Event-triggered sampling and fault-tolerant control co-design based on fault diagnosis observer
2018-03-07QIUAibingZHANGJingJIANGBinandGUJuping
QIU Aibing,ZHANG Jing,JIANG Bin,and GU Juping
1.School of Electrical Engineering,Nantong University,Nantong 226019,China;
2.School of Automation,Nanjing University of Science and Technology,Nanjing 210094,China;
3.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China
1.Introduction
With the rapid development of digital technology,particularly when various kinds of embedded microprocessors are widely used in industry,it is popular to monitor and control continuous-time plant in discrete-time domain.In these types of systems,system outputs are generally periodically sampled.The periodic sampling pattern can simplify system analysis and synthesis,but it ignores the inter-sample behavior of the system [1] and always leads to a heavy consumption of energy,computation resource, or communication bandwidth [2]. To overcome the drawbacks of periodic sampling,some event-triggered sampling strategies have been proposed recently.The event-triggered sampling means that the sensor performs the sampling action only if the system state or output satisfies some pre-specified conditions[3].Compared with periodic sampling,the event triggered sampling can not only reduce the computation complexity,communication cost,or energy consumptions,but also improve the sensor precision[4]and the control performances[5].The prior event-triggered sampling strategies are generally defined in terms of the system state[6–8],which assumes that all state information is always available.This assumption is not realistic in practice.The extension of state-based event-triggered sampling to output-based one has been investigated.The primary difficulty of the extension lies in how to determine a lower bound of the inter-event times.A mixed event-triggered sampling mechanism was developed in[9]and a lower bound related to the initial state and disturbance is derived by using the hybrid system approach.It is worth pointing out that all the above mentioned event-triggered sampling mechanisms require monitoring the system state or the output constantly.To avoid the continuous detection,self-triggered sampling[10–12]and sampled-data event triggered sampling strategies have been proposed[13].The sampled-data event triggered sampling is also called periodic event-triggered sampling[14–15],in which the event-triggering condition is periodically verified.The period can be regarded as the lower bound of inter-event times.Comparing with self-triggered one,the periodic event-triggered sampling can usually obtain larger sampling intervals.In[13],the event-triggered technique was applied to both sensor and controller nodes to reduce the transmission rates among the sensor,controller,and actuator,and a co-design scheme of the event detector and controller is developed.An observer-based sampled-data event-triggered sampling mechanism was proposed in[14].Both the observer and the predictor are designed in sensor nodes to determine the transmission instant of state estimates,which,however,requires a high computation capability of sensor nodes.The applications of the event triggered technique to different complex systems such as networked control system[16–21]and multi-agent system[22–24]and to robust filtering[25–27]have strongly pushed the rapid progress in this field.The survey papers[3,28–29]give the state of the art in the field of event triggered sampling.
On the other hand,with the increasing hugeness and complexity of modern engineering system,a small fault occurring in any component of a system probably can propagate from one point to another and may further lead to a total breakdown of the whole system.To guarantee the safety and reliability of the dynamic system,fault diagnosis(FD)and fault tolerant control(FTC)techniques have attracted persistent attention in both industry and academia over the last half century[30–32].As for system with event-triggered sampling,some characteristics,such as the nonuniform sampling pattern and the time variant property[33,34],make FD and FTC more difficult.The research works on FD and FTC for event triggered sampled systems are relatively few.In[35],a modified Kalman filter was proposed for fault isolation of stochastic control systems with the send-on-delta sampling scheme.An event-triggered fault detection filter for nonlinear networked control systems was developed in[36].The design idea is to transform the event-triggered fault detection problem into a tractable filtering by combining the faulty system and fault detection filter into an augmented system.The augmented system approach,however,makes the residual coupled with the known control signal,which may lead to the poor detection performance under rapidly changing control.Similar technique has been applied to the integrated design of event-triggered fault detection,isolation and control[37],event-triggered fault detection and control coordinated design of a continuous time networked system[38],and event-triggered fault detection of nonlinear polynomial discrete-time networked system[39].As for event-triggered FTC,a fault tolerant controller under a state-based event-triggered sampling mechanism is designed for the networked control system with probabilistic actuator and sensor faults[40].Recently,in[41],an event-triggered fault tolerant controller was developed for the networked control system with dynamic quantiser.It can be seen that the existing research works on event-triggered FD are con fined to fault detection and isolation.There is no fault estimation,the advanced task of FD,for the event-triggered control system as it is more difficult[31].Furthermore,the existing event-triggered FTC only focuses on passive FTC.It is well known that the active FTC outperforms the passive one since it makes a good use of fault information[32].To the best of the author’s knowledge,the event-triggered active FTC has not been reported yet.These motivate our work.
This paper develops an event-triggered sampling and active FTC co-design scheme based on the FD observer.The event-triggered technique is applied to sensor nodes.More specifically,the sensor transmits the current measurement to the monitor unit only if the difference between the current measurement and previously transmitted measurement,which is named as output transmission error,goes beyond a percentage of the current measurement.Firstly,we design an FD observer to simultaneously estimate both the fault and the system state by using the event triggered sampled outputs.Some H∞constraints between the estimation error and the output transmission error are also established.Then,based on the estimates,the state based static and dynamic fault-tolerant controllers are constructed to co-design the event-triggered mechanism and the fault-tolerant controller with the help of the H∞constraints established above.
The main contributions of this paper are as follows.Firstly,comparing with[35]–[39]which are only concerned with fault detection and isolation for the event triggered sampled system,this paper studies fault estimation which is the advanced task of FD and more difficult[31].Meanwhile,as mentioned above,due to the coupling between the faulty system and the fault detection filter caused by the augmented method,the fault detection filter in[36–39]cannot be decoupled from the known control signal.This deficiency is easily overcomed by using the classical Luenberger FD observer in this paper.The fault estimation accuracy is guaranteed by establishing the constraints between the estimation error and the output transmission error.Secondly,the event-triggered FTC in[40,41]is passive,while the one developed in this paper is active.We use the obtained fault information and the established fault estimation performance constraints to achieve a co-design scheme of the event-triggered sampling mechanism and static or dynamic fault tolerant controller.The proposed scheme can not only maintain the fault estimation and FTC performance,but also greatly reduce the communication burden.
The rest of the paper is organized as follows.Section 2 gives the problem description of discrete-time event triggered control systems.In Section 3,a fault estimation observer is constructed.Then,the event detector and static or dynamic fault tolerant controller are co-designed in Section Section 4.Simulation results are presented in Section 5,which is followed by the conclusion in Section 6.
2.System description and preliminaries
An FD observer based event-triggered FTC strategy is il-lust rated in Fig.1.The sensor,the actuator and the monitor unit which consists of a diagnosis observer and a fault tolerant controller are distributed in different nodes.For reducing network congestion,the sensor employs an event triggered scheme to mediate the date transmissions over the sensor-to-monitor channel.When a fault occurs in the plant or the actuator,the diagnosis observer is presented to detect and estimate the fault.On this basis,an active fault tolerant controller is designed to make the faulty system stable.

Fig.1 Observer-based event-triggered FTC strategy
Consider the following discrete-time plant:

where x(k)∈Rndenotes the state vector,u(k)∈Rmdenotes the input vector,y(k)∈Rpdenotes the output vector,f(k)∈Rqrepresents the constant or time-vary fault to be detected and estimated.A,B,Bfand C are constant matrices of appropriate dimensions,and the pairs(A,B)and(A,C)are controllable and observable,respectively.
An output based event-triggered sampling mechanism for the sensor is given by the following condition:

define the output transmission error as

Substituting(3)into(2)yields

Remark 1The event-triggered sampling mechanism is adopted to avoid unnecessary waste of the communication resource.The parameter δ affects the frequency of signal transmission.It is clear that the larger of δ,the lower frequency of the transmission.If δ=0,the event-triggered sampling is reduced to a periodic time-triggered one.For the following FTC, the parameter δ and controller gains are solved simultaneously.
Finally,we present the bounded real lemma for discrete time system which will play a critical role in the following derivation.
Lemma 1[31] Consider the following discrete-time system
Let γ > 0 be given.The H∞performance index?y(k)?2< γ?w(k)?2is satisfied if and onlyif there exists a matrix P=PT>0 satisfying the following inequality:

3.FD observer design
In this section,we will use the event-triggered output?y(k)to detect and estimate the fault.Firstly,the discrete-time FD observer is constructed as




From(7),we can obtain the error system as

Denote

then it follows that

Theorem 1Consider the discrete-time error dynamics(9).Given γ1,γ2> 0,if there exist two matrices P=PT>0 andsuch that the following conditions hold:

and

then the error dynamics(9)satisfies the H∞performance index?ef(k)?2< γ1??ey(k)?2and?ef(k)?2<γ2?Δf(k)?2,and the observer gain matrix is given by
ProofConsidering Δf(k)=0 in(9)and applying Lemma 1,one has

Remark 2The use of the event triggering technique leads to a loss of sampling information and a change of system property [1,34], which adds some difficulty in the analysis and synthesis of the event-triggered sampled system,especially in state estimation for system with deterministic unknown disturbance.The existing event-triggered state estimation for system with deterministic disturbance is all based on the augmented system approach[25–27].The above mentioned event-triggered FD works[36–39]are carried along the same approach,so that the designed residual cannot be decoupled by the known control signal.To the best of our knowledge,another classical state estimation approach,the Luenberger state observer for the event-triggered sampled system with deterministic disturbance has not been reported yet.The reason may lie in that there is no additional information provided by the event triggered condition since the disturbances are assumed to be deterministic and unknown.The distinguished feature of our proposed FD observer is that it is a Luenberger observer so that the residual is decoupled by the control signal.The proposed FD observer takes good use of the event-triggered condition to guarantee the fault estimation accuracy by establishing a relationship between the fault estimation error and the output transmission error.
Another example to account for the difficulty of state estimation of the event-triggered sampled system with deterministic disturbance is observer-based event-triggered output feedback control. In most existing event-triggered output feedback control schemes [22,42 – 43], the designed Luenberger state observer is placed in the sensor node so that the output at every sampling instant can be used to estimate system state, which, however, requires a high computation capability of the sensor. The requirement is removed in this paper since the FD observer is placed in the monitor unit.
Remark 3Based on the obtained observer parameterwe can infer that the error dynamics(9)also satisfies the performance indexy solving the following LMI:

4.Event-triggered fault tolerant controller design
In this section,we will use the obtained fault and state information to design both static and dynamic fault tolerant controllers.With the help of the above H∞performance,a co-design scheme of the event detector and fault tolerant controller will be developed to guarantee the stability of the faulty system.
4.1 Static fault tolerant controller
First,we construct a static fault tolerant controller as follows:

where K is the controller gain,and the matrix B†satisfies(I-BB†)Bf=0.Substituting(12)into(1)yields

Theorem 2For a given scalar γs> 0,if there exist scalars σ1,σ2,δ> 0 and matrices P=PT> 0 and Y satisfy(14)and(15).Then the faulty system(1)with event triggering mechanism(2)is asymptotically stable and satisfies an H∞performance indexThe controller gain matrix is given by K=N-1Y.


ProofApplying Lemma 1 to(13),one has

Note that

Introducing two free scalars σ1,σ2> 0,the H∞constraints in Theorem 1 and Remark 3 can be described as

Substituting(17)and(18)to(16),one can obtain the following inequality(19).

Using Schur complement,(19)can be converted to the LMI(14)presented in Theorem 1 by setting Y=NK.
Remark 4The key to achieve co-design is the H∞estimation performance constraints(18)in Theorem 2.The two free design parameters σ1,σ2are introduced to guarantee the feasibility of LMI.

4.2 Dynamic fault tolerant controller
Consider the following dynamic feedback fault tolerant controller

where xc(k)∈Rnis the state of the controller,and Ac,Bc,Ccand Dcare the controller parameter matrices of appropriate dimensions.We have
Then the augmented system is obtained as



The matrices P and P-1are partitioned as


Theorem 3For a given scalar γd> 0,if there exist matricesand parameters σ1,σ2,δ> 0 satisfying the following LMI:
Use Schur complement and multiply the matrixon the left-hand side of(25)and its transpose on the right-hand side of(25),and denote


then the closed-loop system is asymptotically stable and satisfies an H∞performance index?x(k)?2<Furthermore,the controller parameters are given as follows:

ProofApplying Lemma 1 to(22),one has


We finally obtain(23). ?
Remark 6In[44],fault estimation and dynamic active FTC for discrete-time nonlinear Lipschitz system have been developed.The nonlinear Lipschitz term in[44]is bounded by a linear term,and thus is handled under the linear system framework.Furthermore,if the Lipchitz term is not considered,the proposed scheme is converted into fault estimation and dynamic FTC for the linear periodic time-triggered system.The main difference between our method and the method in[44]is that ours is event-triggered,while the latter one is periodic time-triggered.If δ=0 in(2)and σ1= σ2=0 in(18),our proposed event triggered fault estimation and dynamic FTC scheme will be degraded into a periodic time-triggered one,in other words,the linear periodic time-triggered fault estimation and dynamic FTC scheme in[44]is a special case of our method.It is worth emphasizing once again that the use of the event-triggered technique will bring benefits in communication burden while guaranteeing fault estimation and FTC performance,which will be demonstrated by simulations next.
5.Simulation example
Considering a linear unstable batch reactor system from[45],the fault is assumed to occur in the second control input channel.The continuous state-space equation is given as follows:

The base sampling period is h=0.1 s,which is also the minimal inter-event interval for the event detector.In the simulation,the following two kinds of faults are used for illustration.

From Theorem 1,one obtains the optimal H∞performance index γ1=2.918 5, γ2=2.918 7,and γ3=3.080 9,and the observer parameters

According to(I-BB†)Bf=0,B†can be computed as

Given γs=2.15,according to Theorem 2,we can obtain three scalars σ1=0.083 1,σ2=0.013 6, η =0.113 9,the event triggering parameter δ=0.048 1,and the controller gain matrix

Simulation results of event-triggered static FTC for the constant fault f1(k)are shown in Fig.2.Meanwhile,to show the superiority of our method in communication con-sumption,the static periodic time-triggered FTC is also provided,where the same H∞performance γs=2.15 is selected for fair comparison.Fig.2(a)shows that both schemes can rapidly estimate the fault with good accuracy.Fig.2(b)shows that the performance of the faulty system is well recovered by both FTC schemes.It can be concluded that both the event-triggered and periodic time-triggered static FTC schemes are able to estimate the fault and recover the faulty system performance perfectly.Simulation results of static event-triggered and periodic time-triggered FTC for the time-varying fault f2(k)are shown in Fig.3.From Fig.3(a)and Fig.3(b),it is clear that the above conclusion holds regardless of the type of fault.The sensor sampling intervals for the constant and time-varying fault are shown in Fig.2(c)and Fig.3(c)respectively.Furthermore,to quantitatively illustrate the superiority of our method,the comparisons on sensor sampling number and root mean square(RMS)of the fault estimation error between periodic time-triggered and event-triggered static FTC have been conducted in Table 1.It can be seen that compared with the periodic time-triggered static FTC,our method provides 38.4%and 33.1%reduction in data transmission for the two faults respectively with the same or at a very small price of fault estimation accuracy.
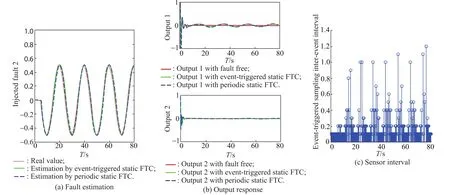
Fig.3 Simulation results of periodic time-triggered and event-triggered static FTC for the time-varying fault f2(k)

Table 1 Comparison on sensor sampling number and RMS of fault estimation error between periodic time-triggered and event-triggered static FTC
As for event-triggered dynamic FTC,choosing the same H∞performance γd=2.15 and using Theorem 3,we can obtain two scalars σ1=0.038 9,σ2=0.038 4,the event parameter δ=0.092 5,and the following parameter matrices.
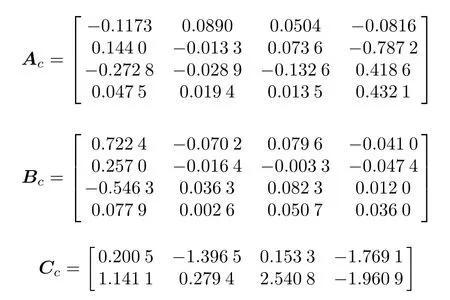

Fig.4 and Fig.5 illustrate the simulation results of periodic time-triggered and event-triggered dynamic FTC for the constant fault f1(k)and the time-varying fault f2(k)respectively.The comparisons on sensor sampling number and RMS of fault estimation error between the two dynamic FTC schemes are shown in Table 2.We can see that the two schemes can also provide similar good fault estimation and FTC performance,and the data transmission has been significantly reduced by the event-triggered scheme.Furthermore,by comparing Table 1 and Table 2,it can be observed that the event-triggered dynamic FTC has lower communication cost than the static one with the similar estimation performance,which may be due to the favorable regulation performance of the dynamic controller.

Table 2 Comparison on sensor sampling number and RMS of fault estimation error between periodic time-triggered and event-triggered dynamic FTC

Fig.4 Simulation results of periodic time-triggered and event-triggered dynamic FTC for the constant fault f1(k)

Fig.5 Simulation results of periodic time-triggered and event-triggered dynamic FTC for the time-varying fault f2(k)
6.Conclusions
The event-triggered sampling mechanism and active FTC co-design criteria are developed in this paper.Firstly,an FD observer is designed to make the fault estimation error satisfying some H∞performance constraints related to event-triggered sampling mechanism.Based on this,the event detector and the state-based static or dynamic fault tolerant controller are co-designed to not only guarantee the stability of the faulty system but also reduce the sensor communication cost.The simulation results demonstrate that the event-triggered dynamic FTC can reduce more communication cost than the static one.The extension of the proposed method for networked control systems with time delays and dropouts is very challenging and has theoretical and practical significance,which will be our primary concern in future work.
[1]CHENT,FRANCISB.Optimal sampled-data control systems.Berlin:Springer,1995.
[2]LEMMON M.Event-triggered feedback in control,estimation,and optimization.Book Chapter,Lecture Notes in Control&Information Sciences,2010,406:293–358.
[3]HEEMELS W,JOHANSSON K,TABUADA P.An introduction to event-triggered and self-triggered control.Proc.of the 51st IEEE Conference on Decision and Control,2012:3270–3285.
[4]ASTROM K,BERNHARDSSON B.Comparison of Riemann and Lebesgue sampling for first order stochastic systems.Proc.of the 41st IEEE Conference on Decision and Control,2002:2011–2016.
[5]MENG X,CHEN T.Optimal sampling and performance comparison of periodic and event based impulse control.IEEE Trans.on Automatic Control,2012,57(12):3252–3259.
[6]TABUADA P.Event-triggered real-time scheduling of stabilizing control tasks.IEEE Trans.on Automatic Control,2007,52(9):1680–1685.
[7]FITER C,HETEL L,PERRUQUETTI W,et al.A state dependent sampling for linear state feedback.Automatica,2012,48(8):1860–1867.
[8]WANG X,LEMMON M.Event-triggering in distributed networked control systems.IEEE Trans.on Automatic Control,2011,56(3):586–601.
[9]DONKERS M,HEEMELS W.Output-based event-triggered control with guaranteed L∞gain and improved and decentralized event-triggering.IEEE Trans.on Automatic Control,2012,57(6):1376–2012.
[10]ANTA A,TABUADA P.To sample or not to sample:self triggered control for nonlinear systems.IEEE Trans.on Automatic Control,2010,55(9):2030–2042.
[11]MAZO M,ANTA A,TABUADA P.An ISS self-triggered implementation of linear controllers.Automatica,2010,46(8):1310–1314.
[12]ALMEIDA J,SILVESTRE C,PASCOAL A M.Self-triggered state-feedback control of linear plants under bounded disturbances.International Journal of Robust and Nonlinear Control,2015,25(8):1230–1246.
[13]MENG X,CHEN T.Event detection and control co-design of sampled-data systems.International Journal of Control,2014,87(4):777–786.
[14]HEEMELS W,DONKERS M.Model-based periodic event triggered control for linear systems.Automatica,2013,49(3):698–711.
[15]HEEMELS W,DONKERS M,Teel A.Periodic event triggered control for linear systems.IEEE Trans.on Automatic Control,2013,58(4):847–861.
[16]CHEN P,YANG T.Event-triggered communication and H∞control co-design for networked control systems.Automatica,2013,49(5):1326–1332.
[17]SHI P,WANG H,LIM C C.Network-based event-triggered control for singular systems with quantizations.IEEE Trans.on Industrial Electronics,2016,62(4):1230–1238.
[18]YU H,ANTSAKLIS P.Event-triggered output feedback control for networked control systems using passivity:achieving L2stability in the presence of communication delays and signal quantization.Automatica,2013,49(1):30–38.
[19]YUE D,TIAN E G,HAN Q L.A delay system method for designing event-triggered controllers of networked control systems.IEEE Trans.on Automatic Control,2013,58(2):475–481.
[20]ZHANGX,HANQ.Event-triggered dynamic output feedback control for networked control systems.IET Control Theory&Applications,2014,8(4):226–234.
[21]ZOU L,WANG Z,GAO H,et al.Event-triggered state estimation for complex networks with mixed time delays via sampled data information:the continuous-time case.IEEE Trans.on Cybernetics,2015,45(12):2804–2815.
[22]ZHANG H,GANG F,YAN H C,et al.Observer-based output feedback event-triggered control for consensus of multi-agent systems.IEEE Trans.on Industrial Electronics,2014,61(9):4885–4893.
[23]ZHOU X,SHI P,LIM C C,et al.Event based guaranteed cost consensus for distributed multi-agent systems.Journal of the Franklin Institute,2015,352(9):3546–3563.
[24]LIU Q,WANGZ,et al.Event-based H-in finity consensus control of multi-agent systems with relative output feedback:the if nite-horizon case.IEEE Trans.on Automatic Control,2015,60(9):2553–2558.
[25]ZHANG X M,HAN Q L.Event-basedH∞filtering for sampled-data systems.Automatica,2015,51(C):55–69.
[26]MENG X,CHEN T.Event-triggered robust filter design for discrete-time systems.IET Control Theory&Applications,2014,8(2):104–113.
[27]DONG H,WANG Z,DING X,et al.Event-basedH∞filter design for a class of nonlinear time-varying systems with fading channels and multiplicative noises.IEEE Tran.on Signal Processing,2015,63(13):3387–3395.
[28]CASSANDRAS C.The event-driven paradigm for control,communication and optimization.Journal of Control and Decision,2014,1(1):3–17.
[29]LIU Q,WANG Z,HE X,et al.A survey of event-based strategies on control and estimation.Systems Science&Control Engineering,2014,2(1):90–97.
[30]DING S.Model-based fault diagnosis techniques:design schemes,algorithms and tools.2nd ed.London:Springer,2013.
[31]ZHANG K,JIANG B,SHI P.Observer-based fault estimation and accommodation for dynamic systems.London:Springer,2013.
[32]ZHOU D,DING S.Theory and applications of fault tolerant control.Acta Automatica Sinica,2000,26(6):788–797.(in Chinese)
[33]QIU A,ZHANG J,GU J.An uncertainty based approach to discrete-time fault estimation observer design for non-uniformly sampled systems.International Journal of Control,Automation,Systems,2017,15(4):1651–1660.
[34]QIU A,JIANG B,WEN C,et al.Fault estimation and accommodation for networked control systems with nonuniform sampling periods.International Journal of Adaptive Control and Signal Processing,2015,29(4):427–442.
[35]LI S,SAUTER D,XU B.Fault isolation filter for networked control system with event-triggered sampling scheme.Sensors,2011,11:557–572.
[36]LIU J,YUE D.Event-based fault detection for networked systems with communication delay and nonlinear perturbation.Journal of Franklin Institute,2013,250:2791–2807.
[37]HAJSHIRMOHAMADI S,DAVOODI M,MESKIN N,et al.Event-triggered fault detection and isolation for discrete-time linear systems.IET Control Theory&Applications,2016,10(5):526–533.
[38]WANG Y,SHI P,LIM C C,et al.Event-triggered fault detection filter design for a continuous-time networked control system.IEEE Trans.on Cybernetics,2016,46(12):3414–3426.
[39]LI H,CHEN Z,WU L,et al.Event-triggered fault detection of nonlinear networked systems.IEEE Trans.on Cybernetics,2017,47(4):1041–1052.
[40]LIU J,YUE D.Event-triggering in networked systems with probabilistic sensor and actuator faults.Information Sciences,2013,240:145–160.
[41]DUANK,ZHANG W D.Event-triggered fault tolerant control for networked systems with dynamic quantiser.IET Control and Theory Applications,2016,10(9):1088–1096.
[42]TARBOURIECH S,SEURET A,SILVA J,et al.Observerbased event-triggered control co-design for linear system.IET Control Theory&Applications,2016,10(18):3466–2473.
[43]CHEN X,HAO F.Observer-based event-triggered control for certain and uncertain linear system.IMA Journal of Mathmetical Control and Information,2013,30(4):527–542.
[44]ZHANG K,JIANG B,SHI P.Observer-based integrated ro-bust fault estimation and accommodation design for discretetime systems.International Journal of Control,2010,83(6):1167–1181
[45]WALSH G,YE H,BUSHNELL L.Stability analysis of networked control systems.IEEE Trans.on Control Systems Technology,2002,10(3):438–446.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Heterogeneous performance analysis of the new model of CFAR detectors for partially-correlated χ2-targets
- Quantum fireworks algorithm for optimal cooperation mechanism of energy harvesting cognitive radio
- Cognitive anti-jamming receiver under phase noise in high frequency bands
- Multi-channel signal parameters joint optimization for GNSS terminals
- Waveform design for radar and extended target in the environment of electronic warfare
- Cramer-Rao bounds for the joint delay-Doppler estimation of compressive sampling pulse-Doppler radar