Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization
2018-03-07HUANGChangqiangDONGKangshengHUANGHanqiaoTANGShangqinandZHANGZhuoran
HUANG Changqiang,DONG Kangsheng,HUANG Hanqiao,TANG Shangqin,and ZHANG Zhuoran
Aeronautics Engineering College,Air Force Engineering University,Xi’an 710038,China
1.Introduction
Although the state of the art of unmanned combat aerial vehicle(UCAV)research has mostly focused on ground strike scenarios[1–4],UCAV will certainly come to play a central role in fighting for air supremacy in the near future.The autonomous capability is the key point,and it is advancing from the state of automatic systems requiring human control, towards a state of autonomous systems able to make decisions and reactions without human participation[5].Autonomous air combat is the final form for UCAV to join in the air combat game,whereas the study of air combat maneuver decision has been limited to a small scale since the pilot of manned aircraft completes such decisions;however,for the upcoming unmanned autonomous air combat era,this is indispensably essential.
Elementary maneuver was proposed by Austin[6],seven elementary maneuvers for the red aircraft and seven for the blue aircraft,and there were 49 possible end states that made up the scoring matrix[7–9].The elementary maneuvers method was also used by Sun[10]to build an air combat decision support system.However,the drawback of the elementary maneuver method is that the overload always suddenly changes and would exceed the dynamic boundary.A single-stage influence diagram was introduced to air combat decision by Virtanen[11],while the multistage influence diagram was constructed to acquire better overall goals[12].However,the decision was made off-line because the multistage influence diagram was converted into a complicated nonlinear programming problem[13].Approximate dynamic programming was used to build a high performance decision model for air combat in 1 versus 1 scenario[14–16];however,those studies were restricted in the horizontal plane and thus cannot satisfy the requirements of autonomous air combat for UCAV.Missile evasion or the air combat pursuit-evasion game was formulated as a differential game[17–20],but the solution of the differential game was complex and required enormous amount of calculation,making it hard to be applied in practice[21].
Situation assessment is a vital part of air combat[22–25]and should be the basis to make a decision;however,it has not been used as the precondition to make a maneuver decision in the previous studies.Receding horizon control is an effective method to solve on-line opti-mization problem,which has been widely used[26–29].Based on the above analysis,we propose a maneuver decision method for UCAV autonomous air combat,which can be shown in Fig.1.
Firstly,the moving horizon optimization method is used to model the whole air combat maneuver decision process.Secondly,Bayesian inference theory is used to assess the combat situation,and the weights of the maneuver decision factor are adaptively adjusted according to the outcome of combat situation assessment;as fuzzy logic has been largely used in modeling due to its good robustness and computation efficiency[30–33],it is applied to build the maneuver decision factor function. The maneuver decision factors combining with the adaptively weights consist of the objective function of maneuver decision.Finally,a position prediction model of opponent aircraft is built by using the sequential maneuver and inertia method,which is to be used as an assistance to make the maneuver decision.
2.Position prediction of opponent aircraft
To make an effective maneuver decision,the precise prediction of opponent aircraft movement is necessary.The maneuver decision is made real-time,thus the prediction model of opponent must not be complex.The basic maneuver element of opponent uses the model proposed by Austin[6],in which a model of seven elementary maneuvers is proposed.To simplify the prediction process,we use five elementary maneuvers as the maneuver base of opponent prediction.The five elementary maneuvers consists of maximum acceleration,maximum G-force left turn,maximum G-force right turn,maximum G-force diving,and maximum G-force climbing.The elementary maneuvers are shown in Fig.2.
The position prediction of opponent aircraft consists of indeterminate maneuver,sequential maneuver and inertia property.Indeterminate maneuver can be described by maneuvers2,3,4,5,which means opponent aircraft randomlychooses maneuver from the elementary maneuver; sequential maneuver means continuous right turn,left turn,diving or pull-up,which can make up the typical maneuvers such as splits, barrel roll, bank turn,etc[34–38].The sequential maneuver is more frequently used than the random maneuver.Inertia is the inherent property of a body,which means the body has the tendency to keep the current state until it is changed by external force.The tendency grows with the weight of the body.Therefore,in this paper,we can state that the opponent aircraft has strong tendency to keep the current state till it is changed by tactical requirement.Thus,we give a big weight to current state of opponent aircraft as the inertia property to predict its position.

Fig.2 Five elementary maneuvers
Based on the above analysis,the position of opponent aircraft is predicted by

where,p1,p2,p3,p4and p5are the predicted positions using the corresponding five basic maneuver elements;ω1,ω2,ω3,ω4,ω5are the corresponding weights.Furthermore,p1represents the inertia property,so its weight ω1is bigger than other weights.psequrepresents the sequential maneuver property,which is related to previous state of opponent aircraft,thus the weight ωsequis bigger than ω2,ω3,ω4or ω5.
3.UCAV maneuver decision model
3.1 UCAV dynamical model
A 3-degree-of-freedom point mass model is used to build the UCAV dynamical model,which can be described by

where the state variables x and y are horizontal coordinates,while h is the altitude of UCAV,γ is the flight path angle,χ is the heading angle,and v is the velocity.Furthermore,the control variables are the bank angle μ,tangential overload nxand normal overload nz.g is the acceleration of gravity.Thus,the state vector is x=[x,y,h,v,γ,χ]T,and the control vector is u=(nx,nz,μ)T.
To ensure that the dynamic model is feasible to the UCAV platform performance limits, some constraints must be added to the state variables and control variables via the following inequalities:

where the subscript“max”and “min”represent the lower and upper bounds of corresponding variables.
3.2 Moving horizon control scheme for maneuver decision
This paper introduces the moving horizon control scheme for the solving of the air combat maneuver decision problem.In the moving horizon control scheme, the whole control process is divided into a series of discrete short optimizing intervals.The controls are optimized over each interval,and the state is then updated by applying the optimal control to the current state of UCAV.Fig.3 shows the graphical illustration of moving horizon optimization for UCAV maneuver decision.

Fig.3 Illustration of moving horizon optimization
In Fig.3,Tp,krepresents the time it takes to complete a maneuver decision making at the stage of k,ΔTp,kis the interval between two maneuver decision makings at the stage of k;Tp,k,consisting of Te,kand Tm,k,denotes the length of planned controls at the stage of k;Te,kdenotes the length of controls planned to be executed,Tm,kis the margin of the planned controls that may be partially similar to next stage Te,k+1,which will only works when the next stage Tp,k+1is not generated for various uncertain reasons;ΔT is the time interval between two sequential decision stages.
They should satisfy the following constraints:

In this scheme,the optimization of controls is made at discrete instant tk= ΔT·k,when the current states are xk=[xk,yk,hk,vk,γk,χk]Tand the current controls are uk=(nx,k,nz,k,μk)T.And then we need to determine the variables Δuk=(Δnx,k,Δnz,k,Δμk)to maximize the performance index Jk=f(xk,uk,Δuk,...)Δt.
The try input method[36]is used to search for the opti-mal vectorwhere,the next stage execution controls are determined by

which brings the optimum performance for

3.3 Building maneuver decision factor functions using fuzzy logic
Angle,height,velocity and distance jointly constitute the main factors of air combat;therefore,the maneuver decision is made based on the combination of these four factors.Air combat is a complicated dynamic process with a mass of uncertainty and fuzziness,and to guarantee the reliability and availability of the maneuver decision result,fuzzy logic is adopted to build the maneuver decision objective function.Fig.4 shows the schematic of the air combat situation between a UCAV and an opponent aircraft.

Fig.4 Schematic of air combat situatio n
In Fig.4,red represents UCAV and blue represents opponent aircraft.D is the relative distance vector between red and blue,and is called the line of target sight.vrand vbare the velocity vectors of red and blue.ϑrand ϑbare the lead angles of red and blue,which are defined by the angle between velocity vector and line of target sight.Based on Fig.4,there are

Fig.4 shows the complexity of the angle relationship between red and blue.90°is the key turning point,which determines whether UCAV points towards opponent aircraft or is being pointed at by opponent aircraft.The angle relationship can be divided into four categories.
3.3.1 Angle factor membership function
Angle is a critical factor in air combat just as previously analyzed.Stern attack is the perfect situation for a pilot or UCAV,but being attacked by opponent aircraft in the tail is the worst situation.Stern attack is the condition when UCAV is in the tail of opponent aircraft and the opponent aircraft is within the attack area of UCAV.The target of air combat maneuver is to reach the attack area and launch weapons fire to opponent aircraft,while avoiding entering the attack area of opponent.The off-boresight launch ability of the missile is very important to enhance attack opportunities for UCAV.When the opponent aircraft is within the angle of off-boresight launch, the membership function of the angle factor is regarded as the perfect value 1. To improve reliability, an enhance factor κa is used to narrow the angle of off-boresight launch. Based on the above analysis,the membership function of the angle factor is built as follows:

where,κa< 1,ϑMis the off-boresight launch angle of the missile.
3.3.2 Height factor membership function
In the air combat game,the aircraft with superior height and velocity has the higher energy-maneuverability over the opponent[37],providing both initiative and situational advantages.The superior height advantage firstly provides the increased energy maneuverability of the UCAV itself,and thus provides the increased energy-maneuverability of the weapon subsequent to launch.However,there is an upper and a lower boundaries of the best relative height to maintain the height advantage.Within the region of the best relative height,we regard the membership function of the height factor as the perfect value 1.Based on the above analysis,the membership function of the height factor is built as follows:

where Δh=hr-hb,hrdenotes the height of UCAV,hbdenotes the height of opponent aircraft;ΔHupand ΔHdownare the upper boundary and lower boundary of the best relative height to maintain the height advantage for UCAV.κhis the enhance factor to ensure reliability of height advantage κh< 1.
3.3.3 Distance factor membership function
The fire control computer can calculate the attack area and the non-escape zone in real time.The attack area is the region in which the target will be attacked with a given probability,the non-escape zone is the region in which the tar-get will be attacked with a higher probability even if it runs at its maximum load or velocity.Therefore,the non-escape zone is smaller than the attack area.To ensure the distance advantage and improve attack probability,the non-escape zone is used to build the membership function of the distance factor.If the target is within the non-escape zone,the membership function of the distance factor reaches the perfect value 1;if the target is outside of the non-escape zone,an appropriate reward and punishment of distance is necessary to propel UCAV flying towards the non-escape zone.Therefore,the membership function of the distance factor is built as follows:


where nbmaxis the maximum overload of opponent aircraft and q is the off-boresight angle of the missile.
3.3.4 Velocity factor membership function
The goal of building the velocity factor function is to guide UCAV entering the advantage area and form weapon attack conditions in the shortest time.Simultaneously,the velocity itself should keep relative superiority over opponentaircraft to well reply to the high dynamic environment.When the optimal weapon launch location or non-escape zone is reached,UCAV should fly at identical speed as opponent aircraft to keep the distance advantage;when UCAV is far from the weapon launch area or optimal location,it should speed up its velocity to shorten the distance.Therefore,the membership function of the velocity factor is built as follows:

where vmaxand vminare the maximum and minimum velocities of UCAV respectively;κv1< 1 and κv2< 1 are the enhance factors to ensure the availability of velocity advantage;vris the current velocity of UCAV and vbis the current velocity of opponent aircraft;δvis the allowable difference of relative velocity between UCAV and opponent aircraft.
3.4 Maneuver decision objective function
Maneuver decision is performed to optimize the following functions:

where ηiis the weight,representing the importance of the corresponding maneuver decision factor.These weights are set to adaptively adjust according to the combat situation assessed by Bayes’theorem in Section 4.
4.Situation assessment and weight adjustment strategy
4.1 Air combat game situation assessment
The air combat situation is mainly determined by the angle and distance between UCAV and opponent aircraft.Because relative height and relative velocity have only a tiny impact on the combat situation,to simplify the model and improve the calculation efficiency,these two factors are ignored in the assessment model of the air combat situation.Thus,the air combat situation assessment states are built as

where D is the relative distance vector between UCAV and opponent aircraft,ϑrand ϑbare lead angles of UCAV and opponent aircraft.
The outcome of the air combat game situation features four types that are:Γ =1,advantage;Γ =2,disadvantage;Γ =3,mutual safe;and Γ =4,mutual disadvantage.
In this section,the precise assessment of the air combat game situation is made based on Bayes’theorem.The probabilities of air combat game situation outcomes for UCAV at the stage k+1 can be calculated via

According to Bayes’theorem[39–41],there is
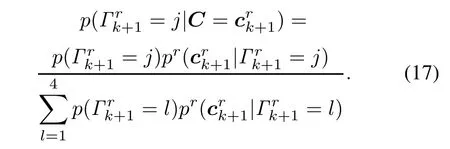
Considering that the situation changes so quickly during the highly dynamic autonomous air combat process,the assessment process of the air combat situation is regarded as a Markov process,which means that the current combat situation is determined only by the current combat state and there is nothing to do with the previous situation.

where j=1,2,3,4,k=1,...,n-1.
Thus,there is
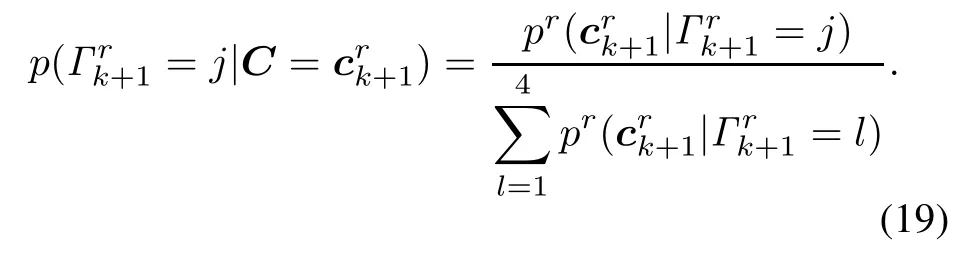
Situation assessment elements ϑr,ϑband D are assumed to be independent with a particular situation outcomeThus,the conditional joint probability density function can be calculated by

where the conditional likelihood function pϑr(·),pϑb(·)and pd(·)are defined in Table 1.In Table 1,Dadvis the ef-fective distance to track opponent aircraft for UCAV.Thus,Dadvis an important parameter to determine the air combat situation.
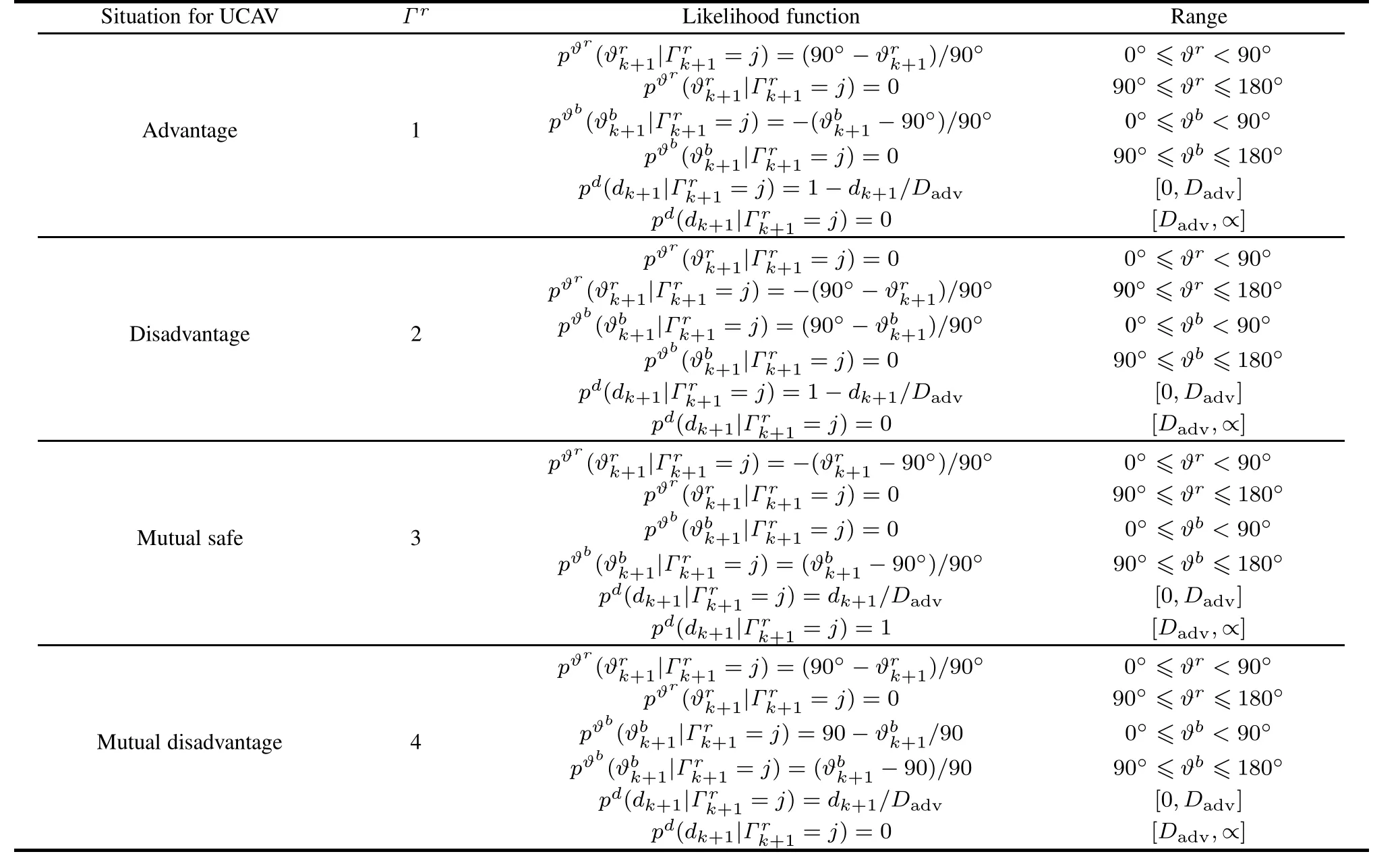
Table 1 Conditional likelihood functions of situation assessment states
4.2 Weight adjustment strategy for maneuver decision factors
The advantage situation is the condition that UCAV is in the tail of opponent aircraft and the distance between them is within the effective track scope.In this situation,UCAV should shorten the distance,maintain the angle advantage,and increase both the height advantage and velocity advantage.Thus,the weight of the distance factor is maximal,followed by the angle factor,while the height factor and the velocity factor are the last.
The disadvantage situation is opposite to the advantage situation,where UCAV is pursued by opponent aircraft in the tail.In this situation,UCAV should enlarge the distance and increase the lead angle of the blue aircraft to escape from the attack area of blue as quickly as possible.Thus,the most important two factors are distance and the lead angle of blue,and velocity factors and height factors play less important roles.
The mutual safe situation is the condition that both aircraft are splitting from each other,the distance increases as the time goes.In this situation,UCAV should maximize the angle factor to quickly reach the condition of the advantage situation,and the next is the height factor and velocity to acquire superior energy-maneuverability.
The mutual disadvantage situation is the condition that UCAV and blue aircraft are both heading towards each other or engaging in tail chasing.Similar to the mutual safe situation,UCAV should simultaneously enhance the angle advantage,height advantage and velocity advantage to acquire large energy-maneuverability and initiative.Therefore,the weights of maneuver decision factors are given according to the above analysis and preliminary simulation test, which is shown in Table 2.

Table 2 Weights of maneuver decision factors
5.Numerical simulation and analysis
5.1 Typical scenario test
To testify the efficiency of the method designed in this paper,in this section tests are performed in three typical scenarios which are head-on,tail chase and side,respectively.Terminal condition:|ϑr|≤ 150,D ≤ 1 000 m and 0 m≤hr-hb≤1 000 m.
5.1.1 Attack on head-on
In the starting stage,the UCAV is tail chased by the blue aircraft,as the blue is superior to UCAV on the height situation.In the later stage,UCAV climbs up and turns up to face the blue aircraft on head-on.In the last stage,the UCAV performs a semi-loop and firstly forms the attack condition.The attack process is shown in Fig.5.In Fig.5(a),cyan represents the blue aircraft and red ‘MIG’represents the UCAV,rhombus represents the starting points,which are the same in the all following simulations.


Fig.5 Attack on head-on simulation result
5.1.2 Attack on tail chase
In the beginning,UCAV is in the tail of the blue aircraft,while the blue aircraft is in a higher height.The attack process is shown in Fig.6.From the simulation result,it can conclude that the UCAV successfully completes the attack mission.
5.1.3 Attack on side
In this section,the UCAV and the blue aircraft are parallel in the initial condition;the blue aircraft is flying straightly,while the UCAV firstly performs a climb up and then go towards to the blue aircraft,and then forms the attack condition in the last stage.The attack process is shown in Fig.7.
5.2 Close-in dog fight
In the previous section we conduct the typical scenario test,and in this section we will conduct more violent closein dog fight tests on various conditions.The two aircrafts use the same dynamic model and they have the same flight boundary;the only difference is which maneuver method it uses.
5.2.1 Dog fight with elementary maneuver method(without position prediction)
In this simulation,comparison is made with the famous elementary maneuver method.UCAV is equipped with the method designed in this paper but without position prediction,while the blue aircraft uses the elementary maneuver method.
The combat results are shown in Fig.8.Fig.8(a)shows the complicated dog fight process,where the red ‘MIG’(UCAV) firstly reaches the terminal attack condition.Fig.8(b)and Fig.8(c)indicate that the UCAV maintains a good situation in the later 40 s,which keeps in an advantage situation.Fig.8(d)and Fig.8(e)are the overloads changing processes,while both aircrafts have the same overload boundary,but actually the blue aircraft is equipped with a bigger changing capacity,which can suddenly change from ten to minus ten,while the UCAV can just change from zero to minus ten.Fig.8(f)and Fig.8(g)are the bank angle changing processes,Fig.8(g)indicates that the blue aircraft does not have enough alteration to cope with the complicated dog fight,which is another important drawback of the elementary maneuver method.To summarize,the designed method in this paper is much more efficient than the elementary maneuver method,even the UCAV makes no use of the position prediction.

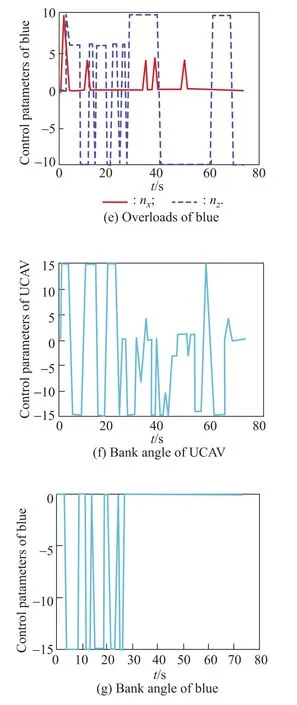
Fig.8 Dog fight result without position prediction

Fig.9 Dog fight result with position prediction
5.2.2 Dog fight with elementary maneuver method(with position prediction)
To further demonstrate the efficiency of position prediction,the integrated method designed in this paper is used by UCAV.The blue aircraft is also equipped with the elementary maneuver method.The dog fight results are shown in Fig.9.UCAV reaches the attack condition in 43 s,which is much smaller than that of without position prediction simulation results.Fig.9(b)and Fig.9(c)indicate that UCAV maintains a better situation and advantage level than that of previous simulation(without position prediction),which strongly proves the effectiveness of position prediction.Fig.9(d)is the position prediction error,which demonstrates that the prediction error is limited within the scope of validation.
5.2.3 Self-combat with or without situation assessment
This simulation is mainly to test the effectiveness of the situation assessment and weights adaptive adjustment stra-tegy.UCAV and the blue aircraft use the same model and the same method,where the only difference is that the UCAV is equipped with the situation assessment and weights adjustment strategy,whereas the blue aircraft is not.The maneuver decision factor weight of blue is set to be: η1=0.25,η2=0.25,η3=0.25,η4=0.25,while that of UCAV changes with the outcome of situation assessment according to Table 2.The combat result is shown in Fig.10.UCAV wins the combat game in 82 s when it first forms the attack condition,which demonstrates the effectiveness of the situation assessment and weights adaptive adjustment strategy.At the same time,the simulation result demonstrates the intensity of the dog fight in close-in distance.

Fig.10 Self-combat result with or without situation assessment
6.Conclusions
Autonomous air combat is the final form for UCAV to join in the air combat game,and autonomous maneuver decision is a critical part to reach a higher level of autonomy.Situation plays a vital role in air combat and should be used as the precondition to make a good maneuver decision.Thus,this paper builds a new maneuver decision system which adaptively adjusts the weights of maneuver decision factors according to the air combat situation assessed via Bayesian inference theory,which makes the objective function more reasonable and ensures the superiority situation for UCAV.The air combat game should be regarded as a Markov process that can guarantee the effectiveness of situation assessment.Precise prediction of opponent air-craft is another important part to ensure a desired maneuver decision result.Simulation results demonstrate the intensity of the air combat game and display the drawbacks of the element maneuver method. Comparative simulations sufficiently indicate the efficiency of the method designed in this paper for UCAV autonomous maneuver decision.
[1]ERNEST N,CARROLL D,SCHUMACHER C,et al.Genetic fuzzy based artificial intelligence for unmanned combat aerial vehicle control in simulated air combat missions.Journal of Defense Management,2016,6(1):144.
[2]KARIMI J,POURTAKDOUST S H.Optimal maneuver-based motion planning over terrain and threats using a dynamic hybrid PSO algorithm.Aerospace Science and Technology,2013,26(1):60–71.
[3]FRAZZOLI E,DAHLEH M A,FERON E.Real-time motion planning for agile autonomous vehicles.Journal of Guidance,Control and Dynamics,2002,25(1):116–129.
[4]HUANG C Q,DING D L,Huang H Q,et al.Autonomous attack technology for UCAV.Beijing:National Defense Industry Press,2014.(in Chinese)
[5]DoD.Unmanned systems integrated roadmap:FY2013-2038.Washington DC:Office of the Under Secretary of Defense(Acquisition Technology and Logistics),2013.
[6]AUSTIN F,CARBONE G,HINZ H,et al.Game theory for automated maneuvering during air-to-air combat.Journal of Guidance,Control,and Dynamics,1990,13(6):1143–1149.
[7]PARK H,LEE B Y,TAHK M J,et al.Differential game based air combat maneuver generation using scoring function matrix.International Journal of Aeronautical and Space Sciences,2016,17(2):204–213.
[8]CHE J,QIAN W Q,HE Z C.Attack-defense confrontation simulation of air combat based on game-matrix approach.Flight Dynamics,2015,33(2):173–177.(in Chinese)
[9]POROPUDAS J,VIRTANEN K.Game-theoretic validation and analysis of air combat simulation models.IEEE Trans.on Systems,Man,and Cybernetics-Part A:Systems and Humans,2010,40(5):1057–1070.
[10]SUN T Y,TSAI S,LEE Y,et al.The study on intelligent advanced fighter air combat decision support system.Proc.of the IEEE International Conference on Information Reuse&Integration,2006:39–44.
[11]VIRTANEN K,RAIVIO T,RAIMO P H.Decision theoretical approach to pilot simulation.Journal of Aircraft,1999,36(4):632–641.
[12]ZHONG L,TONG M A,ZHONG W,et al.Sequential maneuvering decisions based on multi-stage influence diagram in air combat.Journal of Systems Engineering and Electronics,2007,18(3):551–555.
[13]VIRTANEN K,RAIVIO T,HÄMÄLÄINEN R P.Modeling pilot’s sequential maneuvering decisions by a multistage influence diagram.Journal of Guidance,Control,and Dynamics,2004,27(4):665–677.
[14]MCGREW J S,HOW J P,WILLIAMS B,et al.Air combat strategy using approximate dynamic programming.Journal of Guidance Control&Dynamics,2010,33(5):1641–1654.
[15]MCGREW J S.Real-time maneuvering decisions for autonomous air combat.Massachusetts,U.S.:Massachusetts Institute of Technology,2008.
[16]MA Y,MA X,SONG X.A case study on air combat decision using approximated dynamic programming.Mathematical Problems in Engineering,2014:18340.
[17]MUKAI H,TANIKAWA A,TUNAYI,et al.Sequential linear quadratic method for differential games with air combat applications.Computational Optimization and Applications,2003,25(1/3):193–222.
[18]MAURO P,BRUCE A C.Numerical solution of the three dimensional orbital pursuit-evasion games.Journal of Guidance,Control,and Dynamics,2009,32(2):474–487.
[19]HORIE K,CONWAY B A.Optimal fighter pursuit-evasion maneuvers found via two-sided optimization.Journal of Guidance,Control,and Dynamics,2006,29(1):105–112.
[20]IMADO F,KURODA T.Family of local solutions in a missile aircraft differential game.Journal of Guidance,Control,and Dynamics,2011,34(2):583–591.
[21]FU L,XIE F,WANG D,et al.The overview for UAV air-combat decision method.Proc.of the 26th Chinese Control and Decision Conference,2014:3380–3384.
[22]ENDSLEYM R.Asurvey of situation awareness requirements in air-to-air combat fighters.International Journal of Aviation Psychology,1993,3(2):157–168.
[23]RAO N P,KASHYAP S K,GIRIJA G.Situation assessment in air-combat:a fuzzy-Bayesian hybrid approach.Proc.of the International Conference on Aerospace Science and Technology,2008:063.
[24]GALLAGHER M,MACKENZIE C,BLUM D,et al.Improving risk assessment communication.Military Operations Research,2016,21(1):5–20.
[25]NGUYEN D,FISHER D C,RYAN L.Agraph-based approach to situation assessment.Proc.of the AIAA Infotech Aerospace,2010:1–6.
[26]PREVOST C G,THéRIAULT O,DESBIENS A,et al.Receding horizon model-based predictive control for dynamic target tracking:a comparative study.Proc.of the AIAA Guidance,Navigation,and Control Conference,2009:1–9.
[27]KARELAHTI J,VIRTANEN K,RAIVIO T.Near-optimal missile avoidance trajectories via receding horizon control.Journal of Guidance,Control,and Dynamics,2007,30(5):1287–1298.
[28]ZHANG Y,CHEN J,SHEN L.Real-time trajectory planning for UCAV air-to-surface attack using inverse dynamics optimization method and receding horizon control.Chinese Journal of Aeronautics,2013,26(4):1038–1056.
[29]VIRTANEN K,KARELAHTI J,RAIVIO T.Modeling air combat by a moving horizon influence diagram game.Journal of Guidance,Control,and Dynamics,2006,29(5):1080–1091.
[30]KOUBA G,BOTEZ R M,BOELY N.Fuzzy logic method use in F/A-18 aircraft model identification.Journal of Aircraft,2010,47(1):10–17.
[31]ERNEST N,COHEN K,KIVELEVITCH E,et al.Genetic fuzzy trees and their application towards autonomous training and control of a squadron of unmanned combat aerial vehicles.Unmanned Systems,2015,3(3):185–204.
[32]AKABARI S,MENHAJ M B,NIKRAVESH S K.Fuzzy modeling of offensive maneuvers in an air-to-air combat.Proc.of the Computational Intelligence,Theory and Applications,2005:171–184.
[33]PASHAYEV A,ASKEROV D,SADIQOV R,et al.Fuzzyneural approach for aircraft gas turbine engines diagnosing.Proc.of AIAA Intelligent Systems Technical Conference,2006:484–486.
[34]HÜLNHAGEN T,DENGLER I,TAMKE A,et al.Maneuver recognition using probabilistic finite-state machines and fuzzy logic.Proc.of the IEEE Intelligent Vehicles Symposium,2010:65–70.
[35]WANG Y J,DONG J,LIU X,et al.identification and standardization of maneuvers based upon operational flight data.Chinese Journal of Aeronautics,2015,28(1):133–140.
[36]DONG Y,AI J.Trial input method and own-aircraft state prediction in autonomous air combat.Journal of Aircraft,2012,49(3):947–954.
[37]HERBST W B.Dynamics of air combat.Journal of Aircraft,1983,20(7):594–598.
[38]HUI Y L,NAN Y,CHEN S D,et al.Dynamic attack zone of air-to-air mission after being launched in random wind field.Chinese Journal of Aeronautics,2015,28(5):1519–1528.
[39]MCDAID A F,MURPHY T B,FRIEL N,et al.Improved Bayesian inference for the stochastic block model with application to large networks.Computational Statistics&Data Analysis,2012,60(4):12–31.
[40]VIERTL R,SUNANTA O.Fuzzy Bayesian inference.Metron,2013,71(3):207–216.
[41]SYNNAEVE G,BESSIERE P.Special tactics:a bayesian approach to tactical decision-making.Proc.of IEEE Conference on Computational Intelligence and Games,2012:409–416.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Heterogeneous performance analysis of the new model of CFAR detectors for partially-correlated χ2-targets
- Quantum fireworks algorithm for optimal cooperation mechanism of energy harvesting cognitive radio
- Cognitive anti-jamming receiver under phase noise in high frequency bands
- Multi-channel signal parameters joint optimization for GNSS terminals
- Waveform design for radar and extended target in the environment of electronic warfare
- Cramer-Rao bounds for the joint delay-Doppler estimation of compressive sampling pulse-Doppler radar