脉冲激光直线高速态标刻性能研究
2018-03-09余联庆李红军
万 辉,晏 强,余联庆,李红军
(武汉纺织大学机械工程与自动化院,湖北 武汉 430070)
1 引 言
激光标记是指利用高能量密度的激光束在物件表面作永久性标记。由于激光标记具有打标速度快、性能稳定、打标质量好等优点,所以在雕刻、食品等行业得到了广泛的应用[1-3]。直线作为一种基本图元,有着广泛的应用。尤其是在区域填充的场合,直线的标记效果和标记速度对激光打标的效率有着较大的影响。
2 实验设备介绍
目前用于激光打标的脉冲激光器主要是小功率的脉冲光纤激光器,其输出功率一般小于50 W[4],其重复频率范围大多在20 kHz~200 kHz。由于重复频率太大会导致每个激光脉冲所具有的能量降低,因此实际标刻时,激光器的重复频率通常设置较低。
实验的主要设备有瑞科P20QE脉冲光纤激光器,平均输出功率为20 W,重复频率在30 kHz至60 kHz,脉冲宽度在115至140 ns;振镜型号JD1403,10%全范围的响应时间为0.7 ms,1%全范围响应时间0.3 ms。场镜的扫描范围为110 mm×110 mm,焦平面上的弥散斑直径18 μm。实验使用嵌入式的激光标记控制系统,MCU为STM32F103单片机。
3 振镜停留时间与激光脉冲数量
3.1 脉冲个数与脉冲周期
由于脉冲激光器发出的激光是具有一定的重复频率,即每隔一段时间,激光器发出一个激光脉冲。则激光器发出激光的重复周期T可由式(1)计算出来:
(1)
其中,f为激光器设定的重复频率。
因此激光器发出的脉冲个数并非随着时间的增长而增加,而是每增加T时间,激光器发射出1个激光脉冲。因此可以得到图1所示脉冲个数与时间的关系图,其中T表示激光器的脉冲周期,T的值可由式(1)计算,N表示脉冲个数。
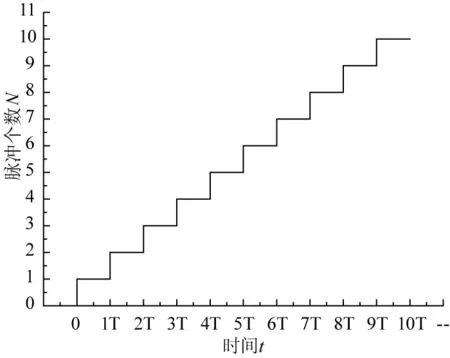
图1 重复频率与脉冲个数的时间关系
3.2 脉冲间隙时间
由于一个激光脉冲持续的时间并不等于激光器的重复周期,这会使相邻两个激光脉冲间出现一段空白时间,在这段时间内激光器不发射激光。这段空白时间在本文中称为脉冲间隙时间,根据间隙时间产生原理,间隙时间可由式(2)计算:
tg=T-tp
(2)
式(2)中,tg表示脉冲间隙时间,T表示脉冲周期,tp表示脉冲宽度。
由于用于脉冲激光器发出激光的脉冲宽度普遍较小,参考实验所使用的脉冲光纤激光器的脉冲宽度115 ns至140 ns。而激光器的重复周期最短时间在重复频率最大时获得,即实验所使用的激光器重复频率设置在60 kHz,激光器的脉冲周期最小,T=16667 ns,远大于140 ns,因此脉冲间隙时间与激光的脉冲周期非常接近,即脉冲间隙tg≈T。
3.3 振镜最短等待时间
当需要的标记深度越大时,落在同一位置上的激光脉冲个数就要越多,因此振镜在该位置的等待时间就越长。由于相邻激光脉冲间是有间隙的,根据图1可知,当需要N个激光脉冲时,停留时间t在[N×T,N×T+tg)范围内时,激光器发出的脉冲个数始终是N个。因此振镜等待N个激光脉冲的时间,可以根据图1计算出来。
按照XY2-100协议,振镜接受坐标速度最快为2 Mbit/s,而每一个坐标有20 bit数据组成,因此振镜接受一个坐标速度所需时间为10 μs。当于脉冲激光器的重复频率小于100 kHz时,即脉冲间隙时间大于10 μs,因此在脉冲间隙时间内使振镜扫描至下一个扫描点,可以有效提高激光标记速度。因此等待N个激光脉冲的最短时间t可根据式(3)计算:
t=T×n-10
(3)
4 标记点的划分
根据实验振镜工作参数,10%全范围的响应时间为0.7 ms,由于实验使用的场镜范围为110 mm×110 mm,即振镜扫描11 mm所需时间为0.7 ms,则振镜的可达15 m/s。当激光器的重复频率在30 kHz,相邻激光脉冲的间隙时间根据3.2节计算方法,为33.333 μs,在间隙时间振镜继续向前扫描0.5 mm,这就会使标记的直线出现明显的间隙。图2所示为振镜扫描速度较快时,标记出的不连续直线。因此在脉冲间隙时,需控制振镜的扫描距离。当扫描距离太小会降低振镜激光标记速度;当扫描距离太大时,会使标记出的直线呈离散点状。

图2 振镜扫描速度太快时标记出的直线
由于直线实际上是由一系列点组成的,当这些点的间距非常小时,人眼分辨不出其中的间隙,认为直线是连续的。而人眼在明视距离(250 mm)处的分辨率为100 μm,因此以人眼分辨率为相邻待标点的圆心距较为合适,即直线上相邻标记点的圆心距为100 μm。图3所示为直线分解成点的示意图。当标记直线时,使振镜依次扫描过每一个待标记点,并标记该点,当全部待标记点被标记出来后,标记出的痕迹呈现连续的直线[5]。

图3 直线上待标点的划分
数字振镜使用XY2-100协议进行高精度的激光位置控制[6],XY2-100协议所使用的XY坐标范围为0~65535,而激光标刻的幅面大小通常是由场镜决定,常用场镜的扫描范围从50 mm×50 mm至500 mm×500 mm不等,因此在振镜坐标系中,每1个单位所代表的实际长度也不一样。实验中使用场镜的扫描范围为110 mm×110 mm,因此可由式(4)算出振镜坐标系中的长度单位与国际长度单位的转换:
(4)
其中,S为国际单位长度,L为场镜场镜的扫描边长,x为振镜坐标系中长度。实验中使用场镜幅面的边长,因此L=110 mm,令x=1,即可计算出振镜坐标系中1个单位长度对应的长度约为1.68 μm。
100 μm在振镜坐标系中的长度根据式(4)计算为59.52,由于XY2—100协议规定的坐标值为整数,因此取D=60,即直线上相邻两个标记点的圆心距在振镜坐标系中的长度为60(约等于0.1 mm)。
5 直线的标刻
由于直线被分解为一系列的标记点,需要逐个点进行激光标记,直线上点坐标的计算效率越高,直线的标记速度越快。振镜逐个扫描过每个标记点,这一过程与光栅显示系统显示直线的过程相似,因此实验选用DDA算法(数值微分法)计算每个待标点的坐标[7-8]。
设直线的方程为(5)所示,直线上的一个待标点坐标为(xk,yk),下一个待标点坐标为(xk+1,yk+1)。
y=m×x+b
(5)
当直线的斜率绝对值m<1时,取x作为自变量y作为因变量(当m>1时,取y作为自变量,x作为因变量)。Δx和Δy表示直线上相邻两个标记点的坐标增量,如式(6)所示。由于两个标记点的圆心距为60,可以得到式(7)。由式(5)、式(6)和式(7),可推导出式(8)。
Δx=xk+1-xk
(6)
Δx2+Δy2=602
(7)
(8)
根据以上推导过程,即可计算出直线上相邻两个待标点的坐标增量,根据输入的直线起点和终点坐标,即可依次计算出直线上每个标记点的坐标,如式(9)和式(10)所示,由于计算出Δx和Δy可能为小数,因此需要对计算的坐标值取整。根据直线的起点坐标,即可计算出直线上每一个点的坐标。
xk+1=[xk+Δx]
(9)
yk+1=[yk+Δy]
(10)
6 直线标记效果与分析
6.1 标记出的直线效果
图4(a)所示使用上述原理,激光器的重复频率在30 kHz时标记出的直线效果图,图4(b)为图4(a)所示直线的局部放大图,从图4(b)中的刻度可以看出,相邻两个激光脉冲打在物体表面留下标记点圆心距约为0.1 mm,相邻两个标记点之间有一小段的间隙。

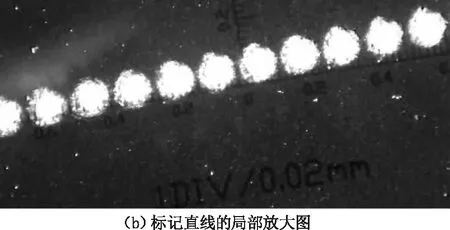
图4 重复频率为3 kHz时标记出的直线效果图及局部放大图
图4(a)所示,使用0.1 mm扫描间距标记出的直线是连续的,因此该直线算法对于脉冲激光标记系统是有效的。
6.2 激光标记点的直径偏大原因
在图4(b)所示的激光标记出的痕迹可以看出,标记点的直径明显大于场镜焦平面弥散斑直径的18 μm。图5所示,为电子显微镜下拍摄到的一个激光脉冲打在物体表面留下的痕迹。图中亮白区域为激光打出的痕迹,边缘黑色部分是碳化物。
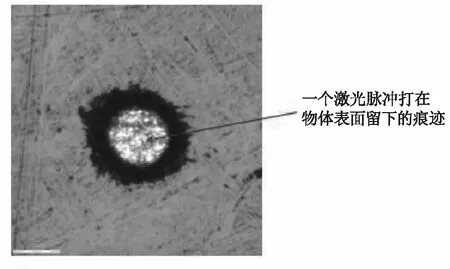
图5 激光打在物体表面留下的痕迹放大1040倍图像
使用30 kHz和60 kHz的重复频率激光打在物体表面,在电子显微镜下测量痕迹的直径,测量到的数据如表1所示。
根据表1可知,激光重复频率越大,则一个激光脉冲打出的标记点越小。由于激光器的输出功率是一定的,重复频率越大,则每个激光脉冲所具有的能量越小;频率越大,则每个脉冲所具有的能量越小。激光脉冲打在物体表面时,能量会向边缘扩散使打出的标记点直径大于18 μm。
同时,受到位置调节精度的影响,物体会在场镜的焦平面附近,这会使激光投射在物体表面的光斑变大,从而使标记出的标记点变大。
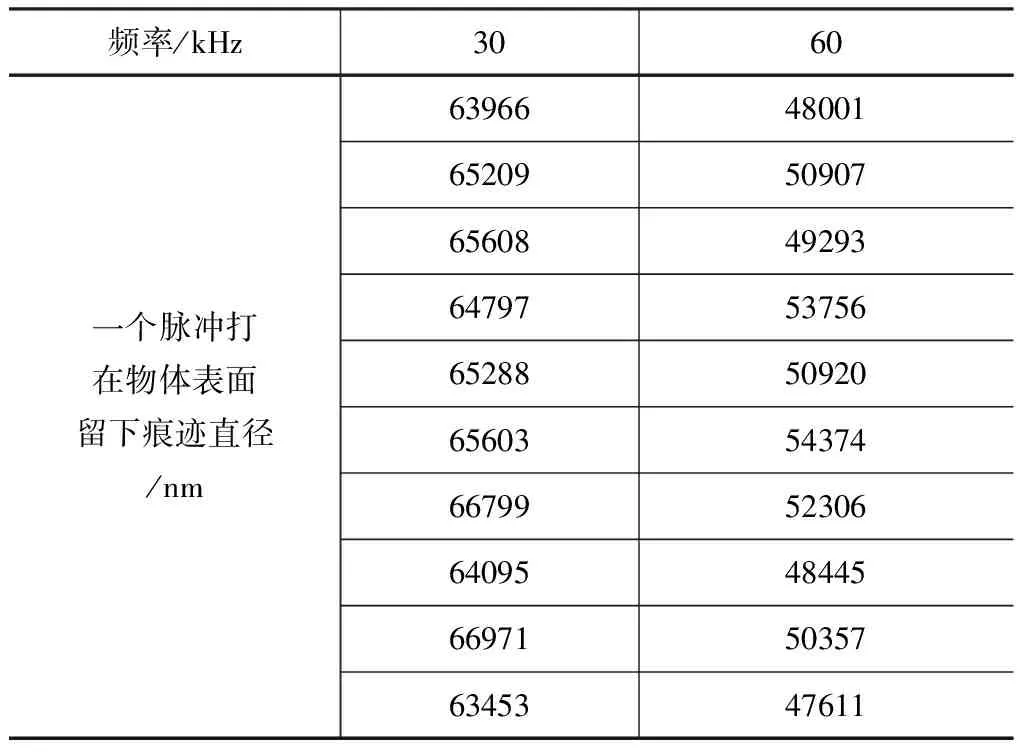
表1 单个激光脉冲打在物体刻蚀出的圆形痕迹直径
6.3 最大标记速度
根据第2节和第3节中的分析可知,不考虑振镜的扫描速度时,直线的标记速度是由激光器的重复频率决定的,由于每一个脉冲点对应的长度为100 μm,单位时间内的脉冲个数越多,则标记速度越快。
因此当激光器的重复频率低于100 kHz时,直线的最大标记速度即可根据式(11)确定,其中N表示直线上每个待标点上需要的脉冲个数,f为激光器的重复频率。当每个标记点需要的脉冲个数为1时,激光器的重复频率最大时,直线的标记速度最快,因此实验使用激光器的重复频率设置为60 kHz时,速度达到最大,为6 m/s。
v=0.1mm×f÷N
(11)
7 结束语
实验所使用的激光器重复频率较低,由于XY2—100协议规定的坐标最大发送速度为10 μs,而激光器重复频率高于100 kHz时,相邻激光脉冲的间距小于10 μs,小于坐标发送速度,因此文中使用方法不适用于重复频率高于100 kHz的脉冲激光器。同时激光标记点的圆心距为0.1 mm是在人眼的明视距离处取得的,在标刻要求较高的场合可以适当减小标记点的圆心距,使标记出的线条连续性更好。目前该直线标记算法已经在作者所在课题组研发的焦距自适应激光清洗系统中得到应用,目前使用状况良好。
[1] ZHOU Yefei.Research on High-speed and High-precision laser marking control system[D].Wuhan:Huazhong University of Science and Technology,2013.(in Chinese)
周叶飞.高速高精度激光标记控制系统研究[D].武汉:华中科技大学,2013.
[2] YAN Jiujiang,WAN Hui,SHI Fujun,et al.research on network laser marking control system of based on embedded[J].Laser & Infrared,2016,46(3):275-278.(in Chinese)
闫久江,万辉,史富君,等.基于嵌入式的网络激光标刻控制系统研究[J].激光与红外,2016,46(3):275-278.
[3] Astarita A,Genna S,Leone C,et al.Study of the laser marking process of cold sprayed titanium coatings on aluminium substrates[J].Optics & Laser Technology,2016,83:168-176.
[4] LOU Qihong.New development of laser technology and its application in photovoltaic industry[J].Infrared and laser engineering,2012,41(12):3187-3192.(in Chinese)
楼祺洪.激光技术新进展及其在光伏产业中的应用[J].红外与激光工程,2012,41(12):3187-3192.
[5] PAN Jiawen,ZHU Dehai,YAN Tailai,et al.Study on the relationship between spatial resolution and mapping scale of remote sensing image[J].Transactions of the Chinese Society of Agricultural Engineering,2005,21(9):124-128.(in Chinese)
潘家文,朱德海,严泰来,等.遥感影像空间分辨率与成图比例尺的关系应用研究[J].农业工程学报,2005,21(9):124-128.
[6] LIAO Ping,CHEN Yongkun.Design of control system of laser marking machine based on STM32[J].Laser & Infrared,2016,46(12):1447-1451.(in Chinese)
廖平,陈永坤.基于STM32的激光打标机控制系统设计[J].激光与红外,2016,46(12):1447- 1451.
[7] ZHANG Weizhong,ZHANG Liyan,PAN Zhenkuan,et al.Curve extraction of B-snake model based on DDA algorithm[J].Chinese Journal of Scientific Instrument,2009,30(3):509-514.(in Chinese)
张维忠,张丽艳,潘振宽,等.基于DDA算法改进B-snake模型的曲线提取[J].仪器仪表学报,2009,30(3):509-514.
[8] Song Y,Huang D,Zeng B.GPU-based parallel computation for discontinuous deformation analysis(DDA) method and its application to modelling earthquake-induced landslide[J].Computers & Geotechnics,2017,86:80-94.
