基于目标识别模块的新型机械臂结构
2018-03-09翁江玮熊小青陈晟郑浩万修其包嘉宇
翁江玮+熊小青+陈晟+郑浩+万修其+包嘉宇

摘 要:为加强机械臂在工作空间上的整体可操作性,优化机械臂兼容目标识别模块的整体机械机构,设计了基于目标识别模块的新型机械臂结构。该机械结构在原有的五自由度机械臂的基础上,提出了目标识别模块结构的优化办法。为避免机械臂与目标识别模块的互相干扰,提高工作效率,采用具有创新型的机械结构与目标识别算法,可以有效地提高机械臂的可操作性。
关键词:机械臂;结构优化;自由度;目标识别
中图分类号:TP241 文献标志码:A 文章编号:2095-2945(2018)07-0112-02
Abstract: In order to enhance the overall maneuverability of the manipulator in the workspace and optimize the integral mechanism of the robot arm compatible with the target recognition module, a new structure of the manipulator based on the target recognition module is designed. On the basis of the original five degree of freedom mechanical arm, the optimization method of target recognition module structure is put forward. In order to avoid the interference between the manipulator and the target recognition module and improve the working efficiency, the maneuverability of the manipulator can be effectively improved by adopting the innovative mechanical structure and target recognition algorithm.
Keywords: manipulator; structural optimization; degree of freedom; target recognition
对基于目标识别模块的机械臂结构来说,机械臂的目标识别模块是一个非常重要的组成部分,机械臂在获得正确的目标信息的情况下,才能控制机械臂完成预定的工作任务。传统的基于目标识别模块的机械臂结构,一般采用固定目标识别模块的设计思路,不利于全方位的机械臂工作。本次计划采用基于opencv的视觉处理库在pc端上完成图像处理,通过调用轻量型图像处理函数和合理配置函数的架构达到简单高效的目标识别定位。
1 机械臂结构设计
基于目标识别模块的新型机械臂结构(见图1)包括底座、第一电机、第一机械臂、第二电机、第二机械臂、第三电机、第三机械臂、第四电机、第一支架、第五电机、第二支架、爪子右、爪子左、第六电机、机架、摄像头架、控制模块;底座用于固定第一电机与第五电机,第一电机的转轴与第一机械臂的一端固定连接;第二电机的转轴与第二机械臂的一端固定连接;第三电机的转轴与第三机械臂的一端固定连接;第四电机的转轴与第一支架的一侧固定连接;第二支架与第一支架的一侧固定连接,且用于固定第五电机;爪子右、爪子左与第五电机的转轴连接;第六电机的转轴与机架的一端固定连接,机架的一端与摄像头架固定连接。
机械臂在工作过程中,控制模块供电启动,驱动第六电机的转轴转动带动机架与摄像头架的运动,目标识别模块捕捉工作范围内的物料状态反馈给控制模块,经过PC端图像数据处理后,控制模块驱动第一电机、第二电机、第三电机、第四电机、第五电机的转轴转动,从而带动第一机械臂、第三机械臂、爪子右、爪子左的运动,实现物料抓取,完成一个周期的运动,此时再重复上述过程。
新型机械臂的结构通过采用了五自由度的机械臂结构,使得机械臂的工作空间更大,同时将目标识别模块外置于机械臂结构外,保证了稳定的工作状态,在后期维护过程当中方便拆卸,且不会造成危险。有利于形成一定規模的模块化设计与生产能力。
1-底座、2-第一电机、3-第一机械臂、4-第二电机、5-第二机械臂、6-第三电机、7-第三机械臂、8-第四电机、9-第一支架、10-第五电机、11-第二支架、12-爪子右、13-爪子左、14-第六电机、15-机架、16-摄像头架、17-控制模块
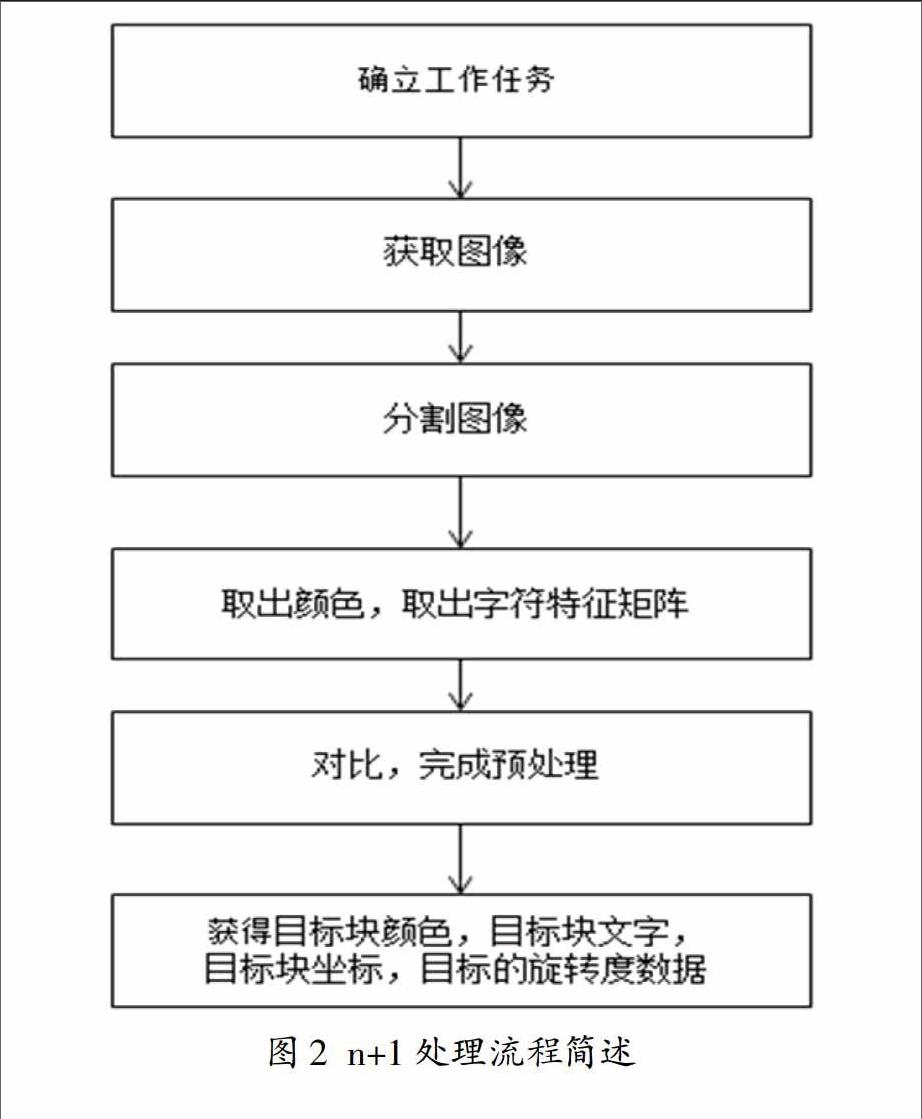
2 n处理方式
(1)不同的情况下,系统需要选择不同的处理目标,针对不同的处理目标需要选取不同处理方案,本研究的处理目标是获得不规则摆放的物块上方的文字符号和物料颜色,和确定目标块的空间坐标。
(2)处理图像来自于高清无畸变彩色摄像头,从成本上考虑定点摄像头俯瞰比跟随机械臂一同运动的摄像头成本更为低廉,且更利于后期的维护。
(3)在目标获取上我们采用分割法,选取面积为2倍物块顶面的矩形为单元,从中心向四周展开网格,以此分割图像,由此产生2大类子图,无边缘切割图像与有边缘切割图像。在分割后对于图像进行背景色垂直和水平投影以区分以上2类子图(背景色是已知的并且和物料颜色有明显区分,因此投影中出现物块部分会有明显的变化,根据相临的子图可以判定出该图是否拥有部分物块,以拥有50%的物块定义为有25%以下定义为无),对于切割到边缘的图像以切割部分向周围扩张调整子图最终调整为完整的尽可能只包括一个物块的子图,并且对每个子图进行编号和坐标确认。随后对于每一个有内容的子图用背景法取出内部物块,并获取边缘,考虑到可能会有较为相近的物块,在这一步操作中分割,本轮操作结束后获得无背景的待处理物块。endprint
(4)对于任一待处理物块由于已经滤除背景,此时可以直接取颜色直方图选取目标颜色筛选出非任务目标的部分减少工作量。随后使用透视法矫正优化待处理图像,同时进行旋转,本段结束后获得近似正方形的待處理物块,(此处不必考虑差值,为方便处理物块上文字采用分割取样,是采用了降低像素的图像校正的方式),根据待处理物块的模型,用背景法取出上面的文字字符,并填入16*16的矩阵。
(5)用距离法将特征矩阵和数据库内的特征矩阵作对比,获得处理结果。
3 结束语
本文给出了基于目标识别模块的新型机械臂结构,在灵活性的基础上提出了一种新的目标识别抓取办法的概念;基于目标识别模块的n处理算法,使优化后的机械臂灵活性达到最优,优化结果可以得出:
(1)机械结构在原有的五自由度机械臂的基础上,为
避免机械臂与目标识别模块的互相干扰,将目标识别模块外设,采用目标识别模块的n处理算法,优化了目标识别模块结构,可以有效地提高机械臂的可操作性。
(2)不同的情况下,系统可以需要选择不同的处理目标,针对不同的处理目标需要选取不同处理方案,采用本研究装置,能够实现全方位的机械臂工作机能。
(3)机械臂结构采用模块化的生产方式,有利于后期的维护,降低算法的开发难度,优化了工业机器人在码垛、装配等领域的技术手段。
参考文献:
[1]贾世元,贾英宏,徐世杰.基于姿态可操作度的机械臂尺寸优化方法[J].北京航空航天大学学报,2015,41(9):1692-1699.
[2]闫继宏,郭鑫,刘玉斌,等.一种模块化机械臂的设计与运动学分析[J].哈尔滨工业大学学报,2015,47(1):21-25.
[3]张国亮,王捷,刘宏.大范围视觉伺服方法在空间机器人上的应用[J].西安交通大学学报,2009,43(1):86-89.
[4]高志发,付志忠,尹鹏.窨井清掏机械臂机构实体建模设计[J].科技创新与应用,2017(11):18.
[5]陈杨,王莉,矫立强,等.基于SimMechanics的机械臂工作空间求解[J].科技创新与应用,2016(24):53.
[6]王亚腾.视觉控制的机械臂在家庭自动化中的应用[J].科技创新与应用,2015(17):14-15.endprint