Robust controller design for compound control missile with fixed bounded convergence time
2018-03-07YUNYuhangTANGShengjingGUOJieandSHANGWei
YUN Yuhang,TANG Shengjing,GUO Jie,and SHANG Wei
School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China
1.Introduction
Missile controller design represents the crucial component of a control system with the increasing demand for high accuracy and system reliability.Conventional bank to turn(BTT)tactical missiles,which possess significant advantages of high maneuverability and accelerating capability over skid to turn(STT)missiles[1],typically adopt aerodynamic control by fin deflections to adjust flight regimes like attitude,and trajectory.However,for those flying at exoatmosphere or near space,the efficiency of aerodynamic control decreases distinctly because of the low air density.The control effectiveness of aerodynamic fins is too weak to induce a fast response to the guidance command at such altitude.As a result,some alternative control approaches are required.One way to improve the control performance under such occasions is to steer the missile by the combination of both aerodynamic fins and the reaction jet control system(RCS).
Regardless of compound actuators,the inherent nonlinearity of the dynamics including severe cross couplings and interactions between various channels complicates the controller design process of BTT missiles.Some lineariza-tion methods based on small perturbation theory and fixed parameter hypothesis under specific conditions are introduced to decouple the nonlinear dynamic model of BTT missiles,so that conventional approaches can be applied conveniently.The BTT autopilot was designed with classical proportional-integral(PI)regulator,root locus and frequency domain methods respectively in[2,3].In[4],the parametric method for the gain-scheduled controller design of missile autopilot was presented.A new guardian-map based method that simplified the conventional process of gain scheduling was proposed,which was successfully applied on missile autopilot design[5].
However,strong couplings and uncertain aerodynamic characteristics,for example,parameter perturbations,which are regarded as disturbances,degenerate the control quality severely through the entire flight.If taking the compound control system into consideration,the nonlinear characteristic and coupling interferences become particularly apparent[6]since the control of aerodynamic fin deflections are continuous while the RCS adopts pulse thrusters working only under jet-on and jet-off modes.As a consequence,advanced control methodologies towards nonlinear couplings,disturbances and compound control allocation strategies should be investigated.
For missiles with the compound control system,new solutions were proposed in the past decades by using the more recent control methods.The missile attitude dynamic and kinematic model was divided into two fast and slow loops in[7]according to time scalar separation,which is the common idea that is widely adopted by almost all the control works related to the nonlinear missile controller design.The variable structure approach is then utilized in the loop design.A feedback linearization technique was applied to the nonlinear pitch-yaw model after analyzing the exact internal nonlinear dynamics of compound control missiles[8].In[9],the autopilot was augmented by using a time-delay adaptive scheme in order to adaptively compensate for feedback linearization error because of model uncertainty.In[10], five optimal control based autopilot design approaches were introduced and analyzed.In[11,12]a similar work utilizing both adaptive sliding mode control and fuzzy logic in the design of blended control system was finished.Furthermore,the control allocation strategies for compound control system were deliberated,such as direct allocation method[13],dynamic control allocation[14],and quantized allocation approach[15].In[16],a control allocation strategy based on fuzzy logic and model reference adaptive control was developed.Based on rudder effect,a chain combination variable proportional coefficient strategy was derived to conduct the control allocation in[17].In[18],the L2 optimal control allocation method was used and demonstrated to be effective in practical applications.
Among the myriad control methods for BTT missiles with the compound control system, the sliding mode control (SMC) technique is widely used and performs remarkable performance against uncertainties without exact modeling of the disturbances. This enables the system with good robustness and interference immunity. SMC methods involve a sliding manifolds that should be selected based on control objectives, and then appropriate reaching laws are designed to maintain the manifolds “on sliding mode”.The conventional SMC algorithm [19,20] prescribed the switching manifold as the linear combination of the system state and the desired command, which could only achieve the asymptotic or exponential convergence in state movement towards equilibrium point. As a result, in [21 – 24],nonlinear functions were introduced to determin the reaching law, with which control variables can reach the desired value within finite time. In [25], the finite time convergence sliding mode controller was improved through substitutions of system states and their derivatives, together with a varied exponential coefficient range, and thus avoiding the problem of singularity. Similarly, in [26], a nonsingular terminal SMC (TSMC) method was applied in the integrated guidance and control system, so that not only do system states converge to the command signals in finite time, but the missile can finally hit the target in finite time.
However,in the above mentioned works,where finite time convergence characteristic is incorporated,exhaustive estimations of settling time are not addressed.Only theoretical results are derived in the citation of Lemmas.From the expression of theoretical convergence rate,prior knowledge of initial system states must be known to estimate the bound of settling time.In the preliminary design of the control system,it would be much helpful if the bounded settling time can be predicted without any information of system initial conditions.Besides,different initial conditions correspond to various settling time,of which the maximum value depends on the largest initial error related to the Lyapunov function.Since the dynamics of BTT missiles with the compound control system becomes more complicated as a result of nonlinearities and uncertainties,the imperative demand of predicting system convergence rate is put forward.In contrast to existing finite time convergence controllers,the upper bound of the settling time could be estimated in the sense of the fixed time convergence concept[27],of which the upper bound of settling time is independent of system initial conditions.In[28],a network consensus problem to design and estimate the upper bounded convergence time of fline was solved.In[29],several fixed time TSMC methods were presented for a class of second-order nonlinear systems with newly constructed sliding manifolds.The uniform bounded convergence time is derived without any information of initial system states.In[30],a controller in the concept of fixed time stability was proposed for rigid spacecraft,where the attitude converges to the equilibrium before the predefined fixed time even with actuator saturation and fault.
In this study,the nonlinear attitude dynamic model is presented at the beginning for roll,pitch,and yaw control of BTT missiles with aerodynamic fins and the RCS in the presence of couplings and aerodynamic uncertainties.Decomposed into outer loop and inner loop architectures in the light of time scale separation,a sliding mode based control law incorporated with the idea of fixed time convergence is derived.Both of the control schemes,namely,virtual control input in the outer loop and the real blended control signal in the inner loop,are integrated with the derived control algorithm and simultaneously constitute a cascade control structure for the blended BTT controller.The deduced fixed time convergence SMC law motivates control variables to converge to the equilibrium point before the uniform bounded settling time,which is very different from the conventional TSMC algorithm.The upper bound of settling time here is simply a function of designed parameters,therefore prior knowledge of convergence rate can be evaluated in advance without any information of system initial conditions,which is very helpful for both preliminary controller design and practical application.Afterwards, control allocation is accomplished from the blended control signals based on the intrinsic characteristics of fin modules and RCS thrusters. To perform better robustness against aerodynamic uncertainties and alleviate the well-known chattering phenomenon, the extended state observer (ESO) is utilized for uncertainty estimation, as well as evaluating the first derivative of the virtual control input from the outer loop. Numerical simulations are carried out to demonstrate the superior performance of the designed blended controller. The advantage of blended control with the deduced control law is illustrated in comparison with that simply employing aerodynamic control by fin deflections. Also, compared to the conventional TSMC method, the designed blended controller exhibits nice convergence property within fixed time, of which the upper bound can be obtained independent of system initial states. With a uniform bounded convergence time, the controller can track the desired command in the presence of nonlinear couplings and aerodynamic uncertainties under different initial conditions.
The rest of this paper is organized as follows.In Section 2,nonlinear control dynamics is presented.Next,some preliminaries are introduced,and a sliding mode based control law with fixed time convergence is derived in Section 3,together with the control allocation strategy on the basis of compound actuator characteristics.In Section 4,detailed control property and system stability analysis are given.Finally,various simulations are performedin Section 5,which demonstrate the satisfactory performance of the designed controller.
2.Problem formulation
The nonlinear attitude dynamic model is formulated in the presence of gravity,couplings and aerodynamic uncertainties,which is suitable for a class of generic,non-axially-symmetric configuration BTT missiles with the compound control system.While conventional tail fins act as control surfaces,RCS modules are utilized as auxiliary control devices that help twisting and steering the missile particularly for high altitude and low aerodynamic efficiency situations.The RCS modules are installed on the head of missile body as visualized in Fig.1.xBODY-yBODY-zBODYdenotes the missile body coordinate system, of which xBODYcoincides with the missile’s longitudinal axis,yBODYlocates in the longitudinal plane and is perpendicular to xBODY,and zBODYis vertical to the xBODY-yBODYplane.Here in this work,the primary devices of RCS are pulse thrusters,which simply work under the on-off mode.
Typical missile control embodies the tracking of the commanded angle of attack,sideslip and roll signals.Before presenting the nonlinear dynamic model,some fundamental assumptions are introduced.
(i)The variations of static parameters like mass,moment of inertial through the entire flight are not taken into consideration.
(ii)Trustworthy measurements of attitude angles and angular velocities are available with high precision sensors.
(iii)Aerodynamic uncertainties and their derivatives are bounded.
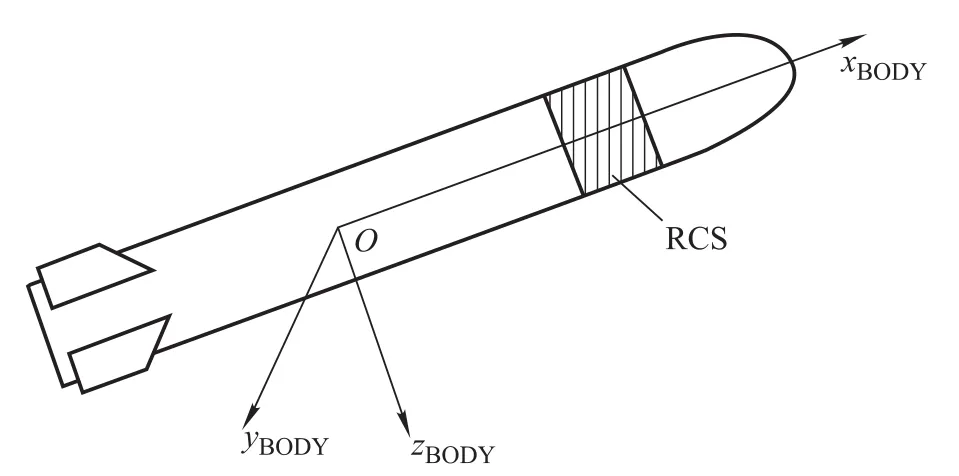
Fig.1 RCS module installed on the missile
Then,the complete dynamic model of the BTT missile with the compound control system is formulated as

where m,V,P,ϑ denote the missile mass, flight velocity,engine thrust,and pitch angle respectively.Jx,Jy,Jzare the moment of inertial,and α,β,γ stand for the attitude angles,namely,angles of attack,sideslip and roll.lx,ly,lzrepresent the characteristic length of RCS thrusts in terms of resultant control moment.wx,wy,wzare missile angular velocities.Ux,Uy,Uzrepresent RCS thrusts in the body coordinate system.Aerodynamic moments with respect to roll,yaw and pitch are depicted by Mx,My,Mzwith Y,Z being the lift and lateral forces through the entire flight.
Aerodynamic forces and moments have the following expressions:

where q denotes the dynamic pressure and can be calculated by q=0.5ρV2.dα1,dα2describe the aerodynamic uncertainty in terms of lift coefficient generated by angle of attack and elevator deflection.dβ1,dβ2describe the aerodynamic uncertainty of lateral force with respect to lateral force coefficient produced by angle of side slip and rudder deflection.dx,dy1,dy2,dz1,dz2dictate the aerodynamic uncertainty of moment coefficients in roll,yaw,and pitch directions resulting from attitude angles and fin deflections.As assumed at the beginning,all of the coefficients representing aerodynamic perturbations are bounded.
For our convenience,(1)can be rearranged to form the following nonlinear dynamic system:

The state variables are x1= [α,β,γ]T,x2=[wx,wy,wz]Tand u represents the compound control input.Aerodynamic uncertainties are integrated into d1,d2and can be treated as unknown disturbances.The vector fields and matrices of the system take the following form.


Equation(3)well represents the complex nonlinear behavior of BTT missiles steered by fin deflections and RCS.It involves high cross-couplings between different channels and compound control input to be allocated in the subsequentdesign.With measurable state variables x1andx2,items like f1(x1),f2(x2)and g1(x1)can be calculated.
3.Compound controller design
The nominal dynamic model developed in Section 2is suitable to design a nonlinear controller based on robust nonlinear stabilizing and tracking control law.In this section,prior knowledge of the ESO and fixed time stability of the nonlinear system are first introduced.Afterwards,a robust sliding mode based controller is designed with fixed time convergence characteristic.
3.1 Preliminary
With respect to(3),the ESO is used here to execute the online uncertainty estimation and compensate for system control input,which helps decreasing control burden effectively.The ESO has been investigated in many literatures[31,32].It views system model uncertainties or disturbances as the extended state to be estimated.
Consider a nominal system

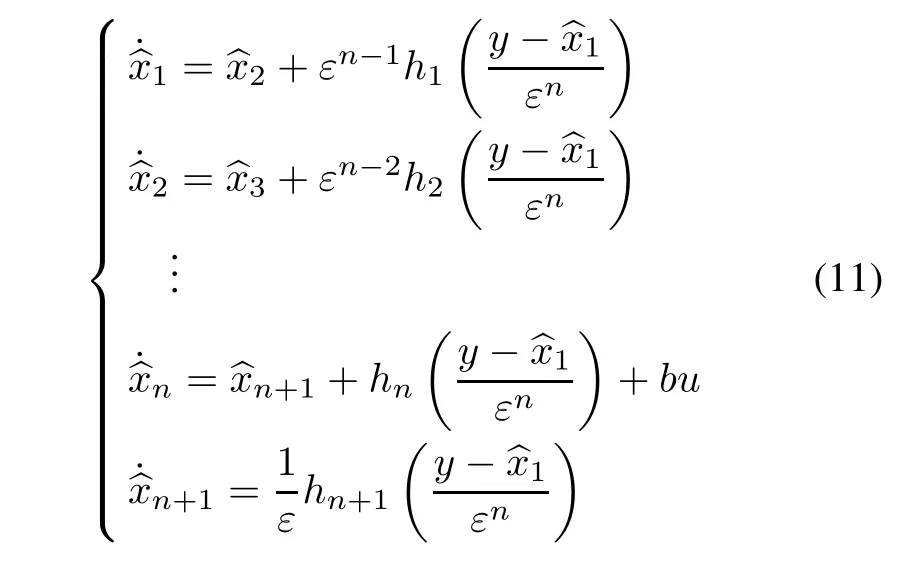
where u,y,f and d represent the control input,output,partial unknown quantities of the system,and system uncertainties,respectively.Under the hypothesis that system uncertainties,together with their derivatives are bounded,the ESO can be constructed with the expansion of the system state,that is,view the total uncertainties f+d as the extended state.The following gives a common form of the nonlinear ESO:
Another important synthesis in this paper is the concept of the fixed time stability,which can be assumed as the extension of finite time stability.
Consider the nonlinear system[21]

where f∶U0×R→Rnis continuous on U0×R,U0is an open set of the origin.
The origin is a finite time stable equilibrium if it is Lyapunov stable and for any given initial time t0and initial state x(t0)=x0∈U⊂U0,there exist a settling time T?0 which is dependent on x0,such that for every solution of system(14),x(t)= ϕ(t∶t0,x0)∈ U/{0},satisfies

Moreover,if the origin is finite time stable with U=Rn,then the origin is a global finite time stable equilibrium.Lemma 1 provides sufficient condition for the finite convergence control design.
Lemma 1[21]Consider the system of differential(13).Suppose there exists a continuous positive-definite function V(x,t):,whereis a neighborhood of the origin,such that there are real number c>0 and 0<a<1 satisfying˙V(x,t)+cVα(x,t)≤0 onThen,the zero solution of(13)is finite time stable.The settling time is given by

From Lemma 1,the finite convergence time depends on system initial condition.Different initial states result in varied settling time,which means no uniform bound of convergence time can be obtained in advance without the knowledge of maximum V(x0).If the prior information of system initial states is not available,pre-evaluations of controller performance may be restricted to some extent.For preliminary design,it would be much helpful if system performance metrics,for example,the bound of settling time,can be estimated in advance regardless of initial system conditions.Moreover,for those with strictly positive dwelling time, for example, hybrid system control,it is preferable to stabilize the controlled system exactly before the next switching occurs[30].Thus moving further on,the concept of fixed-time convergenceis addressed[27].
Considering(12),the origin is said to be a“ fixed-time stable”equilibrium point if it is globally finite-time stable and the settling time function T(x0)is bounded,that is,there exists Tmax> 0 such that T(x0)< Tmax,∀x0∈ Rn.Lemma 2 presents the helpful result for the design of the controller with fixed time convergence.
Lemma 2[28]Consider a scalar system

where α > 0,β > 0.m,n,p and q are positive odd integers satisfying m>n,p<q.Then the origin of(15)is fixed time stable and the settling time T is bounded by

Detailed proof of Lemma 2 can be found in[28].
As denoted in(16),the upper bound of settling time is independent of the initial condition,and basically determined by designed parameters,namely,m,n,p,q,α,β.Therefore,prior knowledge of“ fixed”settling time can be known in advance with the appropriate selection of parameters on the basis of system performance metrics.
3.2 BTT compound controller design
This part derives an RSM based controller with fixed time convergence for(3),where the cascade control structure is employed.Inspired by[33],the ESO is utilized not only for system uncertainty estimation,but evaluating the derivatives of the virtual control input from the outer loop.With ESO’s output incorporated into the control law as a feed forward compensation, the designed controller exhibits superior robustness.Additionally,control allocation is accomplished based on the intrinsic characteristics of continuous fin deflections and discrete RCS thrust.
3.2.1 Outer loop
Suppose the desired command is xd.The object of outer loop control is to design the angular rate defined as a virtual control input x1cto make x1converge to xdwithin a fixed bounded time.Rewrite the first equation of system(3)as

To get the virtual control input,d1needs to be estimated.Note from(6)that aerodynamic uncertainty in roll channel equals zero,therefore only uncertainty evaluations in yaw and pitch directions are necessary.Letthen on the baseline of(11),the ESO is constructed as


The convergence of the ESO(18)has been proved in[32]and thus is omitted here for simplicity.
For our convenience,in the following sections,terms ofare expended asrespectively.Meanwhile,we denoteas the estimated value of d1.It would be incorporated into the subsequent controller design,where an RSM based control law is derived.
define a sliding manifold as

Differentiating s1with respect to time yields

To achieve the fixed time convergence,the reaching law is designed in the form

where β1,β2,ε1and η are non-negative.m1,n1,p1and q1are positive odd constants satisfying m1>n1,p1<q1.Other vector fields take the following form:

Substitute(22)into(21),and the virtual control signal for the outer loop can be obtained as

In this work,to keep the uniformity of the design process,we treatas unknown disturbance and turn to the ESO for estimation.In the similar form with(11),denote ˙x1cas d1c=˙x1c,and then the ESO is constructed as follows:

Next,with the obtained virtual control input x1cfrom(26)and the outputof the ESO,the control law for the inner loop can be designed under the same baseline.
3.2.2 Inner loop
Similar procedures are conducted in inner loop design.The object is to deduce the actual compound control input such that the tracking error between the virtual control signal x1cand the actual angular rates variable x2converges to zero within a fixed bounded time. Rewrite the second equation of system(3)as

First,the ESO for the estimation of system uncertainty d2is constructed as follows:

Another sliding manifold is defined as

Taking the derivatives of s2gives

In the similar way,the reaching law for the inner loop is designed as

where β3,β4,ε2and η are non-negative.m2,n2,p2and q2are positive odd constants satisfying m2>n2,p2<q2.Except for the identical algorithm defined by(23)–(26),irrespective of diverse subscripts,another item is supplemented below for integrity.

where κ =diag[κ1,κ2,κ3],and κ1,κ2,κ3are positive.
Considering(31)and(32),the actual control input for stabilizing the tracking error in the inner loop is derived as

3.3 Control allocation
For BTT missiles with the compound control system,the compound actuators are aerodynamic fins and RCS.From(8),the compound control input embodies two categories,namely,continuous command δx, δy, δzof tail deflections and discrete command Ux,Uy,Uzgenerated by RCS.Combing(8)with(34)yields

Taking the intrinsic characteristics of different actuators into consideration,the aerodynamic fins can provide continuous control efforts while RCS modules demonstrate discrete control characteristics since thrusters simply work under the on-off mode.Therefore,the compound control signal is separated as

Equation(37)appropriately represents the behavior of RCS,which works under the on-off mode and acts in a discrete manner.Furthermore,as pulse thrusters are utilized in RCS,for the sake of reducing fuel consumption,the control signals for RCS is then improved as

where μi,i=1,2,3 are small positive constants.Varibles with superscript∗is interpreted in(39),sgn()is the signum function.
3.4 Structure diagram of control system
Fig.2 draws the design diagram of the compound controller.

Fig.2 Structure diagram of control system
4.Stability analyses
In this section,closed form stability analysis of system(3)is given with the deduced controller.Preliminaries introduced in Section 3 are helpful to the proof of the main results.
Theorem 1For the nonlinear dynamic system(3),system states can track the desired command with the designed compound controller within fixed bounded time and converge to a neighborhood around sliding manifolds.Further,the fixed bound of settling time is independent of the initial conditions.
ProofFor convenience,observation errors from the ESO are denoted as
As assumed in other works related to the ESO,the disturbance varies slowly relative to the observation dynamics,and can be reasonably estimated if the disturbance observer dynamics is faster than that of the closed-loop system.The same argument for the ESO based control methods is available[34].Detailed convergence analysis of the ESO used in this paper has already been demonstrated by theorem2.2in[32].The adopted ESO is of convergences within finite time.Via appropriate tuning of the designed parameters,the estimation error can be driven to a very small region of the origin promptly,which indicates that aerodynamic uncertainties and the first order derivative of virtual control input can be estimated rapidly with high accuracy.
Then,we get|e1|< σ1,|e2|< σ2,|ec|< σcwherein σ1→ 0,σ2→ 0 and σc→ 0.The sign|·|is equivalent to norm operator?·?.
For the outer loop,consider a Lyapunov function

Differentiating V1with respect to time and substituting(18),(22)and(27)into it yield

where s1i,e1iare the ith component of sliding manifold and observation error of the outer loop respectively.Note that the first two terms inside the bracket are positive since m1,n1,p1and q1are positive odd numbers.
Similarly, for the inner loop, a Lyapunov function is constructed as

Taking the derivative of V2with(29),(32)and(35),one gets

For the compound control system,the total Lyapunov function is defined as

Combined with(42)and(44),the derivative of V is depicted in the following form:


Deliberated tuning of ESO parameters would drive the observation error close to a small vicinity of the origin effectively,that is,epq→0,p=1,2,c,q=1,2,3.To ensure the stability of the compound system,designed parameters are chosen to satisfyi=1,2,3 andi=1,2,3.Without loss of generality,the bounds of observation errors can be less than that of the disturbances,so that smaller values for the switching gains ε1and ε2can be selected without sacrificing the disturbance rejection performance,as well as alleviating the chattering caused by high gain[35].Finally,we get

To simplify the design process,parameters can be chosen conveniently in the form m1=m2=m,n1=n2=n,p1=p2=p,q1=q2=q,β1= β3,β2= β4.
Then,(46)is synthesized as
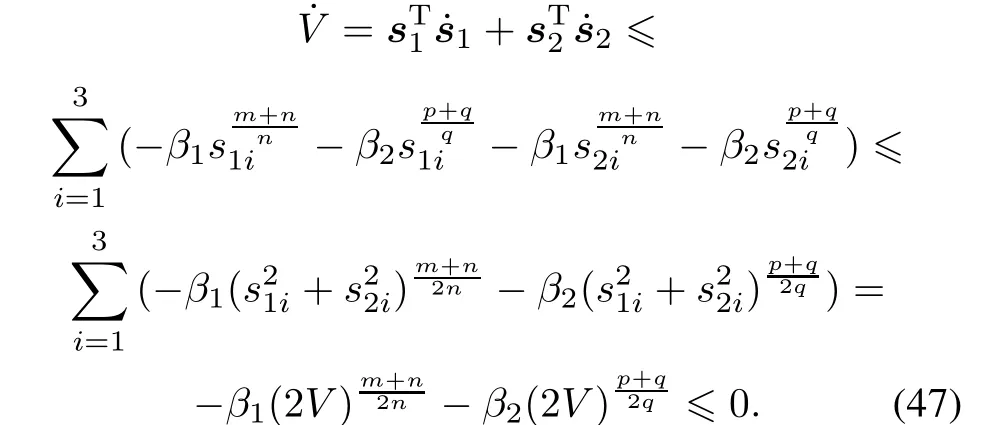

Considering Lemma 2,V=0 implies s1=s2=0.If V/=0,substitutinginto(47)yields which follows from Lemma 2 that system state reaches the sliding bounded region within fixed time t<Tmax.The fixed settling time is bounded and can be expressed as follows:

For the control variables α,β and γ,decreasing V ultimately drives the states of trajectory converge to the small region,wheredenotes the maximum observation error of the ESO in terms of|e1i|.Eventually,the tracking of the desired command is guaranteed.
Further,(49)indicates that the uniform fixed bound of settling time is a function of designed parameters.It is independent of system initial conditions and can be known in advance consequently. ?
5.Simulation results
In this section,a BTT missile with the compound control system in the presence of aerodynamic uncertainties is considered.The nonlinear control dynamics of(3)and the designed fixed time convergence sliding mode controller of(26),(36)and(38)are used in the simulation.To validate the effectiveness of the designed controller,simulations are divided into three subsections.Two kinds of maneuvers are pursued with the same varying aerodynamic uncertainties in the first two subsections,namely,tracking fixed constant command and tracking continuous turn command.Performances of missiles,which are actuated only by aerodynamic fins are simulated under the same conditions for comparison,thus reflecting the superiority of the compound actuators with the designed controller.Finally,in the last case,the three channel Monte Carlo simulations are carried out with different initial conditions,which fully reflects the fixed time convergence characteristic of the designed approach compared with the conventional terminal sliding mode controller.
The flight speed and altitude are Mach=5 and 25 km respectively.RCS thrusters are working under the on-off mode with the maximum thrust equal to 2500N.Tail deflections of aileron,rudder and elevator are limited to 15°.
5.1 Fixed constant command
This case simply takes the tracking ability of fixed constant command into consideration.Aerodynamic uncertainties behave in a severe situation as shown in Fig.3.

Fig.3 Time history of aerodynamic uncertainty coefficients
The desired command signals are αd=-0.175 rad,βd= 0 rad,and γd= -0.6 rad.Control parameters of(26),(36),and(38)are β1= β2= β3= β4,m1=m2=q1=q2=5,n1=n2=p1=p2=3,ε1= ε2=0.2,η=0.5 and κ =diag[125,20,20].The initial system states are α0=0 rad,β0=0.21 rad and γ0=0 rad.
Fig.4 illustrates the online estimation results of the ESO of the blended controller. It is obvious that values of disturbances in the outer loop are much smaller compared with those in the inner loop.Despite the fact that some deviations exist in the working process,the ESO adopted in this paper can rapidly alleviate the observation errors and track the real uncertainties with high accuracy.



Fig.4 Estimation results of ESO
The periodic behavior of aerodynamic uncertainty coefficients exerts disordered disturbances to the control system.Consequently,precise evaluation of disturbances is helpful to improve the robustness of the designed controller.Figs.4(f)–(h)demonstrate the estimation results of the derivative of virtual control input obtained from the outer loop,and distinct initial observation errors are augmented in the subgraphs.
Fig.5 exhibits the time histories of responses in pitch,yaw and roll channels with the designed blended controller.The missile controlled by single actuators(aerodynamic fins)is used for comparison.Fig.6 and Fig.7 plot the time histories of fin deflections and RCS thrust in different channels.As visualized in Fig.5,with the proposed controller of(26),(36)and(38),missiles actuated by aerodynamic fins and RCS can track the desired command with satisfactory performance in the presence of aerodynamic uncertainties.The settling time are approximately 1.2 s,1.1 s,1.2 s,all less than 1.33 s,which is the theoretical bounded fixed convergence time calculated from(49)with designed control parameters.At the beginning,deviations between command signals and initial state variables are considerably large,so tail fins are beyond the deflection constraint promptly for the sake of tracking,as shown in Fig.6.Since full aerodynamic fin deflections are unable to meet the demand of control quantities in such situations,for missiles with compound control system,RCS is activated immediately(as shown in Fig.7),which compensates the control system for available control efforts to some extent,as well as reducing the burden of the aerodynamic actuator.Compared to that actuated without RCS,fin saturations of the missile with compound control system have been alleviated effectively with time increasing,which propels the available control quantities rapidly to the scope of required control load.As a result,fast tracking within fixed convergence time is achieved for compound control missiles with the designed control law.The utilization of RCS accelerates the speed of response in terms of tracking command signals.

Fig.5 Control system response
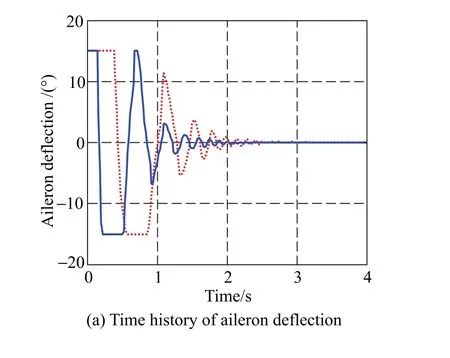

Fig.6 Time history of aerodynamic fins

Fig.7 Time history of RCS
5.2 Continuous turn command
In this case,it is assumed that aerodynamic uncertainty coefficients behave in an identical periodic manner with those in Section 5.1.Continuous signals are constructed as turn command for missiles to accomplish coordinate BTT maneuver,of which the commanded angle of sideslip equals zero from beginning till the end.An initial error of 0.175 rad has been given in the sideslip directions,while the initial angle of attack and roll are set to be 0 rad.
As with Section 5.1,online estimations of the ESO are plotted in Fig.8.




Fig.8 Estimation results of ESO
It can be seen that the ESO demonstrates satisfactory performance in terms of estimating aerodynamic uncertainties and the derivatives of virtual control signals.Distinct small deviations have been augmented in subgraphs.
Time histories of responses in separate channels with the designed blended controller are demonstrated in Fig.9–Fig.11,where the continuous turn commands are depicted as a reference. Similarly, details of distinctions between the compound control missile and the one with single aerodynamic actuators when tracking continuous turn command are supplemented in Fig.9(b)and Fig.11(b).Whatever the actuators of missile control system are,with or without RCS,continuous command signals for BTT could be tracked with the designed fixed time convergence sliding mode control law.However,those actuated by aerodynamic fins and RCS exhibit fast response with approximately less amplitude of accommodation. The settling time of the missile with compound control system is less than 1.33 s at the beginning and the transition phases where command switching occurs.

Fig.9 Response of pitch channel
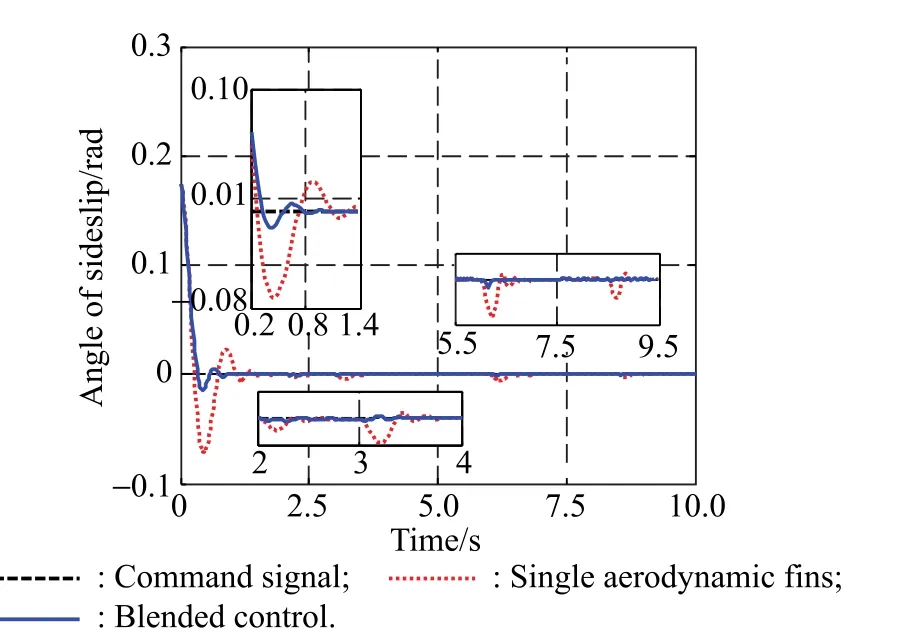
Fig.10 Response of yaw channel

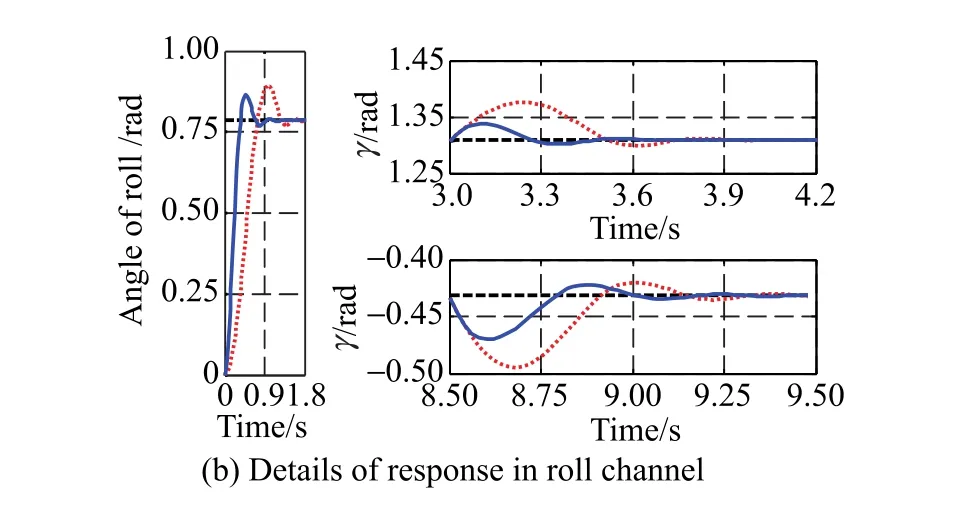
Fig.11 Response of roll channel
The superiority of the compound control missile with the designed controller could be explained by the following diagrams of fin deflections and RCS thrust,as shown in Fig.12–Fig.13.
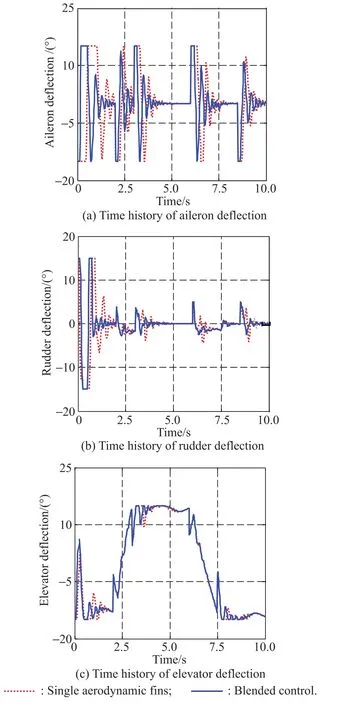
Fig.12 Time history of aerodynamic fins

Fig.13 Time history of RCS
Since the first two seconds of Section 5.2 are similar to the previous occasion of tracking constant command signals,only the performance throughout the transient moment,where command switches to another different phase,is addressed here.In the direction of pitch and roll,the compound control missile with the designed controller exhibits short setting time with roughly smaller overshoot.As demonstrated in Fig.12(a),Fig.12(c),Fig.13(a),and Fig.13(b),once the elevator or aileron deflection increases beyond the predefined physical constraint(normally at the moment when command signals switch to another phase),aerodynamic fins fail to provide sufficient control quantities required by control system.Then,the RCS system is tuned on to compensate for the lack of available control efforts,so that saturations of elevator and aileron can be alleviated and the control volume would be increased rapidly to the scope of required quantities.The utilization of RCS facilitates the fast tracking of the continuous command and improves the performance of missile control system.
Unlike pitch or roll channel,commanded angle of sideslip is set to be zero to realize the coordinated turning.It can be seen from Fig.12(b)that rudder deflection is saturated because of the large initial error at the beginning.As RCS is activated simultaneously,compound control missile possesses faster lateral response speed with short setting time,approximately 1s as shown in Fig.10.Additionally,despite the theoretical analysis that actual angle of sideslip ought to be stabilized at 0 rad or its vicinity when the initial error is eliminated,the time history of real sideslip angle exhibits distinct perturbations from the nominal value,particularly at the moment when command switching occurs in pitch and roll directions as amplified in Fig.10.This is because of the nonlinear couplings between different channels.Tracking behavior in the other directions exerts definite influences on the yaw channel,of which the deviations can be eliminated subsequently with the designed controller.
5.3 Verification of fixed time convergence
In this case,Monte-Carlo simulations are carried out to verify the fixed time convergence property of the designed controller.Fixed constant command,namely,αd=0.14 rad,βd=0 rad,and γd=0.524 rad,are being considered in the presence of aerodynamic uncertainties described in Section 5.1.Different initial values for each channel are α0=-0.087–0.175 rad, β0=-0.175–0.175 rad and γ0=-0.262–0.873rad.
Fig.14 depicts the tracking performance of the compound control missile with designed controller under various initial conditions.For comparison,in Fig.15,a TSMC is used here with identical designed parameters,of which the expressions are given as

Performance diagrams in Fig.14 demonstrate that the designed controller missile can track the command signals before the “ fixed”predefined bound of convergence time under different initial conditions.

Fig.14 Control system response with designed controller

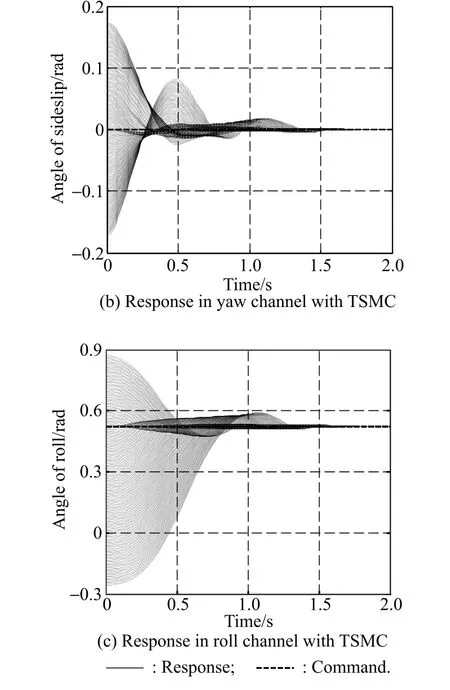
Fig.15 Control system response with TSMC
However,in the other diagram of Fig.15,where a TSMC is used,despite the fact that the missile with compound actuators is able to track the command in acceptable settling time,no uniform boundary of convergence time can be defined in advance since settling time of the TSMC algorithm is in connection with initial states.In addition,the tracking performance of the TSMC controller under the same conditions is not as good as the designed controller with fixed time convergence in terms of response speed and settling time.
Simulation results of Section 5.3 fully reflect the fixed time convergence characteristic of the designed controller,which is independent of initial conditions.That is also what separates the designed method with conventional TSMC controllers.
6.Conclusions
This paper designs a fixed time convergence sliding mode controller for the BTT missile with the compound control system in the presence of nonlinear couplings and aerodynamic uncertainties.With the ESO incorporated into the cascade control structure for uncertainty estimation and RCS activated to compensate for available control quantities,the proposed control law guarantees that control variables such as angle of attack,sideslip and roll converge to the desired command within fixed uniform bounded time regardless of initial conditions.Consequently,the bounded convergence rate can be predicted in advance without knowledge of system original states,which is of significant value in system preliminary design,as well as performance evaluation.Meanwhile,the rate of system response is increased as a result of the compound actuators with the proposed algorithm,therefore improving system capability when tracking desired command.Finally,extensive simulations are carried out to validate the effectiveness and robustness of the designed compound controller.
[1]DUAN C Y,ZHANG Y X,DONG C Y,et al.Adaptive sliding mode control for bank-to-turn missiles.Proc.of the International Conference on Electronic Measurement&Instruments,2009(3):512–517.
[2]LIN C F,YUEH W R.Coordinated bank-to-turn autopilot design.Proc.of the American Control Conference,1985:922–926.
[3]KOVACH M J,STEVENS T R,ARROW A A.A bank-to-turn autopilot design for an advanced air-to-air interceptor.Proc.of the AIAA Guidance,Navigation and Control Conference,1987:1346–1353.
[4]TAN F,DUAN G R.Global stabilizing controller design for linear time-varying systems and its application on BTT missiles.Journal of Systems Engineering and Electronics,2008,19(6):117–1184.
[5]SAUSSIé D,SAYDY L,AKHRIF O.Gain scheduling control design for a pitch-axis missile autopilot.Proc.of the AIAA Guidance,Navigation and Control Conference and Exhibit,2008:7000.
[6]YIN Y X.Research on guidance&control method of interceptor missile with aerodynamics and lateral thrust blended.Harbin,China:Harbin Institute of Technology,2008.
[7]WANG P,CHEN W C,YIN X L.Large angle attitude reaction jet control for an air-to-air missile.Acta Aeronautica et Astronautica Sinica,2005,26(3):263–267.
[8]ZHOU D,SHAO C.Dynamics and autopilot design for endoatmospheric interceptors with dual control systems.Aerospace Science&Technology,2009,13(6):29–300.
[9]LEE C H,LEE Y W,JUN B E,et al.Design of missile autopilot using PI and approximate feedback linearization control with time-delay adaptation scheme.Proc.of the IEEE Control Conference,2014:2762–2767.
[10]WISE KA.A trade study on missile autopilot design using optimal control theory.Proc.of the AIAA Guidance,Navigation and Control Conference and Exhibit,2007:6673.
[11]YANG P F,FANG Y W,CHAI D,et al.Fuzzy control strategy for hypersonic missile autopilot with blended aero- fin and lateral thrust.Proc.of the Institution of Mechanical Engineers Part I Journal of Systems&Control Engineering,2015,128(21):415–427.
[12]CHAI D,FANG Y W,WU Y L,et al.Aerodynamic force and lateral thrust blended control for hypersonic missile using fuzzy control algorithm.Proc.of the Control Conference,2015:3567–3572.
[13]DURHAM W C.Constrained control allocation—three moment problem.Journal of Guidance Control&Dynamics,1994,17(2):330–336.
[14]KISHORE W C A,SEN S,RAY G,et al.Dynamic control allocation for tracking time-varying control demand.Journal of Guidance Control&Dynamics,2015,31(4):1150–1157.
[15]HUANG H.Control allocation of reaction control jets:quantization and stability.Journal of Guidance Control&Dynamics,2015,38(1):115–119.
[16]ZHOU R,WANG J.Adaptive control allocation between aerodynamic fin and side thruster and controller design using multi-objective optimization.Acta Aeronautica et Astronautica Sinica,2007,28(1):187–190.
[17]GAO F,TANG S J,SHI J,et al.Compound control allocation strategy of dual aero/jet vane control missile.Transaction of Beijing Institute of Technology,2012,21(4):434–441.
[18]XU B,ZHOU D.Backstepping and control allocation for dual aero/propulsive missile control.Systems Engineering&Electronics,2014,36(3):527–531.(in Chinese)
[19]SHTESSEL Y B,SHKOLNIKOV I A,LEVANT A.Guidance and control of missile interceptor using second-order sliding modes.IEEE Trans.on Aerospace&Electronic Systems,2009,45(1):110–124.
[20]LIU L,ZHU J,TANG G,et al.Diving guidance via feedback linearization and sliding mode control.Aerospace Science&Technology,2015,41:16–23.
[21]ZHOU D,SUN S,TEO K L,et al.Guidance laws with finite time convergence.Journal of Guidance Control&Dynamics,2009,32(6):1838.
[22]YU XH,MANZ H.Fast terminal sliding-mode control design for nonlinear dynamical systems.IEEE Trans.on Circuits&Systems I Fundamental Theory&Applications,2002,49(2):261–264.
[23]WANG Z,LI S H,FEI S M.Finite-time tracking control of bank-to-turn missiles using terminal sliding mode.Icic Express Letters,2009,3(4):1373–1380.
[24]HUI L,LI J.Terminal sliding mode control for spacecraft formation flying.IEEE Trans.on Aerospace&Electronic Systems,2009,45(3):835–846.
[25]KUMAR S R,RAO S,GHOSE D.Nonsingular terminal sliding mode guidance and control with terminal angle constraints for non-maneuvering targets.Proc.of the 12th IEEE International Workshop on Variable Structure Systems,2012:291–296.
[26]WANG X,WANG J.Partial integrated missile guidance and control with finite time convergence.Journal of Guidance Control&Dynamics,2013,36(5):1399–1409.
[27]POLYAKOV A.Nonlinear feedback design for fixed-time stabilization of linear control systems.IEEE Trans.on Automatic Control,2012,57(8):2106–2110.
[28]ZUO Z Y,LIN T.Distributed robust finite-time nonlinear consensus protocols for multi-agent systems.International Journal of Systems Science,2016,47(6):1366–1375.
[29]ZUO Z Y.Non-singular fixed-time terminal sliding mode control of non-linear systems.IET Control Theory&Applications,2014,9(4):545–552.
[30]JIANG B,HU Q,FRISWELL M I.Fixed-time attitude control for rigid spacecraft with actuator saturation and faults.IEEE Trans.on Control Systems Technology,2016,24(5):1892–1898.
[31]LI S,YANG J,CHEN W H,et al.Generalized extended state observer based control for systems with mismatched uncertainties.IEEE Trans.on Industrial Electronics,2012,59(12):4792–4802.
[32]GUO B Z,ZHAO Z L.On the convergence of an extended state observer for nonlinear systems with uncertainty.Systems&Control Letters,2011,60(6):420–430.
[33]MA Y Y,TANG S J,GUO J.High angle of attack command generation technique and tracking control for agile missiles.Aerospace Science&Technology,2015,45:324–334.
[34]YANG J,CHEN W H,LI S.Autopilot design of bank-to-turn missiles using state-space disturbance observers.Proc.of the Ukacc International Conference on Control,2012,226(1):1–6.
[35]WANG F,ZONG Q,DONG Q,et al.Disturbance observer-based sliding mode backstepping control for a re-entry vehicle with input constraint and external disturbance.Transactions of the Institute of Measurement&Control,2016,38(2):165–181.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Heterogeneous performance analysis of the new model of CFAR detectors for partially-correlated χ2-targets
- Quantum fireworks algorithm for optimal cooperation mechanism of energy harvesting cognitive radio
- Cognitive anti-jamming receiver under phase noise in high frequency bands
- Multi-channel signal parameters joint optimization for GNSS terminals
- Waveform design for radar and extended target in the environment of electronic warfare
- Cramer-Rao bounds for the joint delay-Doppler estimation of compressive sampling pulse-Doppler radar