轮毂液压混合动力商用车主动防侧翻控制
2018-03-10曾小华李广含宋大凤朱志成
曾小华,李广含,宋大凤,李 胜,朱志成
(1. 吉林大学 汽车仿真与控制国家重点实验室,长春 130022;2.一汽解放青岛汽车有限公司,山东 青岛 266043)
0 引言
由于重型车辆尺寸和质量较大、质心较高,使得其侧翻稳定性较差,尤其是在较高车速、较大转向和紧急避障的工况下,侧翻事故发生的几率大大增加,是道路交通安全的重要隐患。根据美国国家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)的统计数据显示,在美国重型车辆的侧翻事故每年高达5200起,由此造成的死亡人数每年高达5300人[1]。因此,重型商用车主动防侧翻控制越来越引起人们的关注。
目前针对主动防侧翻控制系统的研究主要集中于主动转向技术[2,3]、差动制动技术[4-6]、主动悬架技术[7,8]以及联合控制技术[9,10]四个方面。其中,主动转向技术不适合高速紧急避障工况,主动悬架系统响应速度较慢,联合制动系统控制方法复杂,且被控车辆需配置主动转向装置,而差动制动技术实施简单、成本小,目前应用较为广泛。
本文针对某重型卡车轮毂液压混合动力系统方案[11,12],结合该系统可通过安装于车辆前轮的二次元件轮毂液压泵/马达实现再生制动的功能特点,研究基于差动制动的主动防侧翻控制算法。目前此类商用车轮毂液驱混合动力系统凭借其集成度高、工况适应性好、经济性良好以及对环境污染小等综合优点,已成为国外商用车,尤其中重型卡车装备的先进技术之一[13]。针对所提出的主动防侧翻控制方案,本文首先应用线性二次型最优控制方法(Linear quadratic regulator, LQR)设计主动防侧翻控制器,并基于前馈+反馈控制方法设计轮毂液压泵/马达再生制动转矩控制器,最后在MATLAB/Simulink、AMESim以及TruckSim联合仿真环境下,进行典型转向工况仿真分析,验证本文主动防侧翻控制算法的控制效果。
1 系统构型与主动防侧翻方案
轮毂液压混合动力重型商用车构型,如图1所示。该系统通过在车辆非驱动轮上增加一套轮毂液压驱动系统,使车辆在越野等复杂工况行驶时,将非驱动轮转变为驱动轮,从而充分利用车轮与地面之间的附着力,改善车辆动力性和通过性;同时,可以通过前轮轮毂液压泵/马达液压再生制动力矩的主动控制实现差动制动,既能够回收部分制动能量,减少制动器磨损,又能够实现重型车辆的主动防侧翻控制,提高侧倾稳定性。
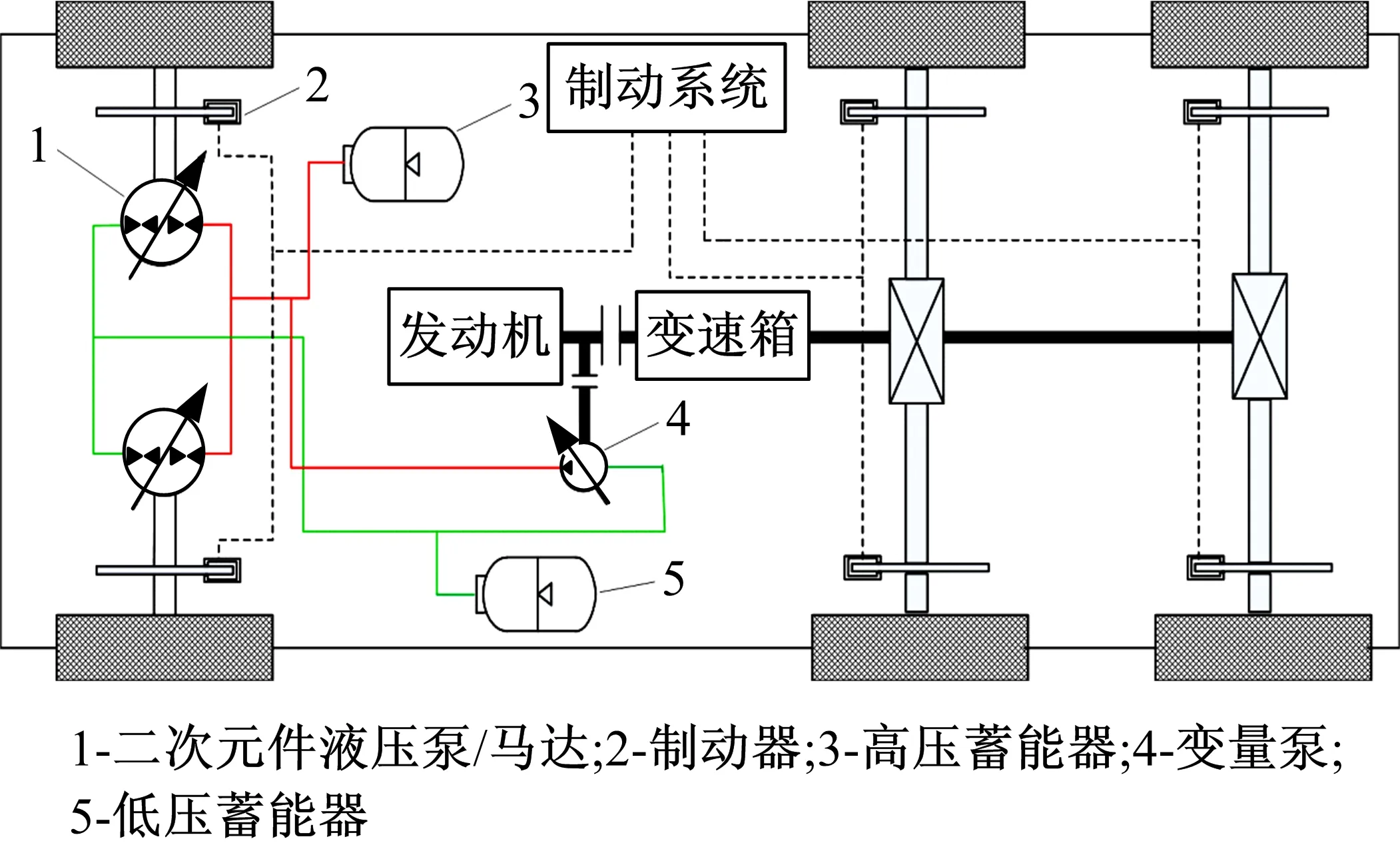
图1 轮毂液压混合动力商用车构型Fig.1 Configuration of hydraulic hub-motorhybrid system
针对该商用车辆建立主动防侧翻控制系统,如图2所示,通过侧翻预警系统对被控车辆行驶状态信息的实时监控,利用三自由度侧翻参考模型[10]实时计算侧翻预警时间TTR(Time-to-rollover),从而预测车辆侧翻危险时刻。如果预警系统判断车辆将出现侧翻危险,则触发差动制动防侧翻控制系统,利用差动制动防侧翻控制器求解得到目标主动横摆力矩ΔM,通过横摆力矩分配策略计算前轮制动压力需求,并控制前轮轮毂液压泵/马达进行差动制动。
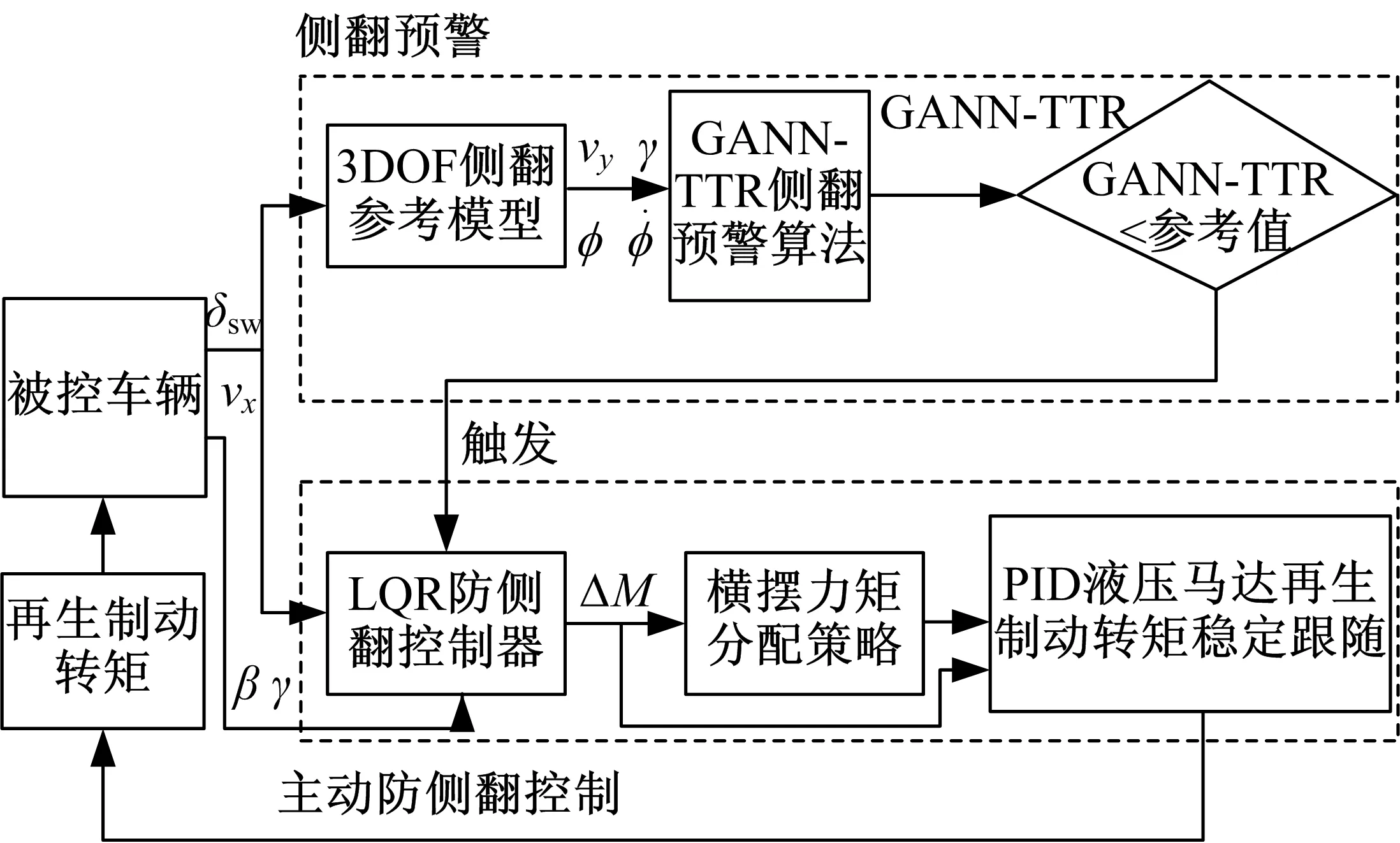
图2 主动制动防侧翻控制方案Fig.2 Control scheme of active anti-rollover control
2 主动防侧翻控制器设计
2.1 基于LQR的主动防侧翻控制器设计
依据车辆线性二自由度模型确定理想运动状态,并根据线性二次型最优控制理论决策出最优横摆力矩,设计基于LQR的主动防侧翻控制器。
建立该车线性二自由度模型,如图3所示,只考虑车辆侧向和横摆两个自由度,同时为分析方便将该三轴车辆简化为两轴,并且忽略路面变化和轮胎回正力矩对车辆的作用。
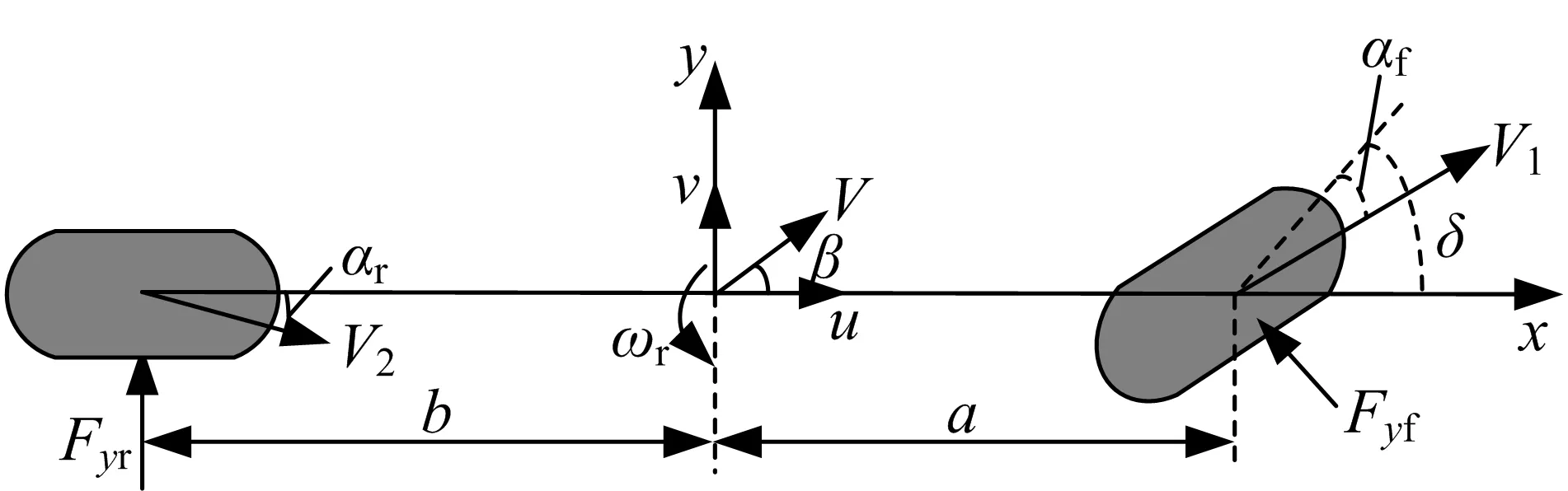
图3 线性二自由度模型Fig.3 Linear model with two degrees of freedom
依据车辆动力学分析,建立二自由度车辆模型的动力学方程,如下所示:
(1)
式中:m表示整车质量;β表示质心侧偏角;ωr表示横摆角速度;δ表示前轮转向角;k1与k2分别表示前、后轴侧偏刚度;a和b分别表示质心距前、后轴距离;vx表示纵向速度;Iz表示横摆转动惯量;Mz表示主动横摆力矩。
根据式(1)建立用于防侧翻控制器设计的状态空间方程,如下所示:
(2)
式中:
主动防侧翻控制的主要需求是确保系统横摆角速度以及质心侧偏角均处于可控范围内,为此引入偏差量Z(t)=η-y,使系统输出与控制目标之间的误差尽可能小,η表示控制目标。同时为了避免控制过程中执行器达到饱和,确保系统平稳变化,引入变化率控制量V(t)=dU/dt,以确保车辆转向角与主动横摆力矩变化率在允许范围内。综上,对于该多输入系统跟踪控制的LQR问题,建立二次型性能泛函,如下所示:
(3)
式中:Q为2×2维半正定阵,Q越大,系统响应越快;R为1×1维正定阵,分别表示性能输入Z与控制输入V的相对权重,R越大,系统变化越平稳。
应用极小值原理,求解得到系统最优控制作用,如式(4)所示,其本质可以看作状态变量的比例和状态偏差的积分环节之和。

(4)
式中:K1和K2表示最优反馈增益,可利用MATLAB求解Riccati方程得出[14];U*即为LQR控制器所设计出的差动制动最优横摆力矩。
2.2 主动横摆力矩分配
根据LQR防侧翻控制器计算得到的最优主动横摆力矩,通过差动制动方式控制相应车轮制动抵消带来不稳定状态的横摆力矩,从而提高车辆的侧倾稳定性,防止车辆侧翻。根据汽车理论[15],每个车轮制动力形成的补偿横摆力矩对车辆状态不同,车辆各个车轮单独制动时对车辆横摆运动产生的效果如图4所示。
基于此建立差动制动判断逻辑,如表1所示。其中,Δω表示理想横摆角速度ωr与实际横摆角速度ω偏差;前轮转角δ大于0表示左转向,小于0为右转向。
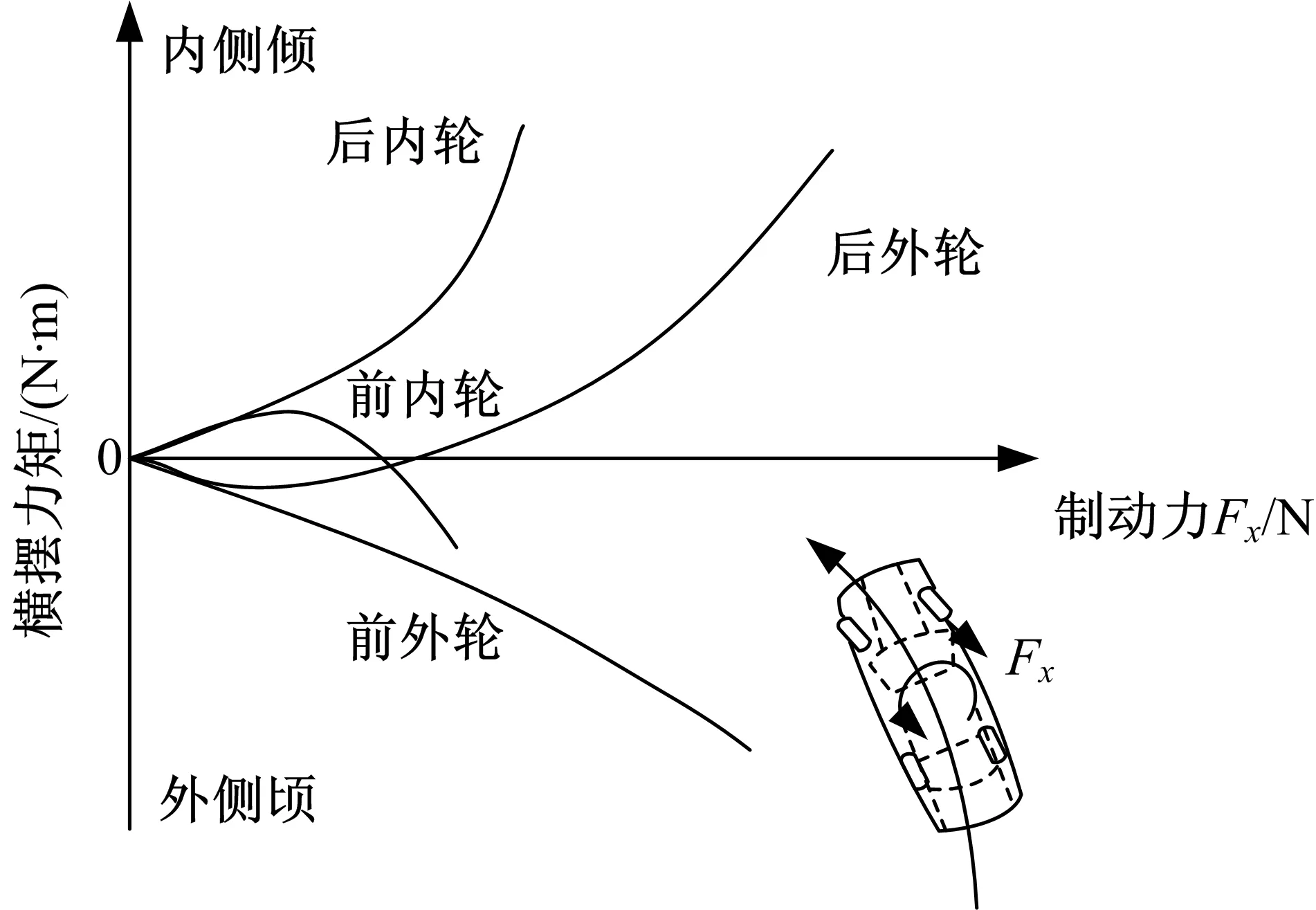
图4 不同车轮制动对车辆横摆力矩影响Fig.4 Different wheel brakingeffect on yawing torque
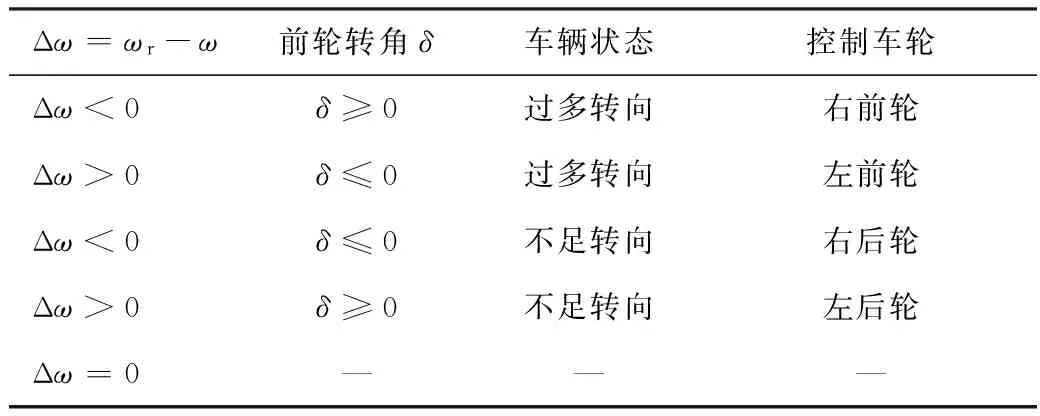
表1 差动制动判断逻辑Table 1 Judgment logic of differential braking
根据LQR主动防侧翻控制器决策得到的主动横摆力矩,可计算前、后轮分别制动时的制动压力需求,如下所示:
(5)
式中:pfi表示前轮制动需求压力;pri表示后轮制动需求压力;Bi表示各车轮制动效能因数;Lf与Lr分别表示前、后轮轮距。
2.3 液压泵/马达主动制动转矩控制器
根据差动制动主动防侧翻判断逻辑,当需求右前轮或左前轮制动时,制动力矩由二次元件液压泵/马达提供,此时二次元件液压泵/马达工作于“液压泵状态”。根据式(5)所示的前轮制动压力需求,计算二次元件液压泵/马达的制动转矩需求,进而计算液压泵/马达斜盘开度,如下所示:
Dp=2πpfiBi/Pacc/Vpmax
(6)
式中:Dp表示斜盘开度;Pacc表示蓄能器进口压力;Vpmax表示二次元件液压泵/马达最大排量。
由于液压系统本身强非线性、参数时变的特点以及液压蓄能器、液压泵/马达等液压元件不同的响应特性[16,17],仅通过目标排量计算值进行开环控制难以保证动态控制品质。基于此,本文通过前馈+反馈的控制思想设计二次元件液压泵马达转矩控制器,如图5所示,前馈控制通过公式计算得到控制排量目标值,反馈控制则通过PI控制器动态调节液压系统波动产生的控制误差。
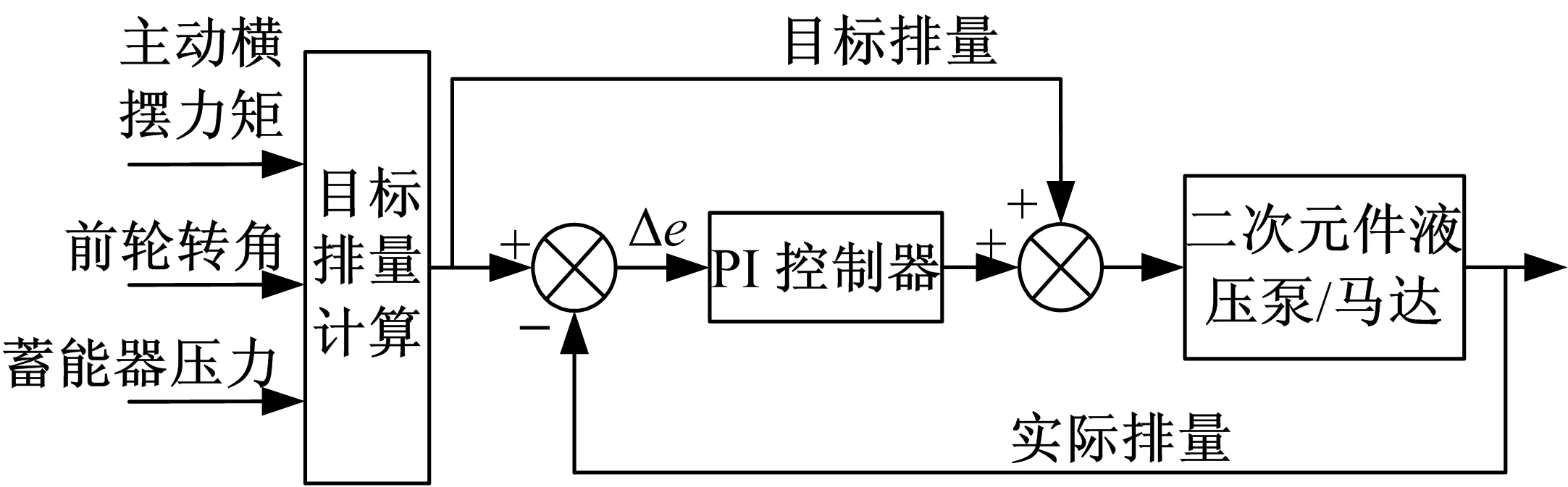
图5 二次元件液压泵马达转矩控制器Fig.5 Torque controller of hydraulic in-wheel pump/motor
3 系统建模
3.1 模型搭建
利用TruckSim软件创建车辆整车模型,包括3部分:整车外形、转向/制动/动力传动系统以及车辆行驶系统,如图6所示。在AMESim中建立液压传动系统模型,如图7所示。在MATLAB/ Simulink环境下建立主动防侧翻控制策略,如图8所示。利用三软件联合仿真平台,验证本文主动防侧翻控制算法的有效性。
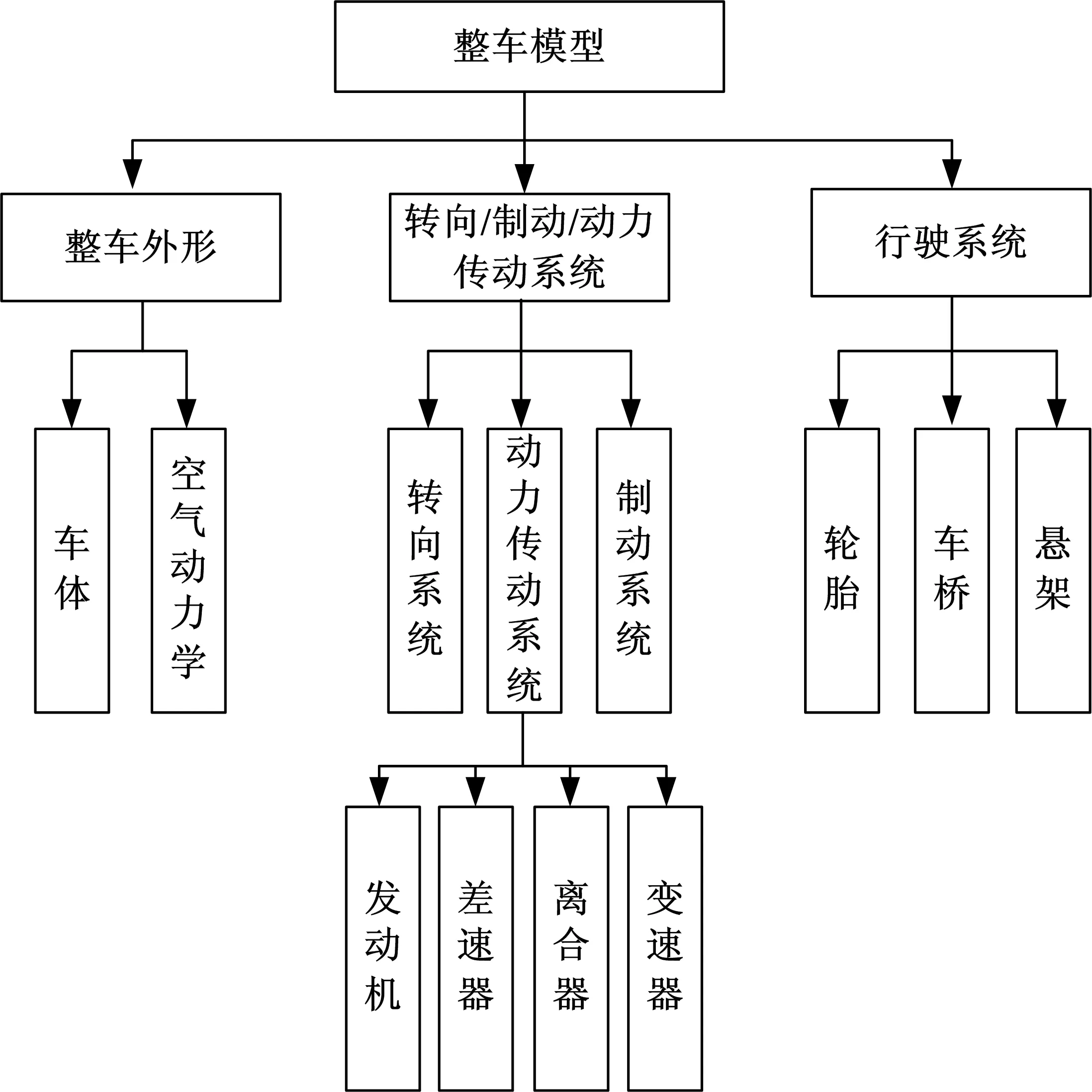
图6 TruckSim整车模型架构Fig.6 Vehicle model scheme at TruckSim
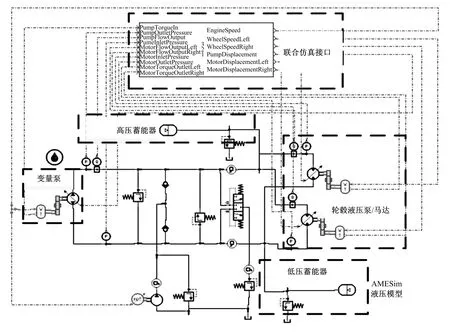
图7 液压传动系统模型Fig.7 Model of hydraulic transmission system
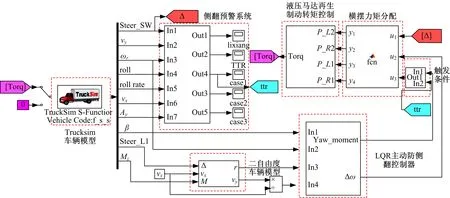
图8 主动防侧翻控制策略模型Fig.8 Active anti-rollover control strategy
3.2 整车参数
本文研究的轮毂液压混合动力重型卡车,整车基本参数如下:质量为14820 kg;轴距为4500 mm;重心高度为2148 mm;车轮半径为544 mm;迎风面积为6.7 m2;风阻系数为0.8;滚阻系数为0.008;采用Poclain MS多功能轮毂马达,最大排量为1043 cm3/r;蓄能器容积为50 L;初始压力为20 MPa;最高工作压力为31.5 MPa。
4 仿真分析
本文通过在两种典型转向工况:阶跃转向工况和鱼钩转向工况,仿真验证所提出的轮毂液压混合动力重型车辆主动防侧翻控制算法的有效性。
4.1 仿真工况
阶跃转向工况下的方向盘转角随时间的变化曲线,如图9(a)所示。该工况下仿真设置初始车速为80 km/h,路面附着系数为0.85,仿真步长为0.01 s。
鱼钩转向工况是一种比较恶劣的行驶工况,车辆在鱼钩转向工况下高速行驶极易发生侧翻,所以此工况能够更好地反应车辆在极限工况下的行驶稳定性。鱼钩转向工况的方向盘转角最大为294°,如图9(b)所示,该工况设置初始车速为70 km/h、路面附着系数为0.85,仿真步长为0.01 s。
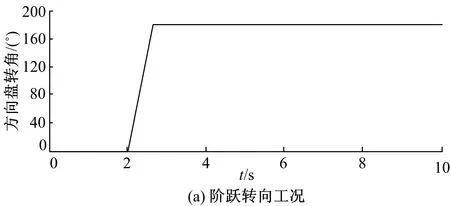
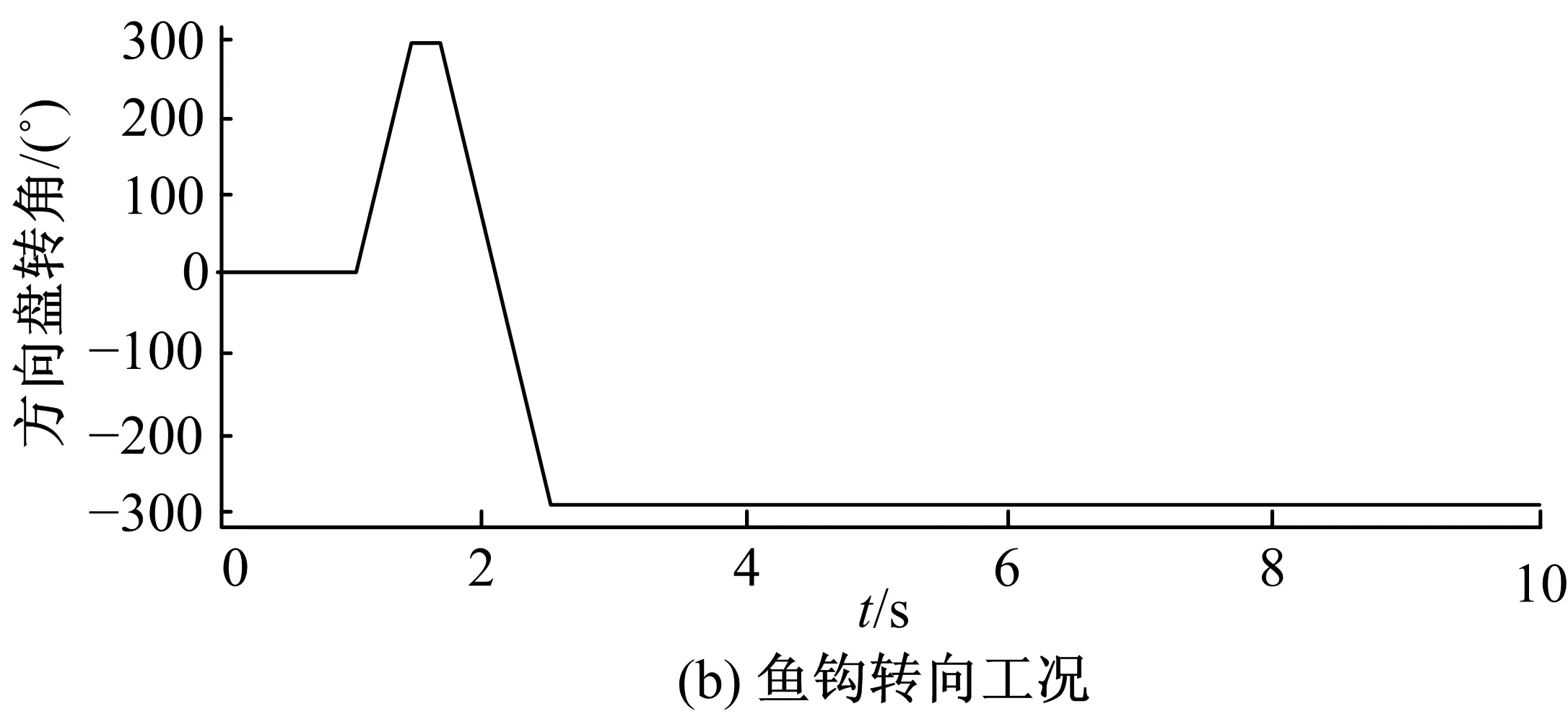
图9 仿真工况Fig.9 Simulation conditions
4.2 阶跃转向工况仿真
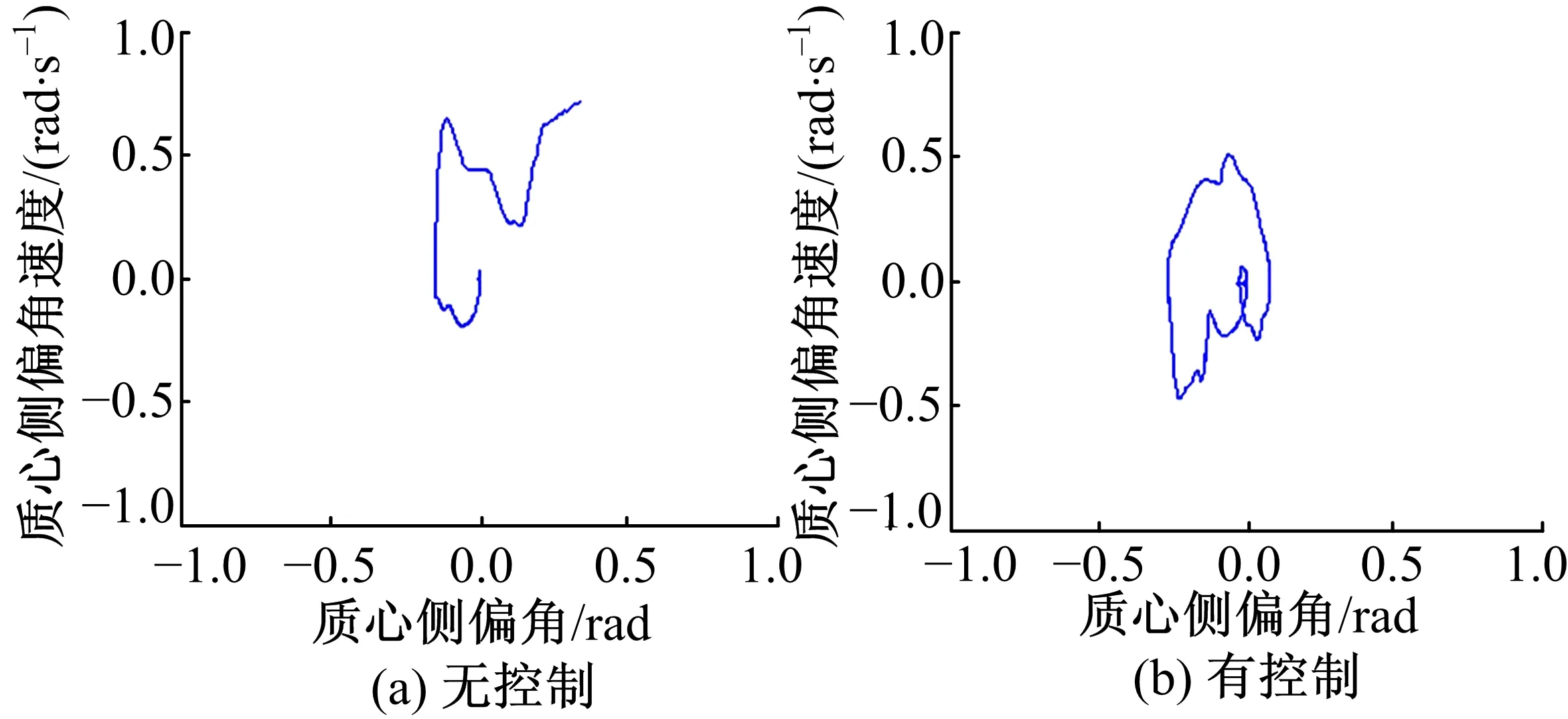
车辆在阶跃转向工况下的侧倾角、侧倾角速度、侧向加速度、质心侧偏角和横摆角速度在控制前、后的曲线对比,如图10~图12所示。由图10~图12可见,在车辆不施加主动防侧翻控制时,车辆行驶3.6 s左右失去稳定性,在4.5 s时完全侧翻,仿真测试停止。加入主动防侧翻控制后,侧翻预警系统可有效触发主动防侧翻控制系统,被控车辆的侧倾角、侧倾角速度、侧向加速度、质心侧偏角和横摆角速度数值均有明显的减小,并处于稳态的数值范围内。
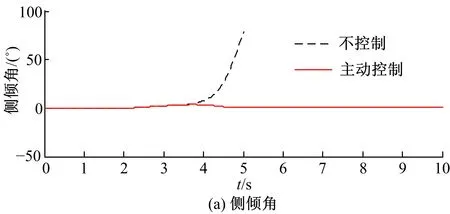
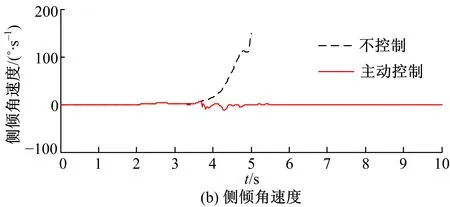
图10 侧倾角与侧倾角速度(阶跃转向工况)Fig.10 Roll angle and roll rate(step steering condition)
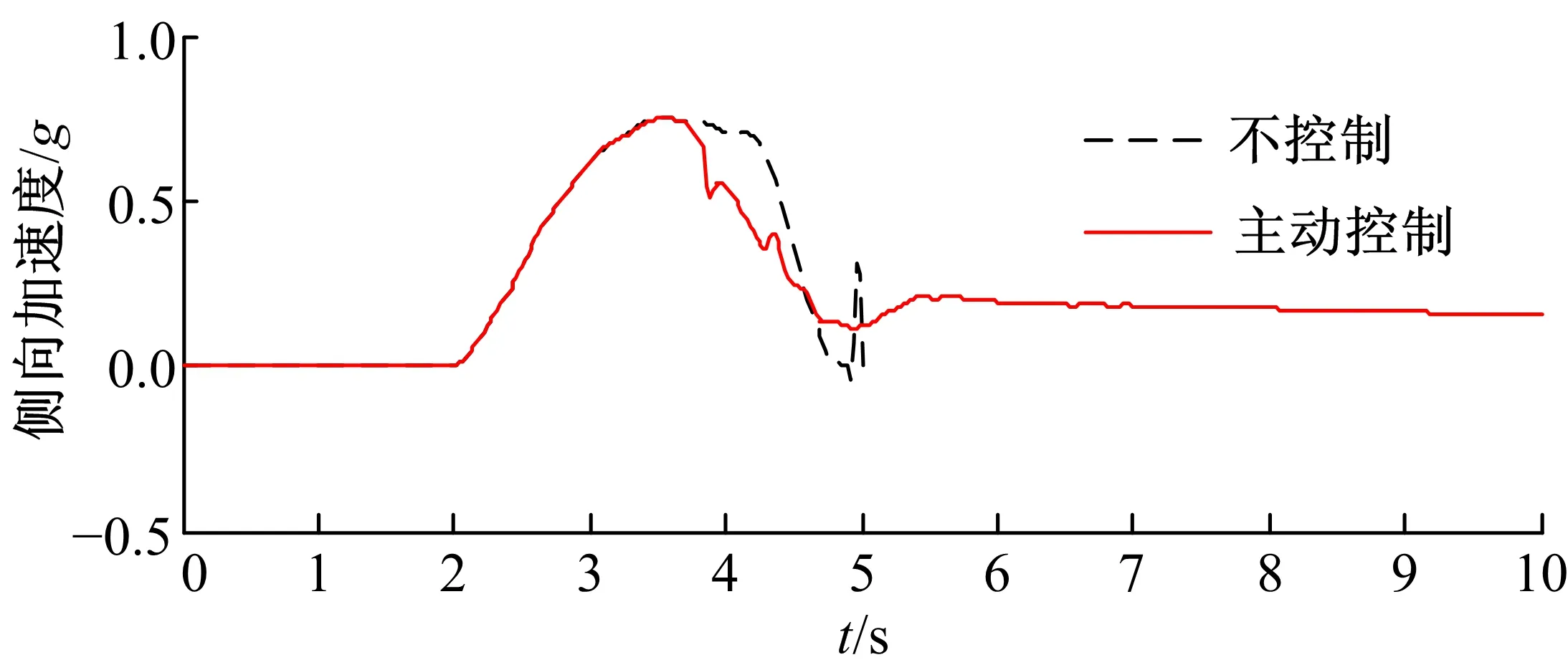
图11 侧向加速度(阶跃转向工况)Fig.11 Lateral acceleration(step steering condition)
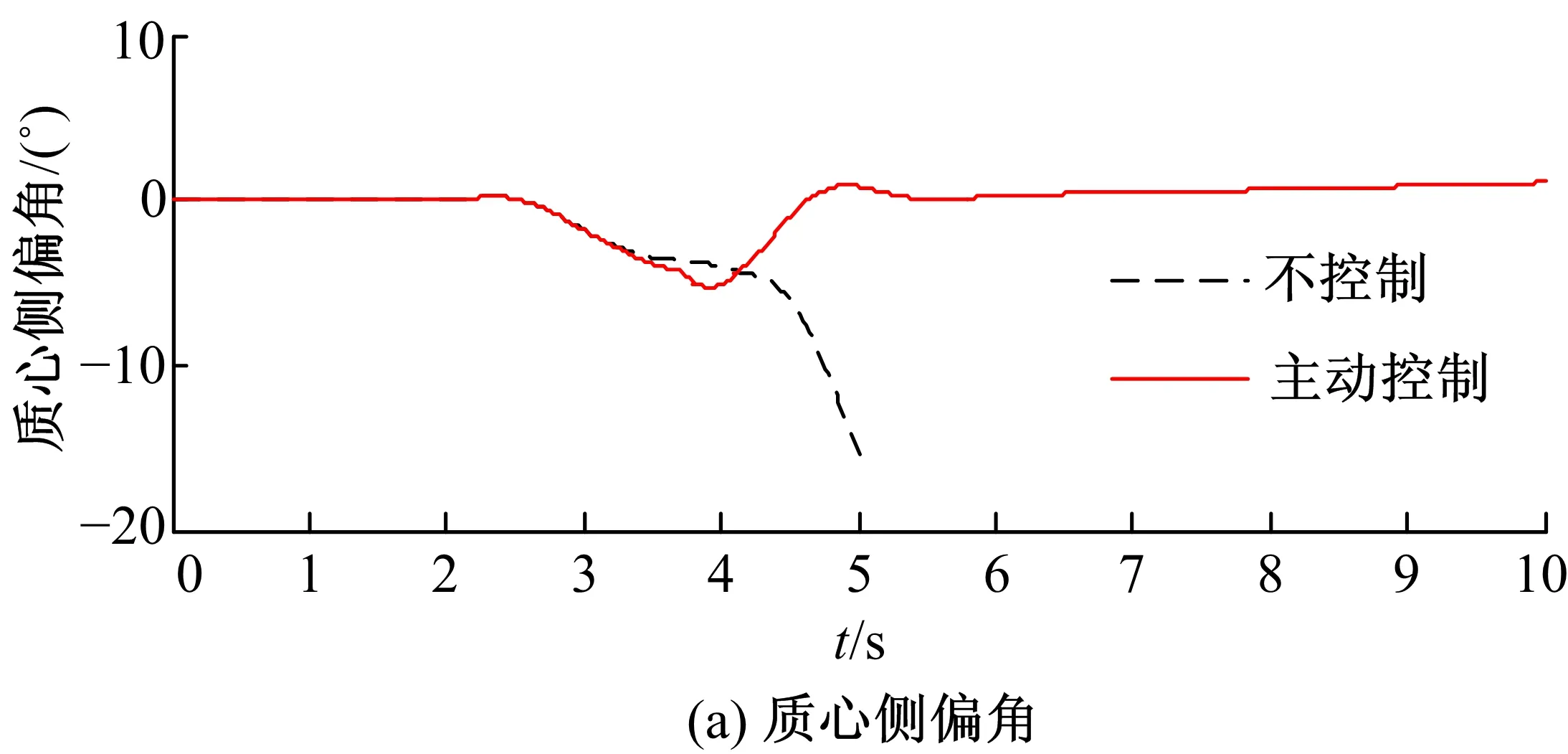
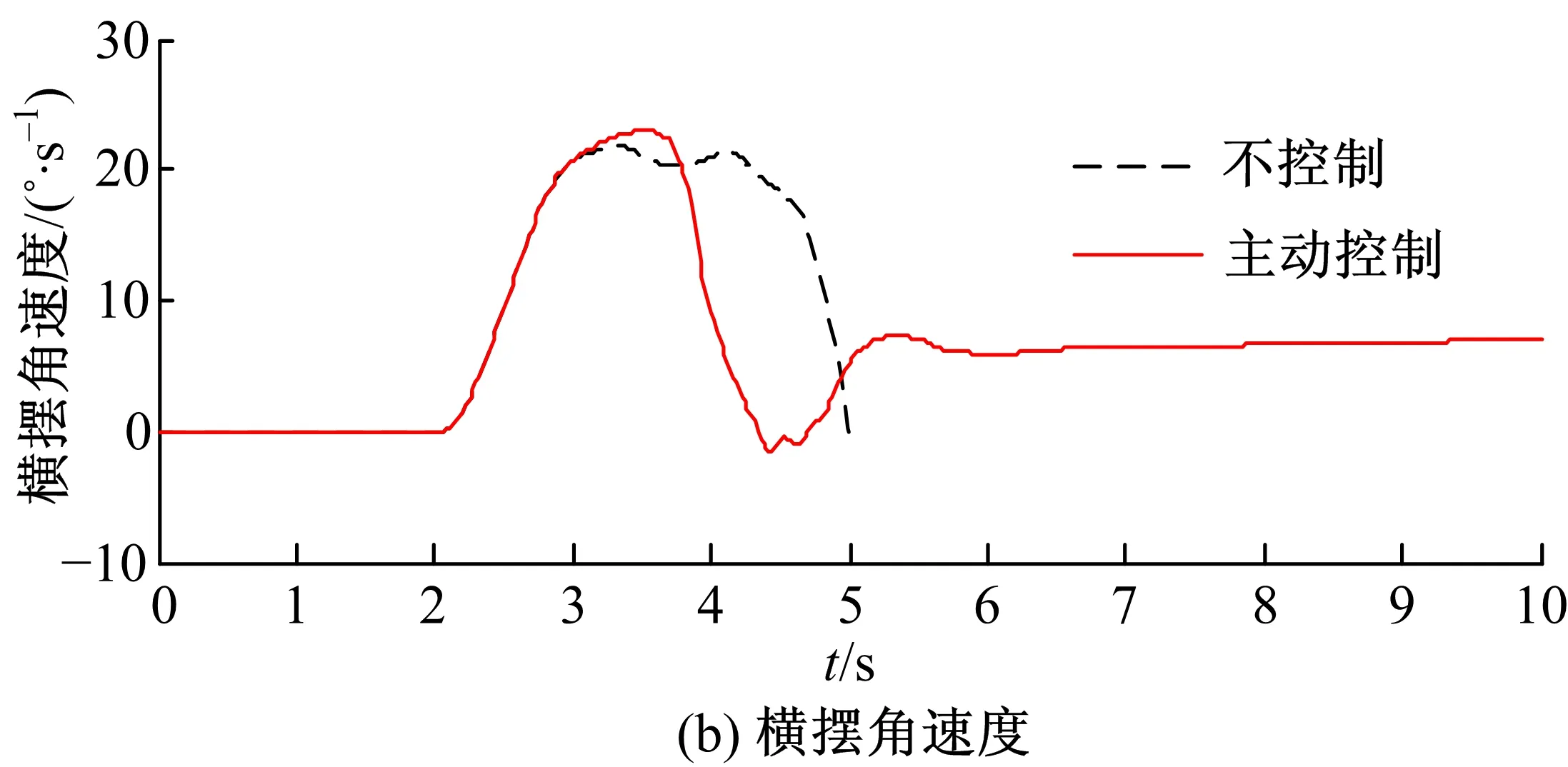
图12 质心侧偏角与横摆角速度(阶跃转向工况)Fig.12 Centroid side-slip angle and yaw rate (step steering condition)

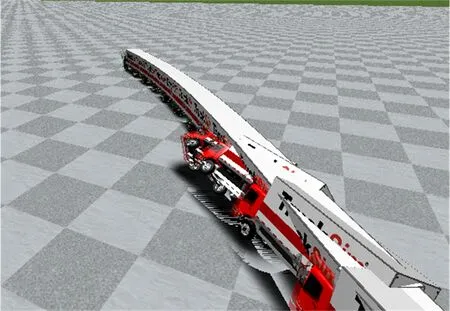
图13 控制前、后车辆行驶状态TruckSim动画 (阶跃转向工况)Fig.13 Vehicle animation at TruckSim before andafter control(step steering condition)
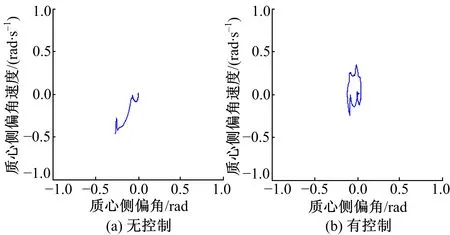
图相平面图(阶跃转向工况)Fig.14 β-phase plane(step steering condition)
4.3 鱼钩转向工况仿真
车辆在鱼钩转向工况下的侧倾角、侧倾角速度、侧向加速度、质心侧偏角和横摆角速度在控制前后的曲线对比,如图15~图17所示。由图15~图17可知,未施加主动防侧翻控制时,车辆行驶1.3 s左右失去稳定性,在4 s时完全侧翻,仿真测试停止。在施加了主动防侧翻控制后,被控车辆各项稳定性指标均有明显的减小,并稳定在相对较低的数值范围内。
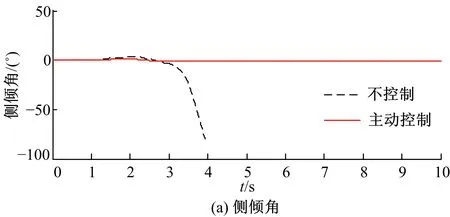
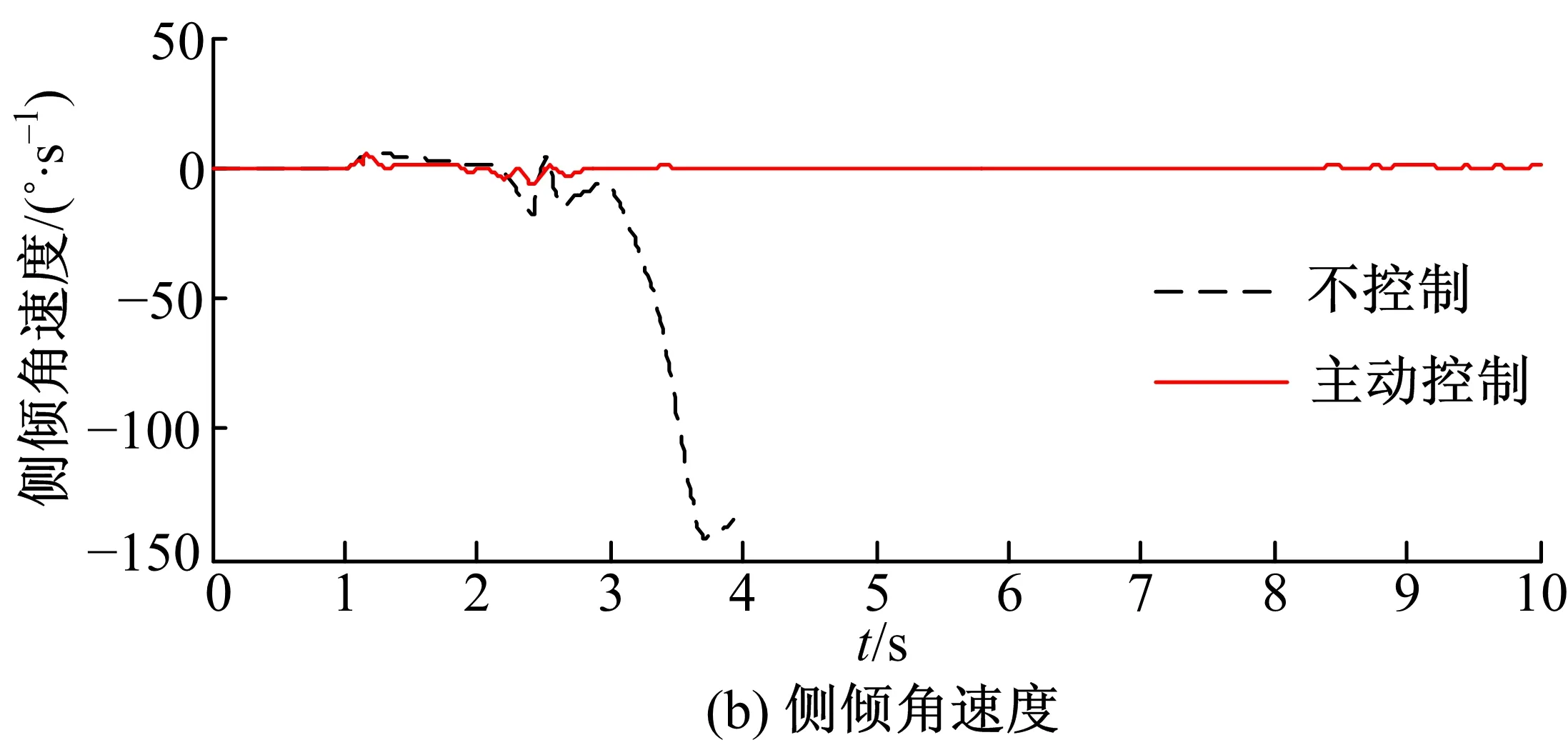
图15 侧倾角与侧倾角速度(鱼钩转向工况)Fig.15 Roll angle and roll angle velocity(fishhooksteering condition)
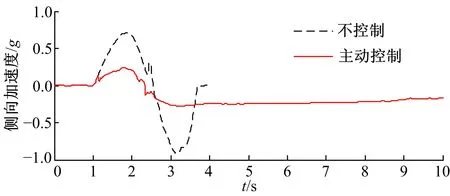
图16 侧向加速度(鱼钩转向工况)Fig.16 Lateral acceleration(fishhook steering condition)
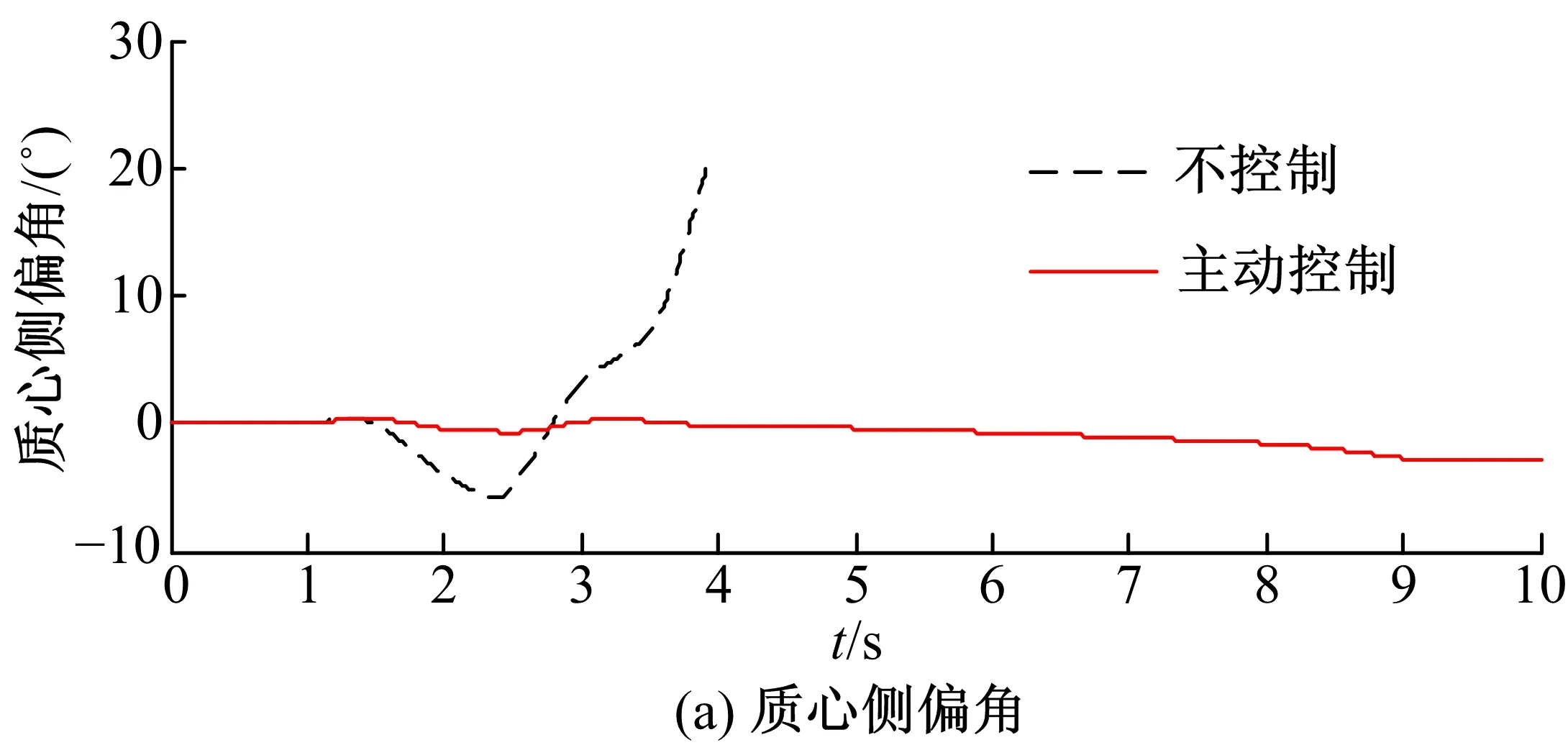
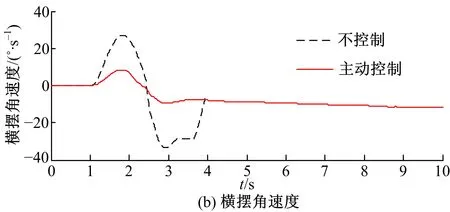
图17 质心侧偏角与横摆角速度(鱼钩转向工况)Fig.17 Centroid side-slip angle and yaw rate(fishhooksteering condition)


图18 控制前、后车辆行驶状态TruckSim动画 (鱼钩转向工况)Fig.18 Vehicle animation at TruckSim before andafter control(fishhook steering condition)
4.4 轮毂液压系统仿真结果
4.4.1 阶跃转向工况
阶跃转向工况,系统处于过多转向状态,且由右前轮施加主动制动力矩,如图20所示,motor_1
图相平面图(鱼钩转向工况)Fig.19 β-phase plane(fishhook steering condition)
表示右前轮液压泵/马达;motor_2表示左前轮液压泵/马达。图21为液压泵/马达转矩跟随效果,可见在所设计的前馈+反馈控制器调节下,液压泵/马达能够有效跟随目标转矩,控制效果良好。阶跃转向工况下,前轮差动制动过程中蓄能器压力变化以及制动马达的流量变化,分别如图22和图23所示。
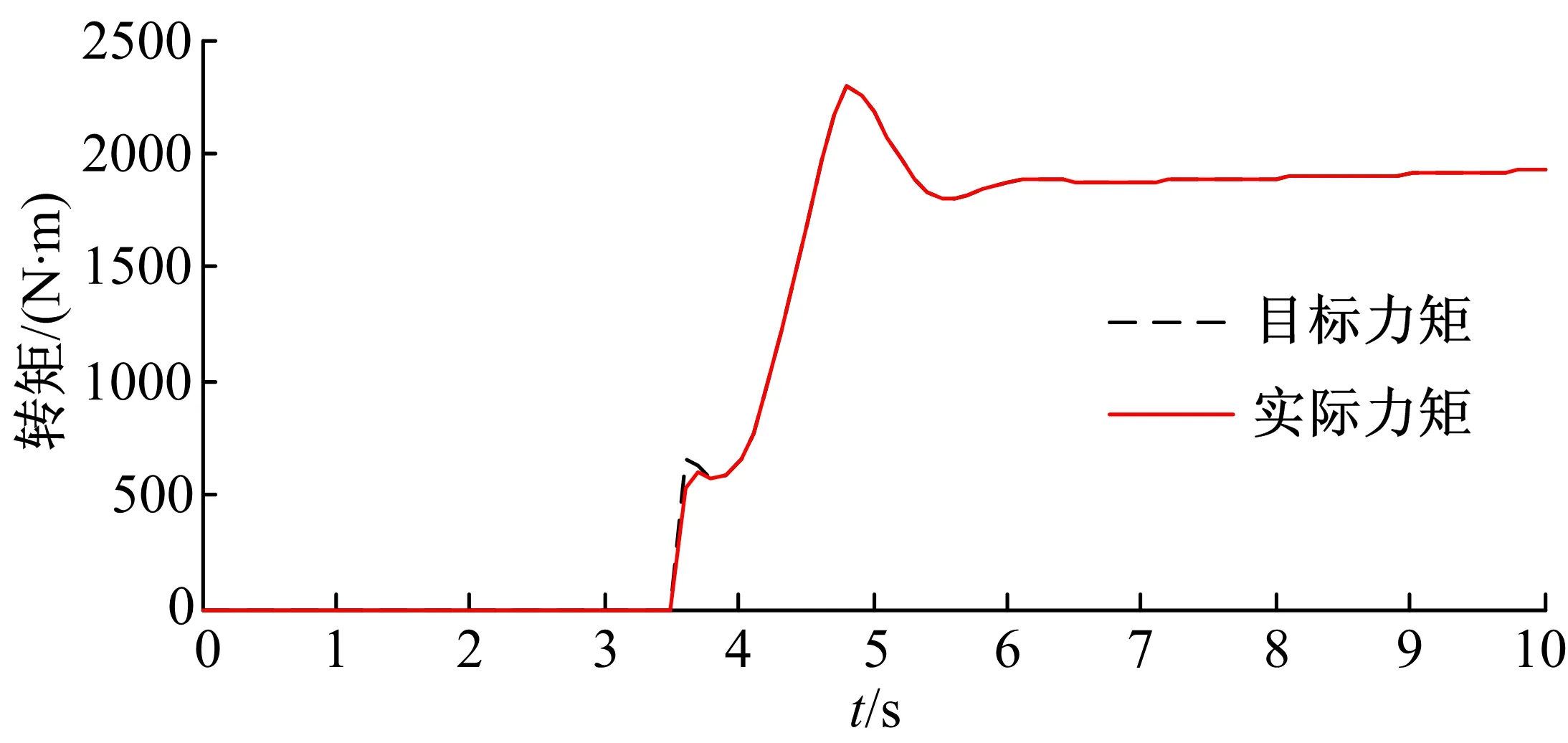
图21 二次元件液压泵/马达制动力矩跟随效果Fig.21 Torque following of the secondary component
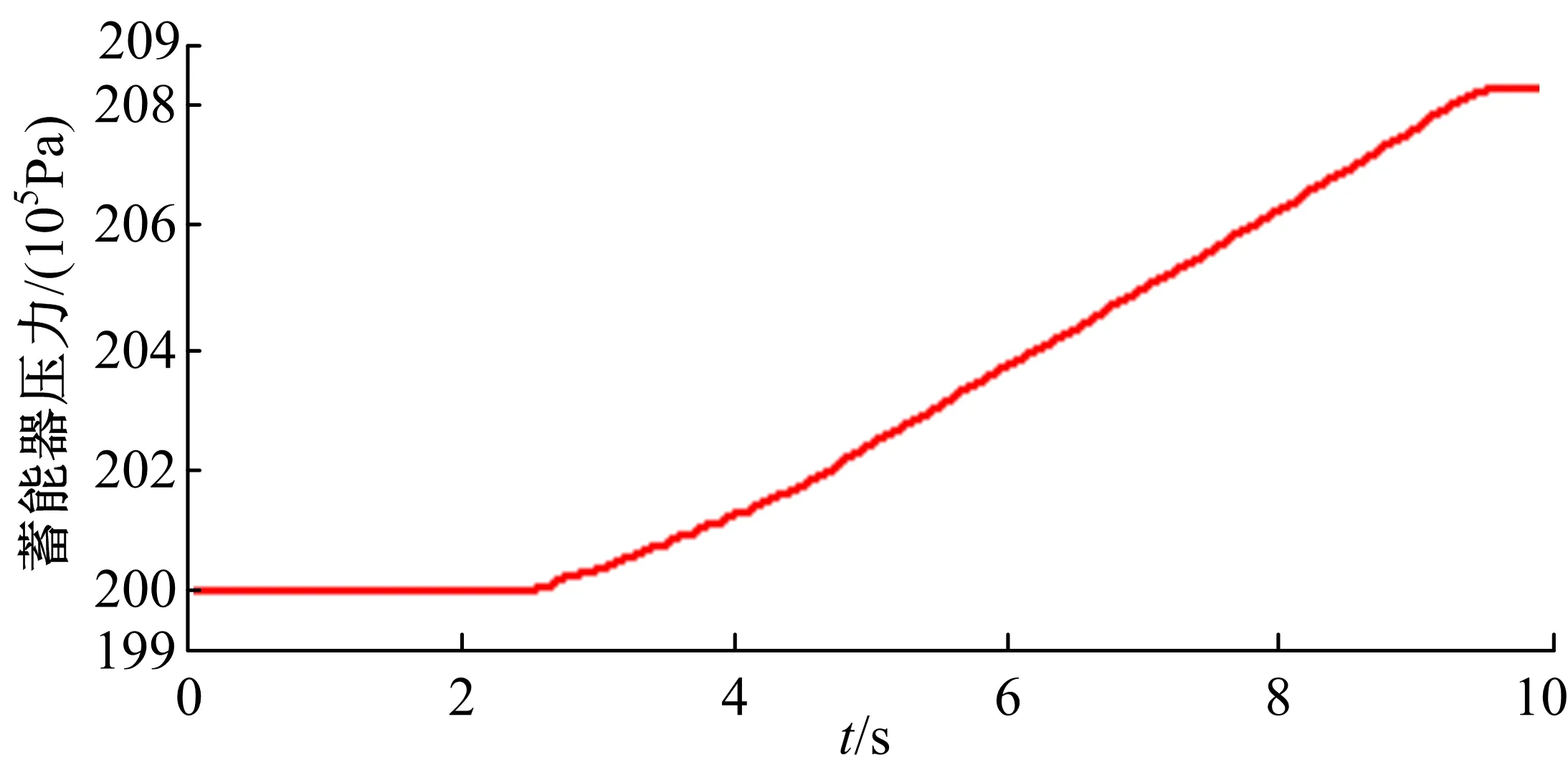
图22 阶跃转向蓄能器压力变化Fig.22 Accumulator pressure at step steering condition
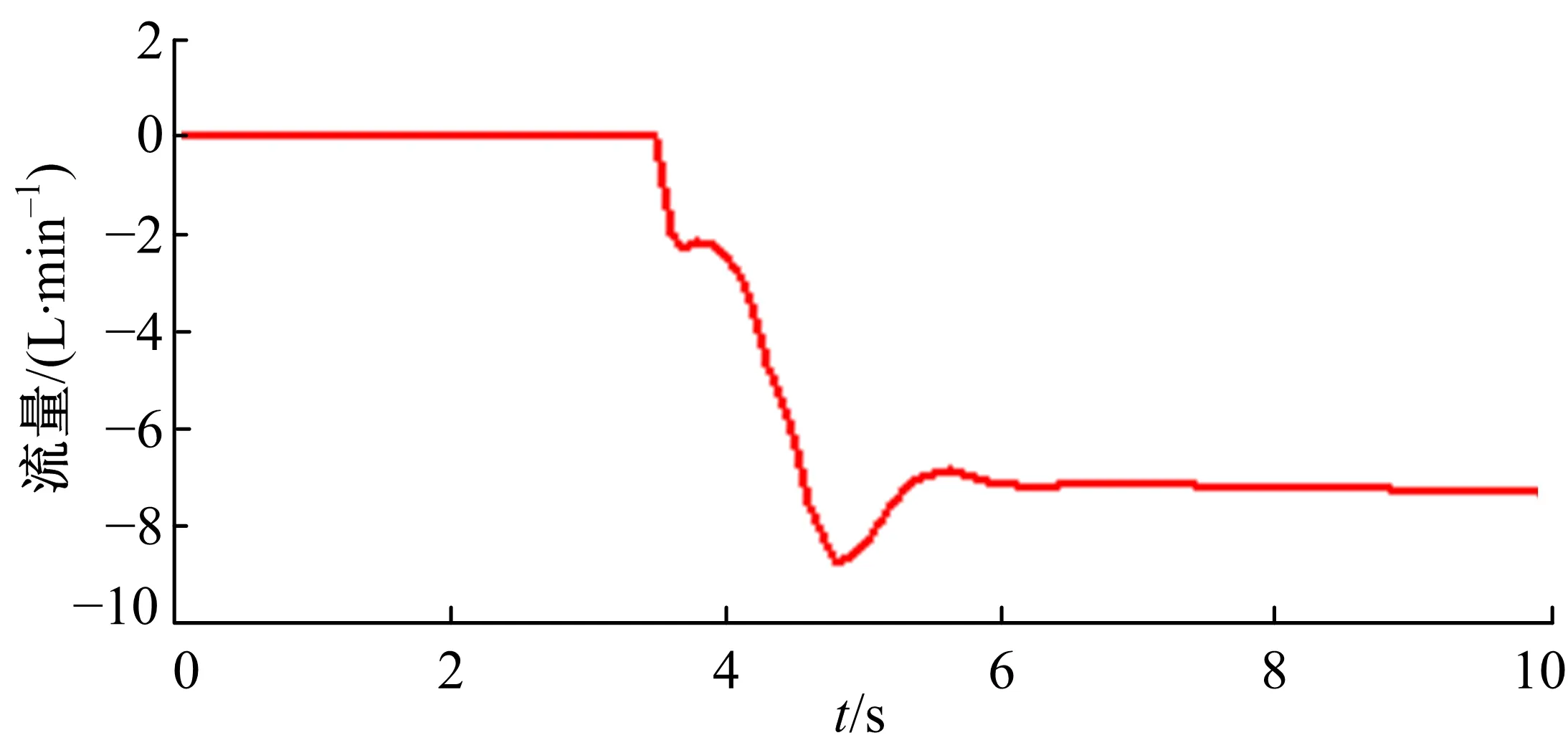
图23 二次元件液压泵马达流量变化Fig.23 Flowrate variation of the secondary component
4.4.2 鱼钩转向工况
鱼钩转向工况,系统处于过多转向状态,先由右前轮施加主动制动力矩,在前轮转角小于0后,由左前轮施加主动制动力矩,如图24所示。根据图25,鱼钩转向工况下,二次元件液压泵/马达转矩依然能够很好地跟随控制目标。鱼钩转向工况下,前轮差动制动过程中蓄能器压力变化以及制动马达的流量变化,分别如图26、图27所示。
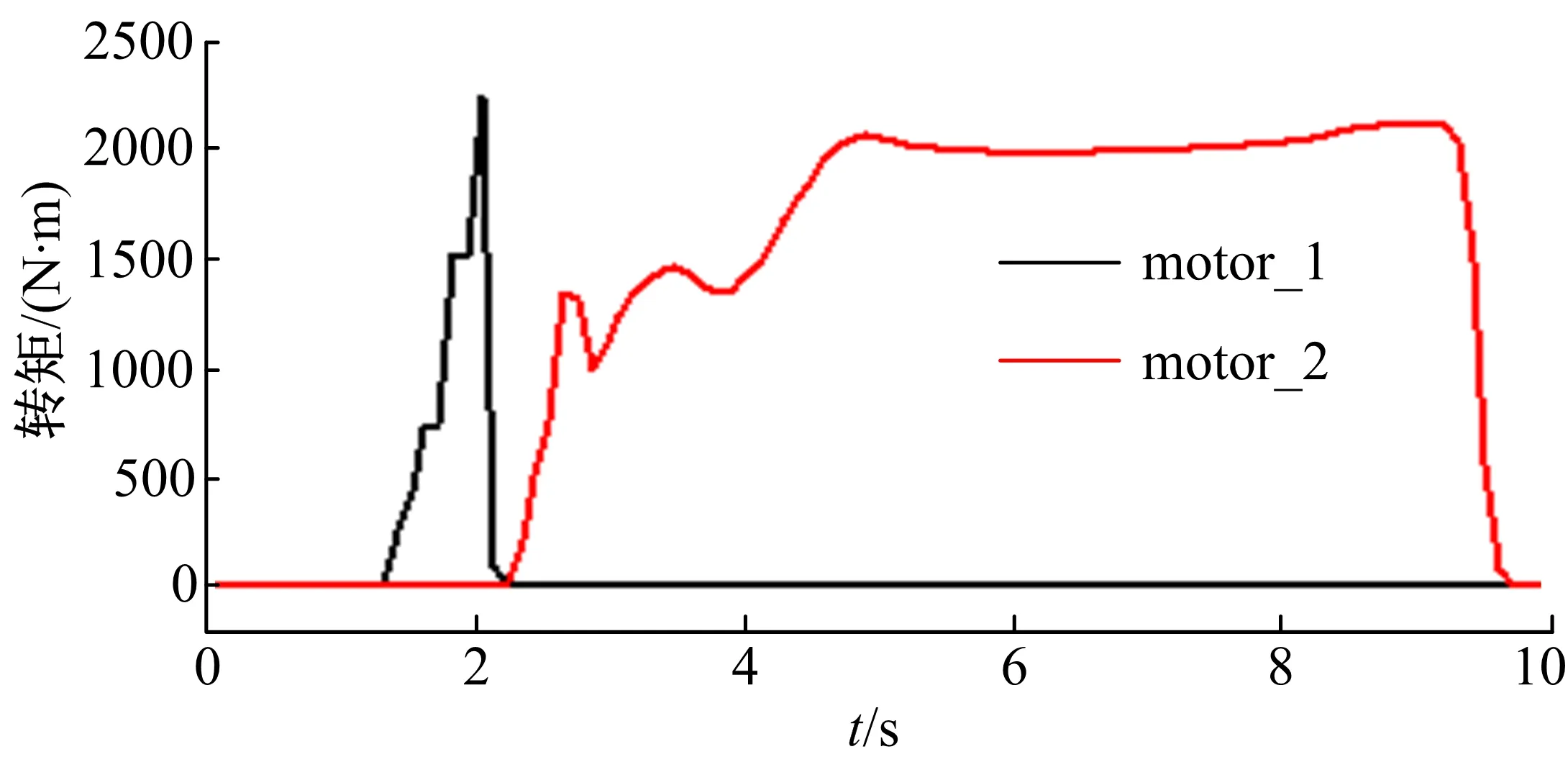
图24 前轮二次元件液压泵马达制动力矩输出Fig.24 Braking torque of the secondary component
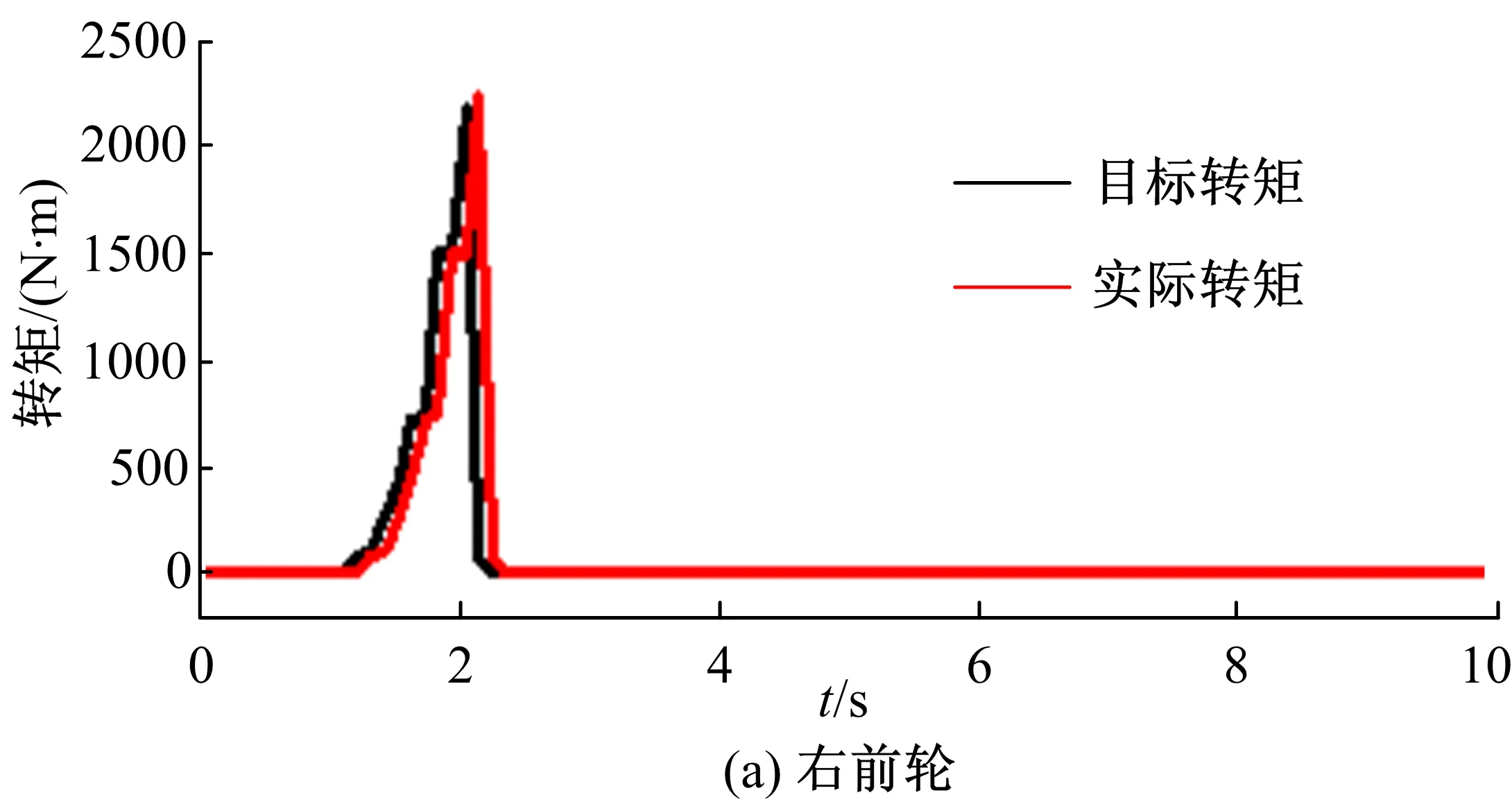
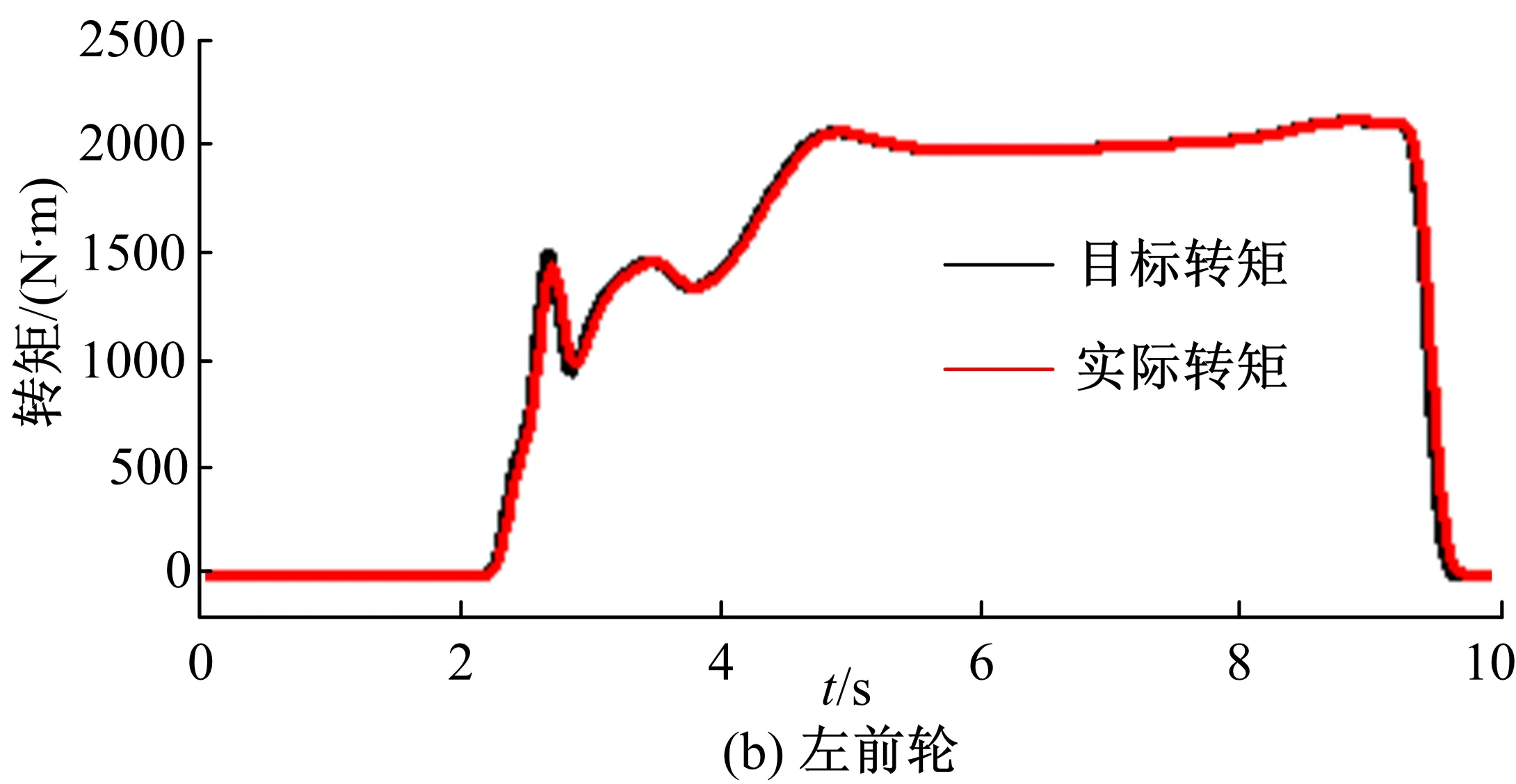
图25 二次元件液压泵马达制动力矩跟随效果Fig.25 Torque following of the secondary component
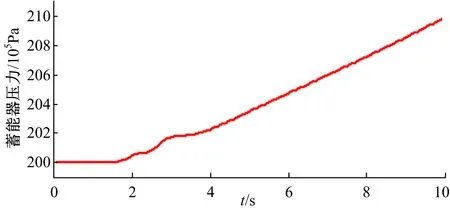
图26 鱼钩转向蓄能器压力变化Fig.26 Accumulator pressure at hook steering condition
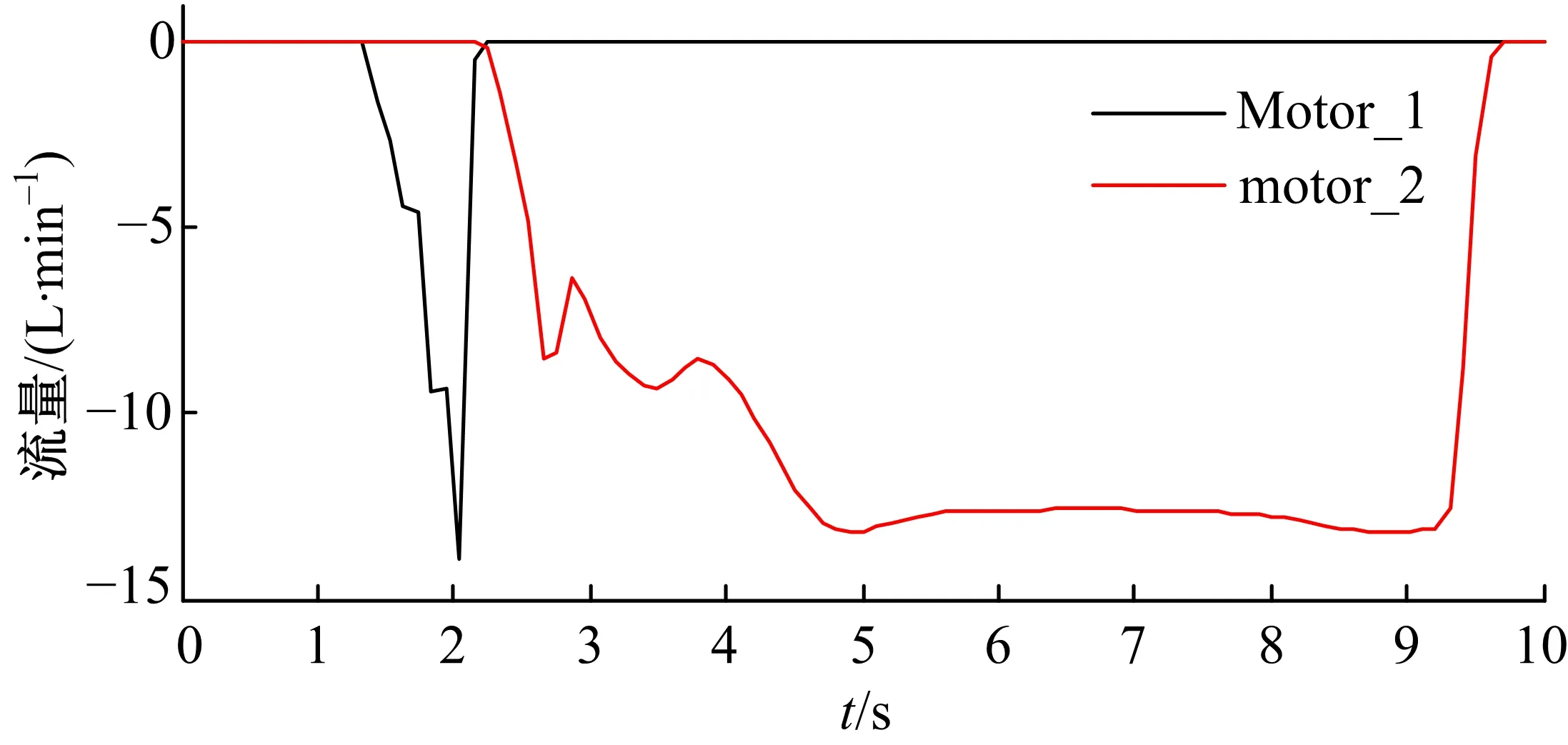
图27 二次元件液压泵马达流量变化Fig.27 Flowrate variation of the secondary component
4.4.3 主动制动能量回收
利用车辆前轮二次元件轮毂液压泵/马达再生制动功能实现主动防侧翻控制过程中,通过蓄能器回收能量如表2所示。阶跃转向工况下,回收能量为23.76 kJ;鱼钩转向工况下,回收能量为18.24 kJ。所回收的能量可用于短时助力,提高车辆性能。
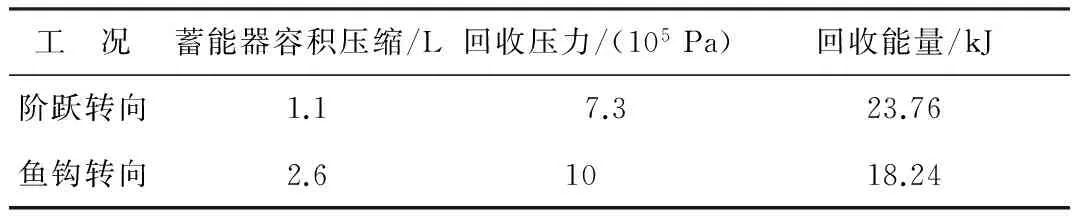
表2 主动制动能量回收Table 2 Energy recovery by active braking
5 结 论
(1)基于轮毂液压混合动力重型商用车功能特点,提出基于前轮轮毂液压泵/马达差动制动的主动防侧翻控制方案,利用安装于车辆前轮的二次元件液压泵/马达的再生制动实现防侧翻控制。
(2)基于线性二次型最优控制原理设计的差动制动防侧翻控制算法,能够在阶跃转向和鱼钩转向两种典型工况下,显著提高轮毂液压混合动力重型商用车的侧倾稳定性,有效避免侧翻事故的发生。
(3)所设计的液压泵/马达前馈+反馈转矩控制器,可以有效调节二次元件液压泵/马达的制动力矩,保证制动稳定性,在实现防侧翻作用的同时可以回收部分制动能量:阶跃转向工况可回收能量23.76 kJ,鱼钩转向工况下可回收能量为18.24 kJ。
[1] Jarossi Linda, Matteson Anne, Woodrooffe John. Trucks involved in fatal accidents factbook 2007 [J]. Buses, 2010 , 48(4): 519.
[2] Solmaz S, Corless M, Shorten R. A methodology for the design of robust rollover prevention controllers for automotive vehicles with active steering [J]. IEEE Conference on Decision & Control, 2007, 80 (11):1739-1744.
[3] Farazandeh A, Ahmed A K W, Rakheja S. Performance analysis of active independent front steering (AIFS) for commercial vehicles with greater lateral load shift propensity [J]. SAE International Journal of Commercial Vehicles, 2013, 6(2): 288-300.
[4] Chung T, Yi K. An investigation into differential braking strategies on a banked road for vehicle stability control [J].Journal of Automobile Engineering, 2007, 221(4): 443-455.
[5] 于志新, 宗长富, 何磊, 等. 基于 TTR 预警的重型车辆防侧翻控制算法[J]. 吉林大学学报: 工学版, 2009,39 (增刊2): 251-254.
Yu Zhi-xin, Zong Chang-fu, He Lei, et al. Algorithms of anti-rollover control for heavy vehicle based on TTR warning [J]. Journal of Jilin University (Engineering and Technology Edition), 2009,39 (Sup.2): 251-254.
[6] 谢兆夫, 赵亮, 郭孔辉,等. 重型车辆的差动制动防侧翻控制[J]. 中国机械工程, 2015, 26(24): 3402-3407.
Xie Zhao-fu, Zhao Liang, Guo Kong-hui, et al. Differential braking-based anti-rollover control for heavy-duty vehicle [J]. Chinese Mechanical Engineering, 2015, 26(24): 3402-3407.
[7] Parida N C, Raha S, Ramani A. Rollover preventive force synthesis at active suspensions in a vehicle performing a severe maneuver with wheels lifted off [J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 15(6):2583-2594.
[8] Li H, Liu H, Gao H, et al. Reliable fuzzy control for active suspension systems with actuator delay and fault [J]. IEEE Transactions on Fuzzy Systems, 2012, 20(2):342-357.
[9] Lee S, Yakub F, Kasahara M, et al. Rollover prevention with predictive control of differential braking and rear wheel steering[C]∥Proc of 6th IEEE Int Conf Robotics, Automation and Mechatronics,Manila,Philippines,2013:144-149.
[10] 赵健, 郭俐彤, 朱冰,等. 基于底盘集成控制的轻型汽车防侧翻控制[J]. 汽车工程, 2014, 36(3):334-339.
Zhao Jian, Guo Li-tong, Zhu Bing, et al. Roll control of light vehicles based on integrated chassis control [J]. Automotive Engineering, 2014, 36(3):334-339.
[11] 贺辉, 宋大凤, 杨南南, 等. 轮毂马达液驱系统控制与仿真[J]. 吉林大学学报: 工学版, 2012,42 (增刊1): 27-31.
He Hui, Song Da-feng, Yang Nan-nan, et al. Control and simulation of hydraulic in-wheel motor propulsion system [J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(Sup.1): 27-31.
[12] 李胜, 宋大凤, 曾小华, 等. 重型卡车轮毂马达液压 驱动系统建模与仿真[J]. 农业机械学报, 2012, 43(4): 10-14.
Li Sheng, Song Da-feng, Zeng Xiao-hua, et al. Modeling and simulation of hydraulic wheel motor propulsion system for heavy truck [J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4): 10-14.
[13] 牛峰. MAN 公司开发重型汽车新型前轮驱动——动液传动系统[J]. 汽车与配件, 2006,44: 44-45.Niu Feng. MAN developed new front wheel drive system for heavy truck-hydra-matic driving system [J]. Automobile & Parts, 2006,44: 44-45.
[14] 马娟丽. LQR 系统最优控制器设计的 MATLAB 实现及应用[J]. 石河子大学学报: 自然科学版, 2005, 23(4): 519-521.
Ma Juan-li. The optimal controller design of LQR and the application of MATLAB [J]. Journal of Shihezi University (Natural Science), 2005, 23(4): 519-521.
[15] 余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009: 144-146.
[16] Walker P D, Zhu B, Zhang N. Nonlinear modeling and analysis of direct acting solenoid valves for clutch control [J]. Journal of Dynamic Systems, Measurement, and Control, 2014, 136(5): 051023.
[17] Lee J M, Park S H, Kim J S. A robust control of the pressure in a control-cylinder for the variable displacement axial piston pump [C]∥ The 7th Asian Control Conference,Xi′an,China,2009: 1280-1285.
