Analysis of detection capabilities of LEO reconnaissance satellite constellation based on coverage performance
2018-03-07MENGShaofeiSHUJianshengYANGQiandXIAWei
MENG Shaofei,SHU Jiansheng,YANG Qi,and XIA Wei
Graduate School,Rocket Force University of Engineering,Xi’an 710025,China
1.Introduction
Low earth orbit (LEO) reconnaissance satellite constellation is always composed of reconnaissance satellites in low earth orbits, such as optical imaging reconnaissance satellite,radar imaging reconnaissance satellite and electronic reconnaissance satellite. Since coverage circles of these satellites are not big enough, it is advisable to use them for zonal discontinuous coverage. Essentially, the objects of military reconnaissance are always indeterminate time sensitive targets in a certain area, and the users always only concern with the reconnaissance capabilities for these targets [1,2]. However, for the designers, it is more expedient to estimate the coverage performance for the certain area than the reconnaissance capabilities for the indeterminate targets. Therefore, it is of great importance to evaluate the reconnaissance capabilities with the coverage performance for the constellation designers.
In addition,traditional constellation design goals focused on the whole earth continuous coverage for global navigation and communication.For constellation design of zonal coverage,the most used nonanalytic methods are genetic algorithm(GA)[3–5],particle swarm optimization(PSO)[6]and non-dominated sorting GA-II(NSGAII)[7,8]algorithms,etc,where the objective function is determined by the constellation design goal and the dominant performance indicator.However,different indicators are always coupled even contradictory and could not reach their optimal values at the same time.Therefore,the relationship between reconnaissance capability and coverage performance should be established,and the dominant indicator should be selected for reconnaissance constellation design and optimization.
Essentially,satellite reconnaissance is the process of coverage of a certain target and the acquisition of intelligence.Viewed from military intelligence discipline,accuracy and timeliness are essential features of military intelligence[9–11],important determinant of the information value,and important content of reconnaissance constellation capability evaluation.Based on this consideration,the reconnaissance process of LEO reconnaissance satellite constellation is analyzed and the relationship between reconnaissance capabilities,including detection probability(DP)and expectation of detection time delay(EDTD),and the coverage performance are established.
2.Detection capability for time-indeterminate point target


Fig.1 Sketch map of coverage time distribution
Assume that the time for transmission from constellation to the ground station and the time for confirmation are all small values and could be neglected.If the event happens during the coverage section,the detection time delay Δt=0.Therefore,the EDTD can be written as


If the time prior information of the event is unknown,based on the maximum entropy principle[12],it is advisable to suppose that the happening time of object event conforms to uniform distribution.Then the probability density function of t is

Substitute(3)into(2)and calculate indefinite integralas

where GTis the time average gap indicator,which is defined as the coverage gap time averaged by simulation time and equal to the quadratic sum of coverage gaps divided by simulation time.
Suppose that



Thus in the ideal situation,when the coverage gaps have the same lengths,E gets its minimum

where GMis the mean coverage gap index,which is defined as coverage gaps summation divided by coverage gap amount;CTis the time percent coverage index,which equals to summation of coverage time divided by simulation time[13].


From(4),the GMindex mainly influences the value of EDTD.The value of EDTD could be reduced by following means:(i)increase the coverage times n;(ii)increase the altitude of satellites h to decrease the coverage intervalsIf T=24 h,the changing law of Eminwith satellites h and n are shown in Fig.2 and Fig.3.In Fig.2,when the altitude increases from 200 km to 600 km,Emindecreases from2.985 h to 2.949h.In Fig.3,when coveragetimes increase from 4 to 6,Emindecreases from 2.985 h to 1.985 h.By the comparison of the results,coverage times n has greater effect on Eminthan altitude h,which provides direction for constellation optimization and evaluation.

Fig.2 Eminchanging with altitude

Fig.3 Eminchanging with coverage times
Under the condition of keeping the basic constellation configuration,the optimization for increasing coverage times is better than that for increasing satellites altitude.At the same time,considering the optimization cost,increase of coverage times is easy to be achieved by orbits and satellites distribution adjustment,while the increase of the altitude will not only decrease imaging resolution but also will increase the energy for satellites launch.
3.Detected capability for target with indeterminate time and location
Suppose that the area with the longitude range of(λa,λb)and latitude range of(ϕa,ϕb)has the size of S.The reconnaissance time range is(0,T).The target appears at indeterminate location in the area at indeterminate time.If the target appears at time t with probability of f1(t),and at location(λ,ϕ)with probability of f2(λ,ϕ),then we have
When the prior information of probability is unknown,it is advisable to regard the target probability distribution as uniform distribution with the probability density function as follows:

In addition,form(1),the EDTD for arbitrary point(λ,ϕ)is

Thus the EDTD for the whole area is

Consider the case of partial coverage(i.e.the constellation is unable to cover the whole area),the coverage gap of uncovered points is meaningless.Thus(13)can be divided into two parts using sign “~”as the notation for the covered part and “¯”for the uncovered part.Then the size of the target area could be expressed asand(13)also could be expressed as

where

Substituting(4)and(11)into the second equation of(15),there is

Substituting(16)and(17)into(14),there is

where

In(18),similar with the GTindex,GTAis the time and area average gap index,which can be defined as the coverage gap averaged by both the size of the area and the total time of simulation,and can be pressed as dividing the quadratic sum of coverage gaps by whole area and total time.Similar with the CTindex,CAis the area percent coverage of the area index,which is defined as the ratio of covered-area to the whole area.Then the value of DP is equal to

4.Detection capability for stochastic mobile point target
Consider the coverage of stochastically mobile point targetsin a certain area, the renaissance for warships by ocean surveillance satellite constellation for example. As its route is unknown and its speed is far slower than that of satellites,it is reasonable to regard the target stable during one pass of a satellite and stochastic moved between two passes of satellites[14–17].Assume that the target will be detected if once covered.The mean covered area per pass of satellite(Apfor short)can[18]be expressed as

where ωsis the mean angle speed of satellite,β is radius of coverage circle,and tpis the mean coverage time of the area for one pass of satellite,which can be defined as the total time for coverage of the area dividing the amount of coverage gaps.It should be noted that this concept,as well as Apabove,is defined in view from the whole area rather than a point or a satellite.Then detection probability for every pass of satellite[19,20]is

If the area is coveredfor n times,the value of DP would be

There are two ways to enlarge the value of DP.One is to increase the satellites altitude,so that Apwill increase,but the orbit period or coverage gaps will be longer.The other way is to adjust the orbits and satellites distribution to increase coverage times n.Fig.4 shows DP changing with satellite altitude and coverage times under condition of S=4×106km2,α =45°(the maximal cone angle).When the altitude is relatively low,DP changes rapidly.While the altitude increases,it changes slightly.In addition,DP increases observably with the coverage times increasing.At the altitude of 500 km,one more time of coverage is haply equivalent to an increase of altitude by 100 km.

Fig.4 DP changing with altitude and coverage times
In what follows the EDTD is considered with the following assumptions:the target comes into the area when t=0,response time of constellation isthe area is covered for n times during time of T,and the coverage gaps of the area are.Then during the i th coverage,the target is detected with a probability of

The corresponding detection time delay is

It obeys the geometric distribution and the expectation is

Because of the nonuniformity of the coverage gaps,the expectation equation of geometric distribution cannot be used here.Assume that in one regression period Tr,N times coverage of the area can be combined together and presented as a whole discontinuous coverage process,with the detection probability of

The expectation of detection time delay with incomplete probability information in one regression period is

Substituting(24)and(25)into(28),there is

The equation above can be also written as

where

For the complete probability expectation,the contribution from coverage in the second regression period equalsand the contribution from coverage in the mth regression period isThen there is

The limitation in the equation above is the geometrical progression and absolutely convergent,and its solution is

Substituting(30)and(34)into(33),the complete probability expectation is

where


5.Numerical simulation
To validate the conclusions above,comparisons of evaluations of the reconnaissance capability are given with two different methods.One method is the direct simulation with Monte Carlo experiments,the other one is indirect calculation from the coverage performance index. The constellation used in the following simulation is typical regressive Walker-δ constellation with specified configuration:N/P/F=20/5/1,the regression period is one day,regression circles are 14,inclination is 80°,and the minimum elevation angle is 5°.
5.1 Simulation for time-indeterminate point target
Suppose the target point has geometric location of λ=ϕ =45°.The detection probability of constellation can be directly evaluated by Monte Carlo simulation experiments with disadvantage of complexity and too large computation.The result is shown in Fig.5.Then coverage performance of the constellation could be evaluated by statistics.The GTindicator is shown in Fig.6.With the conclusion in Section 2,the EDTD could be indirectly calculated by the GTindex,as shown in Table 1.
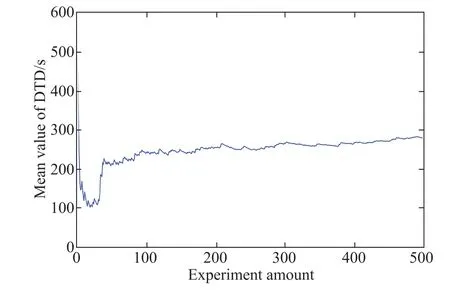
Fig.5 EDTD index for time-indeterminate point targets from Monte Carlo experiments

Fig.6 GTindex for the target point

Table 1 Comparison of EDTD indexes for time-indeterminate point targets
5.2 Simulation for point target with stochastic time and location
It is assumed that the longitude range of the target area is(30°,80°),and the latitude range is(30°,60°).Then the GTAindicator can be evaluated by statistics,as shown in Fig.7,and the percent coverage of area is 100%,that means the detection probability is 100%.

Fig.7 Simulation result of GTAindex
To use the Monte Carlo method,the problem how to give the objects stochastic locations with area-uniform probability needs to be solved firstly.In what follows the target area is divided into many little longitude belts and projected into(0,1)section by ratio of its area to the total area.Selection values in the(0,1)section with the uniform probability can approximately take place of selection belts where the points have area-uniform probability.Then the latitudes of points can be placed by the latitudes of the belts.At last,the longitudes can be selected with the uniform probability(see Fig.8).The result of Monte Carlo simulation experiments is shown in Fig.9 and its comparison with that from indirect calculation is shown in Table 2.

Fig.8 Distribution of target points

Fig.9 EDTD index for targets with indeterminate time and location by Monte Carlo experiments

Table 2 Comparison of EDTD index for targets with indeterminate time and location
5.3 Detection capability for stochastic mobile point target
It is assumed that the boundaries of the area are the same as above.To evaluate the detection capability of the constellation,the tpindex and the coverage gap amount of one regression period N are needed.The two indicators are evaluated by simulation,as shown in Fig.10 and Fig.11.Then the mean detection probability of one pass p can be calculated to be 95.9%,and the EDTD can be calculated as Table 3 shows.The evaluation result of detection time delay with Monte Carlo experiments is shown in Fig.12.

Fig.10 Simulation result of tpindex

Fig.11 Coverage gap amount per regression period

Fig.12 Results of Monte Carlo simulation experiments

Table 3 Results of EDTD indexes of mobile targets from different methods
In above examples,the results by calculation from the indexes are very close to the results from direct simulations.It suggests that the analytic models built for analysis of the detection processes are mainly correct and useable in analysis of the detection capabilities.That also means the indexes are valuable in the evaluation of detection capabilities of the reconnaissance constellations.
6.Conclusions
Since the method of coverage performance optimization is currently mainly used in LEO reconnaissance satellite constellation design,then how to evaluation the detection capability of the constellation with its coverage performance index is of great importance in the constellation design,optimization and evaluation.Viewed from the military intelligence discipline,the detection capability can be specified to DP and EDTD.For different kinds of general stochastic targets,the mathematic models of reconnaissance process are built and the relationships between detection capability and coverage performance are established.The conclusion suggests that both DP and EDTD can be evaluated by the coverage performance index.
[1]LI D,YU X H.Application of multi-sensor information fusion in space reconnaissance.Ordnance Industry Automation,2012,31(3):86–88.
[2]ZHANGY,LIANGYG,CHENL,et al.The threat assessment method of optics imaging reconnaissance satellite.Journal of National University of Defense Technology,2012,34(5):32–35.
[3]WANG X Y,LI J,WANG T B,et al.Satellite constellation design with genetic algorithms based on system performance.Journal of Systems Engineering and Electronics,2016,27(2):379–385.
[4]DAI G M,ZHENG W,XIE B Q.An orthogonal and model based on multiobjective genetic algorithm for LEO regional satellite constellation optimization.Proc.of the 2nd Conference on International Symposium on Intelligence Computation and Applications,2007:652–660.
[5]ZENG Y J.Satellite constellation design based on genetic algorithm.Wuhan,China:Huazhong University of Science and Technology,2007.
[6]CHENG S W,ZHANG H,SHEN L C,et al.Optimization of regional coverage reconnaissance satellite constellation by GDE3 algorithm.Journal of System Simulation,2009,21(2):586–589.
[7]WANGMC,DAIGM,HUHP.Improved NSGA-II algorithm for optimization of constrained functions.Proc.of 2010 International Conference on Machine Vision and Human-Machine Interface,2010:673–675.
[8]SHEN X.Research on key technologies of orbit design for optical remote sensing satellite.Wuhan,China:Wuhan University,2012.
[9]LI Z M,LIU G,TAN Q.A method for space reconnaissance task relevant degree analysis and redundancy deletion.Journal of National University of Defense Technology,2014,36(5):180–184.
[10]FU X F,WU M P,TANG Y.Analysis of response time and orbit design for responsive reconnaissance.Systems Engineering and Electronics,2012,34(3):555–561.(in Chinese)
[11]HU X,LIN J F,LIU L L.Distribution predication and efficiency analysis of naval vessel targets by satellite reconnaissance.Computer Measurement&Control,2012,20(6):1580–1586.
[12]MARTYUSHEV L M,SELEZNEV V D.Maximum entropy production principle in physics,chemistry and biology.Physics Reports,2006,426(1):1–45.
[13]ZHANG Y L,FAN L,ZHANG Y,et al.Theory and design of satellite constellations.Beijing:Beijing Science Press,2008.
[14]LIU Y,YAO L B,XIU J J,et al.Ship target tracking with satellite electronic information based on improved MHT.Systems Engineering and Electronics,2017,39(6):23–27.(in Chinese)
[15]CHEN J,XING L J.Imaging reconnaissance method facing ocean motion target.Computer&Digital Engineering,2014,42(3):395–398.
[16]WANG Y J,YUE L J,CAI S.Analysis of detection capability evaluation system for satellite observing on sea target.Telecommunication Engineering,2010,50(5):13–16.
[17]SUJW,SONGY,XULZ.Electronic reconnaissance satellites to surface ship.Shipboard Electronic Countermeasure,2009,32(4):51–53.
[18]ZHU J F,YOU M Y.Reconnaissance effectiveness analyses of ocean surveillance satellite based on fusing multidimensional information.Journal of System Simulation,2014,26(11):2682–2691.
[19]ZHANG Y S,ZHANG Y L.Analysis of the probability of target detection and max access gap of reconnaissance constellation.Systems Engineering and Electronics,2005,27(9):1587–1635.(in Chinese)
[20]LEI G Q,CHEN H Y.Threat level analysis about the reconnaissance of electronic reconnaissance satellite to warship.Shipboard Electronic Countermeasure,2014,37(6):41–48.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Heterogeneous performance analysis of the new model of CFAR detectors for partially-correlated χ2-targets
- Quantum fireworks algorithm for optimal cooperation mechanism of energy harvesting cognitive radio
- Cognitive anti-jamming receiver under phase noise in high frequency bands
- Multi-channel signal parameters joint optimization for GNSS terminals
- Waveform design for radar and extended target in the environment of electronic warfare
- Cramer-Rao bounds for the joint delay-Doppler estimation of compressive sampling pulse-Doppler radar