基于Hough变换的螺母定位研究
2018-03-09金惠兰通讯作者
屈 强,金惠兰(通讯作者)
(天津农学院 天津 300384)
1 引言
工业生产中利用机器代替人工进行上下物料,需要对物料进行定位。机器人手臂要通过视觉系统进行螺母定位并精确抓取目标物,需要精确获取螺母的中心位置。
2 分割背景和螺母
根据已获得的深度图像数据利用MATLAB软件还原数据图像,分割背景和螺母,得到图1。
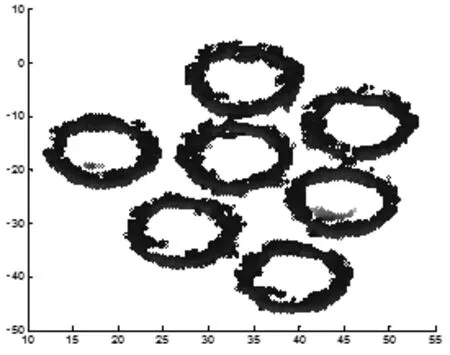
图1 螺母深度图数据处理结果
3 图像的预处理
图1所获取的图像由于受到种种条件限制,往往不能在机器视觉系统中直接使用,必须对原始图像进行校正、噪声过滤等图像预处理[1]因此,我们采用MATLAB软件对所获取的图像进行灰度化、二值化、图像增强、边缘检测等相关处理。见图2。
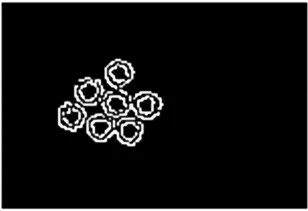
图2 平铺螺母边缘化图
4 基于Hough变换确定中心坐标
经过以上处理后的图形可以认为六边形的螺母边缘己经弱化近乎为一个圆。那么,寻找六边形螺母的中心点即可转化为寻找圆心。Hough变化是目前应用最为广泛的圆检测方法。
Hough算法:Hough变换的圆检测,基于将搜索空间由三维降到二维。检测圆的圆心坐标、半径的确立,是根据圆的几何性质,即圆周上任意两条不平行弦的中垂线相交于圆心来确定圆的三个参数的[2]。基于Hough变换,应用MATLAB软件对图像处理,结果如图3所示。

图3 螺母中心位置确定
得到各圆心的像素坐标为(183.1977,152.2460)、(268.7268,237.6105)、(189.9562,298.4870)、(106.6900,303.3642)、(317.9653,357.4308)、(235.5794,411.3455)、(155.4681,428.1933)。
应用像素坐标与物理坐标之间的转化[3],可得各点物理坐标如表1所示。
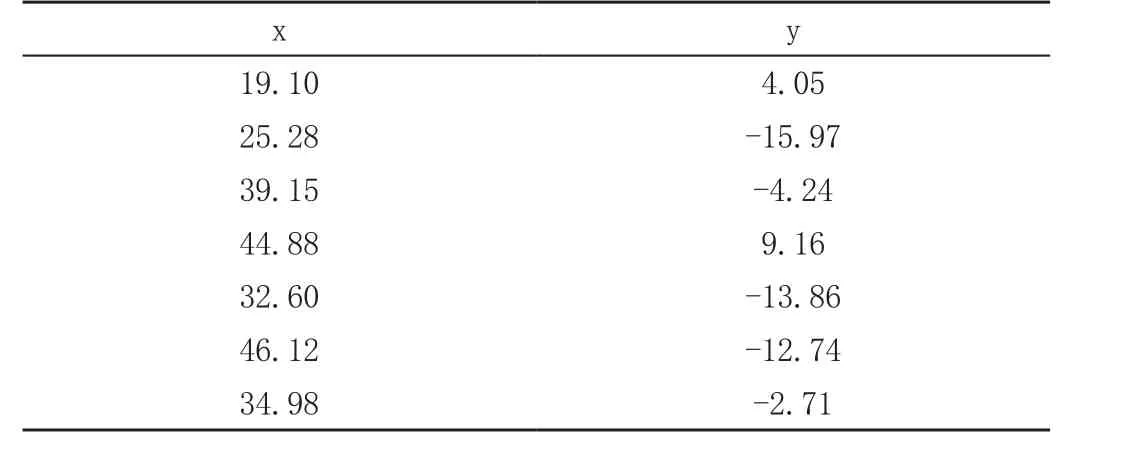
表1 平放螺母中心坐标
5 结论
本文只对平放螺母进行了定位研究,对于叠放螺母定位问题将在另文中进行探讨。总之,通过建立基于Hough变换的定位系统,用机器代替人眼完成测试和判断,可以使得生产线的自动化和智能化程度大大提高。
[1]李睿.基于机器视觉的螺母定位系统[J].机床与液压,,2013,12.第41卷(23).
[2]叶峰.基于有序Hough变换的快速圆检测算法[J].仪器仪表学报,2014.05.
[3]王恒.基于改进Hough变换的圆形物体检测[J].东北大学,2005,11.
