of Technology,2004.
[7] Johansson A. Pedestrian simulations with the social force model [D].Dresden, Germany: Institute for Transport & Economics, Dresden University of Technology, 2004.
[8] Moussaïd M, Helbing D, Garnier S, et al. Experimental study of the behavioural mechanisms underlying self-organization in human crowds [J]. Proceedings of the Royal Society of London B: Biological Sciences, 2009: 276(1668): 2755-2762.
[9] Zeng W, Chen P, Nakamura H, et al. Application of social force model to pedestrian behavior analysis at signalized crosswalk [J]. Transportation Research Part C: Emerging Technologies, 2014, 40: 143-159.
[10] Li M, Shi F, Chen D. Analyze bicycle-car mixed flow by social force model for collision risk evaluation[C]∥The 3rd International Conference on Road Safety and Simulation, Washington, DC,USA,2011:1-22.
[11] 江晟, 王殿海, 陈永恒, 等. 基于视频的行人运动轨迹再现与过街行为表达[J]. 东南大学学报: 自然科学版, 2012, 42(6): 1233-1237.
Jiang Sheng, Wang Dian-hai,Chen Yong-heng, et al. Pedestrian movement trajectory reappearance and crossing feature expression based on video processing [J]. Journal of Southeast University (Natural Science Edition), 2012, 42(6): 1233-1237.
[12] 江晟. 混合交通视频检测关键技术研究 [D]. 长春:吉林大学交通学院, 2013.
Jiang Sheng. Research on key technologies of mixed traffic video detection [D]. Changchun:College of Transportation, Jilin University, 2013.
